基于机器视觉的列车部件故障诊断方法综述
2022-01-28 03:00刘子仪李兆新陈建强李书盼陆其波宋威宏
计算机应用与软件 2022年1期
刘子仪 李兆新 陈建强 李书盼* 陆其波 宋威宏
1(西南交通大学电气工程学院 四川 成都 611756) 2(华南理工大学电子与信息学院 广东 广州 510500) 3(广州地铁集团有限公司 广东 广州 510310)
0 引 言
目前,列车故障检测和预防大都是人工模式,需要列车在连续运行一天或者几天后入库进行整体检修,整个检修过程效率低,无法保证检修质量。随着列车数量的不断增加,传统的列检方式已经不能满足当今高铁运营发展的急迫需要。因此,有必要将计算机视觉技术应用到列车部件故障检测中来,通过在列车检修处安装一系列的摄像头,对摄像头采集的图像进行畸变校正、配准和检测,从而判断列车关键部件是否发生故障以及故障种类和故障位置,进而提高列车检修效率和准确率。
基于计算机视觉的列车部件故障诊断技术常规流程如下:首先用摄像头等图像采集设备采集入库列车相关图像,并利用明显标志进行图像分割;接着利用图像配准技术对摄像头采集到的列车图像进行拉伸和压缩的恢复;然后在已恢复的列车图像上定位关键部件位置;最后对已定位的关键部件进行故障检测和维修。其中关键技术包括图像配准和列车关键部件故障快速精准检测等。
1 图像配准
图像配准是指在不同时间、不同视角、不同传感器情形下,对同一场景采集得到的两幅图像进行几何对齐。不同的配准问题有对应的最合适配准方法,需要具体分析应用场景的图像噪声干扰、传感器成像特点、几何形变规律、算法实时性等问题。
图像配准是计算机视觉领域中一个重要的研究方向,也是很多图像处理方法的重要前提,在物体识别、目标跟踪、图像拼接、图像合成等诸多问题上有重要运用。图像预先配准的精度通常关乎到后续处理流程的性能。国外从20世纪60年代开始研究图像配准问题[1],并在20世纪末基本解决了单模图像配准问题。国内研究起步相对较晚,从20世纪90年代初才开始涉足图像配准领域。图像配准可以应用于卫星遥感、医疗图像、机器视觉等多个领域,在实际应用时针对不同问题,使用的方法可能有所不同,但是关键处理步骤大体相同。大多数图像配准会有特征提取、特征匹配、图像变换这三个环节,文献[2]详细地介绍了一些通用的图像配准方法。
1.1 特征提取
图像特征大致分为区域特征、线特征、点特征[3]。图像中某些区域、线段或点在旋转、缩放和倾斜中是保持不变的,且能在环境噪声、灰度拉伸等条件下保持稳定。这些特征通常是图中一些具有高对比度的部分[4]。
(1)区域特征提取。文献[5]对图像进行分割,提取图像中的闭边界区域,以封闭边界区域的重心为控制点,建立控制点之间的对应关系,实现了图像亚像素级精度的配准。文献[6]使用一个不包含边缘点的虚拟圆背景区域来寻找平移或缩放关系,并使用平滑准则来消除噪声对虚拟圆的影响。文献[7]在角点检测中提出了放射不变邻域的概念,并解释了Harris的角点检测算法估计图像曲率的方式。上述提出的检测器只适用于“L”节点,并且文章仅在图形几何上实验,未表明适用于现实情况下的实际数据。文献[8]通过检测最大稳定极值区域下的仿射不变结构获取仿射帧,并根据仿射帧中光度计正态化的颜色测量值建立映射关系。
