
步履式全地形六足机器人
2022-01-23 08:45马春燕窦银科王煜尘
液压与气动 2022年1期
杨 政, 马春燕, 窦银科, 王煜尘
(太原理工大学 电气与动力工程学院, 山西 太原 030024)
引言
中国的极地科学考察事业距今已30多年,极地科学考察的环境十分恶劣,为了避免污染,对科研人员的要求苛刻,一些非常规极端环境还无科学考察的足迹,因此进行极地无人科考有很大的发展空间。目前极地科考用机器人只有传统的履带式或轮式结构,步履式和六足仿生结构的机器人在极地科考的应用十分罕见[1]。
近年来,轮足式机器人已成为国内外研究热点。美国Boston Dynamics公司首款轮腿式机器人“Handle”,在结构上采用仿人形设计,以车轮代替足端,具有快速移动的能力,同时,能够实现原地快速旋转与爬坡功能[2];瑞士苏黎世联邦理工大学机器人实验室在2018年研制出名为“ANYmal”的四足轮腿式机器人,该轮式四足机器人在地面和倾斜地形上行走时,表现出高鲁棒性和动态稳定性,甚至被推倒后,仍可爬起来继续移动[3]; 日本东京工业大学SHIGEO等研制的Roller-Walker轮足混合式机器人,该机器人足端有一个转换机构,当出现崎岖地形时,采用足式运动,当地面平滑时,该机构使其转换成轮式运动[4]。国内轮足式机器人起步较晚,但发展速度很快。清华大学在早期设计了含有8个车轮的轮腿式移动机器人,均匀分布在车身两侧,在进行越障或腿式模式运动时,2个车轮竖直排列,当作机器人的腿部。北京理工大学启动“北理哪吒”项目,创新性提出了电动并联式轮足机器人总体思路,将4个并联六自由度运动平台倒置,并在每个平台下端安装车轮组件,形成可实现轮式、足式和轮足复合式运动的电动并联式轮足机器人—北理哪吒(BIT-NAZA)[5]。
但是上述机器人存在不足之处:轮式机械行驶结构主要缺点是附着力小,通过性能较差;履带式行驶系统的结构复杂,质量大,而且没有像轮胎那样的缓冲作用,易使零部件磨损,所以其机动性差,行驶速度较低,且易损坏路面;四轮腿结构的机器人的足式运动速度慢,运动效率低且易侧翻[6]。
提出了一种步履式全地形六足机器人,将履带式与六足仿生结构相结合,克服传统履带式行驶结构不能在复杂地形工作的缺点,利用独立多自由度转向液压支腿进行自由角度调整,补偿地形凸凹高度差;同时采用导电滑环和挂胶履带设计,机器人360°无死角转动,可有效解决一般轮式或履带式机器人在极地极恶劣自然环境下难以正常行进、非常规环境无法进行科考等等一系列问题。其优越的越野能力可以使其搭载不同的设备,完成各种不同任务类型的科考工作[7]。
步履式全地形六足机器人主体由中心腹部和六足组成,如图1所示。其中六足呈中心对称,均采用两轴承座固定在中心腹部上, 结构稳定、刚性好,并且用舵机驱动整足转动[8],表1所示为步履式全地形六足机器人运动性能参数。

图1 步履式全地形六足机器人

表1 运动性能参数
1 系统整体方案
1.1 腹部结构
1) 结构概述
中心腹部结构如图2所示,腹部是由1块2 mm的玻纤下中心板、1块2 mm的碳纤上中心板和6块2 mm 的碳纤侧板组成的扁平六棱柱,迎风面积小,整体结构轻且承载力大。

图2 中心腹部结构
根据空气阻力公式:
(1)
式中,C—— 空气阻力系数,与物体的迎风面积、物体光滑程度以及物体的形状有关
ρ—— 空气密度,正常的干燥空气可取1.293 g/L
S—— 物体迎风面积
v—— 物体与空气的相对运动速度
在设计机器人的腹部时,为减少迎风面积,可以在遭遇风暴的情况下减小受到的阻力,以保证机器人的稳定性[9]。
中心腹部内部结构如图3所示,置有控制中心,包括主控板、舵机驱动板、直流减速电机驱动板和6个转向舵机[10]。

