零工工作者感知算法控制:概念化、测量与服务绩效影响验证
2022-01-24 07:41裴嘉良刘善仕瞿皎皎
南开管理评论 2021年6期
○ 裴嘉良 刘善仕 崔 勋 瞿皎皎
引言
得益于数字技术与迎合社会发展的按需平台经济的深度融合,零工经济(Gig Economy)作为全球经济中的一股新兴力量,吸引大量零工工作者(Gig Worker)依托在线劳动平台(On line Labor Plat form)成为城市中动态、移动的新价值符号。[1]在新兴的零工经济背景下,在线劳动平台针对分布在不同“时空”、以自雇佣身份存在的零工工作者创新出通过大数据驱动的AI 算法,根据平台内置的技术规则和标准化的流程自动输出控制职能的数字化管理实践,理论界将这一过程称为算法控制(Algorithmic Control)。[2-4]算法控制以一种“无形隐蔽”的方式重新配置了平台、顾客和工作者之间的生产关系,并且对零工工作者由“社会人”转变为“系统人”的工作状态产生重要影响。[3]
与实践对应,理论界关注在线劳动平台如何利用领先的算法技术和数据信息优势控制脱离组织直接监管的零工工作者,以及算法控制对其态度、行为产生的具体影响,研究成果逐年增多。[5-7]现有算法控制的研究基本围绕以下三类问题展开:第一,算法控制的概念和内涵。有学者认为,算法控制是指在线劳动平台使用算法来监控零工工作者行为,[7]并确保其与平台组织目标一致的过程。[8]也有学者将算法控制的内涵进一步丰富,提出算法控制是指一套基于算法技术设计的控制系统,[6]被平台赋予制定和执行影响劳动决策的职责,从而针对零工工作者参与在线劳动服务的过程进行实时控制和监督。[9]第二,算法控制的具体实践内容。从现有研究成果来看,算法控制的实践内容愈发丰富和完善,有学者提出算法控制包括任务分配、信息支持、评估绩效和动态激励四个方面的实践内容;[7,10]也有学者系统归纳出算法控制具有算法推荐、算法限制、算法记录、算法评级、算法替换和算法奖励六个方面的实践内容。[11]第三,算法控制对零工工作者的影响。部分研究指出,算法控制有助于提升零工工作者积极的情感体验和行为表现,如兴奋感、公平感等;[10,11]但也有研究表明,算法控制会给零工工作者带来不良的工作后果,如工作负荷、工作不安全感等。[3,12]
现阶段针对算法控制的相关研究为后续深入挖掘其重要的作用机理奠定了基础,但这些研究缺乏对算法控制概念的统一界定,也没有关于算法控制的测量工具,对工作场所中算法控制的定量研究更是鲜有涉及,而定性研究所得出的结论存在广泛争议,学者们未能揭示出算法技术如何重塑平台和零工工作者之间的控制关系。此外,考虑到现有研究主要基于平台视角分析算法控制的内涵及影响,而零工工作者在人机交互过程中如何感觉、认知和评价算法控制,会从根本上影响或塑造他们的态度和行为,不同工作者对于算法控制的实践有着不同的感知和理解,并会相应做出不同的回应。[13,14]因此,有必要基于个体感知视角,以零工工作者的主体视角将算法控制的内涵概念化,并以此为依据开发零工工作者感知算法控制(Perceived Algorithmic Control, PAC)的测量工具,开展实证研究探索感知算法控制对零工工作者态度和行为的微观作用机理,促进学术界和实践界对算法控制这一新兴数字化管理策略的科学认知。
目前算法控制的研究尚停留在定性探讨的初步阶段,许多研究问题因忽视了零工工作者感知算法控制的视角且缺乏系统科学的论证而存在较大的理论争议。鉴于此,本研究主要回答以下三个方面的重要问题:一是何为零工工作者感知算法控制,如何界定此概念?二是零工工作者感知算法控制包含哪些维度,如何对其进行科学测量?三是零工工作者感知算法控制对其服务绩效的影响机制是什么?
一、理论基础
1.劳动过程理论、理性控制与算法技术
劳动过程理论强调雇主如何通过建立针对工作者的控制以实现工作者劳动创造的价值最大化。[15-18]在上述观点下,控制是一个辩证的过程,雇主不断地创新控制机制以最大限度地从工作者劳动产出中获取最大价值。一个多世纪以来,组织管理领域的学者发现,管理者主要通过规范控制和理性控制两种形式来控制工作者的劳动过程,当雇主试图通过“赢得工作者的承诺和投入”以获得所期望的行为时,他们使用规范控制;[19]当雇主试图通过“强调工作者自身的利益”以获得所期望的行为时,他们使用理性控制。[20]本研究则主要关注算法控制作为一种新的理性控制形式在劳动过程中如何影响或塑造零工工作者的态度和行为。
