
基于功率分层的孤岛直流微网协调控制策略
2022-01-23 04:20:38康家玉史晨雨王素娥白一锴
可再生能源 2022年1期
康家玉,史晨雨,王素娥,白一锴
(陕西科技大学电气与控制工程学院,陕西西安 710021)
0 引言
近年,以分布式电源为主要能量来源的微网发展迅速[1],[2]。直流微网由于结构简单,且不存在频率、相位、无功损耗等问题,而受到人们的关注[3]。母线电压稳定及系统功率平衡是微网稳定工作的前提[4],但分布式电源自身具有间歇性和不确定性,须配备相应的储能系统(Energy Storage System,ESS)作为平衡节点保证微网的稳定[5]。
下垂控制因高可靠性、低通信依赖等优点被广泛应用于微网协调控制与ESS功率分配中。文献[6]将母线电压变化率引入下垂系数中,实现了ESS功率合理分配。文献[7]利用不同类型的ESS针对性地平抑微网波动。文献[8],[9]设计了电压分层协调控制策略来保证微网的稳定运行,利用实时电压信号划分工作模式,各子系统根据运行模式采取相应的控制方式。文献[10]在电压分层的基础上,设置ESS下垂系数,在充电时正比于荷电状态(State of Charge,SOC),放电时反比于荷电状态,实现了ESS之间基于SOC的动态分配。但在母线电压波动时,易造成微网运行模式异常频繁切换,对微网的运行造成冲击。文献[11]设置电压滞环避免了模式异常切换,但又具有通信延迟。针对电压分层的不足,文献[12]提出了以功率信号为模式划分条件的变功率控制策略,并对比验证了其优势。文献[13],[14]均以荷-源功率差作为微网运行模式的切换依据,协调控制各子系统的运行方式。文献[15]中,ESS根据自身SOC与极限功率承担系统功率,但未考虑ESS功率分配超过最大功率的问题。文献[16]通过补偿蓄电池参考功率避免了功率越限。文献[17]设置了功率越限修正环节,但修正后SOC均衡无体现,且没有始终以电压特性运行的松弛终端为直流母线提供参考电压。
本文以荷-源功率差为判别条件,划分微网运行模式,规避不同模式间的异常频繁切换,实现微网内部功率平衡与母线电压稳定。采用并联型储能系统(Parallel-connected Energy Storage System,P-ESS)提升系统可靠性与抗扰动能力,利用下垂控制的U-P特性,实现了ESS基于自身功率调节能力平抑微网波动。针对自适应下垂控制可能存在ESS功率分配超过其最大功率的情况,设计了二次控制环节,在避免功率超限的同时降低了对于正常运行ESS的影响。
