多信道传播模型下C-V2X模式4通信建模与性能分析
2022-01-23 03:42陈万培杨钦榕
无线电工程 2022年1期
高 绅,韩 恒,陈万培,张 涛,杨钦榕
(扬州大学 信息工程学院,江苏 扬州225009)
0 引言
车联网(Vehicular Communication Networks,VCN)作为智能交通系统的一部分,能够提高道路安全和交通效率。Cellular Vehicle-to-Everything(C-V2X)作为一种新兴的、应用在车联网领域上的通信技术,其主要目的是将移动车辆与其他终端或用户进行信息连接[1]。3rd Generation Partnership Project(3GPP)发布R14标准规范支持基础V2X通信的LTE标准的演进,这种演进通常包含C-V2X,Cellular V2X,LTE-V和LTE-V2X[2]。C-V2X与IEEE 802.11.p标准相比,C-V2X可以更好地支持车辆之间使用PC5接口的直连通信。R14版本引入2种新的专为Vehicular to Vehicular(V2V)通信设计的通信模式(模式3和模式4),这2种模式与R12版本Device-to-Device(D2D)通信技术中的模式1和模式2有很大不同[3]。模式1和模式2使用LTE侧链协议延长电池的使用寿命,而模式3和模式4两种模式的提出背景是为了满足V2X高可靠性、低延迟和网络可伸缩性等方面的需求。在模式3中,蜂窝设备用于选择并管理车辆用于V2V直接通信的无线资源。在模式4中,车辆可以在无任何蜂窝设备的支持下自主选择和管理无线资源,满足实际应用场景中对低延迟和高可靠性的要求,在无蜂窝网络覆盖的区域内,模式4与V2V的安全应用高度相关。
文献[4-5]对模式3和模式4性能进行比较,发现在网络覆盖不稳定或无网络覆盖时,模式4仍为最好的通信模式选择方案。文献[6]通过实验分析模式4资源分配的分组传输率,证实了模式4的资源分配算法比随机资源分配方式具有明显的性能优势。在文献[7]中将模式4与受控资源分配方案进行比较。实验结果表明,在一定距离内,模式4的资源分配方式更优。文献[8]将模式4自主资源分配与多种资源分配方案进行比较,研究不同方案下的资源分配阻塞率和错误率。文献[9]提出使用组合马尔科夫链分析模型来评估C-V2X不同调度方案的性能。文献[10]对C-V2X模式3进行建模分析,并将其与IEEE 802.11.p进行可扩展性比较。值得注意的是,以上研究大都关注模式4资源分配算法与不同资源分配方案的性能比较,且都是建立在简单的仿真环境中。文献[11-12]详细分析了LTE-V模式4在高速公路场景中不同行驶速度下的性能,但研究方法仍局限于特定的几个方面以及单个或少量的参数上。
分析模型作为一种重要的评估工具,可提供各种参数和条件下的性能信息[13-14]。为了克服以往工作在分析模型上的不足,本文借鉴文献[6]提出的半双工传输引起的错误、接收信号功率低于检测功率阈值引起的错误、传播效应引起的错误和分组冲突引起的错误这4种不同类型的C-V2X模式4性能分析参数,使用数学公式量化这4种性能分析参数,结合传输功率水平、传输信道模型和调制和解码方案等传输参数,设计更为完备的分析模型,探索参数的影响并通过调整参数来进一步提升性能的可能性和可靠性。
1 C-V2X模式4
1.1 物理层