图3 中心腹部内部结构
2) 主控板
主控板是整个六足机器人的控制核心,负责人机交互以及协调机器人整体运动。选用意法半导体集团生产的STM32F407ZGT6单片机,拥有高达(192+4) kB的SRAM,16 MB内存空间,主频为168 MHz,在浮点运算和数据处理当中有及其突出的优势,非常适用于所设计的六足机器人[11]。
3) 舵机驱动板和直流减速电机驱动板
舵机驱动板和直流减速电机驱动板均采用Altera公司生产的低功耗的复杂可编程逻辑器件EPM1270 T144I5芯片。将舵机控制程序写入舵机驱动板内,控制6个转向舵机,负责六足的水平转动。通过实验测试,每足回转范围可达60°。将电机控制程序写入直流减速电机驱动板内,控制直流减速电机,负责6个履带小车精确爬行。
4) 舵机
采用DS3120MG型单轴数字舵机,体积小、扭力大(具有20 kg扭力)、质量轻、散热性能好,同时舵机内部自带控制电路和比例电位器。舵机控制流程如图4所示,控制脉冲输入舵机的控制电路中,可控制舵机转动,同时将比例电位器内信息通过比例电压返回控制电路中,实时监控舵机的旋转角度[12]。因此,舵机更加适合在六足机器人上使用。

图4 舵机控制流程
1.2 足部结构
足部结构如图5所示,六足均由机械臂(大臂和小臂)和履带小车构成,万向节连接小臂和履带小车。机械臂有4个自由度: 水平回转、大臂上下摆动、小臂上下摆动以及小车自由回转。每足采用两轴承座固定在腹部,结构紧凑、回转灵敏、装配维护方便。

图5 足部结构
1) 机械臂结构
机械臂采用铝合金制成,大臂长为35 cm,小臂长为30 cm,大小臂之间转动角度达15°。大臂上下摆动和小臂上下摆动均采用L1101010101型电动推杆驱动,输入电压为12 V,推力可达到60 N,体积小、精度高,使用DS3120MG舵机直接驱动。同时,大臂和小臂均采用镂空设计,重量轻,同时减少迎风面积,减小所受阻力[13]。
2) 导电滑环
导电滑环如图6所示,小臂与履带小车采用万向节连接,可自由摆动,同时采用H083-0605TC型导电滑环设计,实现小车360°回转无死角。具有体积小、扭矩低、损耗小、电噪声低等优点,非常适用于六足机器人的设计[14]。
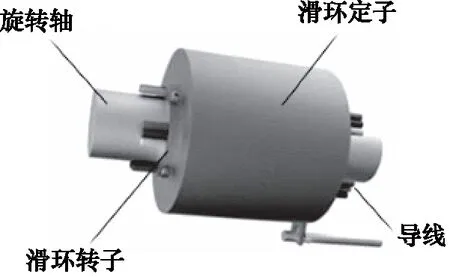
图6 导电滑环
导电滑环可以实现机器人小臂和履带小车信号及电流的传递,是一种可旋转的连接器。导电滑环主要分为定子和转子两部分,其中定子采用金属环,转子采用电刷丝,定子和转子分别连接输入输出导线。导电滑环工作时,转子随着设备转动,定子始终不动,转子可以实现任意角度的旋转。通过定子中环片的滑动与转子中电刷丝的接触摩擦传递信号,这种方式的优点是在保持传输信号的同时不发生绕线事故。
传统机器人运动关节通常采用舵机控制,改进后采用舵机和导电滑环结合的驱动方式。一是可以利用导电滑环获取关节的偏移量,机械臂下部的全向关节因崎岖的地形移动时,导电滑环会产生一个角度偏移的返回值,用以调整修正关节角度,防止因为通过崎岖地面造成的履带方向偏转,比传统的舵机更能适应凹凸不平的地形;二是导电滑环可以实现任意角度自由转动,带动万向关节360°无死角转动[15]。
3) 履带小车
为了应对不同复杂崎岖的地形,机器人的履带采用挂胶履带,可以方便更换橡胶模块以应对不同的工作环境。履带替换有以下几种:
(1) 常规行进履带如图7所示,用于通常情况下的机器人行进,其厚度、宽度均与履带基体本身相同,花纹深度与数量始终,适用平整路面上;