1 孤岛型直流微网结构
本文研究的孤岛直流微网主要由光伏系统(Photovoltaic,PV)、ESS及负荷单元组成。根据各子系统实时工作可将其分为松弛终端与功率终端[18],松弛终端可根据系统需求调整自身出力,而功率终端不具备调节能力。微网整体结构如图1所示。图中:PPV,PB-i,PL-1和PL-2分别为光伏输出功率、ESS-i输出功率、重要负荷功率和一般负荷功率;C为母线等效电容;UBUS为直流母线电压。
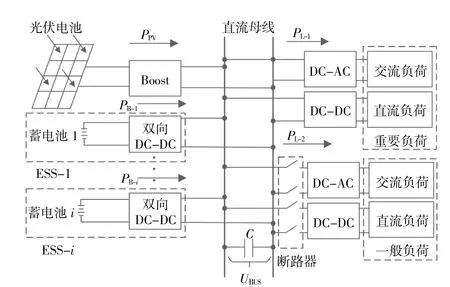
图1 孤岛型直流微网系统结构Fig.1 Structure of isoland DC microgrid system
记系统母线等效电容功率与系统损耗功率分别为PC和PS,规定ESS放电时为正,可得:

由式(1)可知,直流母线电压与系统功率任一指标稳定即可保证另一指标平衡,系统功率有冗余时会使母线电压升高,系统功率缺额时母线电压降低。
2 基于功率分层的孤岛直流微网协调控制
设计孤岛型微网控制策略时,须要同时考虑光伏的最大化利用和ESS的健康运行。即PV系统尽可能运行在MPPT模式;ESS在正常的SOC区间运行,并约束其输出功率[19]。为避免ESS深度充放电,设置蓄电池工作区间为20%~80%。当ESS-i的SOC越过充、放电阀值时将其切换为空闲模式,待放、充电信号到来时重新接入微网。
2.1 微网工作模式划分
定义光伏发电系统最大输出功率为PPVmax,ESS-i极限充、放电功率分别为PB-imax-c,PB-imax-d。为便于分析,本文忽略PC与PS的影响,规定系统净功率ΔP=PL-PPV。以ΔP与P-ESS最大平抑能力的关系为模式划分依据,划分情况如表1所示。
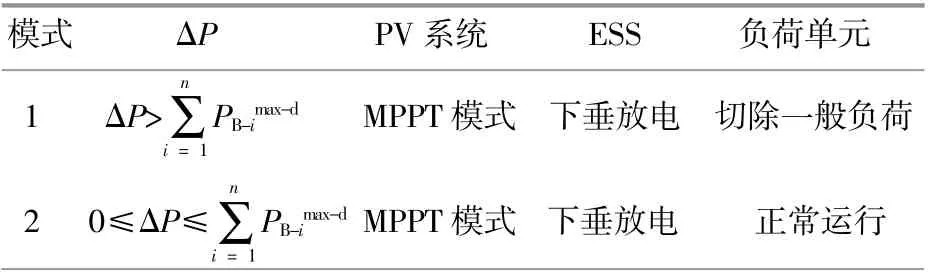
表1 孤岛型直流微网运行模式Table 1 Operation mode of isoland DC microgrid
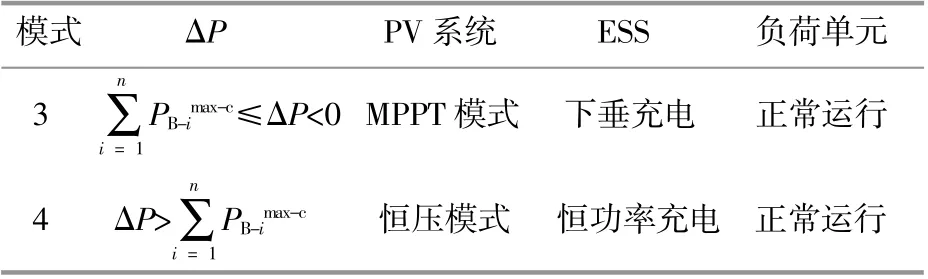
续表1
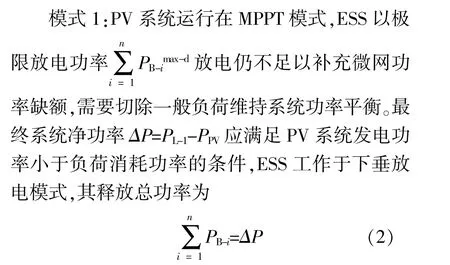
模式2:PV系统发电功率小于负荷消耗的功率,ESS不须要极限放电即可补充微网功率缺额。此时PV,ESS分别以MPPT、下垂放电方式运行,ESS放电功率为
