
角运动感知模型发展与研究*
2022-01-26 08:23:42白俊林胡荣华
火力与指挥控制 2021年11期
罗 鹏,白俊林,胡荣华,舒 杨
(中国工程物理研究院总体工程研究所,四川 绵阳 621900)
0 引言
人体对运动的感知一直是学者们非常感兴趣的研究方向。航空航天飞行的出现及其对人体机体的新要求,更是加快了前庭研究的步伐。飞行模拟器是在利用地面运动平台提供给飞行员真实的飞行运动感受,尤其是六自由度Stewart 平台飞行模拟器[1-2]、动态飞行模拟器[3]以及定向障碍模拟器[4]等越来越得到各国战斗机飞行员训练机构的重视。然而追求线运动和角运动物理量上的完全一致在地面运动平台上是难以实现的,所以飞行模拟器的设计思路是使飞行模拟器上飞行员的运动感知和空中飞行时一致[5-7]。感知模型在飞行模拟器设计中的关系如图1 所示。因此,准确的运动感知模型对飞行模拟器的设计至关重要。
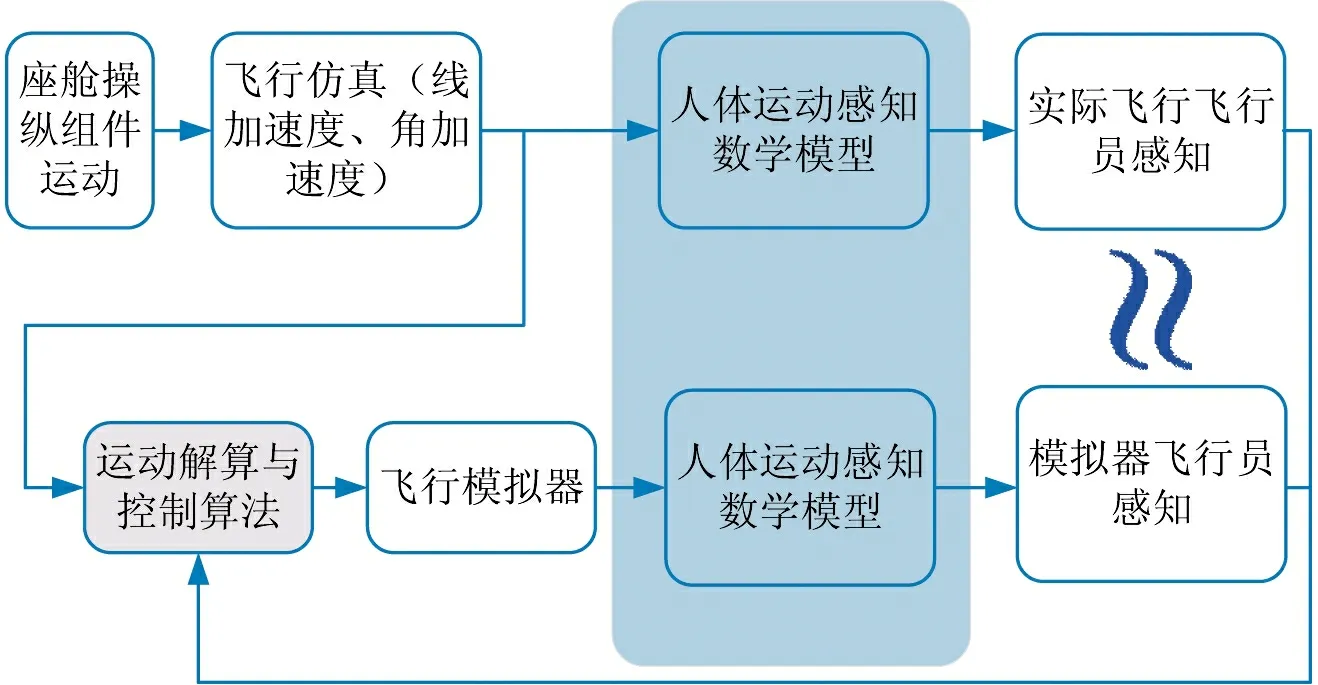
图1 人体感知觉模型在运动模拟器中的应用
国外许多国家在人体感知建模与研究方面起步较早,如荷兰、美国、德国、加拿大等,有比较丰富的感知模型建模经验。然而很多学者得到的感知模型结论却存在比较大的差异,这也显示了对感知模型建模以及对模型本身研究的必要性。Houshyar[8]对耳石的数学建模研究发展历程进行了总结,但针对更为复杂的角运动感知建模还没有较为详细的梳理与总结。本文旨在跟踪人体角运动感知数学建模领域的发展,学习和研究现有研究成果的建模经验和思路。
1 感知机理
前庭系统主要负责身体姿态的控制以及线性加速度和角加速度的感知。生理上,前庭系统位于内耳,由耳石和半规管构成,前庭系统的这些功能使其与惯性基准系统类似,前庭的结构如图2 所示[8]。

