
一种基于规则的敌我识别流程优化设计
2022-01-26 08:48:46曹志敏蒋充剑
火力与指挥控制 2021年12期
曹志敏,蒋充剑
(江苏自动化研究所,江苏 连云港 222061)
0 引言
随着现代远程精确打击和高超声速武器装备的发展,对作战区域内目标的综合识别成为各国强烈的军事需求。如何在复杂的战场环境下实现精确打击、避免误伤,快速、可靠地进行敌我识别显得尤为重要。传统的协作式敌我识别器(IFF),通过询问应答进行敌我识别,虽然具有直接快速的优点,但是需要目标的配合,并且易受电子干扰、伪装欺骗等影响,导致敌我识别的可靠性降低,甚至在某些特定的战场环境下无法使用。因此,出现了基于多传感器信息融合的非协作式目标识别技术[2],其优势在于扩展了敌我识别系统的空域、频域和时域的范围,不需要目标的配合,仅靠目标信息实现目标敌我识别。但由于传感器探测精度的影响,基于多传感器信息融合综合识别仍然存在不确定性。为充分发挥两种敌我识别方式的优势,避免单一敌我识别方式的弊端,发展了协作式与非协作式综合敌我识别技术。其优势在于除了利用敌我识别器询问应答信息外,还综合利用目标运动等特征信息进行敌我识别,可有效提高目标敌我识别的准确性和可靠性。目前,目标综合敌我识别技术相关理论研究成果不少[3-7],在工程上也有一定的应用,但是,由于战场环境的复杂性,敌对目标的对抗性,使得实际敌我识别过程中常常出现系统自身识别结果前后不一致、多平台协同识别结果不一致等情况,给态势评估和指挥决策带来较大的影响,目前敌我识别系统对此种情况鲜有较好地处理。
本文分析了系统敌我识别工程应用中可能存在的相关问题,优化设计敌我识别流程,既发挥机器的快速计算优势,又发挥人的认知推理优势,在获得敌我识别快速性的同时提高可靠性,为敌我识别系统工程设计提供参考。
1 基于规则的敌我识别一般流程
敌我识别流程一般是预先设计好一组目标识别规则,将多传感器获取的目标信息进行融合处理后,将目标特征信息依次与识别规则进行匹配,匹配成功后给出目标敌我属性结果,一般流程如图1 所示。
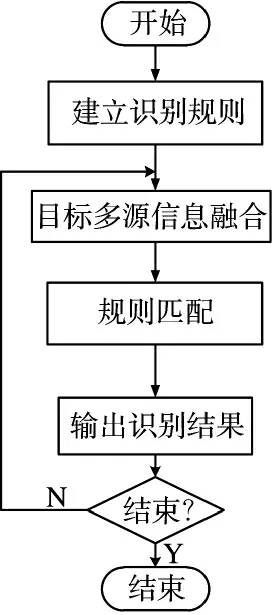
图1 目标敌我识别一般流程
1)建立识别规则
系统敌我识别的可靠性很大程度上依赖于识别规则优劣。识别规则主要是根据相关的战术以及通用交战规则进行构建,形成一套识别规则集合。识别规则一般包括识别规则主体和适应范围。
识别规则主体一般采用IF-THEN 结构,其中条件可以是简单条件,如“速度大于××kn”,也可以是由简单条件组合的复杂条件,如(速度大于××kn)AND(高度小于××m)等。识别规则将符合一定条件的目标指定为敌、友、中立、可疑等某个属性。例如,IF(高度〈××m)AND(速度×kn)THEN 目标属性=可疑。将若干条识别规则按定先后顺序(这个顺序要根据战场情况和经验确定)排列,构成一个有序的识别规则集合。
识别区域设置目的是限制识别规则适应的空间范围。一般包括国家区域、航线区域等。其中国家区域包括领海,可由地理信息系统自动提供;航线区域包括空中航线和海上航线,由航向和宽度确定,用于根据目标相对于航线的位置和航向对目标进行识别。如果1 条识别规则无区域限制时,则表示适应全球范围。