模式3:PV系统发电功率大于负荷消耗的功率,ESS可吸收微网冗余功率。此时PV,ESS分别以MPPT、下垂充电方式运行,ESS吸收功率为

模式4:以MPPT模式运行的PV系统输出电能远大于负荷消耗功率,ESS不能完全吸收微网冗余功率,需要PV系统切换至恒压模式。此时光伏系统发出功率为

由模式划分情况可知:模式1,2,3下ESS作为松弛终端平抑系统波动,PV系统作为功率终端以最大功率输出电能;模式4下ESS无法平抑系统波动,PV系统切换为恒压模式作为松弛终端参与系统调节,此时ESS相当于功率终端,保证了微网在不同运行模式下,均存在松弛终端维持微网功率平衡。
2.2 微网各子系统运行控制
2.2.1 PV系统运行控制
PV系统作为微网的能量来源,在本文中具有MPPT与恒压两种运行方式。其中MPPT控制通过电导增量法(Incremental Conductance Method,INC)来实现,系统整体控制原理如图2所示。
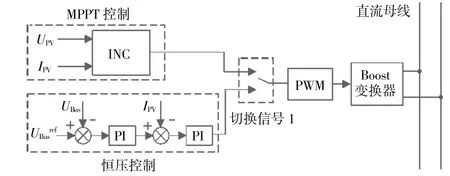
图2 PV系统运行控制Fig.2 Control of PV system
图中:UPV,UBus,UBusref和IPV分别为光伏电池输出电压、直流母线实时电压、直流母线电压参考值和光伏电池输出电流。在恒压运行方式下,由于存在电压闭环,PV系统可在调整输出功率时,使母线电压快速收敛于参考值。
2.2.2 ESS的运行控制
ESS作为平衡节点对微网稳定运行非常重要。由模式划分情况可知,ESS分为下垂、恒功率以及空闲3种工作方式。下垂控制作为实现ESS功率分配的典型方法,其表达式为
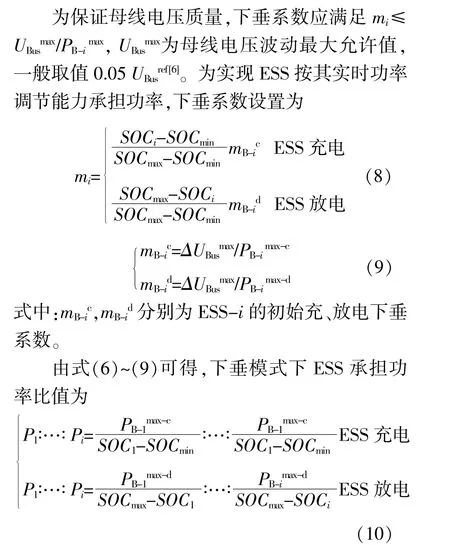
由式(10)可知:充电时SOC高且极限充电功率小的ESS功率调节能力低,SOC低且极限充电功率大的ESS功率调节能力高;放电时反之。实现了ESS基于实时功率调节能力决定自身出力,有效地避免了ESS过充过放。为了进一步提升母线电压质量,本文在电压外环中引入前馈补偿量δU,以间接补偿电压偏差,记PI控制器传递函数为GΔU,补偿原理的表达式为

工作于恒功率与待机方式下的ESS均采用电流单环控制,ESS整体运行控制原理如图3所示。
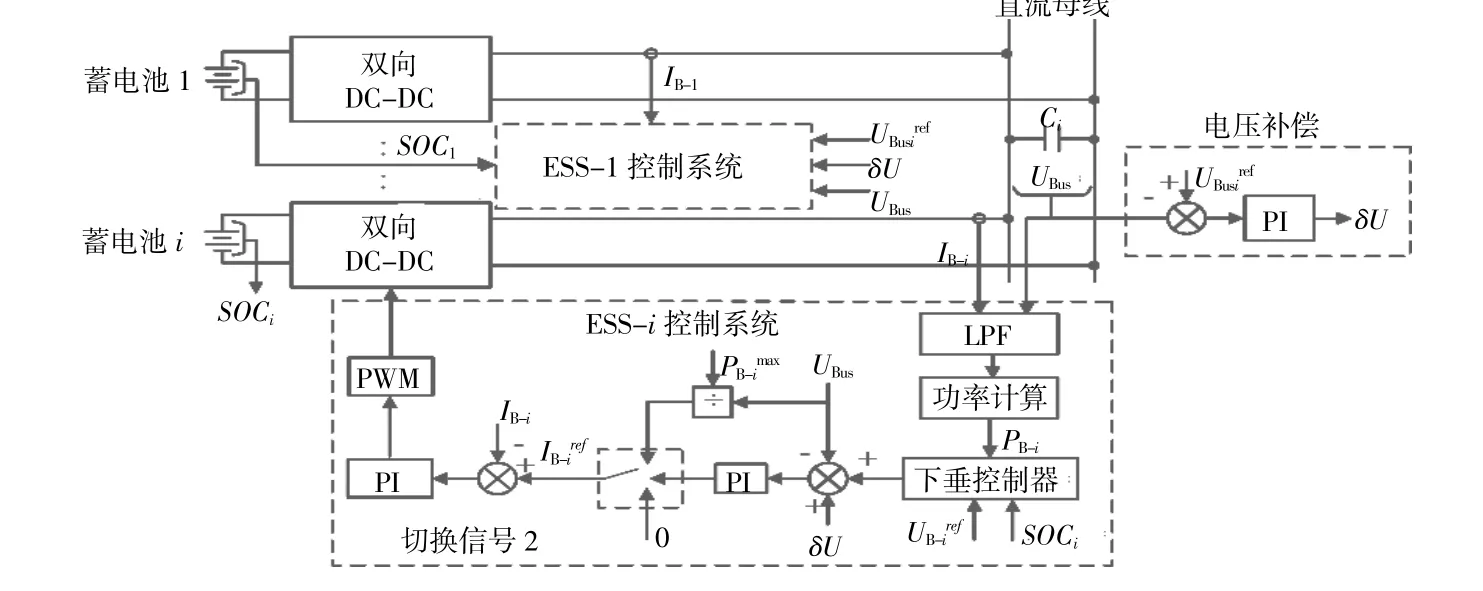
