基于VBOX设备的车道偏离预警系统性能一致性验证方法
2022-01-25 21:13余天龙谢业军付广林智桂
时代汽车 2022年2期
关键词:一致性
余天龙 谢业军 付广 林智桂










摘 要:为解决目前车道偏离预警系统性能只能通过驾驶员主观感受去评价、难以通过客观数据去验证其性能一致性等难题,利用VBOX设备的定位及车道线勘测功能,获取车辆车道偏离预警系统触发时车辆与车道线的距离值,通过数据分析软件Origin对获取的多组数据进行统计分析,经过试验与分析验证,成功验证该车的车道偏离预警功能一致性较好。结果表明,本文提出的车道偏离预警性能一致性验证方法可行。
关键词:车道偏离预警系统 VBOX设备 一致性
Abstract: In order to solve the problems faced by the current lane departure warning system performance, which can only be evaluated by driver's subjective feeling, and is difficult to through the objective data to verify its performance consistency, the article uses the VBOX equipment positioning and lane line survey, obtains vehicles lane departure warning system when the trigger and the lane line distance, through the data analysis software origin to obtain multiple sets of data for statistical analysis. And through the test and analysis verification, the article finds out that the successful consistency checking the car lane departure warning function is better. Results show that the proposed lane departure warning performance consistency validation method is feasible.
Key words:lane departure warning system, The VBOX equipment, consistency
1 引言
随着人们生活水平的不断提升,人们对于日常出行的要求越来越高,出行安全性与便捷性逐渐成为人们的重点关注对象,进而衍生出了目前汽车领域火热的智能驾驶辅助技术,车道偏离预警系统便是其中之一,车道偏离预警系统通过车载摄像头采集道路图像来识别车道线信息,并实时计算车辆与所在车道相对位置关系和运动趋势,在超过某个安全区域阈值后警示驾驶员偏离车道的行为[1],此系统对于行车安全起到极大辅助作用。但是目前对于车道偏离系统性能一致性验证的方法欠缺,主要依靠测试人员主观感受,缺乏科学客观数据支撑,难以确保验证该功能的安全性和可靠性。此外,目前V-BOX设备多用于传统整车性能测试,用于智能驾驶辅助系统领域的测试较少,随着智能驾驶辅助功能的快速发展,LDW功能的性能测试验证急需更科学可靠的设备加入。
2 国内外研究现状