C-V2X模式4使用单载波频分多址技术(SC-FDMA),支持10,20 MHz带宽传输。每个信道划分为子帧、资源块和子信道3部分,其中子信道定义为同一子帧中的一组资源块。每个用于传输数据和控制信息的子信道资源块根据数据分组的大小和使用的调制和编码方案的变化而变化。数据分组通过物理侧链共享物理侧链控制信道在传输块中传输,而控制信息通过物理侧链控制信道在侧链控制信息中传输。传输块包含一个完整的数据分组(如信标或合作意识信息),可以占用一个或几个子信道,并且与其关联的侧链控制信息必须始终在同一子帧中传输。侧链控制信息占用2个资源块,该侧链控制信息包括用于传输传输块的调制和编码方案、节点信息和已经用于半永久静态传输的资源保留间隔等信息,其他节点只有正确接收侧链控制信息才能够接收和解码传输块。用于区分传输块和侧链控制信息传输的资源块如图1所示。

图1 C-V2X:子帧、子信道、选择和感知窗Fig.1 C-V2X:sub-frames,sub-channels,selection and sensing windows
1.2 基于感知的半静态调度协议
在C-V2X模式4中,车辆可以在无蜂窝设备的帮助下自主选择资源,为了实现这个目的,3GPP R14版本中使用基于感知的半静态资源调度协议选择子信道。车辆为选定的子信道预留了与重选计数器数量相等的连续传输的数据包。每当必须保留新的子信道,以及每100 ms发送一次数据包时,重选计数器就会在5~15随机重新设置[12],每次发送数据包后,重选计数器递减1,当值为零时,以1-P的概率选择是保留资源还是重新选择资源。通常P可以设置为0~0.8的任意值,P值越高,表明车辆越有可能长时间保留其选定的资源。车辆选择和保留资源所遵循的过程如下:
(1) 当必须选择新资源时,车辆V必须在一个选择窗口内预留新的资源,选择窗口是数据包生成时间和定义的最大等待时间(≤100 ms)之间的时间窗口。在选择窗口车辆V选择想要保留的候选单子帧资源(Candidate Single-Subframe Resources,CSR)。
(2) 车辆V连续检测感知T时刻之前的1 000子帧(如图1所示),此时,车辆V会创建一个列表L1,记录包含以下2个条件的所有CSR:① 车辆V已经在感知窗口中正确接收来自另外一辆车的SCI,表明其他节点将利用该资源进行下一次传输;② 车辆V排除资源块RB上的平均参考信号接收功率(Reference Signal Received Power,RSRP)测量值高于给定阈值的资源。RSRP为可配置的参数。执行步骤②后,L1必须在选择窗口中至少包含20%的选择窗口资源总户数。如果不是,则迭代执行步骤②,直到实现20%的目标,并且在每次迭代中RSRP阈值增加3 dB。
(3) 车辆V创建候选列表L2,其中包括L1中低于平均接收信号强度指示(Received Signal Strength Indicator,RSSI)的资源,车辆V随机选择列表L2中一个CSR,根据带宽分配资源计数器,并将其保留用下一次重选计数器传输。
2 分析模型参数
C-V2X模式4的操作和性能取决于文中的一组参数。本节讨论这些参数,并说明它们对C-V2X的操作和性能的相关性和影响。
2.1 传输错误
文献[6]提出了4种不同类型的C-V2X传输错误:半双工传输引起的错误δHD、接收信号功率低于检测功率阈值引起的错误δSEN、传播效应引起的错误δPRO和分组冲突引起的错误δCOL。建立分析模型,假设车辆Vt是发送方,车辆Vr是接收方,2车之间的距离为dt,r,可以认为,如果不出现任何已知的错误类型(上述4种错误模型),则车辆Vr可以正确接收数据分组。由于错误具有排他性,使用分组传输率PDR描述这种可能性:
PDR(dt,r)=(1-δHD)·(1-δSEN(dt,r))·
(1-δPRO(dt,r))·(1-δCOL(dt,r)),
(1)
归一化后,PDR可以表示为:
(2)
式中,
(3)
(4)
(5)
(1-δPRO(dt,r))·δCOL(dt,r),
(6)
(7)
(8)
2.1.1 半双工传输引起的错误δHD
由于半双工效应,2个车辆节点有一定的概率选择相同的子帧来传输TB,会导致接收车辆无法接收TB,该概率取决于2个车辆节点每秒传输的数据包数量λ:
(9)
2.1.2 接收信号功率低于检测功率阈值引起的错误δSEN
考虑路径损耗和阴影对信号衰落的影响,以及阴影衰落符合正态分布,那么接收信号功率Pr也符合正态随机分布,使用均值为0且方差为σ的对数正态随机分布对收信号功率Pr进行建模。考虑路径损耗和阴影对信号衰落的影响,接收信号功率Pr可以表示为:
(10)
式中,Pt为发射功率;PL为路径损耗;PSH为阴影,因为阴影衰落是符合正态分布的,且发射节点和接收节点距离给定处,PL为定值,那么Pr整体也符合正态分布的。使用均值为0且方差为σ的对数正态随机分布对其建模,则接收信号功率的概率分布函数(PDF)可以表示为:
(11)
则δSEN为:
(12)
式中,PSEN为检测功率阈值。把式(10)带入式(12),则:
(13)
式中,Pt为发射功率;PL为路径损耗;PSH为阴影;erf为错误函数。
2.1.3 传播效应引起的错误δPRO
当接收的数据分组的信噪比低于感知信噪比阈值,会造成接收节点无法正确解码的错误,这种类型的错误只源于传播效应。该错误的产生取决于传输功率、检测功率阈值、噪声、传输距离和调制编码方案MCS[1]。在发射节点和接收节点距离给定的情况下,信噪比是常数,因此信噪比遵循和阴影相同的随机正态分布,假设接收节点的信噪比是一个随机变量(跟节点之间的距离有关),单位dB,表示为:
(14)
式中,n0为噪声功率。由式(10)可知,式(14)可以表示为:
(15)
同理,在发射节点和接收节点距离给定处,PL为定值,因此SNR遵循和阴影相同的随机分布。则SNR的概率分布函数可以表示为:
(16)
则δPRO可以表示为:
(17)
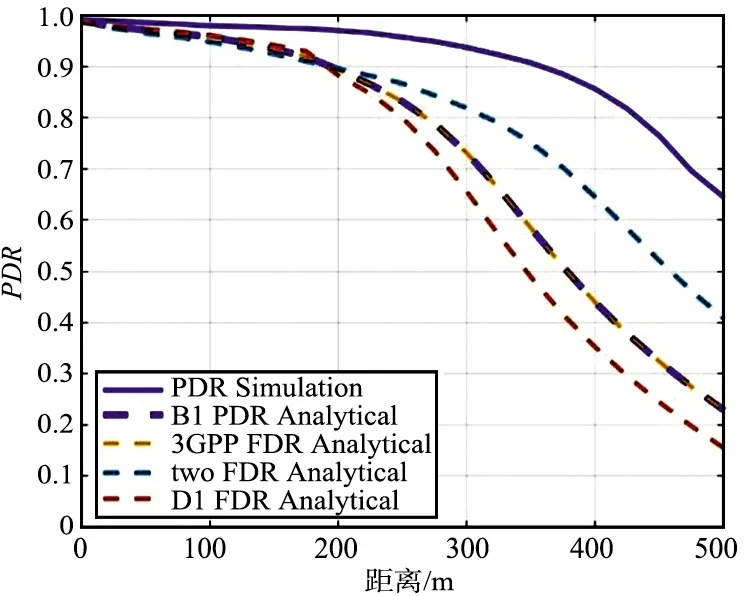
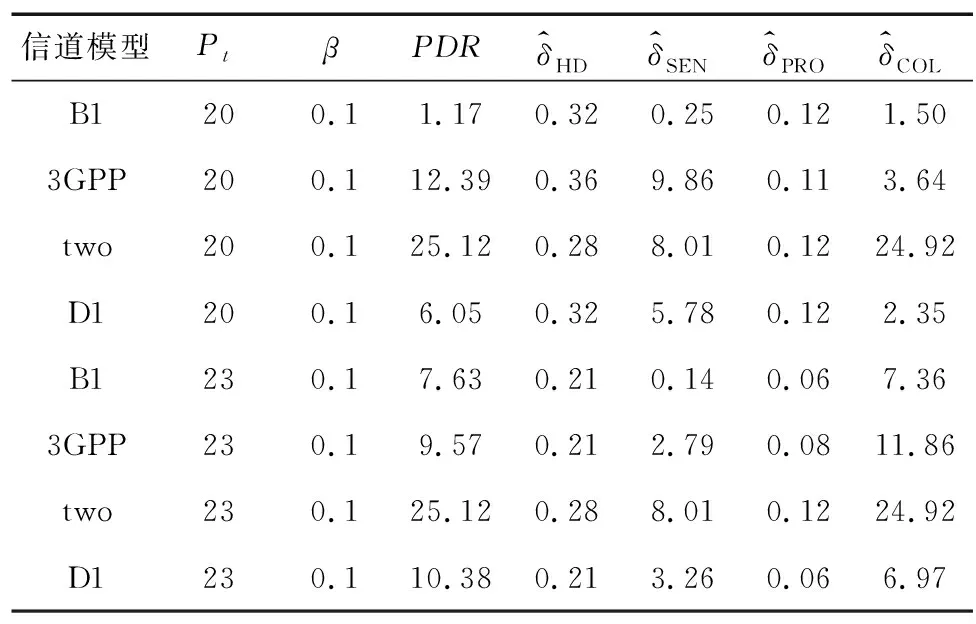
当Pr 2.1.4 分组冲突引起的错误δCOL 在实际信号传播场景中,由于其他车辆的干扰(信号功率与干扰和噪声的比值(SINR)不足)/碰撞(同一资源在相同子帧或相同子信道上传输),导致接收节点无法正确接收来自发射节点的数据分组,这种分组冲突引起的错误主要取决于C-V2X模式4的SPS方案的配置和操作,以及传输参数、传播、发射节点和接收节点之间的距离以及交通密度[6]。假设接收节点车辆接收到的其他车辆干扰信息等效于附加噪声,则接收节点的SINR表示为: (18) 式中,di,r为干扰节点和接收节点之间的距离;Pi为接收节点接收到的其他车辆干扰信息功率。SINR概率分布函数fSINR,dt,r(p)为: (19) 则pinterfere表示为: (20) (21) 式中, (22) τ为每个车辆必须使用同一资源进行传输的平均数,PSR(dt,i)=1-δSEN为分组检测速率,则PSR(dt,i)可以表示为: (23) 则δCOL可以表示为: (24) 式中,pinterfere为干扰车辆在接收节点上产生的干扰大于检测功率阈值的概率;psome为发射节点和接收节点使用同一资源传输的概率。 