图3 ESS运行控制Fig.3 Control of ESS
图中:IB-i,IB-iref分别为ESS-i输出电流与输出电流参考值。当ESS在下垂方式运行时,下垂控制器产生的参考电压经过前馈补偿,作为电压外环的给定值,使ESS实时追踪电压给定并调整输出功率。
2.2.3 负荷单元运行控制
负荷单元在微网运行控制中始终作为功率终端。模式1下,通过断路器切除一般负荷以保证重要负荷供电不受影响,其余模式下将一般负荷重新接入系统。负荷单元控制原理如图4所示。
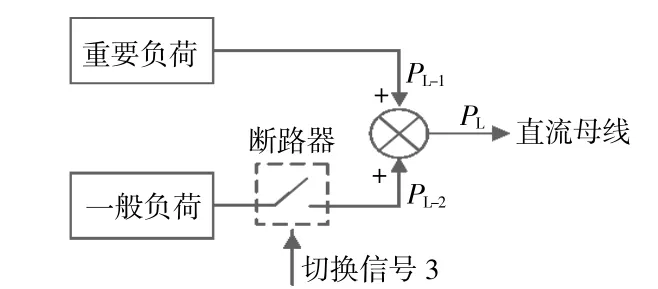
图4 负荷单元的控制Fig.4 Control of load unit
2.3 微网的二次运行控制
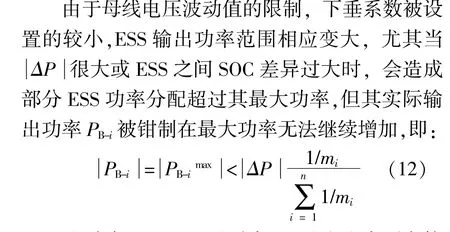
此时式(7),(10)不再成立,无法达成预定控制目标,也对系统的稳定运行造成影响[11],[16]。
本节设置功率修正环节对功率分配超限ESS进行二次控制,可实时检测是否存在ESS功率分配值越过其最大充放电功率,出现这种情况时功率修正环节动作,只须将超限ESS由下垂模式切换为最大功率输出模式,其余ESS仍然按照下垂系数进行功率分配,保证系统稳定性的同时避免影响其余ESS正常充放电。以模式2时ESS运行曲线来说明功率修正环节运行机理,如图5所示。P-ESS由3组ESS构成,忽略SOC短时间内变化,ESS-2,3最大功率相等均表示为PB-2max-d。图中,ESS-1,2,3在下垂放电模式下的初始运行曲线分别为1,2,3,无最大功率限制与电压前馈时ESS-1,2,3分别工作于A,B,C点。可知ESS-3功率分配P3大于其最大功率,考虑最大功率后ESS-3会被钳制在CLimit点,输出功率为PB-2max-d,此时系统功率缺额(P3-PB-2max-d),ESS-1,2须沿各自下垂曲线移动至A′,B′点进行二次下垂分配以补偿系统功率缺额。可知ESS-3输出电压异于其余ESS,会导致母线电压质量与系统运行稳定性降低。此时功率修正环节动作,将ESS-3由下垂模式切换为恒功率模式,其工作点将从CLimit下降至C′以适应母线电压,但母线电压UBus-2相比参考电压产生了较大偏差,电压前馈环节的存在将调节母线电压至参考电压UBusref,ESS-1,2下垂曲线变为1′,2′,ESS-3工作点随之上升,最终ESS工作点稳定于A″,B″,C″。随着工况的改变,ESS-3功率分配不超过最大功率时退回下垂模式。即:
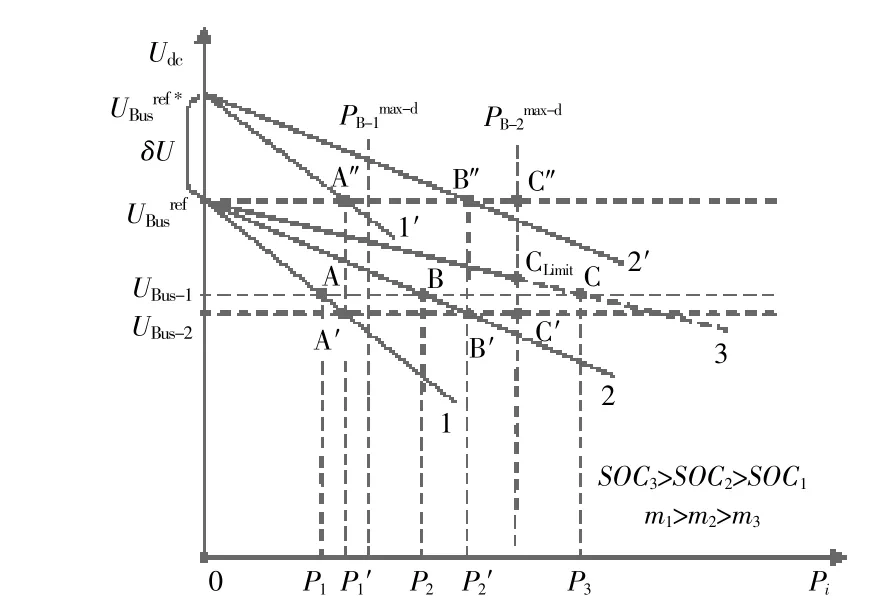
图5 ESS运行曲线Fig.5 Operation curve of energy storage system
整个过程中避免了因ESS-3功率分配超限造成的不利影响,同时ESS-1,ESS-2还能按照其设定功率配比平抑波动。二次下垂分配后,如ESS-1或ESS-2功率分配超过其极限功率,须要功率修正环节再次动作调整其工作方式,在最极端情况下仍能保证至少存在一组ESS以下垂特性运行。恒功率运行方式下的ESS与MPPT运行方式下的PV系统,或负荷单元的作用相同,只作为功率终端而不再给微网母线提供电压支撑,此时由下垂运行模式的ESS发挥电压松弛作用。一般情况下,ESS-i功率修正环节动作条件为

式中:∑PBmax,∑(1/mB)分别为工作于恒功率方式的ESS总极限功率和工作于下垂方式ESS下垂系数的倒数之和,两者均不计ESS-i自身功率。
经过二次控制后,微网整体的控制逻辑如图6所示。
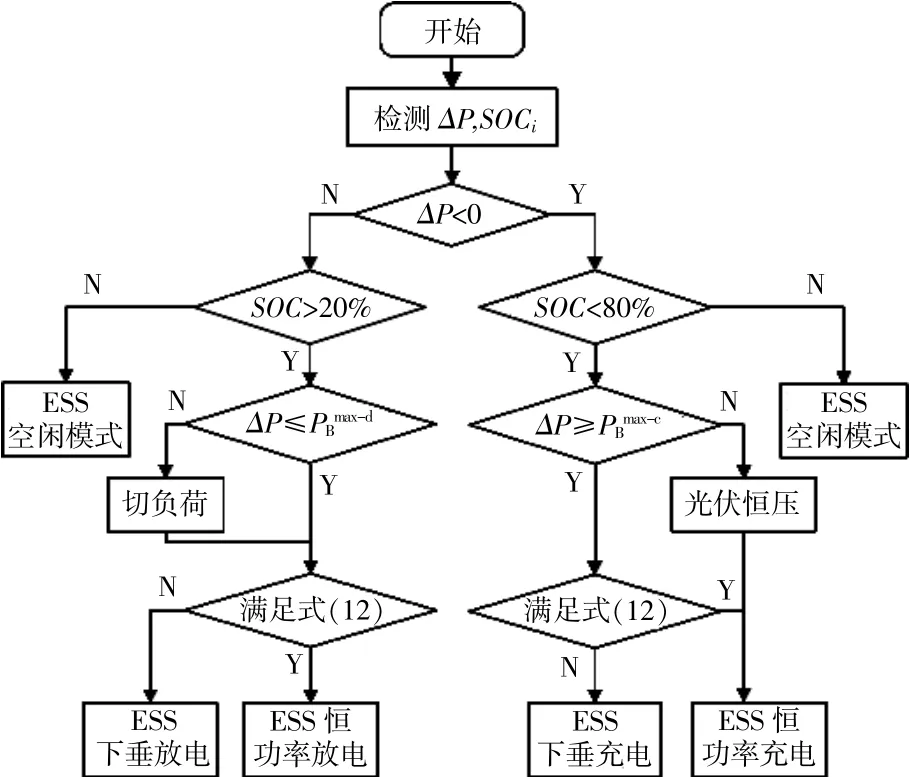
图6 系统整体控制逻辑Fig.6 System overall control logic diagram
3 仿真分析
本文在Matlab/Simulink中搭建了仿真模型。其中PV最大输出功率为6 kW,负荷包含3 kW重要负荷和2 kW一般负荷,P-ESS中包含3组ESS,容量均为5 A·h,极限功率分别为±1.5kW,±1.5 kW和±1 kW,默认初始SOC为40%,60%和60%,设置母线电压参考值为380 V。通过光伏出力的改变、负荷变化及ESS运行方式的切换模拟系统波动,在不同工况下进行仿真验证。
3.1 ESS正常工作情况
该工况下,PV系统恒工作于MPPT模式,其输出功率在0~1 s,1~2 s和2~3 s内因光照及温度变化分别为6,4 kW和0.5 kW,各子系统仿真波形如图7所示。
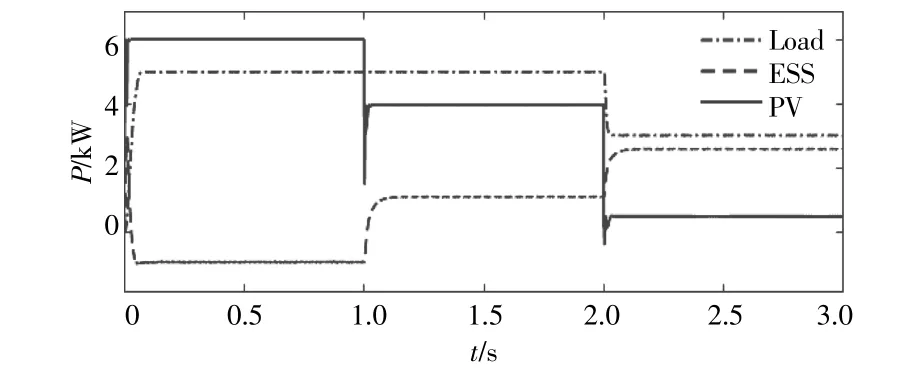
图7 微网子系统输出特性Fig.7 Output characteristics of microgrid subsystem