(2)线特征提取。文献[9]针对光学图像与SAR图像的配准问题,提出了一种基于主动轮廓模型的弹性轮廓匹配方案,能有效克服大量相干斑噪声,具有更高的鲁棒性和更低的控制点均方根误差。该算法的局限性在于要求从光学图像中检测出定义良好的强轮廓作为初始轮廓。文献[10]提出根据多模态医学图像模糊边缘和脊形图像实现精确配准。该算法局限性在于不需要交互,因此缺乏人的主体性。
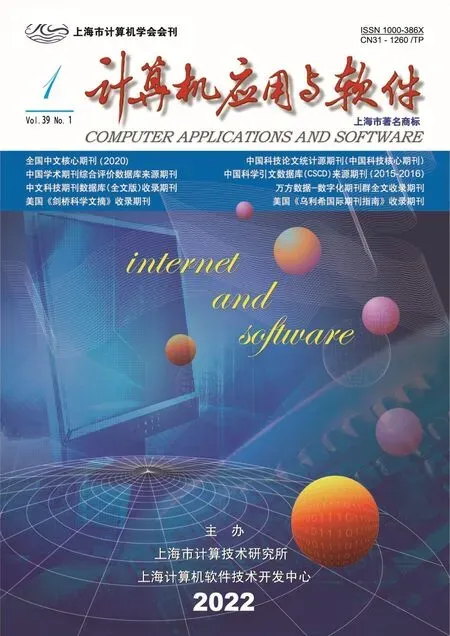
(3)点特征提取。文献[11]提出了几种无须预先分割的灰度图像角值测量技术,利用图像函数的二阶偏导数进行角检测。文献[12]开发了一种强大的角点检测器,解决了图像函数二阶导数的角点检测器对噪声敏感的问题。文献[13]以中心像素相同颜色的区域作为标准,提出了基于最小化局部图像区域的特征检测器,提出了基于平滑邻域的降噪方法。文献[14]设计了新的角点检测算法,采用了多重网格方法,大大加快检测速度。但是该算法的稳定性和一致性均稍低于Harris角点检测算法。文献[15]提出了一种新的旋转不变量方法,并设计了一种参数化角点检测器,用于处理模糊和噪声图像。虽然该方法适用于任何图像,但由于具有较高的一致性,是模糊图像的局部检测方法。文献[16]设计了一种基于正则化理论并支持三维数据的角探测器。Harris检测器[17]是与Forstner检测器相似的又一种角点检测器,其角点检测效果如图1所示。但是算法本身对尺度很敏感而且不具备几何尺度不变性,算法提取到的角点是像素级的,在很多情况下不够精确。
(a) (b)图1 Harris角点检测
1.2 特征匹配
特征匹配是指建立两幅图像中共有特征之间对应关系的过程。从待配准图像中提取出特征后,依据图像中灰度的邻域信息、特征的空间分布或特征的符号描述进行特征匹配,寻找参考图像和待配准图像的特征对应关系。特征匹配的方式主要分为基于空间关系和基于不变描述符两类。
(1)基于空间关系的特征匹配。文献[18]描述了基于图形匹配算法的配准,为了减小搜索域,提出了一种子集选择方法以加快匹配速度。文献[19]使用聚类的方法形成所有可能的图像特征对和模型特征对,对图像方向和内容的变化具有更强的鲁棒性。文献[20]引入了斜面匹配的新技术,比较两组形状碎片的尺寸,允许在形状的基础上匹配广泛的空间特征。在此文献基础上,文献[21]提出了一个改进的版本。
(2)基于不变描述符的特征匹配。部分文献使用星型、矩形、多边形等封闭边界区域作为特征[22];有的文献使用基于矩不变量来描述封闭边界区域特征[23-24];还有一部分文献使用基于特征对几何不变性的描述符[25-27]。
1.3 图像变换技术
图像变换是图像配准成功的关键之一,选择不同的图像变换技术将直接影响图像配准的最终效果。因此在选择图像变换的模型时,必须对图像的性质进行综合分析,选择最为合适的变换方法。下面简要介绍图像变换的基本原理及其在图像配准中的应用。
在图像变换中,两幅图像的映射关系大体分为线性变换和非线性变换。其中线性变换包含有刚体变换和非刚体变换。刚体变换在图像变换中最为简单,两幅图片之间只需要三个自由度的映射关系,变换后点与点的距离不发生改变,这意味着图像只能实现旋转和平移。刚体变换适用于具有同一个视角、来自同一个传感器不同拍摄位置的图像配准,在医学图像中刚体变换运用较多[28-29]。然而,在实际问题中非刚体形变居多,因此刚体变换在实际应用中具有很大的局限性。非刚体变换包括相似变换、仿射变换、透视变换,其两幅图像之间映射自由度依次增加。