图2 前庭器官的结构图
半规管由左右两侧各3 个椭圆形的管道组成。管道中充满内淋巴,它含有多糖类粘性物质,因此,粘滞性比较大。
每个半规管的末端扩大形成壶腹帽。壶腹几乎填满了导管的横截面,并在椭圆囊处截止,如图3 所示。壶腹包含了壶腹帽,壶腹帽是一种凝胶状的分隔物,其密度与内淋巴相同。壶腹帽充满了整个壶腹的横截面,从而中断了通过导管、椭圆囊和壶腹的连续流体通道
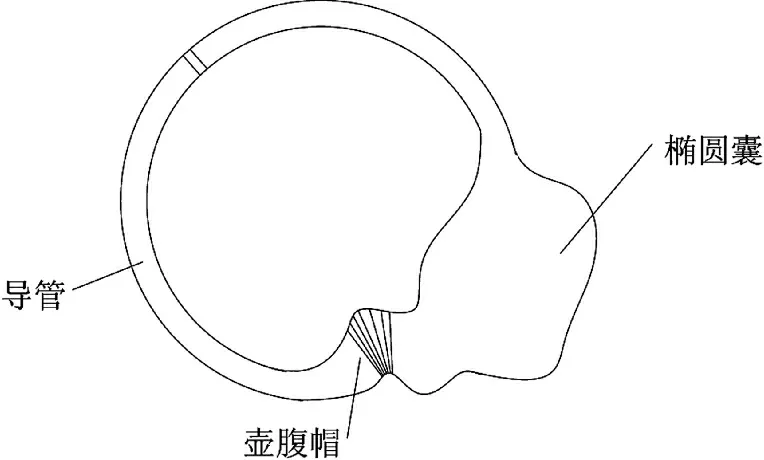
图3 半规管结构图
壶腹帽是运动感知的传感器,它的底部与神经组织相连。壶腹帽的机械偏转转化为电脉冲,电脉冲沿前庭神经向中枢神经系统传递角运动信号。
定性地说,半规管的工作方式为:头部的角加速度导致骨管和附着于其上的膜性结构以类似的方式加速。然而,内淋巴的惯性使它落后于头部的运动,产生一个通过壶腹帽的力,使壶腹帽转到与头部运动相反的方向。神经开始了向大脑发送角运动的电脉冲信号。
2 数学模型
姿态运动的感知器官由于结构相对复杂精细,因此,相对于过载运动感知,姿态运动感知较为复杂。因此,也一直是许多运动感知领域学者和科研机构的研究热点。
2.1 扭摆模型
2.1.1 试验分析
半规管的数学建模研究最早可以追溯到1931年德国科学家Steinhausen[9]提出的扭摆模型,他采用正向研究的方式,通过对半规管的力学结构和感知原理分析,提出半规管对角加速度的响应方式与二阶过阻尼的扭摆类似,并提出了数学模型。

对式(1)进行Laplace 变换,可以表示为:

式中,θ 表示壶腹帽的位移;α 表示在外力作用下的头部角加速度。
Steinhausen 提出的扭摆模型也得到各国学者的广泛认同,也是角运动感知数学模型的奠基性研究成果。此后许多学者针对半规管的研究也都是基于此模型开展的。
1948 年Egmond[10]通过旋转感知觉试验得到时间常数T1≈10 s,还测得半规管的自然频率fn=0.16 Hz。Egmond 主要进行了两个感知试验,为了避免受试者从环境中获得感知,试验是在黑暗的环境中进行。
第1 个试验以很小的角加速度(阈下)加速,达到需要的角速度时保持不变,突然停止,受试者会有转向的感觉。这种转向感觉的持续时间就是半规管系统对脉冲信号的响应时间,并可以以此对系统的时间特性进行分析。
第2 个试验是在有外力作用下进行的,因为准确地测量人体感知到的物理量是非常难的。因此,Egmond 采用了一种非常巧妙的方法:对人体输入振荡的正弦角加速度,输入是振荡的,那么人体的感知也应该是振荡的。如果在某一个时间点,通过原理(不考虑二阶系统的相位偏移)分析,半规管壶腹帽的偏移为零,也就是此时人体应该感知到静止(没有旋转运动),但是人体却在之后的另一个时间点感知到的静止。那么可以通过两个时间的差分析出当前振荡频率下人体感知模型的相位特性。
Egmond 通过试验对Steinhausen 扭摆模型进行进一步试验研究,是角运动感知的扭摆模型一大步发展,同时也验证了Steinhausen 扭摆模型的合理性。
随着对前庭系统的进一步研究,科学家们发现前庭系统不仅仅会引起人体的运动感知,还会与人体其他器官存在反射关系,例如前庭眼反射(VOR)、前庭脊髓反射、前庭自主神经反射等等[11-12]。其中最易于感知分析的就是前庭-眼反射。前庭-眼反射运动环境中,当头部位置突然改变时,前庭刺激引起反射性眼球运动,使眼球的位置在头部或身体发生改变时保持不变,以维持视网膜的成像稳定[13]。前庭眼反射分为旋转性前庭眼反射和直线性前庭眼反射[14]。例如人体受到恒角速度转动时,会出现眼球震颤。于是很多学者开始利用这一原理对角运动感知进行更为精确的量化试验,采用仪器测量的方式对角运动感知进行精确的测量。如图4 所示的眼震电图仪,通过电位的变化能精确测出眼震的幅度和频率。

图4 眼震电图仪
采用眼震电图仪的测量方法结果容易量化,且不易受到主观的干扰,因此,受到感知建模科学家们的青睐,成为角运动感知的主要测量方法。如JJ Groen[15-16]就通过眼震测量的方式测得长时间常数T1≈16 s。相比之下,短时间常数由于非常小,而一般的主观试验本身就存在误差,加上测量噪声,就很难得到较为精确的结果。
2.1.2 流体力学分析
1976 年,美国杜兰大学的Buskirk[17-19]从流体力学的角度对半规管的力学特性进行分析,因为人体角运动感知是半规管壶腹帽偏移导致的,而壶腹帽偏移是因为半规管产生运动时,内淋巴由于惯性和粘性与半规管产生相对运动,从而导致壶腹帽的偏移。所以Buskirk 重点对半规管的流体力学特性进行分析。建立内淋巴流体在导管内流动的Navier-Stokes 方程。

式中,v 为相对于惯性参考系的流体速度;ρ 为流体密度;p 表示压强;F 代表体积力;υ 是流体的运动粘度。
并依据半规管结构和内淋巴的流体物理参数对式(3)进行推导,并进行Laplace 变换,最终得到:

山东大学徐明瑜[20]也采用了类似的方法对半规管的流体力学问题进行了分析,得到和Buskirk近似的结论。1967 年,Steer[21]通过对半规管Navier-Stokes 方程的简化和分析,认为短时间常数是和内淋巴的密度成正比的。
通过对Buskirk 和徐明瑜的研究分析可以发现,流体力学的研究只到半规管这个角运动感知器官这一级,如下页图5 所示,后面的感知传递以及神经处理就很难通过流体力学分析来得到相关结论,只能用比例或者试验数据辨识的方式来近似处理得到人体角运动感知的数学模型。
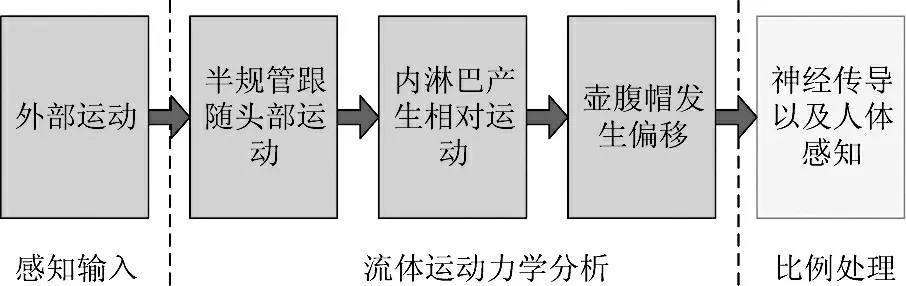
图5 流体力学分析流程
2.2 感知适应模型
LR Young[22-23]和CM Oman[22]两位学者通过对Egmond、Groen 等学者的研究分析后指出,运动感知系统是存在感知适应和感知习惯的。所谓感知适应就是感知系统对于持续刺激信号的感知灵敏度会随着时间而衰减,感知习惯是指感知系统对重复刺激信号的感知灵敏度对随着时间而衰减。Young 和Oman 对感知适应的模型进行了重点研究,指出感知适应存在于人体感知环节,在前庭眼回路中是不存在的,因此,通过眼震来进行试验记录无法到前庭的适应性模型。
为了描述前庭的适应性,在半规管扭摆模型的基础上添加了适应性函数(Adaptation Operator)Ha(s)。

适应模型与主管感知和眼震的关系如图6 所示。
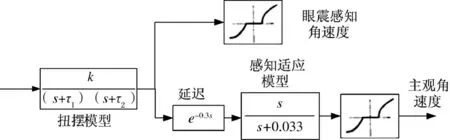
图6 垂直轴旋转的主观和眼震响应模型
因此,角运动感知模型的传递函数可以表示为:

同时,也可以发现主观感知通道在半规管的扭摆模型后会有0.3 s 的感知延迟,以及适应性模型。通过实验得到主观和眼震两种方式对角速度阶跃的响应曲线,如图7 所示。

图7 半规管模型的速度阶跃响应
Young 最后将感知模型表示为:

不同的是,式(6)表示的是输入角加速度与感知角速度之间的传递函数关系,而式(7)表示的是输入角速度与感知角速度之间的传递函数关系,从传递函数上也能分析出,二者关于模型传递函数的结构的结论是一致的。
对人体感知主要以系统输入和人体输出进行系统辨识,也有一些学者以动物试验来对半规管器官进行研究,通过测量传入神经放电频率来进行器官对角运动刺激信号的响应研究。
1976 年,美国芝加哥大学的Fernandez 和Goldberg 通过对以松鼠猴为对象进行角运动感知试验[24-26],以持续常值刺激和正弦刺激两种典型输入进行试验。分析试验结果发现,如果在感知模型上添加处理项,会使得试验结果与感知模型更好地匹配。有的学者把这理解为“神经处理项”。因此,传递函数改进为:

针对HL的意义,Fernandez 和Goldberg 并没有给出更好的解释,只是逆向分析模型,认为这样能更好地匹配试验结果,正如他们自己说的:“如果某个学者能够认定扭摆模型非常完整地描述了角加速度和壶腹帽偏移的关系,那么HL的意义应该就能推断出来。”。
Fernandez 也指出,他们的研究虽然是在松鼠猴上进行的,但是和人体前庭感知原理一样,式(8)表示的模型对于人体依然适用,只是模型参数上会存在差异。
1975 年Ormsby[27]在其博士论文中对人体感知觉进行了系统的研究,将角运动感知分成3 个部分,分别为:壶腹帽的机械运动模型、机械运动的神经放电率响应以及测量噪声,结构如下页图8 所示。
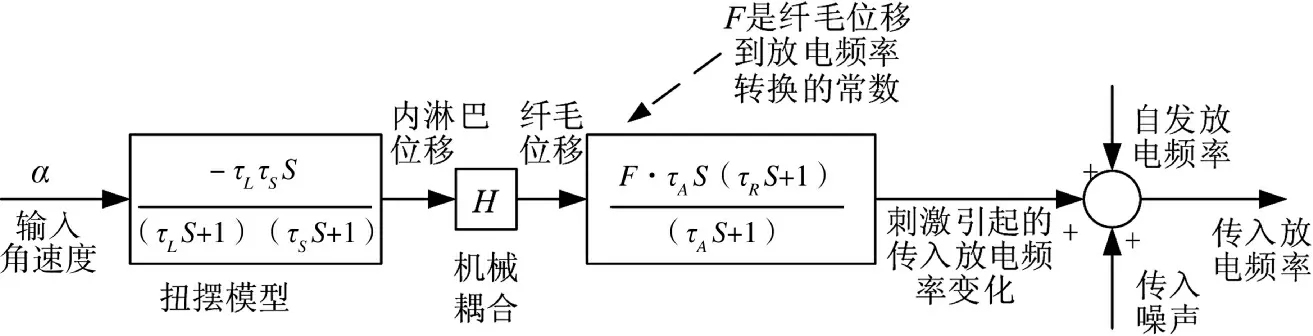
图8 Ormsby 角运动感知模型结构
采用线性动态系统表示半规管数学模型:
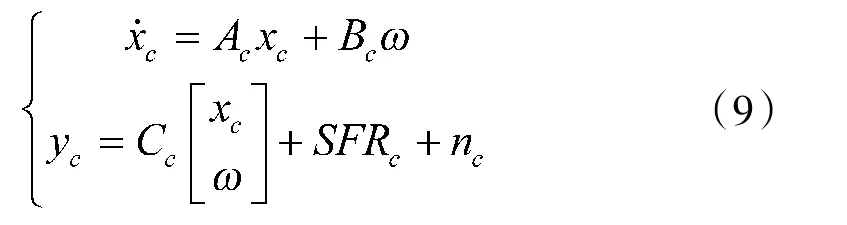
式中,SFRc为自发放电频率;nc为测量噪声;ω 为输入刺激信号;yc为半规管的传入响应;
自从学者们发现,可以通过人体感知的一致来“欺骗”飞行员认为物理量一致达到飞行模拟和训练的效果。感知模型的研究就一直活跃在各国的飞行模拟器设计领域,其中荷兰是最早开始基于运动感知一致飞行模拟器研究的国家之一。
1979 年,荷兰代夫特理工大学的Hosman[28]在对飞行环境下人体感知进行研究时发现,在飞行时,人体的头部和飞行动作的频率一般在0.1 Hz~10 Hz 之间。Young 和Oman 的提出了适应性函数类似于高通滤波器,式(8)中的时间常数Ta大约为80 s,代表着适应性函数可以过滤掉0.012 5 Hz 以下的输入信号,这对飞行动作是没有作用的,因此,飞行环境下可以不考虑适应性函数。所以角运动感知模型可以简化为:

式(10)中的时间常数2来源于Steinhausen 的扭摆模型,很多学者通过试验对其进行了理论分析和试验测量。其中前面提到的Buskirk 通过流体力学分析得到该时间常数约为0.007 6,Fernandez 通过试验测得为0.003。非常小的2代表分母上的2s+1 只在输入信号非常高频的时候才会有影响。因此,在飞行环境中,2s+1 项也可以不用考虑。经过简化,Hosman 最终提出在飞行模拟器使用的感知模型为:

这和Hosman 简化的线运动感知模型在结构上是一致的。由于有飞行环境作为简化基础,式(11)表示的感知模型也广泛应用于飞行模拟器设计与仿真[29]。
2.3 矢量感知模型
从现有的人体运动感知研究可以看出。角运动与线运动感知是没有耦合关系的,两者是否存在耦合关系也被人们忽略,因为在日常生活中,很难有持续过载环境下的持续旋转运动这样的场景。
随着对持续高过载飞行模拟器的研究,美国海军专家Crosbie 认为角运动和线运动感知之间是存在耦合关系的[30]。他在宾夕法尼亚州海军航空发展中心利用载人离心机开展了数百次人体运动感知试验,飞行员在完全黑暗的座舱中感受角运动,发现角运动感知的影响因素包含两个,即“角速度”引起的感知以及“线加速度”引起的感知。
“纯角速度”引起的角运动感知,即相对于飞行员来说,线加速度的大小和方向均保持不变,只有角度的转动产生的角运动感知;
“纯线加速度”引起的角运动感知,即相对于飞行员来说,没有角运动,只有线加速度方向改变产生的角运动感知。
图9(a)中描述的是由于线性加速度而产生的角运动感知,飞行员在座舱内保持不动,线性加速度进行旋转,那么飞行员将感知自身向反方向左进行了滚转运动。图9(b)描述的是因角加速度产生的角运动感知,飞行员在座舱内,线性加速度始终作用于飞行员头足方向,飞行员感知自身向右发生偏转。图9(c)是线运动和角运动共同作用下产生的角运动感知示意图,也是一般情况下飞行员感知角运动的情况。在过载环境下,飞行员因受角加速度作用,与飞机座舱同时向右进行滚转,飞行员感知自身向右发生滚转[31-32]。

图9 飞行员感知角运动的方式
这种耦合影响在高过载下飞行姿态变换动作时更加明显,因此,考虑感知模型之间的耦合关系,可有效提高持续载荷模拟器模拟效果。
滚转角运动感知模型为:

俯仰角运动感知模型为:

矢量感知模型相对于传统的运动感知模型有较大不同,相关研究还比较少,这是由于特殊环境下的特殊发现,缺乏普遍的研究条件。因此,正确性还有待进一步验证与研究。
3 运动感知建模研究的展望
现有的运动感知模型主要集中在单一因素的运动感知,在实际应用中有一定的局限性。未来运动感知建模还可以研究的主要方向有以下几点:
3.1 运动感知耦合关系研究
人体运动感知是非常复杂的多输入多输出系统。尽管视觉在人体运动感知中占据主要地位,但是当来自不同通道的感知信息出现冲突的时候,将会引起不适、眩晕甚至运动疾病。因此,多运动感受器的耦合关系将会是运动感知建模研究的主要方向。相关的耦合模型及多源信息融合机制将是运动感知建模的研究重点与难点。
3.2 模型的快速辨识研究
在实际工程应用中,运动感知模型并不是一尘不变的,会存在个体、训练情况、身体状态等因素引起的差异。成熟的感知模型体系应该具有较为固定的结构,但是模型的参数是动态变化的,当需要获得具体个体的感知模型时,有一套相应的辨识体系快速识别出当前实验对象的感知模型。因此,感知模型的快速辨识及其实验方法也有相当的应用前景。
4 结论
本文对人体角运动感知模型的研究进行了总结。从结果来看,感知建模的研究主要集中在国外,尤其是美国、荷兰、德国等。
运动感知模型不仅是飞行模拟器运动学解算算法的核心部分,而且在飞行错觉模拟、人机工程、运动相关疾病诊断与治疗等方面都有潜在的应用需求。人体运动感知数学模型的研究仍然大有可为。
猜你喜欢
基层中医药(2022年3期)2022-07-22 07:45:32
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
中老年保健(2021年4期)2021-08-22 07:08:50
中国耳鼻咽喉颅底外科杂志(2021年3期)2021-07-06 02:58:42
故事作文·高年级(2021年4期)2021-05-06 03:20:04
中华耳科学杂志(2021年2期)2021-04-25 03:56:08
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
中国医学影像技术(2018年10期)2018-11-06 10:11:14
人生与伴侣·共同关注(2018年7期)2018-07-26 02:22:56
医学研究杂志(2015年11期)2015-06-10 06:44:03