由图7可知,在0.05 s时系统达到稳定,0.05~1 s内系统运行于模式3。t=1 s时,随着PV出力减少,ESS放电补充系统功率缺额,系统运行于模式2。t=2 s时,系统功率缺额超出ESS调节范围,须要切除一般负荷,系统工作于模式1。各子系统均能快速根据系统功率的变化切换自身工作方式以平抑波动。
分别采用传统下垂控制和本文自适应下垂控制后,ESS之间的功率分配及SOC变化情况分别如图8,9所示。
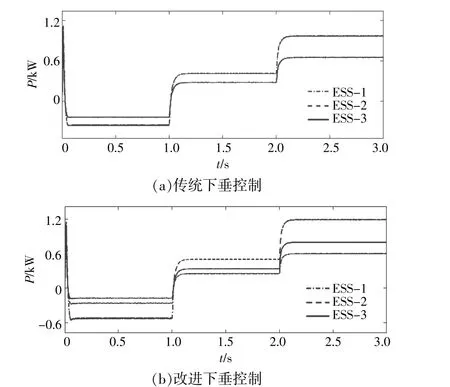
图8 ESS之间的功率分配Fig.8 Power sharing among ESS
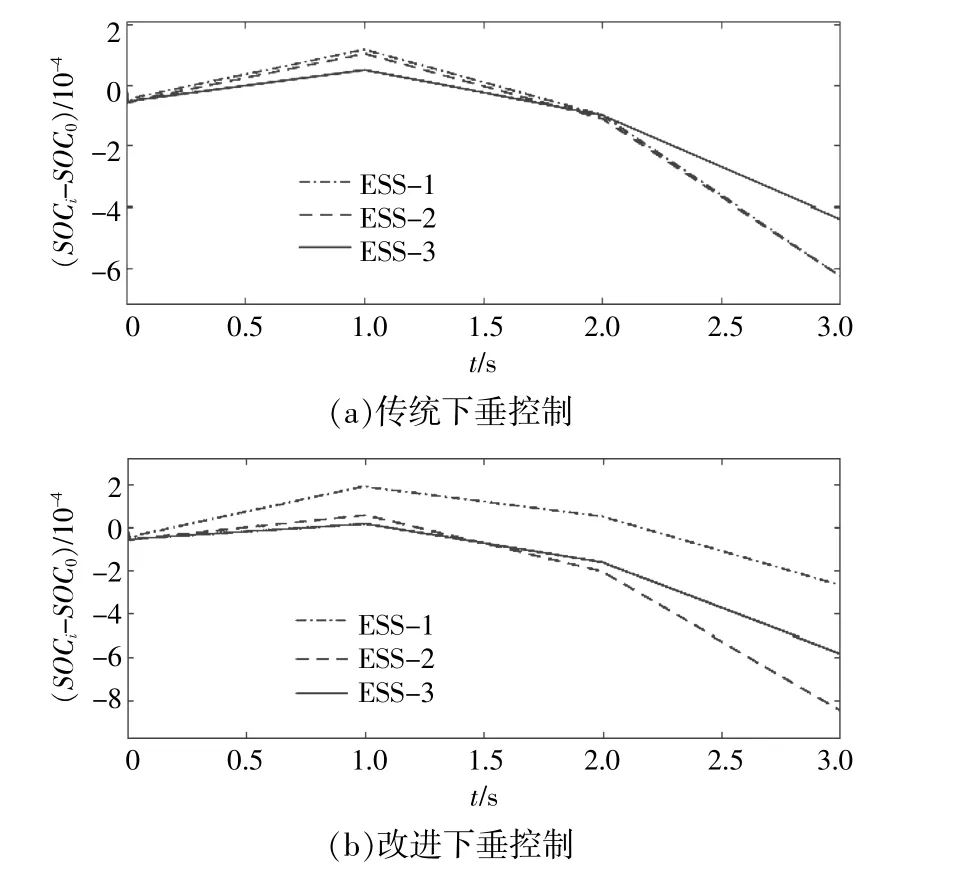
图9 ESS荷电状态变化情况Fig.9 Change of ESS state of charge
由图8,9可知,传统下垂控制中ESS依据其最大功率进行功率分配,无法顾及ESS的SOC,易造成ESS的过充过放。而本文所用下垂控制将实时SOC引入其中,实现了基于实时功率调节能力充放电,有效地避免ESS过充过放。
运行过程中母线电压变化如图10所示。
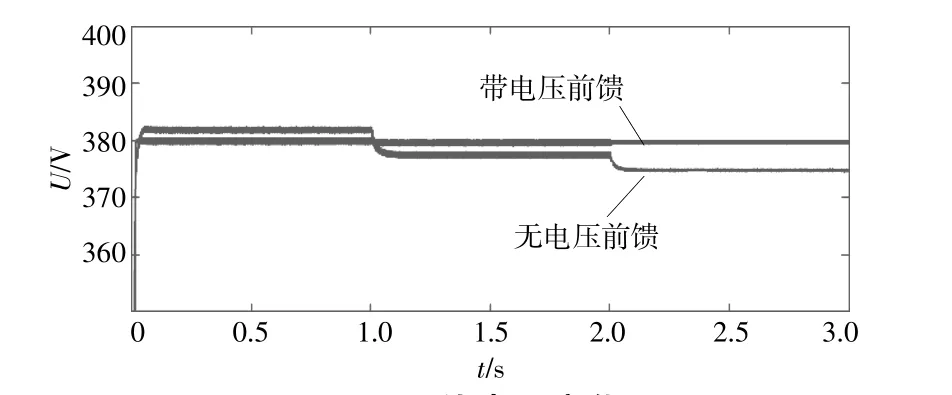
图10 母线电压变化Fig.10 Changes in bus voltage
本文控制策略在未引入电压前馈环节时,ESS充、放电时分别会抬高或降低母线电压,且随着ESS承担功率的增加,母线电压偏差相应变大,而在引入电压前馈后,母线电压偏差得到有效补偿。
3.2 ESS功率分配超限情况
变更ESS初始SOC分别为35%,50%,65%。其中PV在0~4 s均工作于MPPT模式,在0~1 s,1~3 s和3~4 s输出功率分别为5.2,6 kW和2 kW,重要负荷在t=2 s时接入系统。分别用文献[17]与本文所提控制策略进行对比验证,两种控制策略子系统输出特性相似且模式划分情况相同,仿真结果如图11所示。
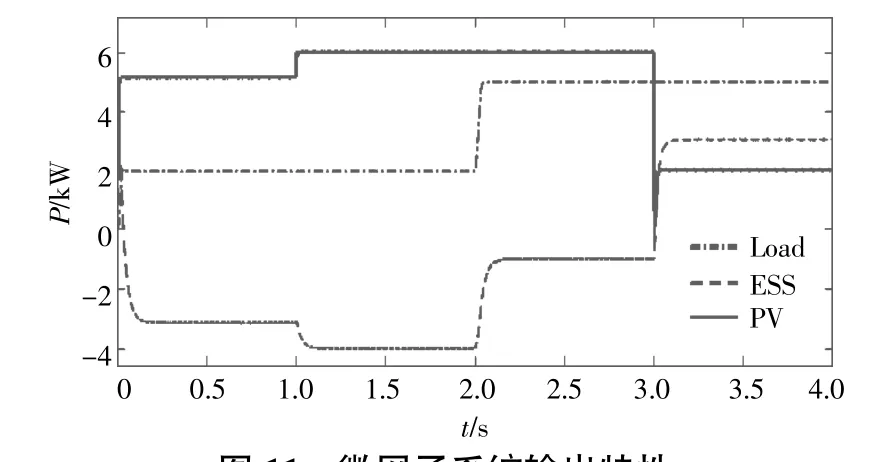
图11 微网子系统输出特性Fig.11 Output characteristics of microgrid subsystem
图11中,系统在0.15~3 s运行于模式3,3~4 s运行于模式2,ESS在0.15~1 s,1~2 s和2~3 s分别吸收3.2,4 kW和1 kW功率,3~4 s释放3 kW功率。运行过程中内部功率始终保持动态平衡,两种控制策略中ESS之间承担功率情况如图12所示。