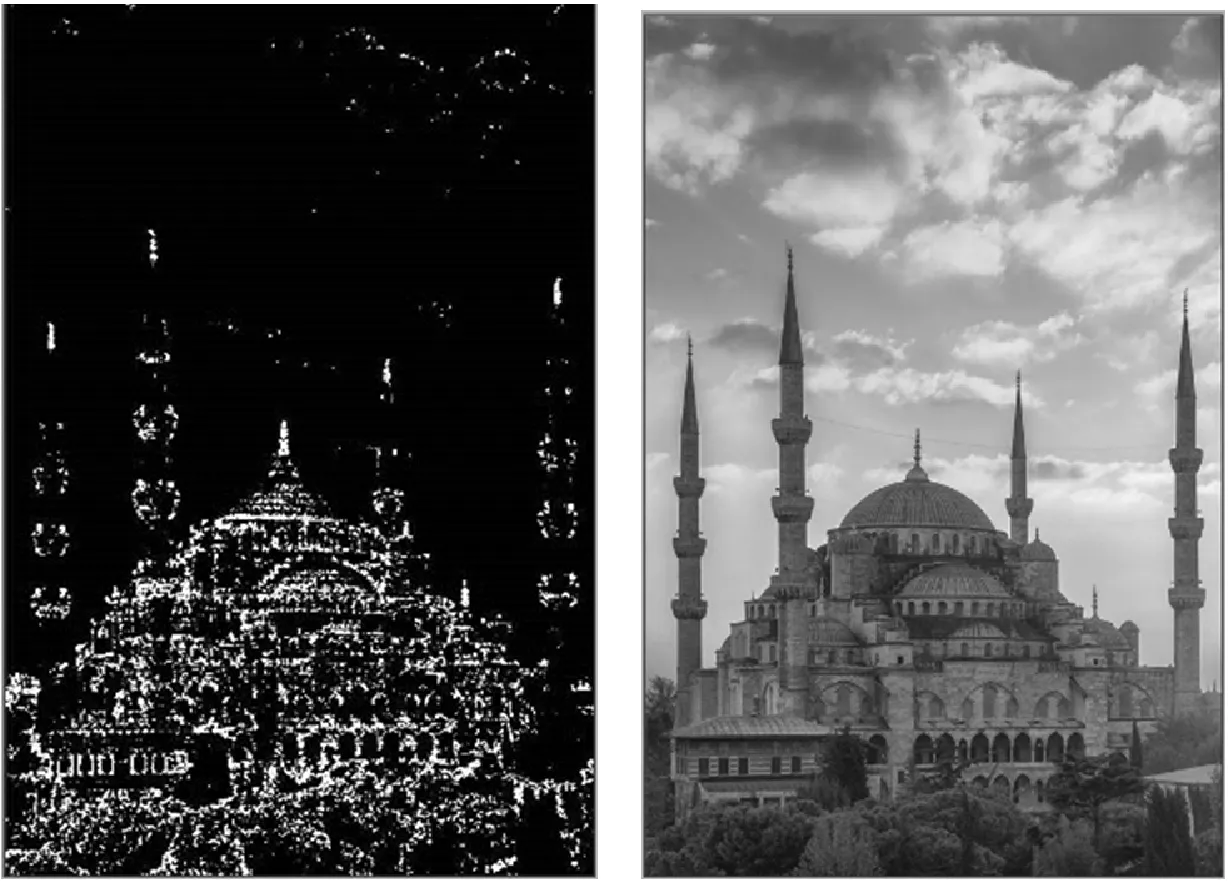
非线性变换不以自由度为划分依据,其映射函数形式多种多样。在进行非线性变换时,图像中各像素点之间的相对位置关系根据映射函数连续变化。最常见的非线性映射变换是弹性变换,其在医学图像配准问题上应用最为广泛[30-32]。图2展示了不同图像变换的效果。
a)原图像 (b)图像刚体变换后的效果 (c)图像相似变换后的效果
1.4 图像配准在列车关键部件检测的应用
由于列车在高速运动中会因为连接部件的形变和减震器而导致车厢间相对运动,对于像素级图像配准问题来说需要较高的精度,因此不能将列车运动视为刚体运动。而CCD线阵相机采集到的列车图片也会由此产生较大的畸变,在整幅列车图像中会存在部分图像段压缩、部分图像段拉伸的现象。针对上述问题,在列车关键部件故障检测之前需要对整幅列车图像进行精确配准,确保整幅列车图像各个位置都不会存在偏移和畸变,之后从整幅图中以固定坐标提取的部件图像就会非常精确,为后续的各个项点单独检测提供了基础。
文献[33]提出了一种改进的模板匹配算法对两幅图像进行粗略对齐,并采用增强相关系数算法(ECC)进行精确对齐。文献[34]提出了采用两个线结构光传感器完成列车轮对车轮轮缘检测的技术方案,研究了在频域内进行列车轮对三维点云的准确配准方法。此方法的缺陷在于其检测精度和算法本身适应性较低,尚不满足实际要求。文献[35]利用模板进行比对检测护栏缺失、异物入侵等运行环境异常情况,提出D-SIFT特征描述子,成功地将深度信息运用于前向运动图像的图像配准中。此方法的局限性在于其不能精确复原图像不同子块内部的细节纹理,也无法完全精确地反映实际的光照变化情况。文献[36]在动态测量钢轨磨耗参数时,提出了一种基于动态窗口曲率熵的轨腰圆弧自动分割方法,实现了实测轮廓与标准设计轮廓的空间配准,但是其算法实时性较差,仅能适用于160 km/h速度以下的列车。文献[37]在列车运行故障图像的动态检测中,结合SIFT特征,提出了一种基于分块方式的图像配准方法。文献[38]在使用结构光传感器测量车轮踏面轮廓数据时,提出了一种利用傅里叶变换和还原矩阵配准点云的方法。该方法可靠性较高,但是轮对车轴定位中心孔的加工质量、有无磕碰的情况会影响结果,需要在一致性上进一步研究。文献[39]提出了一种基于激光扫描结合点云处理的车顶异物检测方法,使用了基于相关熵度量的鲁棒ICP算法进行点云配准,实现较高的配准精度和较快的收敛速度。但是以上方法在实际的实施过程中还存在一些问题,文献实验仅限于在实验室环境中,无法模拟实际列车运行中的列车晃动问题。文献[40]针对车底光照变化影响较大、整体灰度值较暗、结构复杂的问题,提出了一种基于轨边图像SURF特征的车底部件异常检测算法,在匹配过程中加入了阔值调节模块。文献[41]对车厢图像与标准图像进行配准时,以互信息MI为相似度量函数,采用了基于灰度信息的配准方法。文献[42]在列车故障部位配准时,考虑到非线性的不均匀光照以及列车车型的不同,采用了基于区域图像灰度的几何、物理等方面特征进行配准。
2 列车关键部件故障检测