在大量的理性控制文献中,学者们主要提炼出指导、评估和约束三种控制机制,帮助雇主从工作者的劳动过程中获得期望的行为:首先,“指导”要求雇主明确工作的执行标准和具体规则,向工作者说明工作内容、完成顺序及时间周期;[18]其次,“评估”要求雇主记录工作者劳动过程中的信息,并以此为依据评估绩效,确定那些表现优异或表现不佳的工作者;[21]最后,“约束”要求雇主采取奖励或惩罚的措施,以引导工作者遵守雇主对劳动过程的指导。[22]此外,建立在三种理性控制机制之上,劳动过程理论的学者们还归纳出官僚控制和技术控制两种理性控制的形式。其中,官僚控制建立在组织的正式结构中,依赖于标准化的正式规则、程序和角色系统来指导工作者的行为,为组织政策的非人格化力量奠定合法性基础;[23]而技术控制则替代了雇主的直接监控,自动化的生产模式可以使雇主通过推动工作者以特定的速度完成特定的任务来建立指导,雇主也可以依靠机器设备或计算机终端的信息来评估工作者的效率,此外雇主通过标准化和去技能化使工作者的行为受到约束,惩罚或替换不遵守技术控制的工作者。[18]
技术创新在促进雇主发明新型的控制系统方面发挥着重要作用。[24]在数字经济时代,算法技术的进步正在推动雇主对理性控制实施的变革。算法通常被定义为将输入数据转换成所需输出的计算机编程程序,它既是一种计算公式,根据统计模型和决策规则自动运算,其工作过程无需人工干预,也是一系列的指令组合,由算法告诉计算机在一系列精准的步骤和规则内应该如何工作以完成目标任务。[5]现阶段,算法技术已经由单调重复地执行既定的控制程序,转变为能够在工作运转时随着数据流持续大量地输入而不断重写升级的高级系统,这使算法对组织管理情境中复杂问题的分析、推导和处理变为可能。[25]算法技术的发展可以进一步地优化指导、评估和约束三种控制机制,重新构建雇主与工作者之间的关系,将依托于正式组织架构的官僚控制应用于扁平化的平台型组织,通过算法控制可以将官僚控制的逻辑思想和技术控制的方式手段相结合,构建出一种新的理性控制形式。
2.算法控制相关研究
在线劳动平台利用数字技术满足零工经济市场中短期劳动服务的需求,通过算法将提供劳动服务的零工工作者与愿意支付劳动报酬的消费者之间相匹配。[26]刘善仕等结合算法控制的研究成果认为,[6]在线劳动平台通过移动互联网连接劳工方和用工方,利用数字技术实现短期劳动服务需求(结构化/ 非结构化)和供给的精准快速匹配,并针对在线劳动过程实施大数据驱动的算法管理策略,其中算法管理是一套由算法组成的控制系统。可见,在线劳动平台与算法技术相互交织又相辅相成:一方面平台通过算法技术创新出一种新的商业模式,挖掘竞争优势,充分发挥零工经济市场中富余或闲置人力资本的价值;[27]另一方面算法还通过平台这一物质载体不断输出控制职能,强化平台的监控手段,增强平台在远程且没有人工干预情况下的管理能力。[1,28]
在关于算法控制对零工工作者实际工作状态影响的广泛探讨中,由于新情境下的核心概念缺乏科学统一的界定方式,测量工具的缺失也导致定量研究鲜有涉及。因此,学者们对于上述问题的探讨呈现出矛盾的研究结论。如Rosenblat 等[10]认为Uber 基于算法设置游戏化、象征性奖励及实时反馈,动态影响着工作者的情感体验,试图通过有趣和兴奋的感觉激励他们的态度和行为;但Wood 等[3]却认为在算法针对零工工作者何时、何地及如何工作的持续控制下,违背了在线劳动平台所倡导的灵活自主的工作状态,加上他们担心算法评估对他们声誉和收入带来的实际影响,加剧了零工工作者的不安全感,高强度的压力甚至影响到他们的身体健康。刘善仕等[6]和Shevchuk 等[12]同样指出,尽管由于零工工作者依赖于算法所提供的技术支持,他们愿意在算法控制的环境下不断自主地进行工作强化,这会导致“自主性却带来非自主工作状态”的工作自主悖论现象。
二、零工工作者感知算法控制的维度构建与概念化
1.理论抽样
零工工作者感知算法控制是描述零工工作者对于算法控制的感受和认知而提出的新构思。本研究根据理论抽样的基本原则,[29,30]有目的地将具有典型性和代表性的从事网约出行和外卖配送的零工工作者作为潜在的抽样对象。具体而言,网约车司机和外卖骑手作为零工经济中最为活跃的群体,其与算法交互密切,工作过程始终受到算法标准化、流程化、定额化和高强度的实时控制。[7]因此,网约车司机和外卖骑手对于算法控制的感受和认知更符合零工工作者感知算法控制的具体内涵。
研究小组通过联系网约车平台和外卖配送平台的线下团队管理负责人来招募志愿者。为更加符合理论抽样的基本原则,本研究在抽样前要求志愿参与访谈收集数据的零工工作者回答以下问题:“在劳动服务过程中,我感觉受到平台算法(APP 系统)的持续监控。以上描述多大程度上符合您的真实感受?1 为完全不符合,5为完全符合。”最终,将回答4 或5 的零工工作者选作抽样对象,通过面对面沟通确定了符合能切实感知到算法控制、平均每日在线时长不低于2 小时和不同职业类型(全职/ 兼职)要求的20 名零工工作者作为访谈对象(网约车司机和外卖骑手各10 名),并随机分成2 组,其中一组样本作为理论模型构建使用,另一组作为理论饱和度检验使用。
2.数据收集