图7 常规行进履带
(2) 松软易陷地面行进履带如图8所示, 用于在地质松软车体容易陷入的地面行进,其长度大大增加,可以减小车体对于地面的压强,防止陷入和帮助快速通过;

图8 松软易陷地面行进履带模块
(3) 崎岖路面行进履带如图9所示,用于岩架,沟壑地区的行进,采用三棱柱形金属履带模块,相比于橡胶模块大大加强对于岩石的固定强度防止其在翻越岩体、沟壑时滑落;

图9 崎岖路面行进履带
(4) 防滑行进履带如图10所示,用于冰面等较为光滑的地面行进,其突出的大量锯齿使车体摩擦力大大增加,减少车体的打滑并帮助快速通过[12]。

图10 防滑行进履带
为了延长履带板的使用寿命,经过多种材料的测试,最终在履带板中加入橡胶衬套。首先,橡胶衬套的弹性变形能力较强,履带小车运动时噪声小,减振效果强;其次,橡胶衬套中的橡胶形状可灵活改变,可自由选择各个方向的刚度;同时,橡胶衬套结构简单,可添加在金属材质的履带板上,并且可轻易承受各个方向的载荷。在设计橡胶衬套时,应采用圆柱体形状,根据受力测试分析,一般橡胶衬套容易在与履带板帖接部分以及折叠弯曲部分产生损坏,所以在其端部设计为圆角可以更好的提高其使用寿命[16]。
2 六足机器人动力设计
步履式全地形六足机器人采用改进的步履式动力设计。六足分散在不同区域,相对传统运动方式更有利于寻找到较大的支撑面积以及最合适的支撑位置,进而更有利于穿过崎岖复杂路面;其次,步履式系统在路况较为崎岖以及松软地面上可以做到主动减振,这也是传统运动方式难以解决的问题。根据测试数据表明,在崎岖不平的坚硬地面上行驶的平均速度为:履带式工程车辆为8~16 km/h ,轮式车辆为5~8 km/h,而足式动物的奔跑速度最高可达56 km/h;在有25.4 cm(1 in)深软土的地面上履带式车辆所需要的推进功率7.46 kW/t,轮式车辆所需要的推进功率为11.3 kW/t,而足式行走车辆只需要5.22 kW/t。因此可知步行式运动方式较传统的运动方式速度更快,同时更加节省能量[17]。
但是步履式结构采用轮式与步行机构结合,轮式结构存在较为明显的缺陷,在冰面、瓷砖等光滑地面上摩擦较小,非常容易打滑,造成不必要的损失。履带式结构弥补了轮式结构这一缺陷,其牵引性能和通过性能更加出色,并且履带板上都有履齿,可深入质地松软的地面中,相对而言适用于更多的复杂地形[18]。所以将步履式中的轮式机构改进为履带式,采用步履式行走机构与履带式机构的结合来解决这一问题。与传统履带式机器人只能在相当平坦的地面上才能工作相比,更换履带式结构的步履式机器人可以自由地根据不同需求调整其足部关节,实现在野外崎岖的倾斜路面上正常行走。这样可以博取众长,既有履带式的大承载力,也有步履式优越的越野性能。在较为平整的地面行进可以采用履带式前进模式,在复杂的山地可以采用步履式的前进模式[19]。
3 六足机器人工作流程
步履式全地形六足机器人工作流程如下,如图11所示。

图11 六足机器人工作流程
(1) 开机,系统自检各线路是否正常连接,检查与控制器是否握手成功;
(2) 监测车体周围环境状况,如监测到有风暴,则转换为避险模式,降低车体高度,躲避险情;
(3) 确认无风暴后,转换为行进模式,各履带转向同一角度,车体前进;
(4) 监测履带转向装置处导电滑环是否有返回值,如有说明因地形原因导致履带偏移或滑动,则按返回值计算偏移角度并修正;
(5) 监测车体行进途中是否遇到障碍,例如沟渠、裂隙、碎石等,如监测到有障碍,则转换为避障模式,抬升车体高度,并转换为步行行进状态,越过障碍;
(6) 不断重复以上监测流程,始终保持机器人正常运行,直到按计划完成任务。
4 实验结果与分析
机器人测试实验如表2所示,针对不同地形,对步履式全地形六足机器人进行了速度测试、负重测试、灵活度测试以及抗干扰能力测试。