基于机器视觉的列车关键部件故障检测包括了图像处理的大部分内容,如图像预处理、特征提取、分类识别等。除了传统的图像检测方法外,目前机器学习和深度学习也广泛应用于目标检测中,并且取得了很好的效果。目前,基于机器视觉的故障诊断技术在国内外的研究还比较少,特别是针对包含多种类型的复合故障,还找不到一种通用的算法来实现检测。
在图像配准的前提下,列车关键部件故障检测需要运用多种图像处理技术,主要涉及图像预处理、特征提取和模式识别三个过程,相关技术有图像分割、边缘提取、Hough变换、图像匹配等[43-44]。同时,对列车关键部件进行分类和故障诊断需要综合运用诸如SVM、神经网络等多种模型[45-46]。
2.1 基于模板匹配的关键部件故障检测
模板匹配是模式识别的一种基本方法,其通过将图像中特定位置的目标对象与模板进行匹配,从而识别出图像中的特定物体。目前,模板匹配主要是通过图像灰度值相关性匹配实现。针对列车项点故障检测问题,可以运用模版匹配的方法来实现。具体地,通过将获得的图像与模版进行匹配,根据设置的阈值对模板匹配的结果进行判断,从而识别出物体故障[47-48]。
模板匹配算法有多种,需要针对不同的情形采用不同的算法。特别地,当识别对象具有较好的轮廓或边缘时,采用基于轮廓的模板匹配算法识别效果较好。文献[49]在列车零部件故障诊断中,运用了基于轮廓的模板匹配算法,实现了螺栓松动和丢失等故障检测。该算法对传统的基于灰度的匹配方法进行了改进,提高了识别精度和速度。一次模板匹配如图3所示。将图像预处理后的模版与原图匹配,得到匹配后的灰度图,将其进行图像处理后再与经图像处理的模板匹配,再设置阈值来判读故障。实验表明该算法在实际应用中匹配率高,同时还提高识别速度和精度,有效减少了光照的影响及像素失真问题。

(a)预处理后的模板
文献[50]针对列车中的截断塞门故障识别问题,提出了基于几何特征匹配和基于形状特征描述子匹配两种识别方法。基于几何特征的匹配方法只需找出对象的外接矩阵特征进行对比即可实现故障识别。而基于形状描述子的匹配方法较为复杂,但是在截断塞门故障识别上具有更高的精度和更快的速度,实用性相较前者来说更强。
通过模板匹配的方法实现列车关键部件故障诊断,需要检测部件具有清晰的轮廓或边缘,如螺栓、扭杆等部件,这种方法对于与模板图有较高相似率的样本图有较高的识别率,但在实际应用中局限性较大、鲁棒性较差,不能有效解决图像中识别对象变形等问题。
2.2 基于支持向量机的关键部件故障检测
支持向量机(SVM)是基于Vapnik的统计学习理论和结构风险最小化原理的一系列学习算法,已成功应用于各种分类识别任务中,如3D图像识别、人脸识别、语音识别等。在解决小样本识别、非线性分类及高维模式识别等问题中具有独特优势。在项点检测中,运用SVM作为分类器,结合特征提取方法,对特征进行分类,从而实现故障检测。
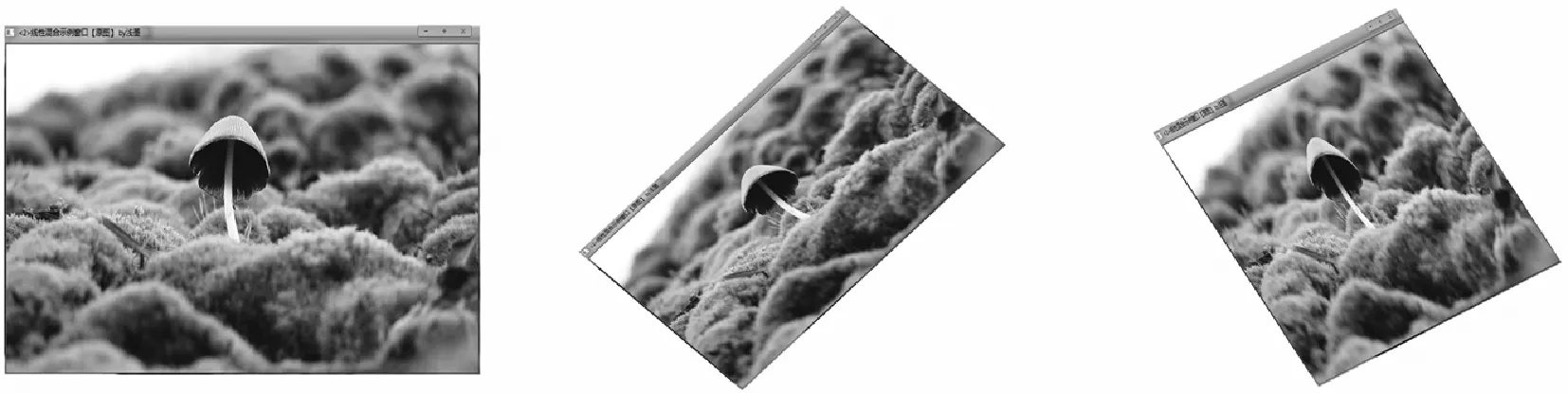
