
空中搜救行动锥体空间管控方法*
2022-01-26 08:49:30闫静茹苏英振
火力与指挥控制 2021年12期
闫静茹,苏英振
(空军指挥学院,北京 100097)
0 引言
自马航失联事件以来,空中搜救行动愈发受到世界各国重视,它不仅事关人员生命安全,而且影响国家形象和军队声誉,近些年,随着空中搜救行动地位作用不断提升,国内外逐步涌现出部分有关空中搜救行动的理论研究成果。就其本质而言,空中搜救行动是以搜救目标位置为中心,根据相关信息计算得出的有限空间内,所实施的一种特定作战行动。参与行动的各型空中搜救力量根据性能任务不同,分别部署于不同高度层,于同一空间内协调有序、相互配合,共同形成搜救力量优势。由此来看,为达成最佳搜救力量效能,空间管控必然成为空中搜救行动重点。
关于空中搜救行动空间管控问题,目前相关研究成果较少,比较典型的是本文作者苏英振教授与其学生张博共同于文献[1]中提出的“空中搜救锥”概念。该概念形象生动地描述了空中搜救行动特点规律、兵力分布和实施条件,尤其是创新性揭示出空中搜救行动锥体空间特性。而之后,文献[2]中,再次对“空中搜救锥”的提出根据、构建方法和运用要点展开系统论述,具体观点与文献[1]一致。应当说,“空中搜救锥”作为一种作战概念,既描述了一种作战思想,同时描述了一种作战空间。基于此,决定以“空中搜救锥”概念为支撑,重点挖掘空中搜救锥“空间”属性,通过建模与分析,试图在空中搜救行动空间管控方面有所突破与发现,以此推动空中搜救行动空间管控问题得以有效解决。
1 建立“锥体空间”模型
“空中搜救锥”概念指出,空中搜救行动本质上为体系支撑下的点行动,此理论旨在强调空中搜救行动应以搜救目标为核心,锥内各层行动均以有利于下层为原则,最终优先服务于搜救目标救援工作,由此产生的锥形物理空间,同样聚焦于搜救目标所在位置点。但实际上,这种锥形空间更适合于描述空中搜救行动悬停吊救阶段,并非适用于空中搜救行动全过程。对此,决定区分空中搜救行动阶段,建立不同模式下锥体空间模型。
1.1 搜索模式
搜索模式,主要用于搜索发现阶段,且尚未受到敌方阻射拦截。此时,预警机、电子侦察机位于最高层侦察探测敌情,制空战斗机及其他压制、掩护力量分别保持于较高位置实施警戒巡逻,且武装直升机伴随搜救直升机飞行,与搜救直升机配置于相同高度。由此,建立空中搜救行动搜索模式锥体空间模型,如图1 所示。