基于融合算法的电动汽车AEB控制策略
2022-01-22 09:16:30辛佳庚杨复钰张宝迪
北京交通大学学报 2021年6期
辛佳庚,杨复钰,张宝迪,张 欣
(北京交通大学 机械与电子控制工程学院,北京 100044)
自动紧急制动AEB是避免或者缓解碰撞的一种主动安全技术,是先进驾驶辅助系统(Advanced Driving Assistance System,ADAS)中的一种功能[1-2].研究表明,安装了AEB系统的车辆追尾事故总体减少了38%[3].AEB控制策略研究一直是AEB系统研究的热点,由于电动汽车的驱动、制动部分与传统内燃机车有较大差别,研究电动汽车的AEB系统具有重要的价值.
目前,国内外学者多针对AEB控制策略中的安全距离算法和碰撞时间算法TTC进行研究.文献[4]采用安全距离算法实现汽车纵向主动避撞.文献[5]采用预警安全距离和制动安全距离算法进行安全性评价分析.文献[6-10]从驾驶员主观感受、反应状态等角度出发,围绕驾驶员反应时间、期望距离等问题对安全距离算法进行了改进,改进算法得到了较好的效果.文献[11]针对传统的碰撞时间算法不适用于相对车速接近零等特殊工况,提出了一种考虑本车和最危险目标的相对加速度的改进TTC算法.文献[12]采用车间时距值的方法来弥补传统TTC算法的不足.文献[13-15]在使用TTC倒数算法的基础上通过仿真及驾驶数据分析,在制动稳定性或驾驶员制动行为等方面进行了针对TTC算法的改进,取得了一定的效果.综上,安全距离算法中由于不涉及时间概念,在驾驶员的体验上不及TTC算法,故对驾驶员的研究较多;而TTC算法中不涉及距离概念,在安全性上不及安全距离算法,所以在安全性上研究较多.目前针对AEB控制策略研究中,同时考虑安全距离算法和碰撞时间算法的研究不多,缺少综合考虑复杂工况下同时提升安全性和舒适性的AEB控制策略研究.
针对目前控制策略研究的不足以及电动汽车AEB系统的功能需求,本文作者设计了基于融合算法的AEB控制策略,针对行车过程中道路附着系数变化进行算法优化以此来适应差异化路面,综合利用安全距离算法和TTC算法保证安全距离的同时提升乘车舒适性,用以支持下一步更准确地进行智能AEB系统控制、优化自动预警和自动制动方案提供基础.
1 AEB控制策略研究
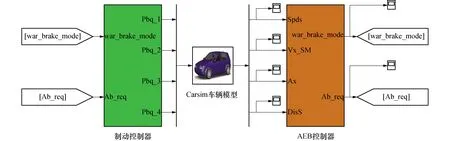
AEB系统的感知模块主要通过自身传感器和视频雷达等感知传感器来获取自车与周边的环境信息.控制模块主要是对前方的碰撞做出预测,并提前给出预警制动的指令.执行模块主要包含自动预警过程及自动制动过程中的执行器,主要用于制动过程中自动调节电机扭矩以及制动压力.基于融合算法的AEB控制策略应用于如图1所示的系统架构.
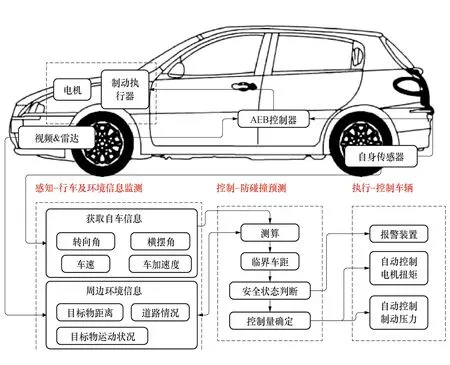
图1 电动汽车AEB系统总体设计架构图
AEB系统需要对碰撞的危险程度有一个评判的方法,即如何通过综合考虑自车性能和自车的运动状态,并结合前方运动目标的状态来判断危险的程度.车辆AEB系统判断出危险后进行碰撞预警和紧急制动,以避免碰撞或者最大程度上减少碰撞速度.系统判断危险时不仅与自车相关,还与前方目标的运动状态相关,因此需要严谨的安全距离算法或碰撞时间算法来预估未来两车的相对运动状态,同时需要配合算法的相应策略来提前发出预警和制动指令提升主动安全性.
1.1 安全距离算法
基于融合算法的AEB控制策略应用场景在制动过程前后两车对应位置关系如图2所示,制动过程中假设在同一车道上有同向行驶的A车(速度为vA)和搭载AEB系统的B车(速度为vB),并在采用紧急制动时不考虑转向等其他避让方式.