文献[51]提出利用梯度编码直方图和SVM来分析列车角度旋塞图像,实现了列车角斗上手柄缺失故障的诊断,准确率达到了99.8%。文献[52]在源图像中提取感兴趣区域,利用梯度编码直方图和SVM来进行列车中制动蹄键的定位,最后再通过训练SVM分类器实现制动蹄键的故障识别。实验表明该系统具有良好的识别精度和实时性。文献[53]针对火车的挡键、枕簧和侧立柱部位的故障图像,将PCA与SVM结合实现火车部件故障诊断,展现了SVM分类器在货车故障图像识别领域的优秀性能。文献[54]针对货车螺栓故障检测,将HOG特征与SVM进行结合,通过HOG方法进行特征提取,利用SVM进行分类,实现螺栓丢失故障的检测。图4为利用HOG特征和SVM对转向架部位的螺栓进行定位和故障检测结果。可以看出,HOG特征与SVM相结合的方法在故障检测中具有很好的效果。
(a) (b)图4 基于支持向量机的螺栓检测
基于支持向量机的方法多用于列车侧立柱、挡键、螺栓、闸片等部件的故障检测。该方法适合小样本的故障检测,尤其是对于列车难以获取图片的情况[55-56],但需要根据不同的场景选取不同的特征提取方法,如HOG特征、LBP特征,很难设计一种统一的方法来同时检测和识别各种故障。
2.3 基于深度学习的关键部件故障检测
人工神经网络(ANN)在基于图像的故障检测方面表现出明显的优越性[57-58]。然而人工神经网络进行故障诊断需要人工选取特征,将会影响神经网络最终的识别精度。
现如今,深度学习是图像识别的热门方向,其独有的图像特征自主挖掘特点使其更受研究者青睐。2012年AlexNet模型的提出更是掀起了深度学习在图像识别领域的热潮。一个典型的基于卷积神经图像识别模型如图5所示。其基本原理是首先对图像进行区域划分,然后对图像进行特征提取,经过一系列的处理后,根据输出的图像特征对每个区域进行分类,最终达到图像识别的目的。
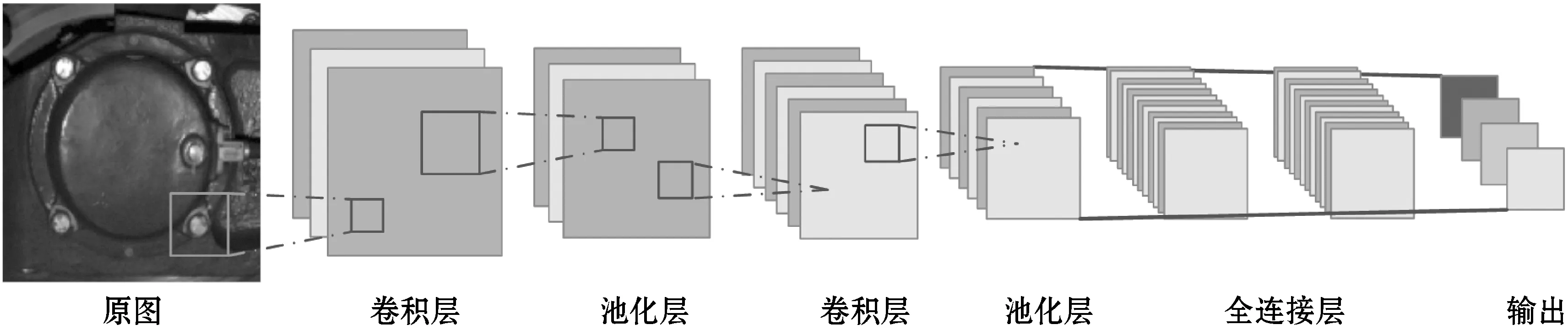
图5 基于卷积神经网络的图像识别模型
近年来,研究者提出了一系列基于CNN模型的目标检测算法,如R-CNN、Fast R-CNN、Faster R-CNN算法,以及SSD、YOLO算法,不断提高对目标的检测精度和速度。同时也有一系列基于深度学习图像分割算法被提出,如FCN、Mask R-CNN算法等。基于深度学习的项点检测方面,在拥有大量图像数据的基础上,可以通过目标检测算法和图像分割算法进行网络训练,实现项点故障的识别、定位、分割。传统的基于图像处理技术的故障识别需要通过对图像特征进行提取,这需要依赖大量可观察的显著图像信息,因此对于一些信息不足的微小部件,识别精度会较低。而基于深度学习故障检测方法则较好地解决了此类问题,因此在故障检测方面具有巨大潜力。文献[59]以检测列车中心板螺栓为例,提出了一种将传统视觉检查与深度学习相结合的检测方法,即首先采用传统的特征提取方法近似定位目标,然后利用一种复合积神经网络进行训练,其结构如图6所示。实验结果表明该方法具有很强的数据挖掘和分类能力,取得了较高的准确率,且具有良好的光照稳健性。文献[60]利用卷积神经网络实现对列车四种典型故障即列车侧架键丢失、轴螺栓丢失、轴螺栓松动和螺栓丢失的识别。与基于HOG、Adaboost和SVM结合的模型相比,基于CNN的模型准确率更高,鲁棒性更强。
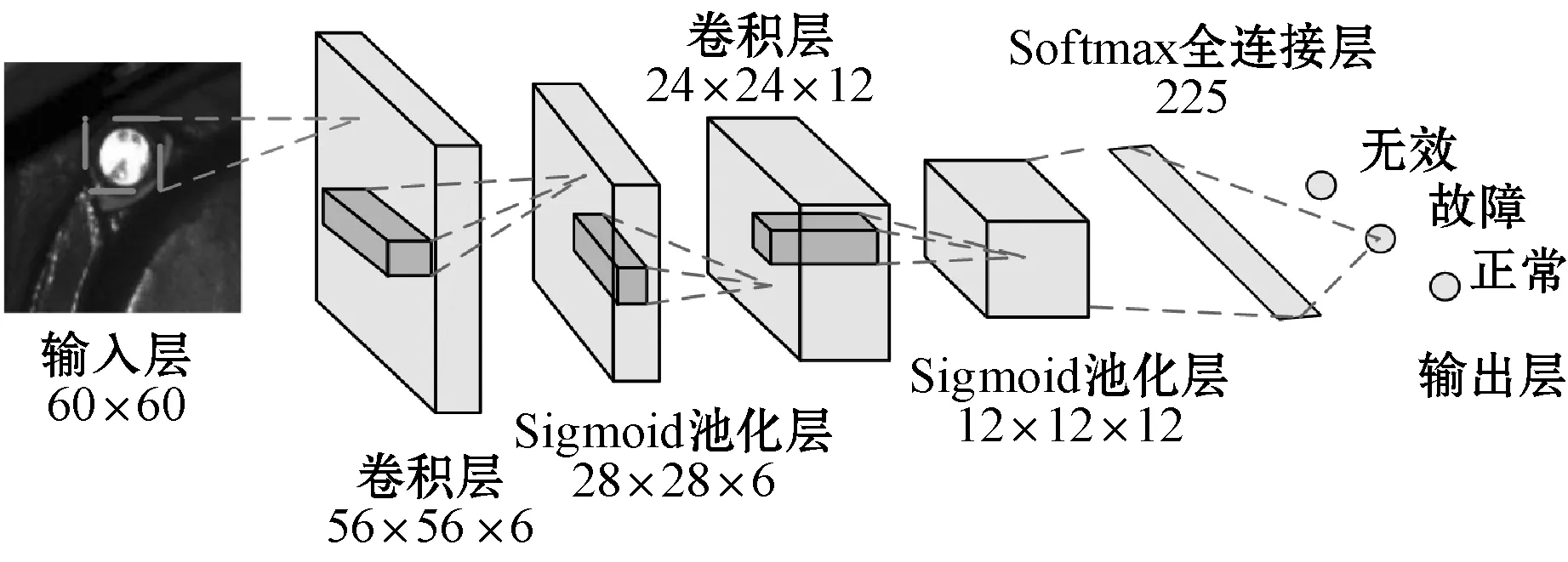
图6 基于卷积神经网络的螺栓故障检测模型