本研究采取半结构化深度访谈的方式来有效地收集数据。在正式进行访谈前,由2 位OBHRM 领域的专家和3 名网约出行和外卖配送平台的算法工程师组成的专家小组提出访谈提纲的具体建议,通过预访谈最终确定了围绕“零工工作者在劳动服务过程中能否感知到算法控制?如果可以,零工工作者如何感受、认知和评价算法控制?零工工作者感知算法控制的体验由哪些因素构成”等核心问题,包括5 道题目和1 个背景提示语的正式访谈提纲。正式访谈小组由1 名OBHR M 领域专家和2 位博士生组成。在确定正式访谈提纲后,访谈小组针对10 名网约车司机和10 名外卖骑手进行了多轮一对一半结构化深度访谈,每轮访谈的时间基本控制在1-1.5 小时。在20 名受访的零工工作者中,超过2/3 的人员平均每日在线超过8 小时,超过2/3 的人员为男性,平均年龄为33.5 岁,平均工作年限为2年,但仅有1/3的人员具有本科及以上的学历。
进一步借鉴张镒等[31]确保数据编码结果的信度和效度的方法,本研究还通过多个数据信息来源针对数据资料进行严格的“三角验证”,以对访谈数据进行补充和完善。其他的数据信息来源还包括:研究人员持续追踪网约车司机和外卖骑手在微信群、Q Q 群、新浪微博等在线社群的发声言论,汇聚成网络文本;权威媒体针对网约车司机和外卖骑手的相关新闻采访和报道;平台官方网站、微信公众号推送的公开信息,以及公开发表的相关书籍和文献资料等。此外,本研究还通过组内和分组讨论,邀请由相近领域的博士生组织成的学生小组和由相近领域学术专家和算法工程师组成的专家小组对编码结果进行交叉对比和反复校正,科学处理编码过程中存在的争议,以此确保人工编码结果的合理性和客观性。
3.数据编码
(1) 开放式编码。本研究通过对数据资料进行逐句、逐段分析,使用抽象概念性的语句和词汇针对关键的概念信息进行系统归纳和提取。为尽可能最真实地反映零工工作者对于算法控制的感受、认知和评价,本研究基于零工工作者的第一主体视角对他们的表述进行编码,确保数据资料的真实性。最终,本研究通过对数据资料的系统归纳总结共提取出215 个初始概念(示例见表1)。
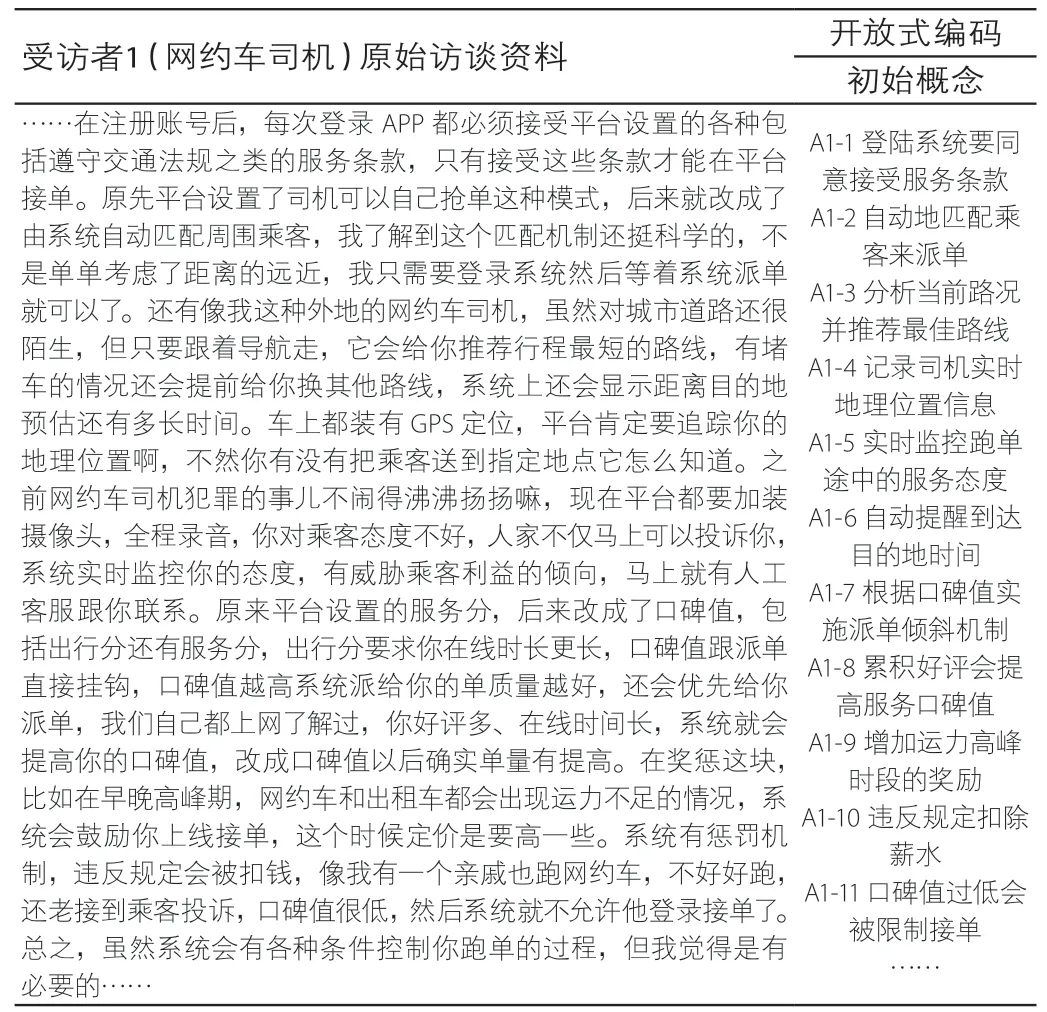
表1 开放式编码结果示例
(2)选择性编码。在开放式编码的基础上,本研究通过对数据资料及由此提取出的初始概念进行全面筛选、概括、聚类和区分,需要识别出更有代表性、识别度且能够统领初始概念的副范畴和核心范畴。[29,32]在本研究中,针对215 个初始概念的关联性进行分析,通过归纳整理和反复研究比对,最终提取出与零工工作者感知算法控制相关度较高的16 个副范畴,进一步合并规整为3 个核心范畴(见表2)。
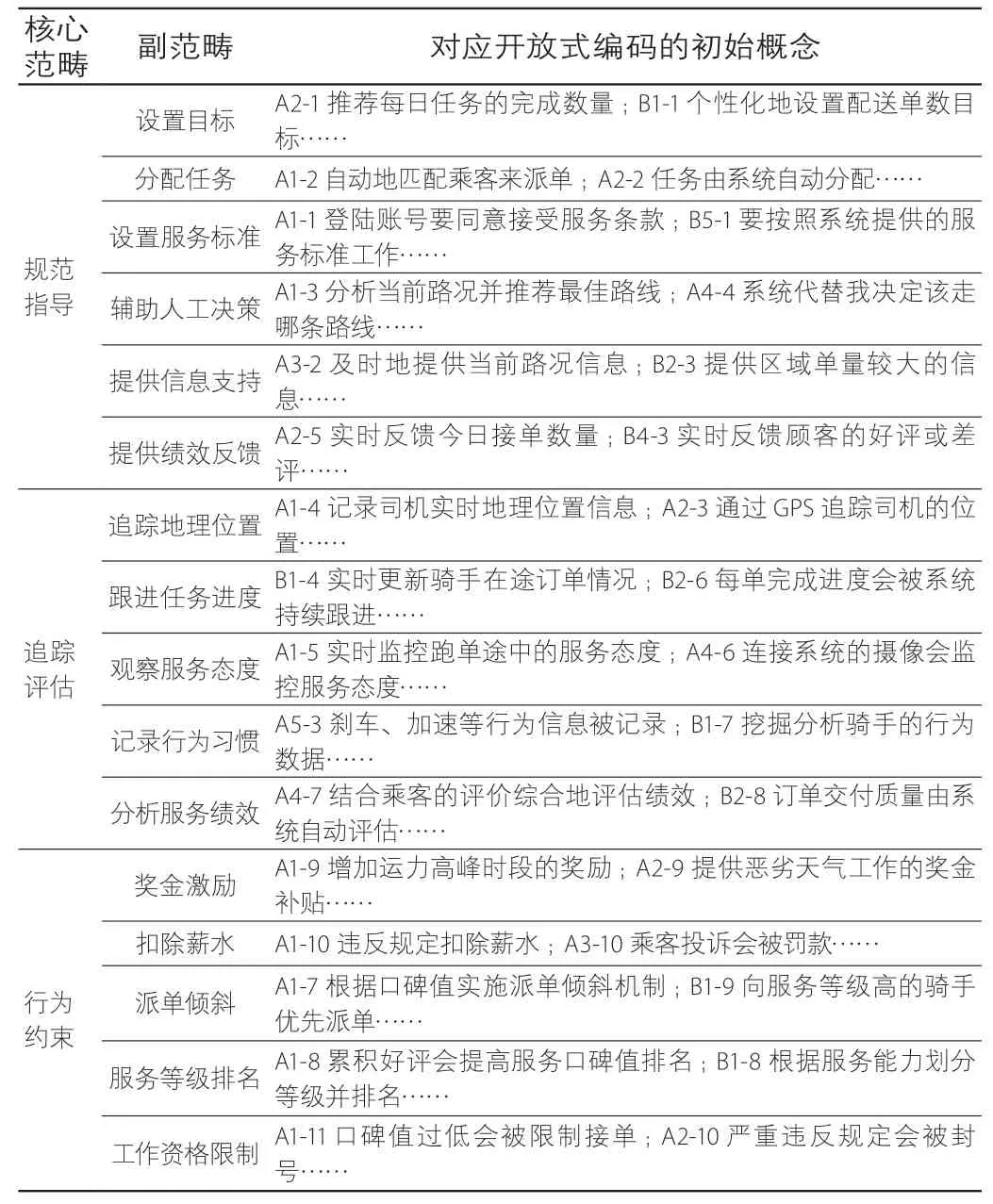
表2 选择性编码结果示例
(3)理论编码。综合比较和分析开放式编码、选择性编码的结果及零工工作者感知算法控制现有相关研究,参考劳动过程理论的核心思想,本研究构建出以“规范指导”“追踪评估”和“行为约束”为核心范畴的零工工作者感知算法控制的结构维度(见图1)。其中,“规范指导”指零工工作者感知到算法通过规范劳动服务的规则和流程,向他们提供任务分配、服务标准和决策信息等资源,进而指导他们以特定的速度和要求完成特定的任务的过程;“追踪评估”指零工工作者感知到算法实时追踪和记录他们劳动服务过程中的地理位置、任务进度和工作态度等,在获取基于顾客主观评价和平台客观指标的反馈数据信息后自动地评估他们的绩效的过程;“行为约束”指零工工作者感知到算法通过设置一系列的奖励或惩罚机制,使他们按照有利于实现既定目标的机制规范自身行为,进而达到平台所期望的良好结果的过程。
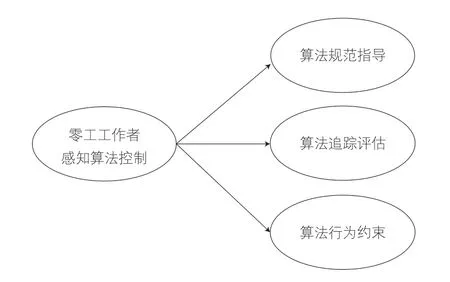
图1 零工工作者感知算法控制模型构思
4.理论饱和度检验
结合其他来源的数据资料,本研究对另一组样本的访谈数据进行理论饱和度检验,在连续比较了多个数据对象、没有新的内容后停止采样。结果表明,现有理论模型中的概念范畴已发展完备,对于零工工作者感知算法控制的3 个主范畴均没有发现新的范畴和关系,说明上述理论模型已饱和。
5.概念提炼
基于扎根理论,本研究首先确认了零工工作者能够真实感知到其劳动服务过程中算法在各个方面的控制,并且与传统的技术监控手段有明显不同。如使用算法技术监控零工工作者的实践,区别于传统的电子绩效监控实践,算法控制的范围深度、数据整合及分析决策能力很大程度上得到扩展。[33]零工工作者感知算法控制产生于特定的劳动服务情境,是零工工作者在从事由平台APP 介入的劳动服务过程中受到算法系统对其控制的综合体验。本研究站在零工工作者的主体视角,探索算法控制的概念内涵,结合扎根分析的结果,超越劳动过程理论传统雇佣关系视角下针对技术控制的界定,探究适用于在线劳动服务新情境的定义,将零工工作者感知算法控制的概念界定为:零工工作者对于算法如何通过规范指导、追踪评估和行为约束对其提供在线劳动服务的过程进行实时动态控制的综合感知。上述定义强调了零工工作者在提供在线劳动服务过程中与算法实时交互而产生的个体感受和深度认知,还指明了该定义具体包括哪些维度。