模型以空间盒为参考基准,同时考虑时间对空中搜救行动的重要影响,将时间作为另一水平坐标横轴附加于空间盒之上,从而构建以空间盒为基础,同时兼顾高度、时间,且能够覆盖全球区域位置,具有时空属性的空中搜救行动空间坐标体系。设定搜救直升机以扇形搜索方式,于预定搜救区域上空实施搜索发现,搜索半径为R1,O点为搜救起始点,A 点为搜救目标最后已知位置点,A'点(E2,S2,0,t)为t 时刻预定搜救目标位置,预定搜救区域为以A'点为圆心,R1为半径的圆形区域S,锥体空间内采取高度协调线管控规则,共设置两个缓冲区,分别为S1和S2,各高度层力量分布情况如图1 所示。搜救空间V 可表示为由C 点(E2,S2,HC,t)为圆心、R1为半径的底部区域S',B 点(E2,S2,HB,t)为圆心、R2为半径的顶部区域S'',以及高度HBC所构成的锥体空间。其中,R2为预警机或电子侦察机在顶部区域S''内的最大飞行半径。由图1 可知,搜救空间V 的底部区域S',实际上可看作搜救区域S 投射于空中的圆形区域,由此,搜救空间V的空间容量可表示为:

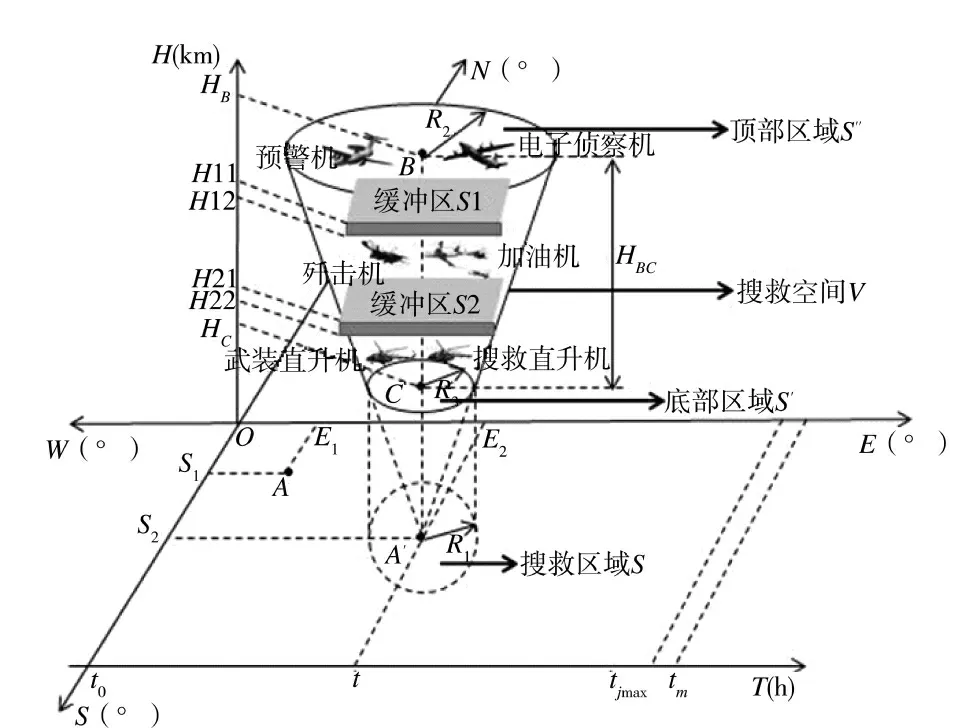
图1 搜索模式锥体空间模型
1.2 作战模式
作战模式,主要在搜救行动受到敌方阻射拦截时使用。此时,预警机、电子侦察机位于最高层侦察探测敌情,制空战斗机等其他压制、掩护力量通常以高制低,从高空消灭或阻击敌空中力量,同时压制敌防空火力,而此时武装直升机则需要低于搜救直升机飞行,掩护搜救直升机安全,并先期肃清敌地对空火力。以上述搜索模式为基础,搜救原始条件不变,建立空中搜救行动作战模式锥体空间模型,如下页图2 所示。设定我方在搜索发现阶段突遭敌航空火力袭击,于是启动作战模式。为保障搜救直升机安全,确保武装直升机顺利实施对地打击,决定在搜救直升机与武装直升机之间设置缓冲区S3,由此,搜救空间内共设置3 个缓冲区,分别为S1、S2和S3。搜救空间V 可表示为由C 点(E2,S2,HC,t)为圆心、R3为半径的武装直升机作用区域S',B 点(E2,S2,HB,t)为圆心、R2为半径的顶部区域S'',以及高度HBC所构成的锥体空间。其中,R3为武装直升机作战半径。由此,搜救空间V 的空间容量可表示为:

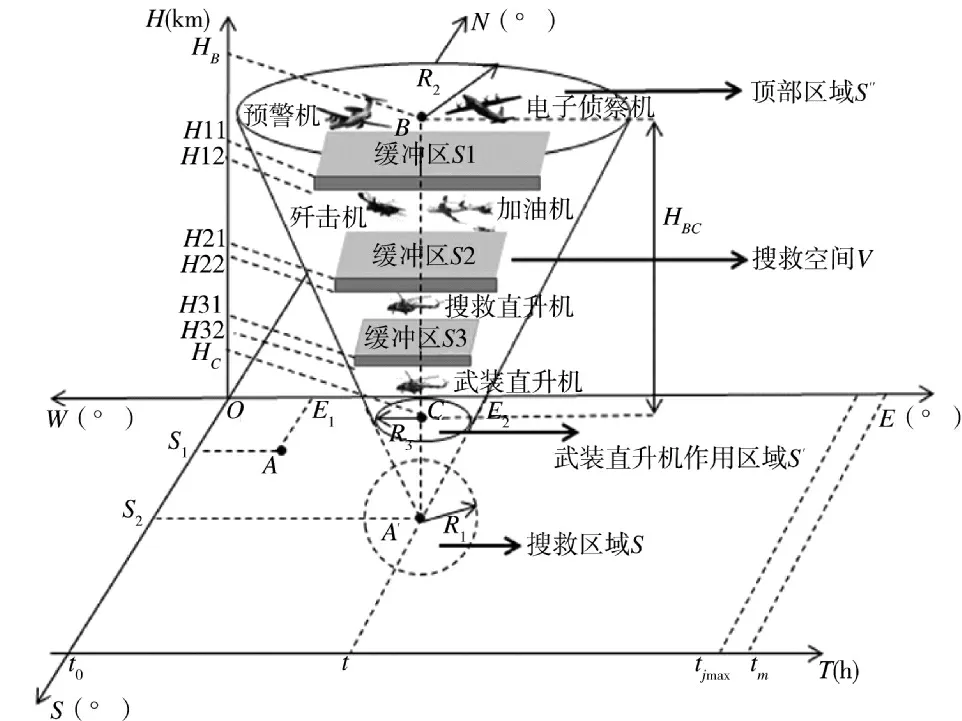
图2 作战模式锥体空间模型
1.3 救援模式