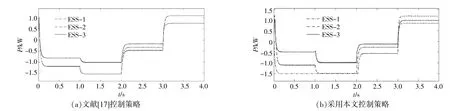
图12 ESS之间的功率分配Fig.12 Power sharing among ESS
系统约在0.15 s达到稳定,在0.15~1 s内,两种控制策略中的ESS-1功率分配均超过极限功率,文献[17]控制策略中修正环节动作,3组ESS按照极限功率比值吸收冗余功率,ESS-2,ESS-3也失去根据自身SOC决定吸收功率的能力。而本文所提控制策略将ESS-1退出下垂模式,并以1.5 kW恒功率充电,ESS-2,ESS-3仍在下垂模式下依据SOC与极限功率吸收冗余功率。t=1 s时,继续减小,在文献[17]控制策略下,3组ESS均以极限功率充电;本文控制策略中,ESS-2功率分配超限,二次控制环节动作将ESS-2也切换为恒功率充电方式,ESS-3作为唯一松弛终端以电压特性运行稳定母线电压。在t=2 s时,随着重要负荷接入系统,两种控制策略的二次调整环节均退出调节,3组ESS均按照初始设定功率比出力。t=3 s时,两种控制策略的二次控制环节均动作以避免功率分配超限,文献[17]3组ESS还是以极限功率比补充微网功率缺额,而本文控制策略中两组功率未超限单元仍以初始下垂比例释放能量。
本文所提控制策略最大限度保证了ESS之间根据自身功率调节能力决定自身出力,整个运行过程中,母线电压变化情况如图13所示。
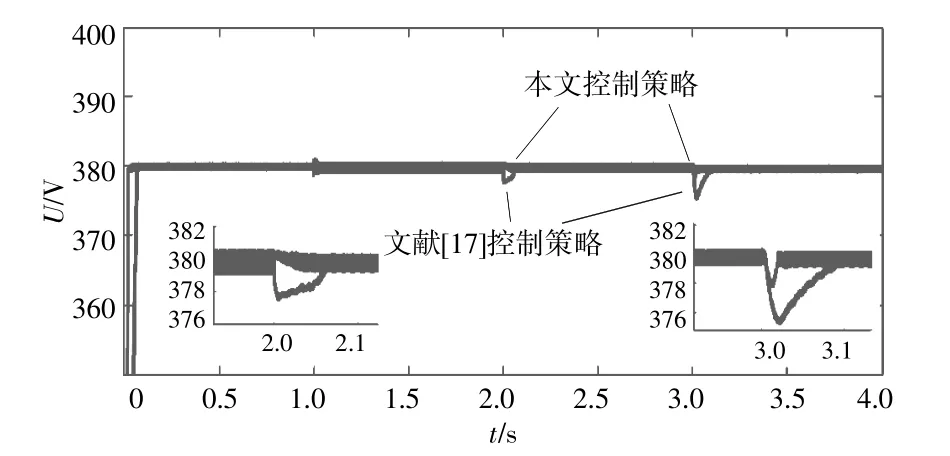
图13 母线电压变化Fig.13 Changes in bus voltage
由图13可知,两种控制策略均能保证母线电压稳定在参考值附近,但本文所提出控制策略恒存在以电压特性运行的松弛终端稳定母线电压,在系统功率突变时母线电压波动较小,提升了微网的鲁棒性。
3.3 部分ESS退出运行情况
PV在0~4 s均工作于MPPT模式,在0~2 s,2~4 s内输出功率分别为3,6 kW。ESS-2在t=1 s时退出运行,t=3 s时重新接入运行,微网各子系统仿真波形如图14所示。
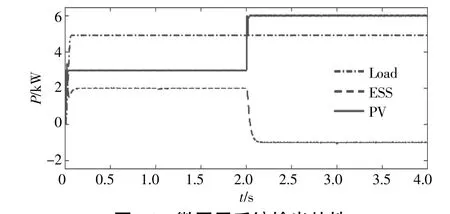
图14 微网子系统输出特性Fig.14 Output characteristics of microgrid subsystem
由图14可知,在0.15~2 s,2~4 s时系统分别工作于模式2,3,整个运行过程中系统内部功率始终保持平衡。
