
电子对抗条件下空战综合优势评估模型
2022-01-26 08:23黄岩毅陈国栋
火力与指挥控制 2021年11期
黄岩毅,陈国栋
(空军工程大学航空机务士官学校,河南 信阳 464000)
0 引言
传统的空战态势评估主要分为基于能力的空战威胁评估方法和基于态势的空战威胁评估方法[1]。现代空战是在信息系统支持下的具有复杂电磁对抗特征的体系作战,采用上述方法对空战进行威胁评估决策时还存在以下不足:一是分项指标选取没有很好地解决独立性的问题,如空战态势的调整会引起机载武器能力的改变,雷达、电子对抗设备的空战能力形成应对空战态势具有严格约束等;二是评估方法多采用固定权值或仅考虑某一特定态势中评估指标对空战态势的影响,忽略了空战是一个动态变化过程,在实际空战训练中无法有效运用,进攻、防御、干扰等不同空战阶段的机动决策应采取不同的评价系数;三是未能充分考虑电子对抗对空战态势和战机空战能力的双重影响。
为了解决上述问题,本文根据现代空战特点改进了传统基本战术动作库,建立了满足作战仿真需求的飞机运动模型,通过引入雷达与电子战装备模型、空空导弹火控计算模型,将火控雷达威力区、电子对抗干扰压制区和干扰条件下的空空导弹攻击区、允许脱离时间等要素有机结合,建立了电子对抗条件下的空战态势与空战能力协同的综合优势计算方法。该方法可为飞行员在空战训练中进行机动动作选择、协同攻击决策和对抗效果评估等提供依据。
1 空战机动决策模型
1.1 基本战术动作库与机动航线
空战机动动作库包含供空战决策选用的机动动作集合,是飞机空战机动决策的基础,典型的机动动作库设计方法如文献[2]所示,此外,还有一些基于任务需要设计的机动动作库等[3-4]。由于超视距空战不像近距格斗要求机动动作猛烈,一般的机动飞行即可满足相关战术要求。本文根据现代超视距空战仿真的需求,对上述机动动作进行增减分类和细化扩充,细化后的基本机动动作库包括前飞(减速、匀速、加速)、爬升、俯冲、左转弯、右转弯、90°机动、置尾机动、垂直机动、S 形机动、左盘旋、右盘旋、改平等。通过对上述基本机动动作模型进行规范化处理,建立一致的机动动作接口结构,如表1所示。通过该方法,可以将各种复杂战术动作转换成复杂战术航线,可以指定各基本航线的速度、转弯倾角、到达时间等,仿真时,飞行平台将以指定的速度、转弯倾角,沿着规划的航线,在指定时间到达指定航路点,实现复杂战术规划能力,以满足机动决策需求。
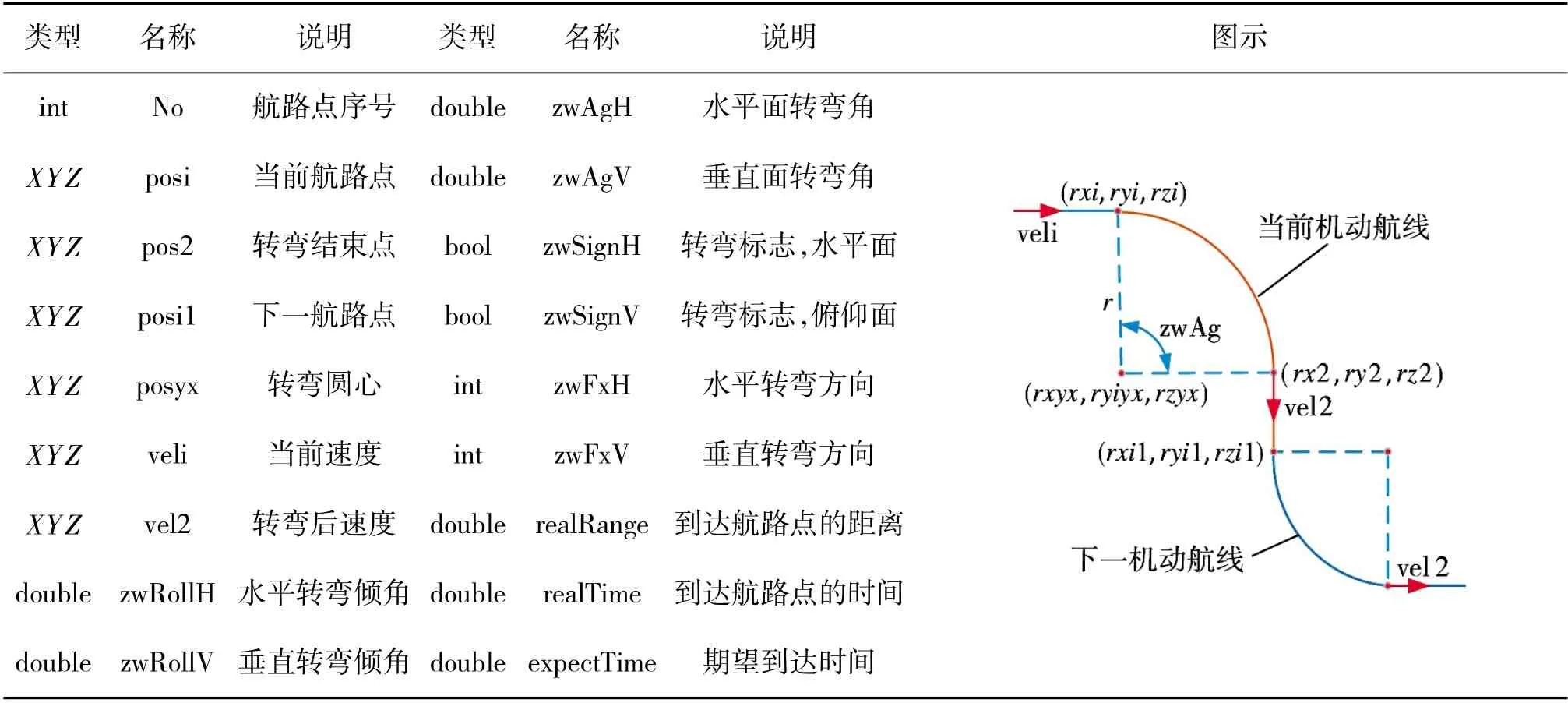
表1 基本战术动作描述数据结构
战机空战机动可分为进攻、防御和边攻边防3类[6],选择使用的基本战术动作时,其转弯方向、转弯角、高度、速度等参数根据与敌机的相对态势计算得出,以达成期望的空战态势;其次,由于雷达、电子对抗等作战装备均有一定的有效作用空域,机动战术参数也与参与的作战装备和空战目标相关,其机动动作应根据空战目标确保敌机在相应装备的有效作用空域内。