表2 机器人测试实验
当实验环境处于常规平坦路面时,机器人行进采用正常模式,机械臂上下部推杆收缩,车体升至最高,同时更换常规行进履带。对于直线下行进速度的测试,无负载状态下行进速度为0.7 m/s,接近正常人的步行速度,在施加最大负载下机器人速度略有减慢;对于灵活度的测试,进行90°转向时仅需3 s,在实验过程中遇到障碍物或者突发情况时可做到灵活转向;对于直线行驶时抗干扰能力的测试,由于采用导电滑环的设计,可实时矫正履带小车偏移角度,因此即使施加外力,机器人的行进方向也不会出现明显偏差。
当实验环境处于松软易陷路面和光滑路面时,机器人更换相匹配的履带替换模块,其行进速度、灵活度以及抗干扰能力相对常规平坦路面略有变化,但是依旧保持良好的性能。
当实验环境处于崎岖路面时,机器人行进采用越障模式,机械臂上部推杆推出,下部推杆收缩,同时更换崎岖路面行进履带。在前方有障碍物时,机器人前肢抬起,前进越过障碍后放下,依次使中肢,后肢越过障碍,从而完成越障操作;遇到沟壑时,先将中肢后移,使重心位于后方,前进让前肢到达沟壑另一端,再让中肢前移,使重心位于前方,再前进越过沟壑。通过实验数据显示,在该模式下行进速度为0.3 m/s,相对于其他路面速度有所降低,且行进途中略有颠簸,但并未使负载物掉落,其转向时的灵活度以及抗干扰能力变化不大。
当进行强风测试时,为提高机器人的稳定性,采用避险模式,机械臂上部推杆收缩,下部推杆推出,此时六足张开以降低车体重心。通过实验数据显示,其行进速度略有降低,在转向时较为缓慢,但是由于六足仿生结构以及导电滑环的设计,其抗干扰能力依旧有良好的表现。
通过在不同地形下对步履式全地形六足机器人进行性能测试,可以得知采用履带式与六足仿生结构相结合,并引入挂胶履带,在大部分复杂地形中可正常行进以及带负载工作,同时可保证其较高的灵活度以及抗干扰能力。
5 结论
设计了一个步履式全地形六足机器人,有多种模式可供选择。在避障模式下,可通过六足上下和前后移动越过裂隙及石块等障碍物;在自我保护的模式下,可通过降低车体高度来减小受风面积,提高机器人的稳定性,等周围环境恢复正常再继续保持运动。与传统的机器人相比,模式更为多样,遇到各种复杂地形和多种突发情况可转换成对应的运动模式针对性地前进。通过实验表明,机器人实现了在不同的地形环境下,采用不同的工作模式,可以安全、稳定、灵活的运行,具有一定的实用价值。主要创新点如下:
(1) 采用导电滑环的设计,防止因为通过崎岖地面造成的履带方向偏转以及履带小车不能自由转动的问题,实现机器人360°无死角转动,适应各种复杂的地形;
(2) 采用挂胶履带的设计,更换不同种类的履带模块以应对履带的损伤与不同的地形;
(3) 采用改进的步履式动力设计,通过调整大小臂的电动推杆可以实现机器人的角度调整,补偿地形凸凹高度差,进而能够在倾斜地形正常行驶。
猜你喜欢
廉政瞭望·下半月(2022年4期)2022-05-12
商品与质量(2021年43期)2022-01-18
疯狂英语·新读写(2021年8期)2021-11-05
金桥(2021年1期)2021-05-21
兵器装备工程学报(2021年3期)2021-04-09
北京航空航天大学学报(2020年10期)2020-11-14
创新作文(1-2年级)(2017年11期)2018-04-17
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
坦克装甲车辆(2000年6期)2000-06-13