运行过程中各ESS功率分配情况如图15所示。
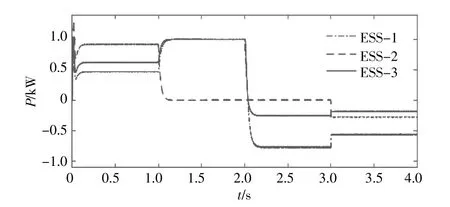
图15 ESS之间的功率分配Fig.15 Power sharing among ESS
由图15可知,0.15~1 s运行于下垂放电模式。在t=1 s时,ESS-2故障退出运行,其余ESS仍可平抑波动,但ESS-3的分配功率超限,二次控制环节动作将ESS-3切换为恒功率放电模式。t=2 s时,PV输出功率增加,ESS-1,3工作于下垂充电模式。ESS-2在t=3 s时重新接入系统,3组ESS按其下垂系数进行功率分配。
运行过程中母线电压变化情况如图16所示。由图16可知,储能系统退出或加入系统对母线电压影响较小,在保证系统稳定的同时实现ESS的功率动态分配,表明了此策略可实现微网“即插即用”特性。
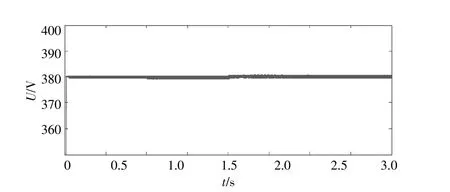
图16 母线电压变化Fig.16 Changes in bus voltage
4 结束语
本文提出基于功率分层的孤岛直流微网协调控制策略,正常运行下以ESS主导平抑系统功率波动,超出ESS调节范围后PV或负荷参与系统调节。微网内部功率始终保持动态平衡,且任何工作模式下均存在以电压特性运行的松弛终端控制母线电压稳定。仿真算例表明,带电压前馈的自适应下垂控制可实现ESS基于实时功率调节能力平抑微网波动并且补偿母线电压偏差,避免ESS过充过放,设计的二次控制环节有效地解决了ESS功率分配超限问题,并保证其余ESS仍可按照自身功率调节能力平抑系统波动。验证了本文所提控制策略的有效性与优越性。
猜你喜欢
通信电源技术(2016年6期)2016-04-20 06:21:15
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年21期)2015-04-09 11:52:16
电测与仪表(2015年11期)2015-04-09 11:46:14
电测与仪表(2015年5期)2015-04-09 11:30:46
电测与仪表(2014年12期)2014-04-04 12:10:18
电测与仪表(2014年17期)2014-04-04 11:56:50
燕山大学学报(2014年2期)2014-03-11 15:28:26
电机与控制应用(2013年9期)2013-11-21 08:00:04