基于车道偏离预警系统的重要性,针对VBOX设备在车道偏离预警领域以及车道偏离预警系统的测试与评价领域的应用,国内外研究学者进行了大量探索,形成了大量有用的成果。Ayalew Mesfin Mitiku等[2]为探究适合我国道路交通特性的LDWS 的测试与评价技术,对某乘用车LDWS 的客观性能进行实车试验,分析了直道与弯曲路段条件下,偏离方向、光照条件、车道线类型、横向偏离速度等因素对报警点横向距离分布的影响;陈媛媛等[3]为解决我国制订的车道偏离预警系统有明确的场地测试标准但缺乏完善的评价方法难题,尝试设计了一种开放道路测试评价方法。以某车型开发阶段车道偏离预警系统开放道路测试为例,从主、客观2个方面对车道偏离预警系统的适应性进行测试和评价,近20000km的道路测试数据验证了评价方法的有效性;高海龙等[4]提出了一种基于VBOX-ADAS模塊的车道保持系统测试方法。该方法不仅考虑了目前车道保持系统的实际情况,更结合了实际仪器的使用,使得测试方法具有实际意义和使用价值。Leeza Panda等[5]对车道偏离预警系统的策略和车道识别方法进行广泛的分析,特别是对于不同的道路结构,车道检测的不同难度。在以上研究基础下,提出一种基于VBOX设备的车道偏离预警系统性能一致性测试验证方法。
3 i-VISTA(中国智能汽车指数)介绍
i-VISTA (Intelligent Vehicle Integrated Systems Test Area)是在国家工信部和重庆市政府支持下,共筹共建的具有国际领先水平的智能汽车和智慧交通应用示范工程及产品工程化公共服务平台。基于i-VISTA 示范区平台,中国汽车工程研究院股份有限公司在中国汽车工业协会和中国汽车工程学会的联合指导下,充分研究并借鉴国内外智能网联汽车试验评价方法,结合中国自然驾驶数据和中国驾驶员行为特性统计分析的研究成果,经过多轮论证,形成i-VISTA 智能汽车指数评价体系。
4 Racelogic VBOX介绍
Racelogic VBOX测试系统和VBOX数据采集系统简称VBOX或者汽车VBOX,主要组成有:VBOX传感器,VBOX显示器,VBOX模块,VBOX数据采集系统,VBOX RLVB3i,VBOX MICRO,VBOX MINI,VBOX RLVB2SX等。VBOX是测量车辆行驶速度和位置的行业标准。基于一系列高性能的GPS卫星信号接收器,Racelogic VBOX测试系统可以高精度地测量速度,距离,加速度,制动距离,位置,航向角,侧偏角,单圈时间,转角力等等参数。VBOX主机可以和一系列的输入和输出的模块结合使用,使其可以成为一个强大和灵活的数据采集系统。由于它有同步GPS和视频,CAN总线和IMU数据的功能,所以Racelogic VBOX测试系统是世界上汽车及轮胎制造商的测试部门的最佳选择。
本文中用到的车道偏离预警系统的测试设备主要由定位基站、VBOX主机、VIDEO VBOX、GPS天线及相关配件组成,采用GPS+GLONASS组成定位方式,利用实时的动态DGPS来获得高精度的RTK定位,即载波相位差分技术,又称RTK(Real Time Kinematic)技术,如图1,是实时处理两个测站载波相位观测量的差分方法。即是将基准站采集的载波相位发给用户接收机,进行求差解算坐标。载波相位差分可使定位精度达到厘米级。大量应用于动态需要高精度位置的领域。设备安装简单 ,定位精度较高,基站模式下RTK定位精度可达到2CM,通过高精度的定位使得VBOX设备可采集显示车辆多种位置及车身参数信息,如车辆边缘到车道线的距离、偏离车道线的速度、与车道线的角度等,这为智能驾驶辅助系统中车道偏离预警系统测试数据提供极大帮助。
5 测试准备
5.1 车辆准备
准备一台某品牌带有车道偏离预警功能的车型,确保车辆该功能可以正常使用并无其他影响该功能的故障。
5.2 场地准备
要求测试场地为封闭道路,车道线清晰并满足相关标准要求,场地无房屋、树木等遮挡。
5.3 VBOX设备准备
按照连接示意图2连接好VBOX设备,按车道偏离预警功能测试操作手册进行相关设置,确保VBOX设备处于RTK定位状态并足够稳定。
6 测试内容
此次测试内容主要参考I-VISTA的车道偏离预警试验工况,具体如表1。
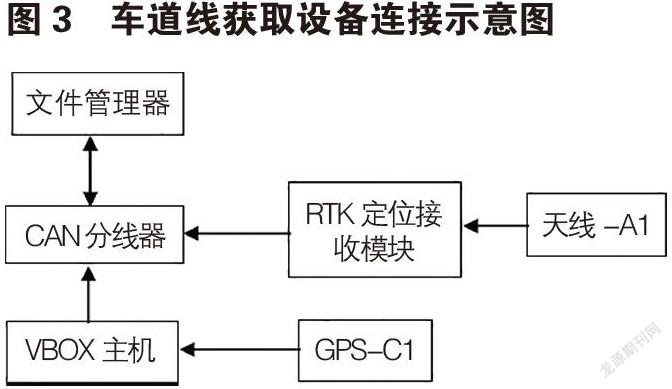
6.1 车道线获取
车道线获取设备连接如图3,按图连接好设备准备开始勘测车道线。