三、零工工作者感知算法控制量表的开发与检验
1.初始量表生成
本研究运用演绎归纳的方法,结合已有代表性文献和上述编码结果,构建初始量表。首先,基于编码结果,共获得了32 个语义较为明确的测量条目,每个副范畴对应2 个问项,构成了初始题项库。其次,为确保初始量表的内容效度,遵循简明扼要、清晰一致和避免歧义的原则,研究小组针对各个题项与主题的相关度、表达的准确度和清晰度等进行评估,删除具有歧义或模糊不清的题项后达成一致,内容效度具有一定的可靠性。经过题项的修订、合并和删减,剩下20 个题项。最后,本研究邀请两位OBH R M 领域专家及10 名零工工作者对包含20 个题项的量表进行可读性、准确性和代表性的评价。研究小组综合各方评价意见,对初始量表进行修订,最终确定了包含16 个题项的初始量表,每个副范畴对应1 个问项。此外,本研究考虑到上述量表开发后的可操作性和外部效度,将问卷的题项均以第一人称的方式表达,用通俗易懂的词汇代替了复杂的专业词汇,并将问卷的初始语设置为:“请您回想在提供劳动服务的过程中,当感知到算法(平台APP 的系统)控制时,您多大程度上同意下列描述?(请根据您的真实感受,考虑下列每一个句子的符合程度,在1 到5 之间打√,其中,1:非常不符合,3:不确定,5:非常符合)。”
2.探索性因子分析
为检验结合现有文献和访谈编码结果所预期的因子结构是否能有效测度核心构念,本研究采用SPSS 24.0 软件进行探索性因子分析以确定量表维度和结构。在进行探索性研究之前,研究小组在不同城市通过联系网约出行和外卖配平台的区域负责人,通过问卷星软件采取在线填写的方式发放问卷290 份,剔除填写不认真、缺填和漏填的问卷,最终得到有效问卷277 份(样本一),有效问卷回收率为95.5%。样本一的人口统计学特征如下:男性工作者204 名,年龄超过30 周岁的工作者143 名,本科以上学历的工作者116 名,全职工作者218 名,日均在线时长超过6 小时的工作者179 人。本次调研采用的是初始量表,共包括16 个题项,并使用李克特5 级量表进行测量。
在进行探索性因子分析之前, 本研究采取Cronbach's α 系数对问卷进行信度检验,以评价量表的内部一致性。有文献表明,探索性研究的因子Cronbach's α 值大于0.6,同时总体相关系数(CITC)值大于0.5 的题项建议保留。[34]随后针对样本一进行检验,结果发现,初始题项“登录平台APP 后,我每日的任务目标由算法自动设置”“在平台工作过程中,我日常的行为习惯被算法监控和记录”“当违反平台规定时,我的工作资格被算法限制或取消”的CITC 值均小于0.5,且个别题项的Cronbach's α 值小于0.6,未达到标准要求,故删除上述3 个题项。进一步,初始题项样本一数据K MO 值为0.794,Bartlett 的χ2值为1008.776(p<0.001),说明样本一数据适合进行因子分析。[35]基于此,本研究采用主成分分析法提取因子及最大方差法正交旋转针对剩余的13 个初始题项进行分析和删减,标准如下:特征根大于1,题项因子载载荷大于0.5,题项间不存在交叉负荷,同一维度下题项之间内涵一致。基于上述标准,经过多次探索性因子分析,剔除和删减不达标的题项后共得到3 个维度11 个题项的零工工作者感知算法控制量表。其中,规范控制(α=0.813,共4 题)、追踪评估(α=0.779,共4 题)和行为约束(α=0.782,共3 题)。数据显示(见表3),各个题项的载荷水平介于0.735-0.875,不存在交叉负荷,累计方差贡献值达到64.469%,探索性因子分析结果和预设因子结果基本吻合,较好地表征了零工工作者感知算法控制的3 个维度。
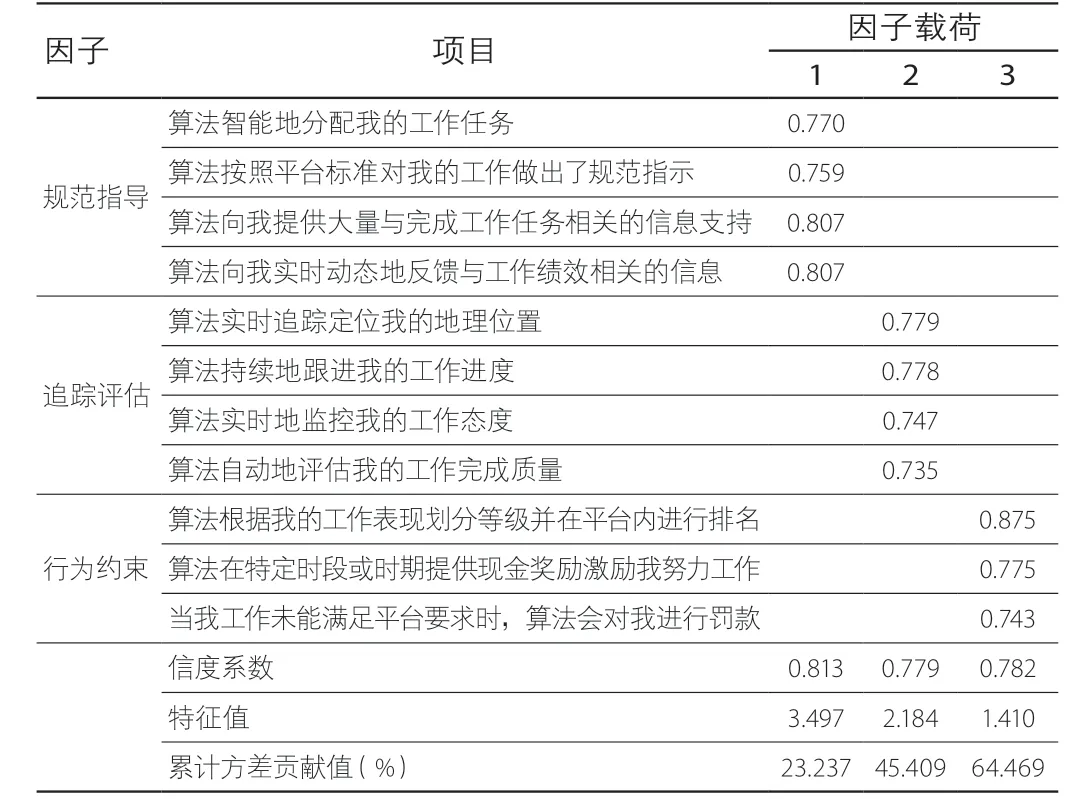
表3 探索性因子分析结果
3.验证性因子分析
本研究采用A MOS 24.0 进行验证性因子分析,以进一步检验构念的效度。Fok kema 等提醒研究者不要对同一样本进行探索性和验证性因子分析,[36]因此,本研究重新抽样,共发放问卷350 份,剔除填写不认真、缺填漏填的问卷,最终得到有效问卷312 份(样本二),有效问卷回收率为89.1%。样本二的人口统计学特征如下:男性工作者221 名,年龄超过30 周岁的工作者157名,本科以上学历的工作者158 名,全职工作者232 名,日均在线时长超过6 小时的工作者203 人。