在支撑列车运行的其他相关设备故障诊断中,文献[61]针对接触网支撑装置上紧固件的缺失和松动等缺陷,提出了一种基于深度卷积神经网络(DCNN)的缺陷检测方法。文中提出了一个三阶段的DCNN结构,结构如图7所示。具体地,首先通过SSD算法实现紧固件部位的定位,然后通过YOLO算法实现紧固件的定位,最后利用一个DCNN结构来实现紧固件的状态识别,以此实现了紧固件的缺陷检测,表明了该算法对紧固件的缺陷检测具有良好鲁棒性和较高的检测率,针对复杂的环境具有较好的适应性。
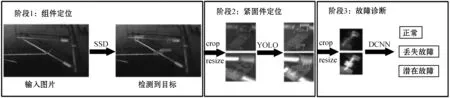
图7 三级级联DCNN结构
基于深度学习的列车关键部件故障诊断方法能够有效地解决由于恶劣天气、拍摄角度变化、光照变化等原因造成的一些低质量图像的问题[60,62]。与传统的机器学习方法不同,该方法采用端到端的方式学习原始图像,故可以处理更多不同形式的故障。然而,限于样本数量的问题,基于深度学习的列车关键部件故障诊断方法多用于螺栓、闸片、受电弓、锁扣等部件的故障检测。
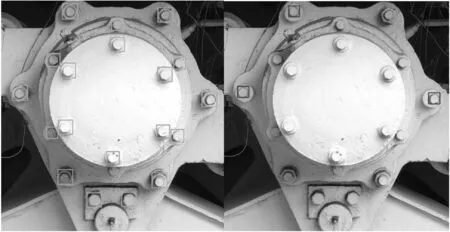
为比较不同模型对列车关键部件故障诊断的有效性,选取模板匹配、HOG结合一分类SVM、SSD512,以及Fatser R-CNN模型实现列车电气箱盖锁扣的故障检测。如图8所示,共包含4种电气箱盖,其正常锁扣形式以及故障锁扣形式如图9所示。
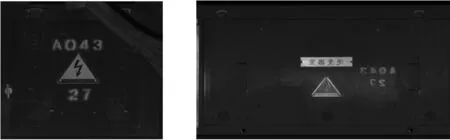
(a) (b)

(a)锁扣正常 (b)锁扣正常 (c)锁扣断裂 (d)锁扣丢失图9 锁扣状态
实际获取的电气箱盖锁扣样本存在不均衡的问题,故结合一分类的思想只利用正样本训练模型。最后,利用训练好的模型对157个正样本和6个负样本进行测试,四种模型的测试结果如表1所示。其中准确率、误检率和漏检率的定义如下:
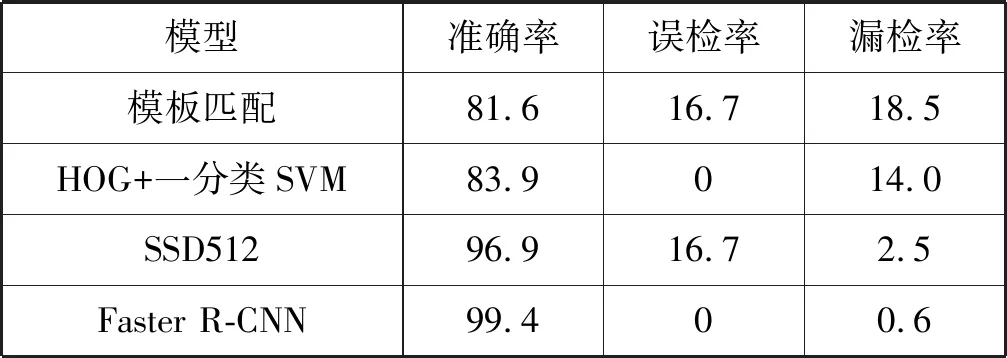
表1 四种模型测试结果(%)
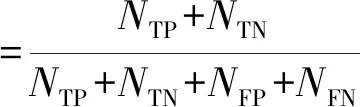
(1)
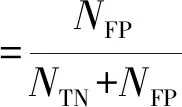
(2)
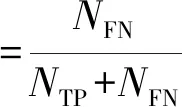
(3)
式中:NTP表示正样本被正确分类的数量;NTN表示负样本被正确分类的数量;NFP表示负样本被分为正样本的数量;NFN表示正样本被分为负样本的数量。从测试结果可以看出,传统的模板匹配算法由于鲁棒性低,易受环境干扰等原因使得检测精度较低,并且其误检率较高,不适用于实际项目。基于机器学习的HOG+SVM,能够提取样本的有效故障特征,从而提高检测精度。基于深度学习的SSD512和FasterR-CNN模型在提取样本故障特征时能避免光照、拍摄角度的变化,从而使得模型鲁棒性很强且检测精度也很高。
目前,随着采集的列车部件样本数量的不断增多,更多学者致力于研究基于深度学习的故障检测方法,从而避免环境复杂造成的影响,且模型泛化能力更强。
3 3D检测
随着3D技术的不断发展,实现列车部件故障诊断不再局限于2D图像。利用3D检测技术获得的三维点云数据不仅准确地记录了物体的空间坐标,还能记录物体的三维形貌,相对于二维数据增加了深度信息,从而提高故障检测的精度。