6.1.1 直道车道线获取
1)将车开到离车道线较近的地方;
2)将GPS天线置于勘测杆并放在车道线的起点位置,这个点为车道线内侧,保持勘测杆垂直于地面,如图4;
3)在文件管理器中勾选第一个点;
4)到第二个点重复以上步骤,得到第二个点,通过两个点得到一条直道车道线。
6.1.2 弯道车道线获取
1)将设备安装到小推车上,并将小推车放到弯道车道线起点,如图5,开始采集;
2)沿弯道将小推车推到终点后,停止采集;
3)获取到一条弯道车道线。
6.2 直道可重复性试验方法及步骤
6.2.1 直道左偏
车辆以恒定车速60km/h在车道线内行驶,当速度稳定后进入试验车道内,保持在试验车道中央行驶,稳定至少5S后开始以恒定偏离速度0.2m/s左偏。当车道偏离预警系统报警时,记录车辆左前轮外缘与左侧车道线内缘的距离。
重复以上操作,记录10组数据。
6.2.2 直道右偏
车辆以恒定车速60km/h在车道线内行驶,当速度稳定后进入试验车道内,保持在试验车道中央行驶,稳定至少5S后开始以恒定偏离速度0.2m/s右偏。当车道偏离预警系统报警时,记录车辆右前轮外缘与右侧车道线内缘的距离。
重复以上操作,记录10组数据。
直道可重复性试验结果如表2。
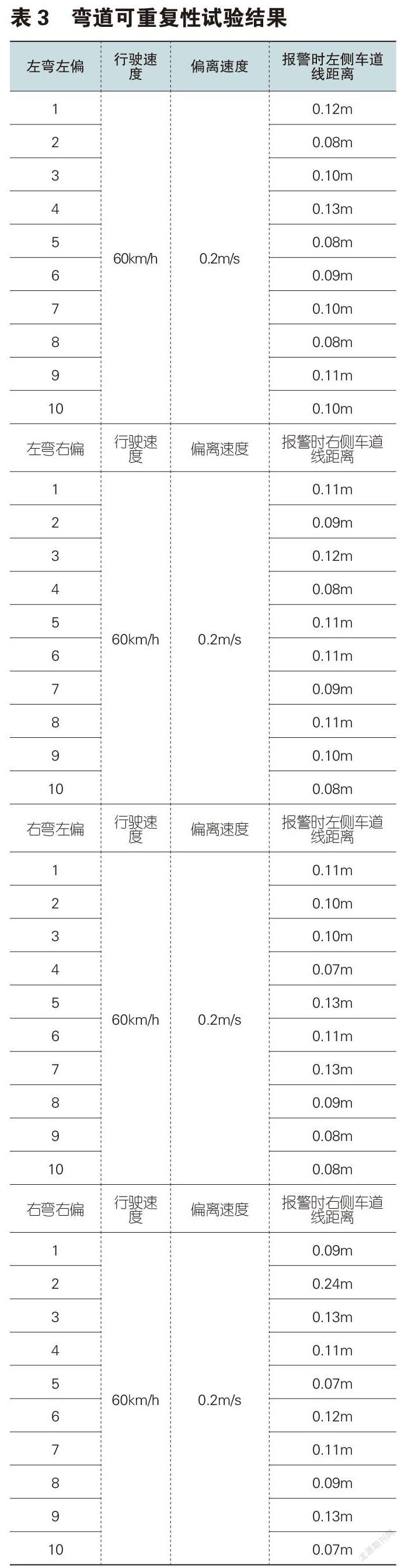
6.3 弯道可重复性试验方法及步骤
6.3.1 左弯左偏
车辆以恒定车速60km/h在车道线内行驶,当速度稳定后进入试验车道内,保持在试验车道中央行驶,稳定至少5S后开始以恒定偏离速度0.2m/s左偏。当车道偏离预警系统报警时,记录车辆与左侧车道线的距离。
重复以上操作,记录10组数据。
6.3.2 左弯右偏
车辆以恒定车速60km/h在车道线内行驶,当速度稳定后进入试验车道内,保持在试验车道中央行驶,稳定至少5S后开始以恒定偏离速度0.2m/s右偏。当车道偏离预警系统报警时,记录车辆与右侧车道线的距离。
重复以上操作,记录10组数据。
6.3.3 右弯左偏
车辆以恒定车速60km/h在车道线内行驶,当速度稳定后进入试验车道内,保持在试验车道中央行駛,稳定至少5S后开始以恒定偏离速度0.2m/s、0.5m/s左偏。当车道偏离预警系统报警时,记录车辆与左侧车道线的距离。
重复以上操作,记录10组数据。
6.3.4 右弯右偏
车辆以恒定车速60km/h在车道线内行驶,当速度稳定后进入试验车道内,保持在试验车道中央行驶,稳定至少5S后开始分别以恒定偏离速度0.2m/s右偏。当车道偏离预警系统报警时,记录车辆与右侧车道线的距离。
重复以上操作,记录10组数据。
弯道可重复性试验结果如表3。
7 测试数据统计分析
7.1 设备测量车辆离车道线距离原理
如图6,以直道左偏为例,VBOX设备测量的横向距离值为L,即装在试验车车顶GPS天线到左侧车道线内侧的距离,但是试验需要得到的横向距离实际为试验车左前轮外侧到左侧车道线内侧距离,即L2。
L2可以通过L和L1得出
L2=L-L1;
其中L1=S*sin(α+β);其中S、α和β均为已知值
L2=L-S*sin(α+β);
则从VBOX设备中读出的L值均可通过上述公式得出实际距离车道线值,工况直道右偏、左弯左偏、左弯右偏、右弯左偏、右弯右偏同理。
7.2 测试数据统计
由以上内容可知,测试结果数据如表4。
7.3 测试结果分析
利用Origin分析软件对测试数据进行分析,通过对得到的数据进行单样本t检验分析,得出实际车道预警系统性能与设计性能是否一致。车道偏离预警系统的设计性能为:直道场景下距离车道线0.2m为报警界限值,即当车辆距离车道线距离≤0.2m即触发车道偏离预警系统;弯道场景下距离车道线0.1m为报警界限值,即当车辆距离车道线距离≤0.1m即触发车道偏离预警系统。
7.3.1 直道车道偏离预警系统测试数据分析
通过Origin软件分析,已知在直道场景下,设计的系统报警界限值为0.2m,則通过将单样本t值设置为0.2m,允许的差异水平设置为0.01,以此分析直道场景下获取的车道偏离预警系统报警距离值是否具有显著差异性,分析结果如图7、图8。