首先,为检验样本二的有效性,本研究对数据进行信度检验。数据显示,整个量表的Cronbach's α 值为0.806,分量表的信度系数均大于0.7,说明具有良好的内部一致性,可以运用结构方程模型进行验证性因子分析。[37]进一步,本研究设计了7 个模型进行检验,以找出最优的拟合模型。其中,模型0 为由观测变量组成相互独立的虚无模型;模型1 为包含规范指导、追踪评估和行为约束的2 阶3 因子模型;模型2 为包括规范指导、追踪评估和行为约束的1 阶3 因子模型;模型3 将规范指导和追踪评估合而为一,形成行为约束的1 阶2 因子模型;模型4 将规范指导和行为约束合而为一,形成追踪评估的1 阶2 因子模型;模型5 将追踪评估和行为约束合而为一,形成规范指导的1 阶2 因子模型;模型6将规范指导、追踪评估和行为约束合而为一,构成1 阶单因子模型。
现有文献大多通过拟合优度指数(χ2、d f、χ2/df)、相对拟合指数(IFI、CFI)、绝对拟合指数(RMSEA、RMR)来综合评价模型的拟合度。[36]数据结果表明(见表4),模型1 和模型2 具有较好的拟合优度,并且由于模型1 和模型2 均只构建了3 个维度,两个模型的各项拟合指数值一致,说明1 阶3 因子模型和2阶3 因子模型拟合效果基本一致。[37]其中,χ2(41)=65.705,χ2/df=1.603 小于3,RMSEA=0.044 小于0.06,R M R=0.052 小于0.06,GF I、AGF I、C F I、I F I 指数 均大于0.9,相比2 因子模型和单因子模型,3 因子模型的各项拟合指标均优于二者并符合相关要求。此外,所有观测变量的标准化载荷系数均大于0.6,并且全部通过了t 检验(p<0.001),且各题项的误差均显著小于0.7。综上所述,在3 维度模型中,观测指标与假设模型的拟合程度符合要求,说明该模型的结构合理,零工工作者感知算法控制量表的构念效度得到样本二数据的验证和支持。
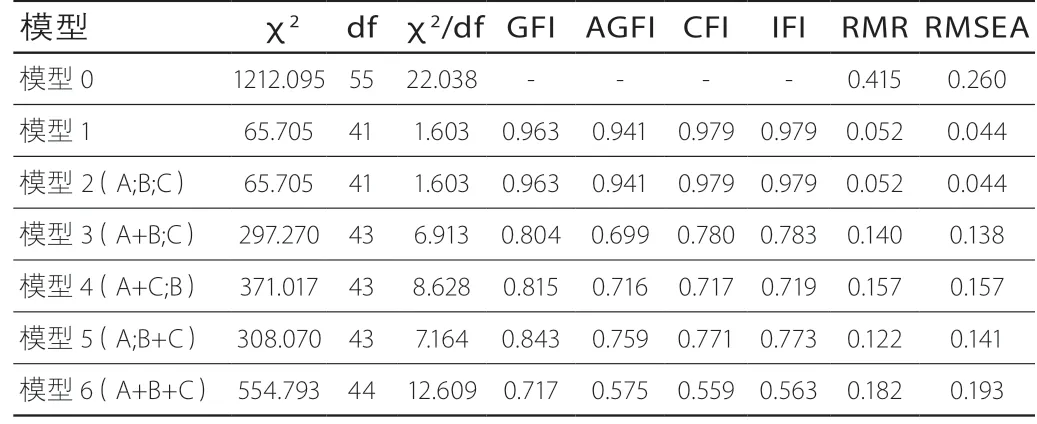
表4 验证性因子分析拟合优度指标结果
4.结构效度检验
结构效度是指一个测验实际测到所要测量的理论结构和特质的程度,说明测验分数多大程度上能解释特定的心理特质,主要包括聚敛效度和区别效度。[36]首先,为检验量表的聚敛效度,本研究在验证性因子分析的基础上计算了组合信度(C R)和平均方差抽取量(AV E),仅通过检验其中之一,不足以证明量表的聚敛效度。[38]为此,本研究以C R 大于0.8 和AV E 大于0.5 为标准,检验已有量表的聚敛效度。结果表明,三个分量表的C R 分别为0.860、0.851 和0.860,AV E 分别为0.605、0.589 和0.673,均满足标准(见表5),因此,可以建立感知算法控制量表的内部聚敛效度。
进一步,本研究采取两种方法检验已有量表的区别效度。首先,本研究模型中3 个构成维度之间的标准化相关系数均小于各维度的AV E 的平方根(见表5),并且各维度之间具有显著的相关性,但相关性不强,均低于0.5,表明已有问卷的区别效度满足要求。[39]此外,前文在进行验证性因子分析时,模型拟合指数显示,3因子模型的各项拟合指数均优于其他因子模型的拟合度(见表4),表明量表各维度间具有理想的区别效度。至此可以判定,本研究开发的零工工作者感知算法控制量表具有较好的结构效度。
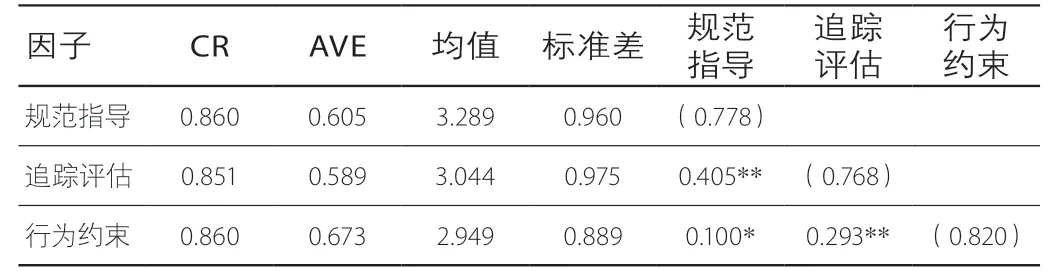
表5 结构效度检验结果
四、零工工作者感知算法控制对服务绩效影响的研究
服务质量始终是平台生存竞争的根本。[40]因此,平台希望利用新兴数字技术来实现价值共创和服务绩效创新,即通过设计一套由算法组成的控制系统,赋予人工智能算法指导、评估和约束的管理职能,自动化地确保零工工作者的服务质量。[9]进一步,在人机交互和协作过程中,零工工作者能否清晰地感知到平台算法控制策略的真实意图,决定了他们能否表现出平台所期待的工作态度和行为。本研究在开发零工工作者感知算法控制量表的基础上,围绕“算法技术的使用能否改善零工工作者的服务质量”这一理论界和实践界重点关注的问题,基于认知交互理论构建零工工作者感知算法控制对其服务绩效影响的理论模型,并结合平台终端的客观数据对此进行验证。
1.相关理论与研究假设
(1)零工工作者感知算法控制与服务绩效。认知交互理论(Cognitive Transactional Theory)认为,个体与环境的动态互动会塑造出不同的认知和评价,不同个体对于相同事件或情境的感知可能是不同的。[41]本研究基于个体感知视角开发了零工工作者感知算法控制的构念。具有不同感知水平的零工工作者,对于算法所传递的关于平台服务信息的感受、认知和评价不同,并进而表现出差异化的服务态度和行为。本研究提出,感知算法控制水平更高的零工工作者会更加遵循算法所传递出关于平台服务的信息,其服务绩效水平更高。这是因为,在服务情境下,一线服务人员的行为除了按照规定完成的角色内工作外,还可能会超出角色要求致力于提供更优质的服务。[42]任务绩效在服务情境下是指按照服务标准去满足顾客需求的行为,情境绩效在服务情境下是指以顾客为中心的角色外行为。