近些年来,三维立体测量技术在国际上已形成研究浪潮,美国、德国等在国际上具有领导地位,且先后研制出多种立体测量产品。目前3D目标检测主要依赖单目相机、双目相机、多线激光雷达获取输入数据。随着产业的优化升级,成本在不断降低,激光雷达搭配单目相机也变得越来越普遍。三维立体测量技术开始在诸多领域得到了实际的应用,比如通用汽车公司的车身快速检测系统[63]。
2019年西南交通大学的李金龙副教授使用激光线结构光扫描仪得到机车走行部三维点云数据,实现了在三维数据中对螺栓进行自动识别和定位[64-65]。在CVPR2019中香港中文大学和商汤科技王晓刚教授团队提出GS3D,采用单目摄像头获取数据作为算法输入,GS3D获取粗糙的目标的位置、尺寸、方向能够指导下一步物体属性的精细化工作。同时,提出使用物体表面提取的特征解决特征模糊问题,与现在SOT的RGB单幅图像3D目标检测方法进行了横向对比,包括Mono3D、Deep3DBox、DeepManta、MF3D和3DOP等,发现GS3D在各方面的指标均表现出了一定的优越性[66]。利用单目摄像头获取数据的方法往往在传感器方面会极大程度地节省成本,但是算法上要求会更高,甚至大多数情况下无法实现实时检测,比较适合线下检测。
随着3D检测技术的发展,将3D检测技术应用于轨道交通领域成为机器视觉的研究热点之一。文献[67]将3D激光扫描技术运用在城轨车辆组装检测中,通过该技术可以直接得到实物的三维模型,并将其与预先的三维数据进行对比分析,实现了产品的尺寸需求检测。3D检测技术已经基本趋向成熟,但对于大尺度物体,无法实现一次性完整扫描。因此手持激光扫描仪在轨道交通故障诊断领域的使用范围十分局限,比较适合工人巡检时对特定物体进行扫描,或巡检机器人上装配扫描仪进行诊断。文献[68]介绍了一种基于CCD图像处理的线结构光三维检测技术,实现了对火车轮对外径的三维检测。文献[69]在钢轨检测中利用相位测量轮廓,实现了对钢轨表面缺陷和形状的三维重建,再通过模板匹配的方式最终实现故障检测。基于CCD的三维检测技术在列车外形故障检测中具有抗光照干扰最好的效果,并且能够直接测量出车体零部件形变程度、磨损量等。然而由于CCD利用照射在物体表面的结构光反射回来的光进行深度值的测量,在深度值变化剧烈的区域,会存在数据缺失的可能。除了数据缺失问题,相机的安装环境也存在极大的困难,如检测列车车底,则需要在轨道上进行安装,列车行驶时产生的振动也会影响到采集精度。文献[70]利用3D扫描技术获取列车侧面和底部可见部件的外观图像,通过对图像中的特征点进行检测并使用标准模板进行图像配准,最后通过比较灰度值和评估特征匹配程度等方式实现列车部件故障识别。文献[71]使用高速3D摄像机获取铁路紧固件的实时图像,采用基于像素相似性或直方图相似性的方法对采集到的3D图像进行分析,最终实现对铁路紧固件的故障识别。利用模板匹配和相似度分析实现列车部件故障诊断,需要较高的计算时间,并且随着时间的推移需要更新模板库。除此之外其应用范围窄,某些故障并不能通过模板匹配或者相似度判断进行判断。随着获取数据量的增多,更多学者研究基于深度学习的故障诊断方法。文献[72]针对铁路表面的断裂、冲刷和磨损等横向缺陷,提出使用3D激光相机获取铁轨图像,并结合深度学习的方法来实现铁路表面缺陷检测。基于深度学习的方法进行缺陷检测的优势在于高速的识别速度、准确的识别结构。但是仍然存在致命缺陷,负样本数目过少,很容易出现过拟合的问题。文献[73]针对列车螺栓松动故障,提出了一种基于双目视觉的螺栓松动检测方法。首先,利用基于卷积神经网络模型对包括螺栓在内的关键部件区域行定位。然后再进行立体匹配和三维重建以检测螺栓松动故障。实验结果表明,该方法可以同时表征多个螺栓的松动,并且获得较高准确率,其相对误差控制在1.09%以内。双目视觉的立体匹配算法虽然在理论上已经基本成熟,但是在工程运用中仍然无法消除各种各样的干扰,因此纯粹的视觉双目相机工程使用很少,通常是辅助其他的相机(如红外相机)。