1.2 飞机运动模型及控制方法
空战中,飞机的作战过程可以看成是由一系列基本的机动动作构成[5-6]。飞行员在空中进行机动决策的过程就是进行最合理的机动动作选择的过程,通过对飞机操纵量的连续控制,对飞机的姿态、高度、速度等参数进行调整,以获得期望的空战优势。
飞机的质点动力学方程组为:
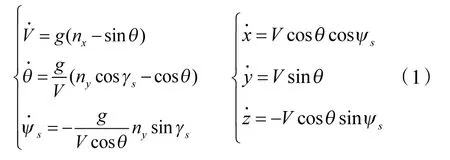
其中,nx、ny、γs分别是切向过载、法向过载和绕速度轴的滚转角,它们作为动力学模型的控制量,如果已知nx、ny、γs随时间的变化率和V、θ、的初值,即可求得V、θ、随时间变化的情况,进而根据式(1)可求得飞机在空间中的位置。因此,飞机运动控制的关键是机动指令即nx、ny、γs的设计。
为简化超视距空战中的飞机运动控制过程,提高作战推演效率,本文对飞机运动控制模型进行了如下约束:
1)飞机根据目标航路点相对于当前自身位置的相对关系来操纵飞机,如目标航路点在飞机左侧时,控制飞机向左偏航;反之,则向右偏航。
2)飞机机动控制采用PID 闭环控制方法,其控制量随着与航路点之间的偏差变化而变化,控制量是渐变的,不存在突变的情况,即机动指令的变化是连续的。
3)飞机在三维空间中的轨迹可近似地由若干段平面曲线串接而成,并认为在两个决策点之间飞机在一个平面内飞行,其速度矢量总在一个平面内变化。
4)在转弯结束时刻,基于航向对齐原则逐渐消除飞行中累计的飞行误差,包括位置、速度、航向等。
5)根据模拟飞机的实际性能对飞机运动模型及控制量进行边界控制,如最大过载、速度、高度、航程,最小过载、速度等。
本文通过将飞机机动动作转化为结构化的机动航线集合,进而将飞机的运动控制转化为控制飞机连续沿航线飞行,从而简化了空战过程中连续机动动作的选择及控制方法。本文采用基于驾驶员操纵特点的机动控制方法[5],根据飞机当前位置和航路点坐标的相对位置、角度及速度的关系,采用分段拟合逼近和一阶差分算法设计机动指令,该方法原理直观、易于实现、机动指令变化平缓、计算量小和计算精度高等特点,并且能够实时地展示飞机在飞行过程中的航迹姿态角等信息。
1.3 改进空战威胁评估方法
威胁评估是对敌杀伤能力及对我方威胁程度的评估,典型的空战威胁评估主要有基于能力的空战威胁评估方法、基于态势的空战威胁评估方法、基于事件的空战威胁评估方法等[1,7-9]。上述方法存在以下不足:一是仅研究空战态势或空战能力或将两者分开评估,未能分析空战态势和空战能力之间的相互影响,实际上,不同的空战态势,对机载设备能力,尤其是对空空导弹攻击区具有显著影响;二是假设目标信息完全已知或模型较为粗糙,未能将机载设备模型实时引入评估方法;三是未能充分研究电子对抗对空战威胁评估的影响。