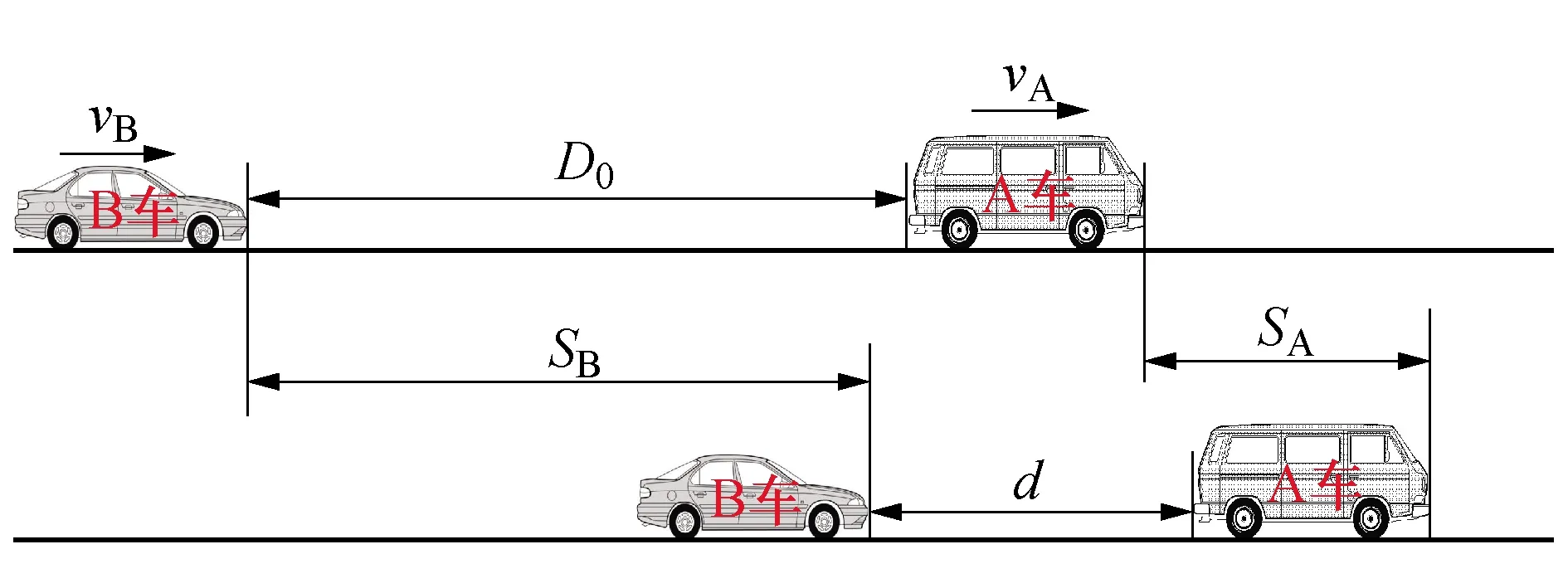
图2 制动过程前后两车对应位置关系
由图2可知,最小安全距离D0为
D0=SB+d-SA
(1)
式中:SB为在制动过程中B车的行驶距离;SA为制动过程中A车的行驶距离;d为设定的整个制动过程中两车间的最小相对距离.
为了保证d恒定不变,需要计算SB与SA来求出D0.计算出的最小安全距离D0在多数工况下能保证行驶安全,但由于驾驶员熟练度及反应时间等情况影响并不能保证绝对安全.为了提高安全性,保证B车驾驶员有充足的反应时间,将第一次预警时两车相对距离称为目标锁定距离D1, 第二次预警时的两车相对距离称为危险临界车距D2,在安全距离算法之中,若采用两次预警模式,两次预警时长通常是一样的[16].将每次预警的时长用t0表示,第一次预警在最小安全距离的基础上增加2t0的时间保证B车驾驶员有充足的反应时间.预警制动模式如图3所示.