救援模式,主要用于悬停吊救阶段。此时,预警机、电子侦察机位于最高层侦察探测敌情,制空战斗机等压制、掩护力量保持较高高度实施警戒巡逻,武装直升机与搜救直升机位于同一高度层,负责掩护搜救直升机行动,且稍高于搜救直升机,搜救直升机位于较低高度对搜救目标实施悬停吊救。由此,保持搜救原始条件不变,建立空中搜救行动救援模式椎体空间模型,如图3 所示。搜救空间内共设置两个缓冲区,分别为S1和S2。搜救空间V 可看作以B(E2,S2,HB,t)为圆心、R2为半径的底部区域S',以及高度HB所构成的完整锥体空间。由此,搜救空间V 的空间容量可表示为:

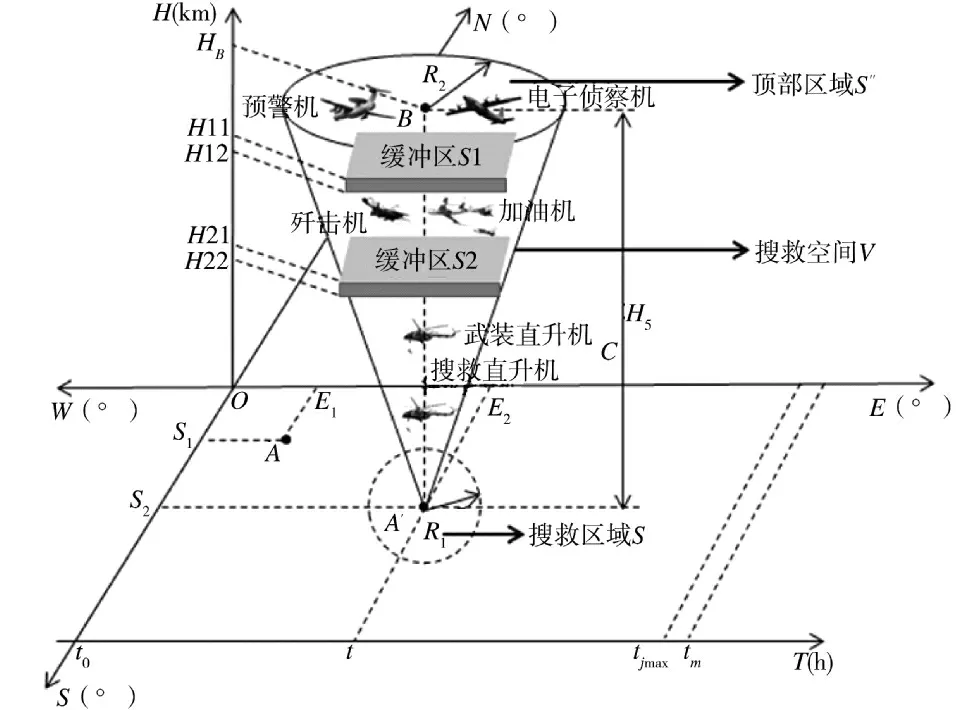
图3 救援模式锥体空间模型
2 “锥体空间”模型在空间管控方面的应用
建立空中搜救行动锥体空间模型后,便可以模型为依托,将空中搜救行动空间管控问题融入模型当中,通过研究“锥体空间”管控模型、“锥体空间”动态管控,以及“锥体空间”管控方法,对空中搜救行动空间管控问题作进一步探讨与分析。
2.1 “锥体空间”管控模型
空中搜救行动空间管控目的,在于保证完成空中搜救行动任务前提下,通过调整力量部署,优化空间结构,减少由于空间配置造成的各型搜救力量间矛盾冲突,促使搜救力量整体效能达到最优化。由此得出,搜救效能、搜救安全和搜救经济性可作为评价搜救空间管控的3 个重要方面。
搜救效能,即在特定搜救空间内,通过对各型力量进行有效配置,同时对高度和火力范围作出协同规定,促使各型力量所能达到的最大整体搜救效能。包括搜索效能、救援效能和防护效能。
搜救安全,即搜救力量整体安全,包括自身装备性能安全、各型力量飞行安全,以及搜救行动整体安全。搜救安全是确保搜救行动顺利实施的重要前提,而搜救空间内高度层划分、力量配置的前后高低顺序,均将在一定程度上影响搜救安全。
搜救经济性,即在搜救行动中,通过合理分配空间资源,坚持以空间容量为基准,对各型力量数量规模、配置高度和飞行航线作出合理规定,以有效减免因各型力量误击误撞而造成的自我耗损。在保证高效完成搜救任务前提下,应以最低力量成本和最优化空间配置,全面实现和提高搜救行动经济性。
通过上述分析,决定以搜救效能、搜救安全、搜救经济性为指标,对空中搜救行动空间管控效能进行评价分析。由于三者之间并非完全独立,此处将利用积性效用函数,在空间管控与搜救效能、搜救安全、搜救经济性之间建立数学关系。分别将搜救效能、搜救安全、搜救经济性设定为P、S、E,搜救空间管控评价函数可表示为:
随后,需要根据我方有无夺取制空权,区分两种情况对搜救效能P 进行讨论。
2.1.1 未完全夺取制空权
未完全夺取制空权情况下,必须重点考虑敌情威胁,搜救过程中仍需预警机位于高空实施大范围侦察探测,制空战斗机在大范围内进行警戒巡逻,由此形成上宽下窄的反向锥体空间。此时,采取一般力量配置模式,即“2+X+Y+1”模式,2 架搜救直升机,X 架武装直升机,Y 架制空战斗机,1 架预警机。其中,武装直升机与制空战斗机的数量视战场情况和敌情威胁程度而定,如图4 所示。设定此时处于搜索模式,搜救行动原始条件保持不变。为保证各高度层力量有序实施对敌打击,搜救空间内共设置S1、S2两个缓冲区。
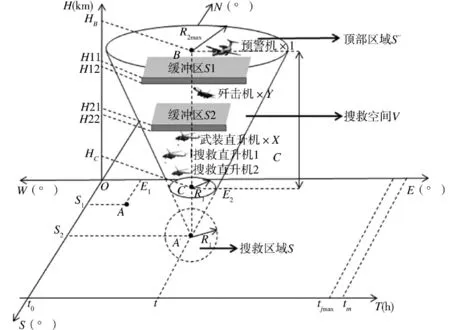
图4 “2+x+y+1”力量模式锥体空间模型
由图4 可知,搜救空间容量为:
2.1.2 已夺取制空权
已夺取制空权情况下,虽然搜救区域不变,但由于所面对敌情威胁较小,空中视野开阔,预警机可位于较小范围内实施侦察探测,由此形成上窄下宽的正向锥体空间。且无需派遣制空战斗机等压制、掩护力量,可采取简化的力量配置模式,即“2+1”模式,2架搜救直升机和1 架预警机。其中,1 架搜救直升机负责悬停吊救,另一架负责武装警戒,如图5 所示。设定此时处于搜索模式,搜救行动原始条件保持不变,且搜救空间内仅设置一个缓冲区S1。
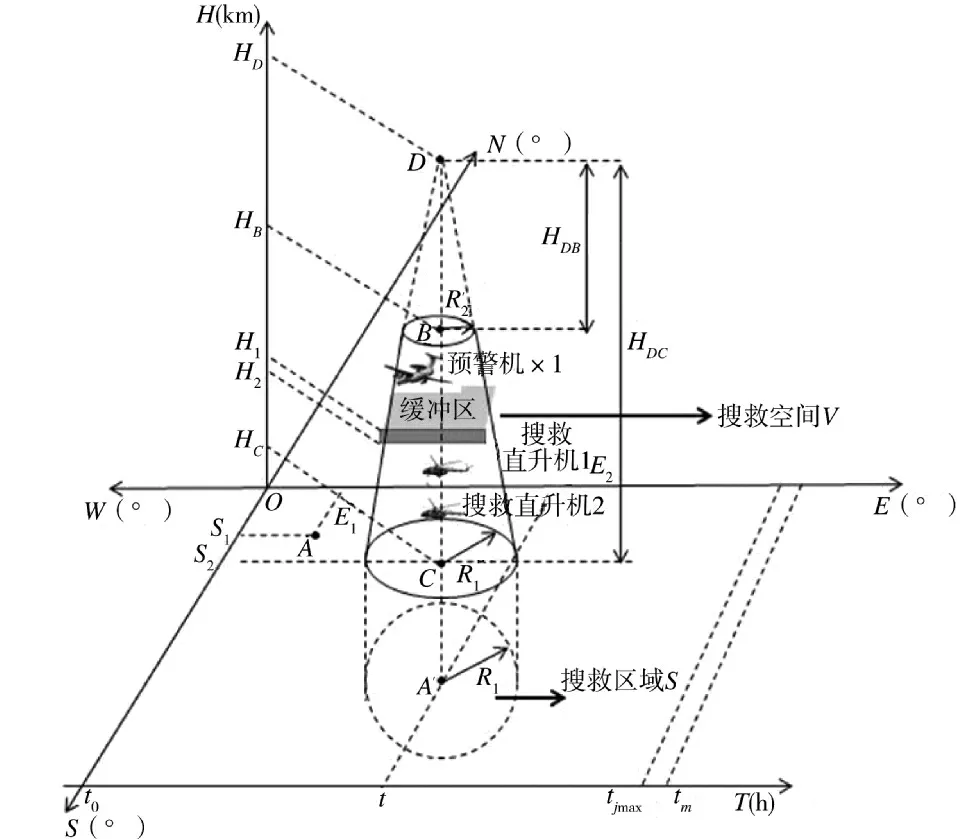
图5 “2+1”力量模式锥体空间模型
由图5 可知,搜救空间容量为:
2.2 “锥体空间”动态管控
空中搜救行动面临情况复杂多样,空间管控过程中应时刻关注目标位置、自然环境和战场环境的发展变化,以便及时对锥体空间进行动态调整,确保空间管控始终能够满足战时空中搜救行动需要。
目标位置。搜救目标位置不同,必然引起搜救区域改变,进而导致搜救方式、力量配置,以及空间态势依次作出相应调整。应当说,整个空中搜救行动过程中,锥体空间始终以搜救目标位置为中心,时刻处于动态调整管控过程中。
自然环境。伴随自然环境变化,锥体空间将呈现出不同态势。海洋环境下,受海面风、潮流作用影响,表现为平底动态锥体空间;平原环境下,气象条件一般较为稳定,表现为平底静态锥体空间;高原或山地环境下,地形起伏较大,且受大风和强气流扰动影响,表现为斜底动态锥体空间。