本文根据超视距空战的特点,改进了传统空战威胁评估方法,通过引入雷达与电子战装备模型,空空导弹火控计算模型,将火控雷达威力区、自卫电子对抗干扰压制区和干扰环境下空空导弹攻击区、允许脱离时间等要素有机结合,建立了飞行机动与空战能力协同的综合优势计算方法,该方法可在电子干扰环境下根据空战态势实时计算空战能力,同时计算空战剩余能力以约束选择的空战机动动作,供飞行员进行机动决策。
1.3.1 空战态势
空战态势能有效反映出红蓝交战双方攻击位置或者防御机动等方面的优势或劣势。典型的态势评估方法是利用参量法或非参量法构建数学模型,用数值表示相应的优势[7-9]。空战态势优势主要由角度优势、距离优势、能量优势(包括高度优势和速度优势)组成,图1 显示了单机对单机的空战态势示意图,其中:

图1 单机对抗单机空战态势示意图
rji为双机目标线——敌机(蓝方)Bj到我机(红方)Ri的连线,φji为本机位置角——目标线rji与红机Ri速度Vi方向的夹角,qji为目标进入角——蓝机Bj速度Vj方向与目标线rji延长线的夹角。相对目标线右偏为上述两个角度的正方向,则0≤|qji|≤180°,0≤|φji|≤180°。
此处,距离优势依据在没有电子干扰的条件下机载雷达探测距离和空空导弹最大射程计算,其他态势优势指数使用文献[7]的计算方法建立空战态势评估模型,在此不再叙述。
1.3.2 综合距离优势
综合距离优势指数是指在电子对抗干扰环境下,根据火控雷达威力计算模型和空空导弹攻击区模型,实时计算的雷达最大探测距离和空空导弹最大射程后的得出综合优势指数。
如果雷达处于搜索状态,其空空导弹没有目标信息,最大射程记为0;如果雷达处于干扰条件下的跟踪状态,则空空导弹最大射程为根据干扰目标信息实时计算的值,其值可能存在较大的误差。
距离优势指数根据两机的导弹射程和雷达最大探测距离分情况讨论,式中,rji为敌我机之间的距离,rmi为我机最大射程,rmtj为敌机最大射程,rri为我机雷达最大跟踪距离,rrtj为敌机雷达最大跟踪距离。
首先考虑导弹射程,当双方导弹射程均小于rji时,双方处于均势,都没有对对手造成杀伤的能力。
当我机进入敌机射程,敌机未进入我机射程时,敌机处于最优态势,我机优势指数为0。
当rji大于双方任意导弹的射程时,考虑雷达探测距离,根据雷达探测距离设计的优势指数,与根据导弹射程设计的优势指数相比浮动范围较为保守,这是因为若双方距离已小于导弹射程,则可以直接发动进攻,对空战结果影响较大,而雷达探测到后由于距离的关系,无法直接发动进攻,对空战结果影响较小。
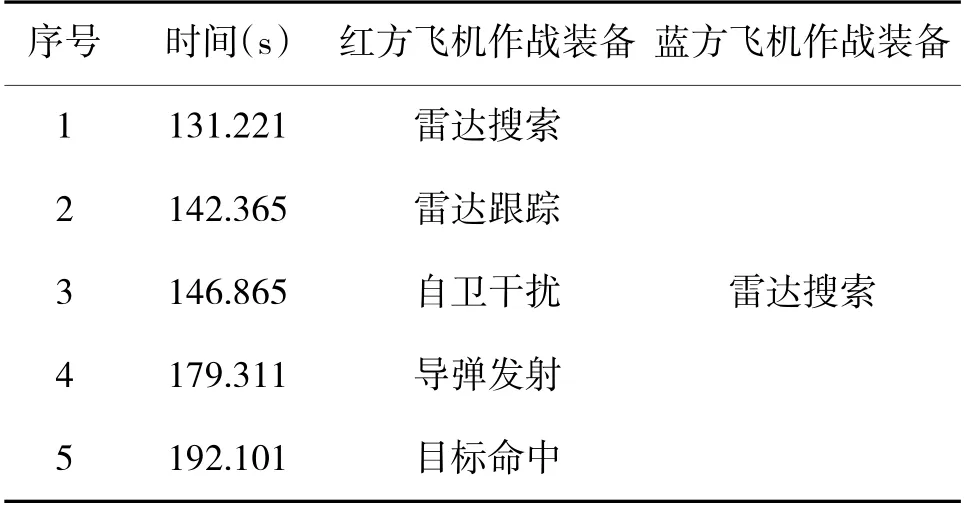