4 列车关键部件故障诊断发展趋势
实现列车关键部件故障诊断技术可以降低人工成本以及工人的劳动强度,同时提高列车关键部件的故障检测精度,防止列车在运行过程中发生重大事故。由上文可知,在整个列车关键部件故障诊断的流程中,很多方法仍然存在局限性。目前基于机器视觉的列车部件故障诊断方法还在不断完善和向前发展。其主要发展方向有以下3个:
1)在大数据背景下,列车关键部件的检测和故障诊断将不再局限于传统的图像处理方法。特别是基于模板匹配的关键部件检测和故障诊断具有弱鲁棒性,会造成很高的漏检率和误检率。考虑到深度学习在目标检测、图像分割等方面的成功应用,可以将相应的深度学习方法移植到列车关键部件故障诊断的应用中。当然,由于列车检修环境的复杂性和不确定性,如何提高深度学习在列车关键部件故障诊断上的泛化能力将是未来需要深入研究的问题。
2)基于三维立体图像的列车关键部件故障诊断研究。到目前为止,大多数利用图像进行故障诊断的技术都是基于二维图像,其所有的角度和视点都是固定的。相对于二维图像,利用3D相机获得的三维立体图像可以实现多视角的可视化,有利于对图像的全面分析和理解。因此利用3D检测技术实现列车图像的配准以及关键部件的故障检测也将是一个主要的发展趋势。
3)基于机器视觉的关键部件故障诊断方法只需要通过图像即可判断列车关键部件表面是否存在故障或是列车关键部件是否丢失。然而,对于列车关键部件内部是否存在故障,仅仅依靠图像无法完成判断,如转向架空气弹簧失效问题。因此,多种方法融合的故障诊断方式,如基于机器视觉和信号处理的列车关键部件故障诊断方式,将是未来的一个研究热点。
5 结 语
作为机器视觉领域中的应用研究热点之一,列车关键部件故障诊断主要包含两部分的内容,即图像配准和故障诊断。本文通过对这两部分技术研究成果以及3D检测技术研究成果的综述,分析比较了以往研究算法的特点、适用场景、国内外发展现状及优缺点,最后展望了列车关键部件故障诊断的发展趋势。目前,基于机器视觉的列车关键部件故障诊断的应用研究还处于初期阶段,还需要进一步地对相关问题进行深入挖掘、分析,并探究其解决方案,为我国各类型轨道交通安全运营保驾护航。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
舰船科学技术(2022年11期)2022-07-15
小猕猴智力画刊(2022年4期)2022-05-25
汽车实用技术(2022年9期)2022-05-20
速读·下旬(2021年11期)2021-10-12
云南画报(2021年4期)2021-07-22
大东方(2019年12期)2019-10-20
小猕猴智力画刊(2019年4期)2019-05-08
故事作文·高年级(2019年3期)2019-03-18
科学与财富(2017年22期)2017-09-10