从图7、图8中我们可以直观看出,直道左偏、直道右偏的均值分别为0.204、0.201,通过将其与设计性能值0.2进行比较分析差异性,得出在直道场景,0.01的允许差异水平下,总体均值与检验均值不存在显著不同,即车道偏离预警系统在直道下性能一致性较好。
7.3.2 弯道车道偏离预警系统测试数据分析
通过Origin软件分析,已知在弯道场景下,设计的系统报警界限值为0.1m,则通过将单样本t值设置为0.1m,允许的差异水平设置为0.01,以此分析弯道场景下获取的车道偏离预警系统报警距离值是否具有显著差异性,分析结果如图9、图10。
从图9、图10中我们可以直观看出,左弯左偏、左弯右偏、右弯左偏、右弯右偏的均值分别为0.099、0.1、0.1、0.106,通过将其与设计性能值0.1进行比较分析差异性,得出在弯道场景,0.01的允许差异水平下,总体均值与检验均值不存在显著不同,即车道偏离预警系统在弯道下性能一致性较好。
8 结论
本文基于VBOX设备以及i-VISTA的车道偏离预警试验工况,对某车型的车道偏离预警系统性能进行试验,并利用数据分析软件Origin对获取的多组数据进行差异性分析的方法,验证了该车道偏离预警系统性能一致性,结论如下:
1、该试验车辆的车道偏离预警系统性能一致性较好
1)在直道场景下,左偏和右偏报警时车辆与车道线的距离均值分别为0.204m和0.201m,与系统设计值0.2m无显著差异,即在直道场景该系统性能一致性较好。
2)在弯道场景下,左弯左偏、左弯右偏、右弯左偏和右弯右偏报警时车辆与车道线的距离均值分别为0.099m、0.1m、0.1m、0.106m,与系统设计值0.1m无显著差异,即在弯道场景该系统性能一致性较好。
2、通过实测表明,本文提出的车道偏离预警系统性能一致性验证方法在实际应用中可行。
参考文献:
[1]SANDSTROM M,LAMPSIJARVI EHOLMSTROM A, et al.Detecting lane departures from steering wheel signal[J]. Accident Analysis & Prevention,2017,99(4) :272-278.
[2]Ayalew Mesfin Mitiku,邵毅明,张磊,王蓉,彭金栓.某乘用车车道偏离预警系统测试与评价[J].重庆交通大学学报(自然科学版),2020,39(11):141-146.
[3]陈媛媛,杨良义,张强,李艺.车道偏离预警系统开放道路测试评价方法研究[J].重庆理工大学学报(自然科学),2020,34(08):63-69+94.
[4]高海龙,李超,朱鑫,姜晓来,董帅.基于VBOX-ADAS模块车道保持系统测试研究[J].汽车科技,2018(06):95-99.
[5]Leeza Panda,Bibhu Prasad Mohanty. RECENT DEVELOPMENTS IN LANE DEPARTURE WARNING SYSTEM: AN ANALYSIS[J]. Ethics And Information Technology,2020,2(2).
作者简介
余天龙:(1996.04—),男,汉族,广西钦州市人,本科学历,上汽通用五菱汽车股份有限公司技术中心智能驾驶测试评价工程师。研究方向:智能网联汽车。
猜你喜欢
考试周刊(2022年24期)2022-07-22
计算技术与自动化(2022年2期)2022-07-04
福建基础教育研究(2020年1期)2020-05-28
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
决策探索(2018年3期)2018-03-10
现代经济信息(2016年8期)2016-12-26
商(2016年28期)2016-10-27
科技视界(2016年6期)2016-07-12
科技视界(2016年8期)2016-04-05
科技视界(2016年3期)2016-02-26