当雷达处于搜索模式时,rmi或rmtj=0;rri、rrtj为干扰后的雷达最大探测距离,且满足rmi 当雷达处于跟踪模式时,如果雷达被干扰,rri、rrtj为干扰后的雷达等效最大探测距离,rmi、rmtj为根据雷达输出目标计算的空空导弹最大射程,且满足rmi 1.3.3 电子对抗优势 电子对抗干扰效果主要可分为压制式干扰和欺骗式干扰。其中,压制式干扰效果表现为雷达等效最大探测距离的缩小,欺骗式干扰效果表现为雷达跟踪目标距离、角度和速度误差值的增大,间接表现为空空导弹最大攻击距离的误差。 设在干扰环境下,我机雷达对敌机的最大探测距离为Rri,我机对敌机的导弹最大射程为rmi;敌机雷达对我机的最大探测距离为Rrj,敌机对我机的导弹最大射程为rmtj。 则我机电子对抗能力优势指数可定义为: 1.3.4 机载武器优势 设我机对敌机的最大攻击距离为Riwmax,允许脱离时间为Tiw,敌机对我机的最大攻击距离为Rjwmax,允许脱离时间为Tjw,则我机武器优势指数定义为: 1.3.5 作战装备空域优势 雷达、指令制导、告警及有源干扰系统等作战装备存在有限的作用空域范围,当飞机机动时,可能由于飞机姿态的变化导致雷达、指令制导、告警或有源干扰系统失效。 设目标的方位角为aa,俯仰角为ap,雷达的最大方位测量范围为ara·max,最大俯仰测量范围为arp·max,则雷达空域指数定义为: pra用来度量目标偏离雷达探测中心的程度,pra越大,表示目标越靠近雷达天线轴线方向,pra越小,则表示目标越接近雷达探测区域边缘。 同理,可对指令制导、告警及有源干扰系统分别建立有效作用区域指数,作为判断飞机机动对相关作战装备能力的影响。 1.3.6 综合优势 采取线性加权法建立空战综合优势指数模型为: 式中,Rs为态势优势,Prij为综合距离优势,Peij为电子对抗优势,Pwij为机载武器优势,Pai为相关作战装备空域指数的最小值。 由于进攻、防御或边攻边防时,其不同阶段参与的作战装备和空战目的是不同的,因此,本文根据空战目的使用动态变权重的加权系数建立空战综合优势模型[9]。该方法综合考虑了电子对抗环境下的敌我双方态势及空战能力对比,能够更加全面、客观地反映空战的真实情况,为空战机动决策提供依据。 为验证电子对抗环境下的空战综合优势决策模型的可行性,本文采用航空电子对抗作战推演系统[10]制定了一对一迎头空战对抗场景,如图2 所示。其中,红蓝方飞机初始相距120 km,迎头态势,其飞行及雷达、电子对抗、机载武器状态如表1 所示。蓝方飞机直线飞行,红方飞机采取了防御机动措施,使用了左盘旋、90°机动和右转弯的组合战术动作,各机动动作参数如表1 所示。 图2 电子对抗环境下一对一空战想定示例 推演开始后,系统以初始态势为仿真0 时刻,采用固定仿真步长为10 ms,16 倍速的速率进行仿真计算,红方飞机运动模型沿着预设航线,以指定的速度、姿态和转弯角、转弯倾角,按照指定的时间到达指定的航路点。 表2 初始空战态势 表3 初始飞行对抗参数 推演时,红方飞机的电子对抗设备全程自动侦察和干扰,火控雷达在左盘旋结束时开机,在预设空域自动搜索、截获目标并进入STT 模式,机载火控计算程序根据飞机状体、雷达目标数据连续计算最大发射距离,并在满足发射条件后模拟发射按压按钮自动发射导弹。