2)匹配规则
基于识别规则进行目标敌我识别,是将目标位置、速度、航向等运动学参数、IFF 信息、航线等多源信息,按照识别规则的排列顺序进行逐句匹配的过程。一旦目标特征与某条识别规则匹配成功,则停止匹配,给出识别结果。如果直到最后一条识别规则均未实现匹配,则输出“待定”结果。
2 系统自动识别存在的问题
在系统目标识别实际应用过程中,往往会出现两种情况。第1 种是识别结果前后不一致。即系统对目标进行敌我识别结果前后发生变化。例如,在t时刻系统识别目标A 为“敌”,识别目标B 为“中立”,在t+1 时刻识别目标A 为“友”,识别目标B 为“可疑”等。其主要原因在于各个传感器所提供的信息往往不完整且具有某种程度的不确定性,识别规则也存在一定的模糊性,导致基于规则的多传感器信息融合识别结果存在一定的不确定性,形成系统识别结果出现变化的现象。第2 种是识别结果内外不一致。即系统自动识别结果与人工识别结果或者编队外部平台识别结果不一致。例如,系统识别目标A 为“敌”,人工或者外部平台识别为“友”,系统识别目标B 为“友”,人工或者外部平台识别为目标B“敌”等。其主要原因在于不同平台所处的战场环境和感知的战场态势有所差异,识别人员认知与机器推理结果存在差异等,形成系统识别结果内外不一致的现象。
出现上述两类不一致情况时,都会对作战决策产生重要影响。例如,当识别目标敌我属性由“中立”变为“敌”时,可能需要将“监视”决策迅速改变为“攻击”或“防御”决策等。因此,在系统敌我识别流程中,必须对上述两种情况进行及时有效的处理。
3 敌我识别流程优化设计
针对上述系统自动识别可能存在的问题,对敌我识别一般流程进行优化,主要思路是在系统自动敌我识别流程中,增加前后不一致、内外不一致两种情况的监测告警环节,系统一旦监测到任意一种不一致情况出现,能够及时给出告警提示,引入识别操作员的认知推理能力,利用其专业技能和综合分析判断能力,人机相辅进行敌我识别,有效解决单纯依靠系统自动识别的不足,减少误判,提高目标敌我识别的可靠性。优化流程如下页图2 所示。
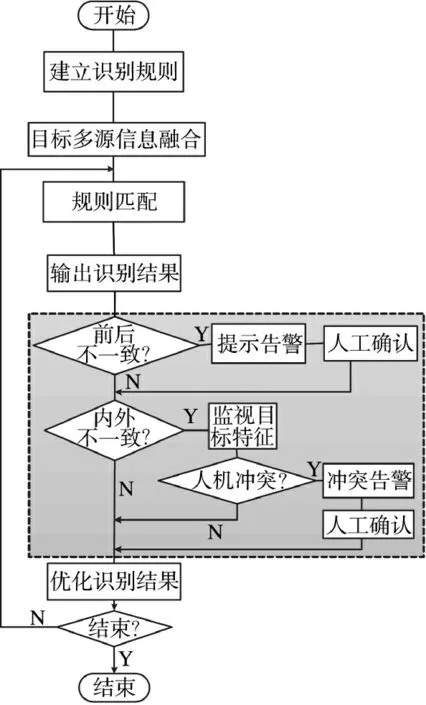
图2 基于规则的敌我识别流程优化示意图
4 告警规则设计
在复杂战场大量目标情况下,识别操作员难以对所有目标所有属性变化都能给予及时关注,而只需要对某些重要变化情况进行重点关注。根据具体战场态势设计合理的监测告警规则成为关键。
4.1 前后不一致告警规则设计
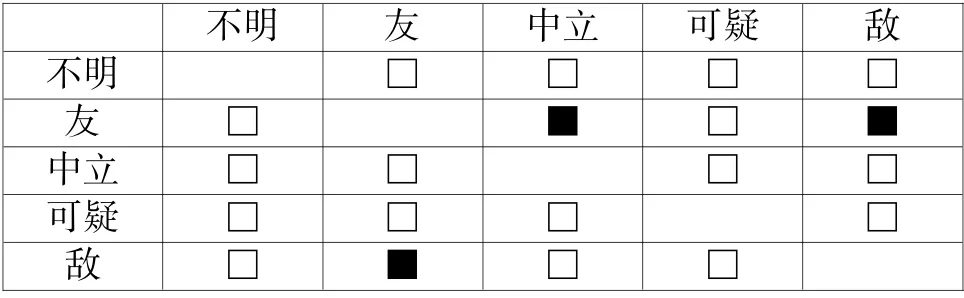
按照影响决策程度大小可以将识别结果前后不一致情况分为两个层次。第1 层为严重不一致,即出现“敌”变为“友”、或者“友”变为“敌”,此时必须无条件给出告警;第2 层为一般不一致,即除严重不一致情况外的其他情况,例如,某目标属性由“不明”变为“中立”对决策的影响并不十分严重,属于一般不一致。哪些情况需要给出告警,可以由识别操作员根据战场具体环境和战场态势,灵活定义告警条件,有选择性地监控目标敌我属性变化。