[43]感知算法控制作为零工工作者所感受和认知到的算法所传递的平台服务信息,实际表明了工作者对平台制定和倡导的服务政策、标准及程序规范等内容的个性化、内在化理解,进而形成自己的判断,这些判断会影响他们随后的服务行为。例如,指导规范是零工工作者服务行为决策的依据,算法提供了服务角色期望的相关行为要求,指导或支持他们按照平台既定的规范完成或超额完成服务角色期望的任务,使得算法系统成为辅助零工工作者的技术伙伴;追踪评估是监督零工工作者劳动服务过程的基础,大数据驱动的算法能够实时追踪和记录与零工工作者服务绩效相关的信息,算法在与工作者交互的过程中及时反馈并评价他们的服务质量,从而帮助工作者对身处的服务情境及当前的服务状态有更清楚的了解,有助于及时纠正和改善自身的服务行为;行为约束是通过奖励或惩罚机制激励零工工作者,从而使他们实现既定目标并规范自身行为,对于算法设置的奖励和惩罚机制理解更加深刻的工作者会想方设法地努力达成诸如现金、评分等奖励,也会尽可能地避免受到如扣薪、封号等惩罚,因而越可能产生较高的服务绩效。据此,本文提出以下假设:
H1:零工工作者感知算法控制正向影响服务绩效
(2)挑战性压力评估的中介作用。基于认知交互理论的核心逻辑,[41]当个体面对压力时,可能会根据具体的情境和自身的认知感受做出差异化的评价,主要包括挑战性和阻碍性两类。一般而言,挑战性压力源虽然会给个体带来压力,但个体倾向于相信克服相关压力后自身利益会得到提升和巩固,进而会采取积极的策略予以应对。[44]与之相对的阻碍性压力源则会对个体工作目标的实现及职业的发展产生阻碍作用。[45]本研究认为,零工工作者感知算法控制可能会激发其挑战性压力评估,即零工工作者在与控制系统中的算法实时交互过程中倾向于将算法控制评定为挑战性压力,进而表现出更优质的服务行为,获取更高水平的服务绩效。因为控制系统中的算法传递出与平台服务管理规则相关的信息,这些信息实际上蕴含了算法针对零工工作者提出的具体要求。尽管这些诸如工作时间等要求会给零工工作者带来一定程度上的压力,但算法技术本身作为辅助零工工作者的技术伙伴会帮助他们努力实现既定的工作目标,并获取相应的回报或超额的奖励,算法控制带来压力的同时也会带来潜在的收益。因此,感知算法控制更高水平的零工工作者更倾向于将算法控制评定为挑战性压力源。例如,尽管规范指导提供了服务角色期望的相关行为要求,但这些行为期望并非不合理,相反,算法根据每位零工工作者的“画像”设置了个性化且具有挑战性的目标,[8]在零工工作者提供劳动服务并相应地实现这些目标的过程中,还通过数字技术赋能提高他们完成任务的效能感,使得工作要求更具意义。此外,算法实时追踪评估零工工作者的劳动服务过程同样也会给他们带来一定程度的压力,包括通过电子设备监控工作者的服务态度、通过电子系统持续跟进工作进度等。[46]但算法追踪这些任务信息,并通过分析评估后反馈给零工工作者,使其能够及时地了解自身的服务质量,从而更好地实现或超出既定目标。最后,算法巧妙地设置了奖励和惩罚机制来激励零工工作者提供优质的劳动服务。诸如冲单奖、全勤奖之类的奖励机制具有一定程度的挑战性,[47,48]这些挑战性的活动安排会激发工作者的内在动机。虽然他们需要付出更多的投入和努力才能实现,但实现后所获得的实际收益和自我成就感都会显著提升。进一步,由于个体认为挑战性压力源有助于提升收益或促进自身发展,因而能够激发个体的积极情绪和工作动机,主动地寻找应对压力或解决问题的策略以提升绩效水平。[41]因此,当零工工作者感知算法控制激发了他们对于挑战性压力源的认知评估后,为了获得优质服务质量带来的满足或超过预期的价值回报,他们会投入更多的资源提升或改善自身的服务行为,进而积极地影响其服务绩效水平。据此,本文提出以下假设:
H2:挑战性压力评估在零工工作者感知算法控制与服务绩效之间的关系中起中介作用
(3)职业类型(全职/ 兼职)的调节作用。从认知交互理论视角来看,个体特征差异也会导致他们对于相同事物的认知存在不同。[41]职业类型差异是零工工作者个体差异的主要表现之一,灵活自主的工作特征使得大量兼职工作者存在,不同职业类型(全职/ 兼职)的工作者在工作态度和行为上具有迥异的特征。本研究认为,一方面,平台对于全职、兼职工作者的派单方式、考核机制等管理内容具有差异化的设置,如网约车平台的派单系统会自动根据司机的在线时长判别其属于全职还是兼职,并会向全职司机进行派单倾斜;另一方面零工工作者自身对于职业类型(全职/ 兼职)具有不同的身份认知,这会导致他们在工作态度、动因和评价等方面存在较大差异。[49]如全职工作者更倾向于将这份工作视为自己的主业或本职工作,相较于兼职人员具有更高水平的职业认同。因此,相比于兼职工作者,全职工作者更能够将感知到的算法控制评估为有益于提供价值回报的挑战性压力源,进而会全身心地投入工作服务中去提升或改善自身的服务行为,获取更高水平的服务绩效。据此,本文提出以下假设:
H3:零工工作者感知算法控制与挑战性压力评估之间的关系受到职业类型(全职/ 兼职)的调节作用,这种关系对于全职工作者较强,对于兼职工作者较弱