传输功率显著影响通信范围和车辆产生的干扰。原则上在信道负载较高时增加发射功率,在信道负载均衡时或者不高时降低发射功率是合理的。事实上,较低的低传输功率在一定程度上可以减少分组冲突发生的可能性,降低分组冲突引起的错误δCOL。然而,降低传输功率会降低通信范围和减少接收方与发射机的通信距离。 C-V2X使用QPSK、16-QAM调制方式和Turbo码编码方案传输传输块,而合适的调制和编码方案(Modulation and Coding Scheme,MCS)对于车对车或者车对多点通信系统至关重要,调制和编码方案能够确保整个通信系统具有最佳的系统容量和较高的鲁棒性[12]。因此,MCS的频谱效率(SE)计算如下: (25) 式中,S为数据包的大小;R为数据包的发送方式;N为接收端用户数量;BW为分配带宽。为了使通信系统具有较高的传输鲁棒性,MCS需要较低的频谱效率。不同编码方案、同一编码方案使用不同的编码速率所带来的频谱效率是不同的,C-V2X使用不同的调制方式,就会存在不同C-V2X系统容量和鲁棒性方面的差异。 蜂窝网络的信道传播模型具有多样性,而对C-V2X信道传播模型的研究还处于探索阶段。文献[6]指出传播效应引起的错误δPRO和分组冲突引起的错误δCOL与信号的传播信道类型高度相关,信号经过不同传播模型,对应不同路径损失,其δPRO,δCOL表现出差异。为了验证分析模型,本文只考虑以下大范围传播信道模型,考虑路径损失叠加、阴影和多径效应对信号衰减的影响。 2.4.1 two-ray信道模型 在真实场景,车辆Vt和Vr在移动过程中,会存在2条信号传播路径,一条是车辆间的直接传播路径,另一条是路面反射路径。因此考虑two-ray干扰模型是很有必要的,其路径损失PL计算过程如下: (26) (27) 式中,HTx,HRx分别为车辆Vt和Vr的天线高度;d为车辆Vt和Vr之间的距离;dc为车辆Vt和Vr之间交叉距离,计算如下: (28) 2.4.2 WINNERII信道模型 使用WINNERII信道模型可以进行通信系统在链路水平和系统层面的仿真,WINNERII信道模型包含14种信号传播场景,例如室内办公厅、城市微小区和室内外等。不同场景的延迟是不一致的。本文考虑车辆在城市和郊区2种运动场景。城市场景分析使用WINNERII B1信道模型,郊区场景使用WINNERII D1信道模型。WINNERII B1信道模型的路径损失计算如下: PL=22.7lg(dt,r)+20lg(fc),dt,r (29) PL=40lg(dt,r)+7.56-17.3lg(dt,r)×(HTx-Eh)- 17.3lg(HRx-Eh)-2.7lg(fc),dt,r≥dBP, (30) 式中,dt,r为车辆Vt和Vr之间的距离;fc=5.9 GHz;HTx,HRx分别代表车辆Vt和车辆Vr的天线高度;Eh为环境高度;dBP为breakpoint距离,其计算过程如下: (31) 式中,c=3×108m/s WINNERII D1信道模型的路径损失计算如下: PL=21.5lg(dt,r)+20lg(fc),dt,r (32) PL=40lg(dt,r)+10.5-18.5lg(HTx)-18.5lg(HRx)+ 1.5lg(fc),dt,r≥dBP。 (33) 2.4.3 3GPP信道模型 在3GPP R15版本标准中提出新的信道模型,将路径损耗划分为视距(LOS)和非视距(NLOS)2种情况,根据其建议,仿真时采用LOS场景下的路径损耗计算公式: (34) 在路径损失的具体计算过程中,还需要考虑阴影的值,在LOS情况下,同样服从对数正态分布,标准差为3 dB。NLOS情况下,阴影同样服从对数正态分布,此时的标准差为4 dB。本文是在LOS情况下分析模型性能,故采用标准差为3 dB的设置。 本文使用Matlab2019a搭建实验分析模型,将仿真结果与文献[15]中通过仿真器模拟得到的结果进行比较,先验证分析模型的准确性和可靠性。车辆以λ=10 Hz传输数据分组,传输功率分别为Pt=20 dBm,Pt=23 dBm,使用QPSKr=0.5,QPSKr=0.7,16-QAMr=0.5和16-QAM more[15]四种信号调制与编码方案。表1总结了验证所考虑的主要参数,这些参数的设置遵循3GPP C-V2X模式4评估指南[16-17]。 表1 仿真参数设置 本文采用分组传输率PDR和平均绝对离(偏)差(Mean Absolute Deviation,MAD)2组参数量化评估模型性能。由式(1)可知,PDR表示一定通信范围内接收节点无差错成功正确接收的数据分组可能性。而MAD用来比较分析模型仿真结果和仿真器模拟结果之间的平均绝对误差,使得二者之间的差异可视化。PDR和MAD的计算过程伪代码见算法1。 根据算法1可以计算出不同传输功率、不同MCS、不同信道模型下不同传输距离的PDR和MAD。从上述对不同传输参数对通信性能可能引起的错误进行的分析可以发现,不同的传输参数可能共同导致错误的发生,为了简化问题,本文采用组合交叉分析的方式,在同一维度下,分析在相同传输功率、相同MCS等仿真参数下的不同信道模型的PDR分析结果。 图2分析了不同信道模型下,仿真参数设置为Pt=20 dBm,λ=10 Hz,β=0.1,每子帧信道数为2时的不同编码和调制方案时PDR(虚线)分析结果,与仿真器模拟的PDR(实线)结果之间的差异。仿真结果表明,在发射功率、传输速率和车辆密度等仿真参数相同时,不同信道模型在同一MCS与同一MCS在不同信道模型下的PDR的结果与仿真器模拟的PDR结果存在差异,这种差异主要是由路径损耗PL带来的。从图2中可以看出,信道传播模型和MCS对信号的广播性能影响较大,PDR随着传播距离的增加而减少。WINNERII B1信道模型在MCS为16-QAM more,QPSKr=0.5和QPSKr=0.7的PDR分析结果更为匹配仿真器模拟的PDR结果,这一定程度佐证了分析的准确性和可靠性。而3GPP信道的PDR随着传播距离的增加而减少的趋势较其他3种信道模型而言更为缓慢,WINNERII D1信道的PDR随着传播距离的增加而减少的趋势较其他3种信道模型而言更为明显。 在不同信道模型下,仿真参数设置为Pt=23 dBm,λ=10 Hz,β=0.1,每子帧信道数=2时,不同调制和编码方案PDR(虚线)分析结果与仿真器模拟的PDR(实线)结果之间的差异如图3所示。从图3(a)中可以看出,在MCS为16-QAMr=0.5时,不同信道模型的PDR结果与仿真器模拟的PDR结果之间存在很大的差异,随着传播距离的增加,各信道模型的PDR减少趋势更为明显,与仿真器模拟值之间的差值变大,这样的减少水平会损害系统的稳定性和可扩展性。WINNERII B1信道模型在MCS为QPSKr=0.7的PDR分析结果更为匹配仿真器模拟的PDR结果。 由图2和图3可以看出,不同传输功率下,模型的PDR是不同的,Pt=23 dBm的PDR随着传播距离的增加而下降,明显弱于Pt=20 dBm。