定义选择性监视目标属性变化的方法可以采用下面的简便方法,如图3 所示,即采用矩阵形式对话框。第1 列为前一周期识别的目标属性,右面诸列为后一周期变化了的目标属性,中间区域为相应的按钮,当按钮按下时(黑色状态),表示出现此种属性变化时给出告警,其他情况(白色状态)表示不告警。当按钮全部按下,表示出现任何变化情况时均给出告警。
4.2 内外不一致告警规则设计
系统敌我识别时一般允许人工干预,允许识别操作员对系统识别结果进行修改,通常情况下,考虑专业识别人员的综合判断能力,这种修改具有较高的可信性。但是,人终究存在误判的可能,另一方面,随着敌我识别技术的不断发展,机器识别的可信性也不断提高,因此,当人机识别出现显著差异甚至敌我相反情况时,必须及时告警。再者,当编队或者战术群多平台协同作战时,对目标进行协同识别,当各平台识别结果信息共享时,也会出现平台之间识别结果不一致的情况,特别是识别结果出现敌我相反情况时,也必须及时告警。
从系统识别与人工或外部平台识别结果的冲突程度区分,至少需要设计以下两种告警规则:
不明友中立不明□□可疑□友□■□■中立□□□□可疑□□□敌□■□敌□□□
规则1
(系统识别为“友”或者“中立”)&
(人工识别为“敌”或者“可疑”)&
(敌我识别应答为有效)。
规则2
(系统识别为“敌”或者“可疑”)&
(人工识别为“友”或者“中立”)&
((速度增加超过××豫)&(航路捷径小于××km))或者((高度大于××m)&(航路捷径小于××km))。
其中速度增加量、航路捷径数值、高度数值均可以根据具体情况由识别操作员合理设置。
5 结论
本文针对敌我识别工程应用中可能出现的目标敌我识别两种不一致的情况,对敌我识别流程进行了优化设计,增加了两类监测告警环节,给出了两类告警规则设计方法,在系统敌我识别出现异常情况时,最终交由人进行处理,充分发挥人机敌我识别的各自优势,提高敌我识别的可靠性。随着人工智能技术的快速发展,可以引入深度强化学习等智能技术,构建智能敌我识别模型,综合目标运动学参数、航路捷径、图像、电磁、敌我识别器(IFF)、空间区域、航线等广泛信息进行自动识别,同时重视人的认知推理能力,细化对机器敌我识别的监视,人机相辅进行目标识别,使目标敌我识别更快速、更可靠。
猜你喜欢
轻兵器(2022年10期)2022-10-22 03:05:26
小猕猴智力画刊(2022年3期)2022-03-29 01:09:42
今日农业(2021年10期)2021-07-28 06:28:12
数学小灵通(1-2年级)(2021年4期)2021-06-09 06:26:14
劳动保护(2018年5期)2018-06-05 02:12:10
Coco薇(2017年11期)2018-01-03 20:59:57
暨南学报(哲学社会科学版)(2016年9期)2017-01-15 13:52:02
国际医学放射学杂志(2016年4期)2016-08-22 10:56:54
办公自动化(2016年18期)2016-08-20 12:50:24
现代兵器(2016年6期)2016-06-25 16:20:24