综合上述假设,进一步提出一个整合性的被调节的中介效应假设:
H4:零工工作者感知算法控制通过挑战性压力评估影响服务绩效的间接关系会受到职业类型(全职/ 兼职)的调节作用,具体而言,这种间接关系对全职工作者的作用效果更强
基于上述分析,本研究构建的理论模型见图2。
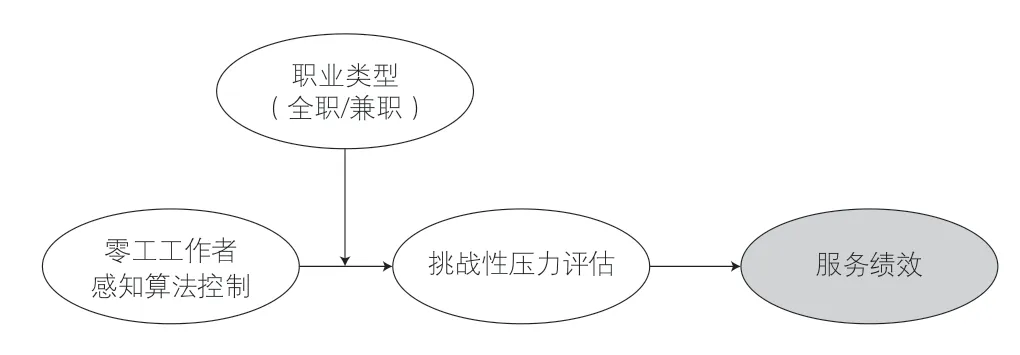
图2 理论模型
2.研究设计与样本特征
为尽可能地避免共同方法偏差的影响,本研究通过将问卷调查的一手数据与平台终端的二手数据相匹配,并采取纵向的数据收集方式获取数据。同时,考虑到调研对象的代表性,本研究选择广州地区一家成立近两年的网约出行平台作为样本选取来源,平台在线注册的网约车司机用户超过3 千人。在正式调研之前,由研究小组负责人与该平台的人力资源总监取得联系,介绍本次调研的概况和目的。经平台负责人的同意和支持,本研究将在保证用户数据隐私的前提下使用平台终端的司机数据。随后,秉着自愿参与的原则,由网约车司机的相关负责人招募志愿者。最终,包括256 名网约车司机同意参与本次调研(样本三)。
在变量测量方面,针对零工工作者感知算法控制的测量采用本文开发的包括11 个题项的量表,该量表在本研究中的Cronbach's α=0.820;挑战性压力评估的测量采用LePine 等开发的包括3 个题项的量表,[50]该量表在本研究中的Cronbach's α=0.850;结果变量服务绩效的测量由平台终端的算法系统自动结算,以服务分和出行分综合计算的口碑值分数来刻画和衡量。根据以往研究的建议,控制变量对年龄、性别、学历和日均在线时长进行控制。在实际操作方面,时点1 由网约车司机评价零工工作者感知算法控制、挑战性压力评估、职业类型(全职/ 兼职)及控制变量,共发放问卷256 份,实际有效回收247 份,有效率为96.48%;时点2 由平台数据终端的负责人结合志愿参与本次调研的网约车司机的系统账号提供其服务绩效的数据。最终通过数据匹配,获得有效数据247 份。
3.数据分析与研究结果
(1)共同方法偏差检验。结果表明,未获得单因子且首个主成分对变异解释为31.889%,低于40% 的标准临界值。此外,针对模型中所包含的变量进行验证性因子分析的结果显示,相比于单因子和两因子而言,三因子模型与实际数据拟合效果最佳(χ2/df=1.501,CFI=0.958,TLI=0.950,RMSEA=0.045,SRMR=0.049),显著优于其他竞争模型(见表6)。上述数据结果说明本研究的共同方法偏差问题并不严重。

表6 验证性因子分析
(2)描述性统计分析。本研究中个变量均值、标准差和相关系数如表7 所示,零工工作者感知算法控制与挑战性压力评估显著正相关(r=0.232,p<0.01),并与服务绩效显著正相关(r=0.248,p<0.01);挑战性压力评估与服务绩效显著正相关(r=0.242,p<0.01)。描述性统计分析结果与理论预期相符,为后续假设检验奠定了基础。
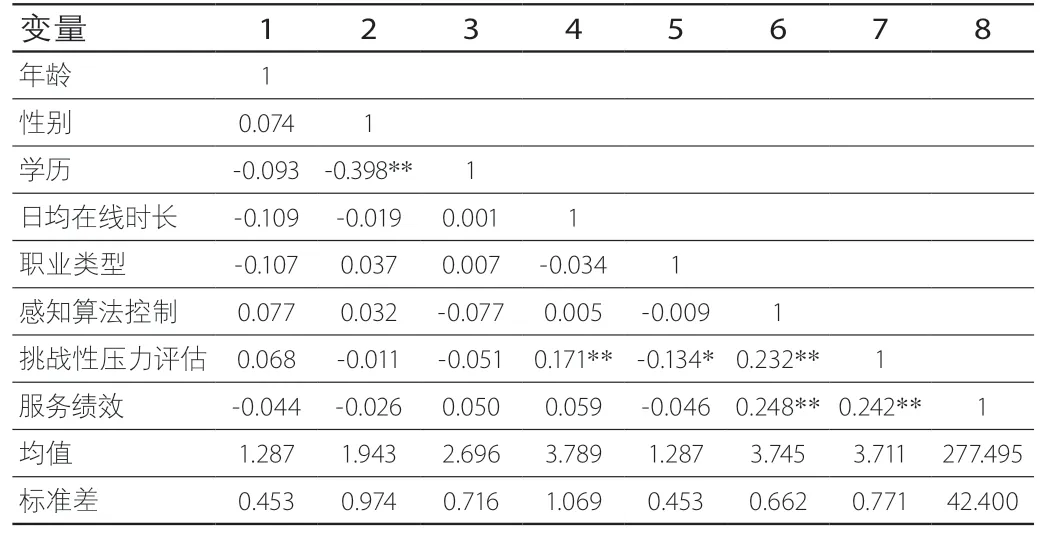
表7 描述性统计与相关性分析结果
(3)假设检验。为检验假设1,本研究将控制变量和多项式回归项对服务绩效进行多层线性回归分析。表8 中模型6 的结果表明,在控制了年龄、性别、学历和日均在线时长后,零工工作者感知算法控制对服务绩效具有显著正向影响(β=0.256,p<0.001),假设1 得到支持。
表8 中模型8 的结果表明,相比模型4,在加入中介变量挑战性压力评估后,零工工作者感知算法控制对服务绩效的影响从0.256 (p<0.001)变为0.212 (p<0.01),并且挑战性压力评估对服务绩效具有显著正向影响(β=0.198,p<0.01)。表9 中介效应分析结果表明,零工工作者感知算法控制通过挑战性压力评估对服务绩效的间接效应值为0.044,95% CI=[0.013,0.083],不包含0。因此,挑战性压力评估在零工工作者感知算法控制与服务绩效之间起部分中介作用,假设2 得到支持。

表9 中介效应分析结果
表8 中模型4 可知,零工工作者感知算法控制与职业类型(全职/ 兼职)的交互项显著影响挑战性压力评估(β=-0.127,p<0.05)。进一步检验发现,当零工工作者为全职类型时,感知算法控制对挑战性压力评估影响显著(β=0.306,p<0.001);当零工工作者为兼职类型时,感知算法控制对挑战性压力评估影响不显著(β=0.025,p>0.05),假设3 得到支持。此外,为更加清晰地观察零工工作者职业类型(全职/ 兼职)的调节作用,绘制简单斜率图(图3)。
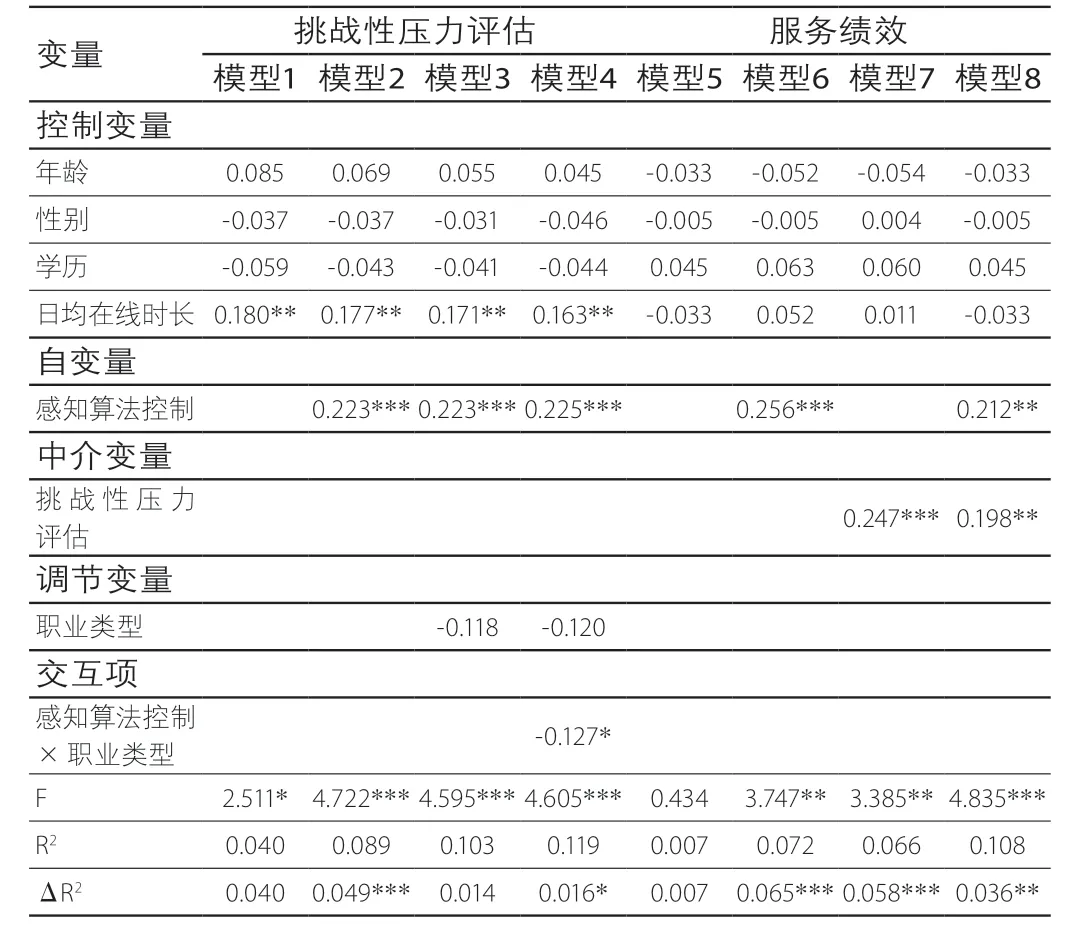
表8 层次回归分析结果
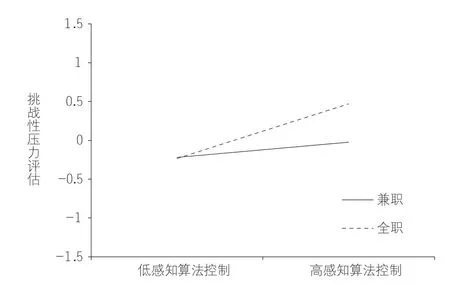