一定程度上,WINNERII B1信道模型的PDR比其他3种信道模型更为匹配仿真器模拟的PDR结果,误差也最小。在Pt=23 dBm和Pt=20 dBm,MCS为QPSKr=0.7时,WINNERII B1信道模型的PDR更为匹配仿真器模拟的PDR结果。 (a) Pt=23 dBm,16-QAM r=0.5 表2~表5分析了模型的准确性。这些表格使用MAD度量了不同信道模型在不同传输功率和不同MCS下的PDR和4种不同传输错误。从表中的数据可以看出,与通过模拟获得的预测数据相比,对于同一传输功率和同一MCS,不同传输功率和同一MCS,WINNERII B1信道模型的分析数据误差低于其他3种信道模型,在许多情况下,误差大于1%,而two-ray信道模型表现最差。在Pt=20 dBm,MCS为QPSKr=0.5时,WINNERII B1信道模型的分析数据与通过仿真获得数据之间的差距最小,更为贴近仿真数据。半双工传输引起的错误δHD所占的比例最小,且跟传输功率无关。传播效应引起的错误δPRO所占比例较大,不同信道模型在同一传输功率和同一MCS、不同传输功率和不同MCS下的δPRO平均相差不到0.05%。组冲突引起的错误δCOL占比最大,由于C-V2X模式4采用基于感知的半静态调度协议,可以认为基于感知的半静态调度协议存在明显的资源碰撞。 表2 PDR和4种不同类型错误的MAD(Pt=20 dBm,Pt=23 dBm,QPSK r=0.7) 表3 PDR和4种不同类型错误的MAD(Pt=20 dBm,Pt=23 dBm,QPSK r=0.5) 表4 PDR和4种不同类型错误的MAD(Pt=20 dBm,Pt=23 dBm,16-QAM r=0.5) 表5 PDR和4种不同类型错误的MAD(Pt=20 dBm,Pt=23 dBm,16-QAM more) 本文提出了多信道模型下C-V2X模式4的通信性能分析模型。对不同传输功率、不同信道模型和不同调制和编码方案等传输参数结合传输过程中可能存在的4种错误进行建模分析。将分析模型获得的结果与通过仿真器模拟获得的结果进行比较。分析结果表明,分析模型能够较为准确地模拟出C-V2X模式4的通信性能。信号在WINNERII B1信道模型不同实验参数设置下分析得到的结果都更接近仿真模拟结果,验证了分析模型的准确性和可靠性。结果还表明,基于感知的半静态调度协议存在明显的分组冲突,如果车辆需要频繁地重新选择资源,或者没有充分利用保留的资源,这必然导致通信资源的损失,需要更为完善的资源分配方案,来提高C-V2X模式4的通信性能。
2.2 传输功率
2.3 调制和编码方案
2.4 信道模型

3 模型验证

3.1 性能评估标准
3.2 分析验证


4 结束语
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18北京航空航天大学学报(2021年7期)2021-08-13火控雷达技术(2021年2期)2021-07-21小学生学习指导(低年级)(2019年3期)2019-04-22雷达与对抗(2018年3期)2018-10-12小学生学习指导(低年级)(2018年9期)2018-09-26北京航空航天大学学报(2017年3期)2017-11-23小学生导刊(低年级)(2017年1期)2017-06-12北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27燕山大学学报(2015年4期)2015-12-25