蓝方飞机在未实施电子对抗干扰的情况下,因受到红方飞机电子干扰,其雷达全程处于搜索状态,未能有效发现目标,双方作战装备动作流程如下页表4 所示。 表4 双方飞机作战装备动作流程 在图2 所示的一对一空战态势下,各红方飞机和蓝方飞机的分项空战优势如下页图3 所示。图3(a)显示了红方飞机在左盘旋转弯后雷达转入跟踪状态,双方空空导弹最大发射距离对比,其竖直虚线表示红方飞机空空导弹发射时刻;图3(b)显示了红方和蓝方飞机在发射导弹后需要继续制导的时间对比,在该时间内,双方导弹发射后需要雷达继续跟踪目标,直至空空导弹进入末制导阶段;图3(c)显示了红方飞机雷达跟踪的目标相对方位和俯仰角度,该角度直接影响雷达的有效探测空域和电子对抗的有效告警干扰空域;图3(d)显示了红方飞机雷达跟踪的目标相对速度对比,该图同时显示了红方飞机雷达的高度杂波区和主瓣杂波区,如果目标相对速度进入该区域,则雷达可能转入记忆状态,导致探测误差增大;图3(e)显示了红蓝双方在距离、速度、高度、角度等空战态势优势和机载武器、雷达、电抗等空战能力优势上的对比;图3(f)显示了当前时刻红方飞机的优势指数,当本机实施干扰时,可有效等效提高雷达探测距离的优势指数,同时,电子对抗空域指数提示飞行员目标处于本机电子对抗告警和干扰空域中心的偏离度,以保证飞行机动和干扰有效实施的协同。 图3 空战优势对比 如何在瞬息万变的空战态势中,合理高效地使用机载雷达、电子对抗和武器等设备,及时准确地进行空战机动决策,充分发挥战机空战效能,是现代空战决策中的关键问题之一。本文针对空战中飞行机动与电子对抗之间的协同攻击决策问题,通过建立符合空战仿真需求的超视距基本战术动作库和运动模型,引入雷达与电子战装备模型、空空导弹火控计算模型,将机载火控雷达威力区、电子对抗干扰压制区和干扰条件下的空空导弹攻击区、允许脱离时间等要素有机结合,建立了电子干扰条件下空战态势与空战能力协同的综合优势评估方法。作战推演结果表明,建立的空战综合优势评估方法较全面合理地反映了现代空战的实际情况,能够满足现代空战机动决策需求。



2 作战推演分析
2.1 作战想定



2.2 对抗结果
2.3 结果分析

3 结论
猜你喜欢
文史春秋(2022年4期)2022-06-16小哥白尼(军事科学)(2022年1期)2022-04-26考试与评价·高二版(2021年1期)2021-09-10当代陕西(2019年12期)2019-07-12汉语世界(The World of Chinese)(2019年1期)2019-03-18科技视界(2016年23期)2016-11-04连环画报(2015年12期)2016-01-14现代电子技术(2015年17期)2015-09-23