战场环境。战场环境不同,锥体空间形态也将有所不同。搜救目标位于敌方控制区内,敌情威胁较大时,需要制空战斗机位于高层进行大范围警戒巡逻,通常表现为上宽下窄的反向锥体空间;而当搜救目标位于我方控制区内,敌情威胁较小时,则表现为上窄下宽的正向椎体空间。
2.3 “锥体空间”管控方法
针对空中搜救行动锥体空间,特提出以下管控方法,以便进一步强化管控效果,确保空中搜救行动空间管控活动有力实施。
一是各型力量必须严格遵守空间管控规定,始终保持在各自空间范围内实施和参与搜救行动,若遇紧急情况,需临时突破空间范围,应及时报请相应指挥机构审核批准;
二是空中搜救行动锥体空间应根据各阶段任务不同,规定不同模式下生效时段,各型力量应紧密配合,力争在生效时段范围内高效完成各项搜救任务;
三是搜救行动过程中,锥体空间呈封闭状态,以便更好地形成整体力量优势,并确保搜救行动安全可靠。如有需要增加或减少搜救力量时,需报请相应指挥机构批准,否则,在特定生效时段内,任何力量未经允许不得随意出入。
3 结论
考虑空中搜救行动是于特定空间内,将各型搜救力量优化配置,共同实施的作战行动,因此,空间管控必然成为空中搜救行动予以考虑的关键环节。本文基于“空中搜救锥”概念,结合空中搜救行动特点规律,区分不同行动阶段,分别建立相应的锥体空间模型,最终依据模型,总结并归纳出空中搜救行动空间管控方法。经研究表明,基于“空中搜救锥”概念,建立锥体空间模型,以模型为基础,对空中搜救行动实施空间管控的方法可行。
猜你喜欢
环球时报(2022-09-15)2022-09-15 19:18:27
中学生数理化·中考版(2022年8期)2022-06-14 06:55:54
小猕猴学习画刊(2022年12期)2022-02-06 03:00:42
中国医学影像学杂志(2021年6期)2021-08-13 08:43:38
今日农业(2020年22期)2020-12-14 16:45:58
物理实验(2019年4期)2019-05-07 03:36:38
系统工程与电子技术(2016年2期)2016-04-16 05:16:51
当代经济(2015年4期)2015-04-16 05:57:04
海峡姐妹(2015年3期)2015-02-27 15:09:59
中国中医药现代远程教育(2014年23期)2014-03-01 04:33:37