图3 职业类型(全职/兼职)的调节效应
为进一步检验假设4,运用Bootstrap 法进行有调节的中介效应检验(见表10)。表10 结果表明,当零工工作者为全职类型时,感知算法控制通过挑战性压力评估对服务绩效的中介效应显著(95%CI=[0.019,0.109]),间接效应值为0.061;当零工工作者为兼职类型时,感知算法控制通过挑战性压力评估对服务绩效的中介效应不显著(95%CI=[-0.043,0.051]),间接效应值为0.005,假设4 得到支持。

表10 有调节的中介效应分析结果
五、结论与讨论
1.研究结论和贡献
本研究首先基于扎根理论的编码结果,以零工工作者的主体视角开发出零工工作者感知算法控制这一构念的概念内涵与结构维度;随后,遵循规范的量表开发步骤编制出零工工作者感知算法控制量表,通过专家小组和零工工作者共同的内容效度评估、探索性因子分析、验证性因子分析及结构效度检验,最终构建出包含11个题项的零工工作者感知算法控制量表;最后,以认知交互理论为基础,实证探究了零工工作者感知算法控制对其服务绩效的影响机制。结果表明,零工工作者感知算法控制正向影响服务绩效,挑战性压力评估在其中起到部分中介作用,并且当零工工作者为全职类型时,上述关系更强。实证结果表明该量表具有较好的预测效度。
本研究具有如下贡献:第一,采用个体感知视角将算法控制的内涵概念化,不仅明晰了零工工作者感知算法控制的概念内涵,并且结合定性和定量的方法对上述构念进行层次划分,将规范指导、追踪评估和行为约束3 个维度构成零工工作者感知算法控制的完整内容,丰富了现有算法控制的理论框架。第二,首次开发并检验了零工工作者感知算法控制的量表,为未来研究提供了结构清晰的测量工具。此外,现有研究基于某一研究情境得出的定性结论的可靠性相对较低,限制了算法控制在个体微观领域研究的理论价值,成熟量表的开发有助于学者们进一步探究数字化背景下人机互动对个体态度和行为塑造这一具有前瞻性的话题。第三,借助本研究开发的量表,以认知交互理论为基础,实证检验了在几乎没有人工干预的工作环境下零工工作者感知算法控制是否及如何影响其服务绩效的作用机制和边界条件。现有定性研究大多指出,在持续的算法控制下,零工工作者会面临诸如工作—家庭冲突、工作不安全感及个体健康等负面影响,[4]本文的结论不仅以辩证的视角实证揭示了算法控制对零工工作者的积极面,还揭示出影响其服务绩效的重要情境因素,有助于理论界更加全面地认识算法控制对零工工作者的影响。第四,在实践层面,对个体而言,辩证地认知和评价具有规范指导、追踪评估和行为约束控制职能的算法有助于构建出和谐的人机协作模式,将算法系统视作工作过程中的技术伙伴能有效地提升服务绩效。对组织而言,技术工具解放了管理者的双手,在通过算法技术极大地提升组织效率的同时,不能忽视技术对零工工作者个体心理和行为的影响,需要致力于构建和谐的人与技术的关系。
2.研究局限和展望
本研究仍存在一定的局限性:第一,本研究选取网约车司机和外卖骑手作为典型的零工工作者样本,未来可以进一步考虑样本代表性的问题,采取随机抽样、滚雪球抽样等更严格的抽样方法,提高研究的外部效度。第二,本研究基于扎根理论的定性研究方法构建了零工工作者感知算法控制的结构维度,并将其内涵概念化,但文本分析的结果主要是通过研究成员讨论后主观编码所得,不可避免地受到主观偏见的影响,未来研究可以采用定性分析软件对访谈资料中的关键概念进行科学的提炼。第三,探索性因子分析结果显示部分符合理论解释且能反映零工工作者感知算法控制的题项没有充分涌现,说明扎根理论分析中对副范畴的提炼可能不准确,或是题项设计不准确。因此,未来研究有必要继续明确具有争议的条目,不断地修正和完善零工工作者感知算法控制量表。第四,本研究在针对零工工作者感知算法控制量表进行预测效度检验时,基于认知交互理论探讨了零工工作者感知算法控制与服务绩效之间的关系,具有一定的理论和实践价值。但本研究只揭开了零工工作者感知算法控制丰富研究内容的冰山一角,未来可以结合更加丰富的理论视角,例如资源保存理论、社会交换理论等,重点挖掘零工工作者感知算法控制对个体的心理和行为的微观作用机制,以及在其他边界条件下会产生何种不同的影响,进一步丰富零工工作者感知算法控制这一核心概念的理论阐释。
猜你喜欢
今日农业(2022年15期)2022-09-20
昆明医科大学学报(2022年3期)2022-04-19
音乐天地(音乐创作版)(2021年8期)2021-12-01
纺织科技进展(2021年5期)2021-07-22
成都体育学院学报(2021年1期)2021-07-16
纺织科学研究(2021年6期)2021-07-15
——致敬殡葬工作者
黄河之声(2021年2期)2021-03-29
英语文摘(2019年7期)2019-09-23
人民论坛(2019年14期)2019-05-29
福建基础教育研究(2019年7期)2019-05-28