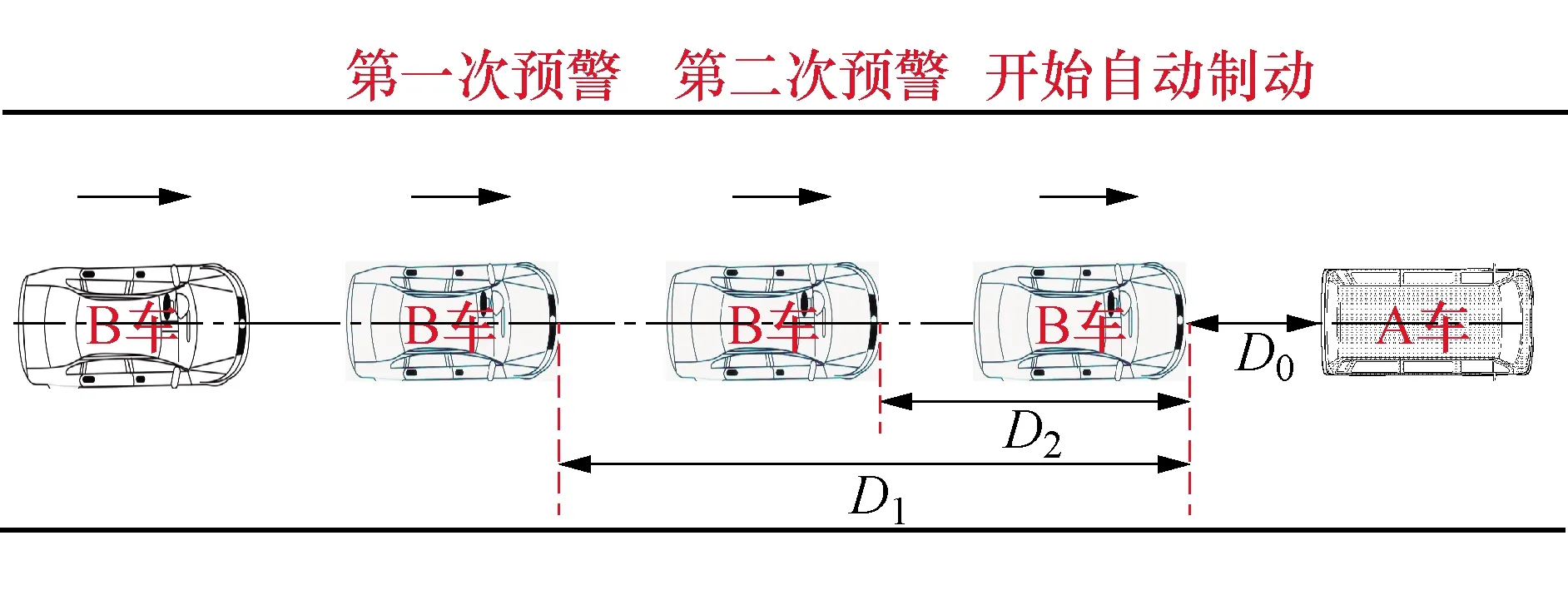
图3 预警制动模式示意图
1.2 优化的安全距离算法
在安全距离算法中路面附着系数通常被设为常量,算法只能在某种特定路面获得较好的制动和预警效果,无法实现对不同路面条件的自适应[17].所以在路面附着系数较低的路面下,安全距离算法并不能满足复杂工况的要求.因此,有必要将路面附着系数作为重点研究方向,着重分析路面附着系数低时出现制动效果降低等问题.路面附着系数的影响因素主要为:轮胎因素、路面因素及行驶车速.路面附着系数μ与B车最大制动减速度aBmax满足关系式为
aBmax≤μg
(2)
式中:g为重力加速度.
分析可知,最大的制动减速度与路面附着系数相关,且不会超过μg.在雪地和冰面等附着系数比较低的路面下行驶车的制动减速度可能会发生变化,此时后车以前车制动减速度带来的速度变化作为系统输入信息,很可能会导致实际制动减速度达不到目标减速度与前车相撞,所以在路面附着系数较小时应提前制动来避免相撞.在安全距离算法计算时代入关系式
(3)

将式(3)代入表1中的安全距离算法距离阈值公式中可以实现不同路面附着系数下的避撞,在附着系数低的工况下提前制动,可有效避免因制动力不足导致两车相撞.
1.3 碰撞时间算法
碰撞时间算法通过时间维度为驾驶员警示危险[18].碰撞时间算法TTC是指从当前时刻开始,两车保持当前车速行驶直到发生碰撞所需的时间.当行驶在路上的A车静止或匀速行驶时,采用一阶TTC;当A车制动时,采用二阶TTC.
TTC的基本公式为
(4)
式中:x为前、后车实际距离;vr为前、后车相对速度;ar为前、后车相对加速度.
本文中的TTC为指标开发预警算法,其不考虑车辆加速度微分,且仅当B车车速大于A车车速时才进入TTC算法.为了避免碰撞,前后车应满足的关系式为
(5)
式中:aA为A车加速度;aB为B车加速度.
通过对汽车制动过程的特性分析,推导出安全距离算法和TTC算法针对不同典型工况下的距离阈值、制动阈值、预警距离阈值等公式,如表1和表2所示.
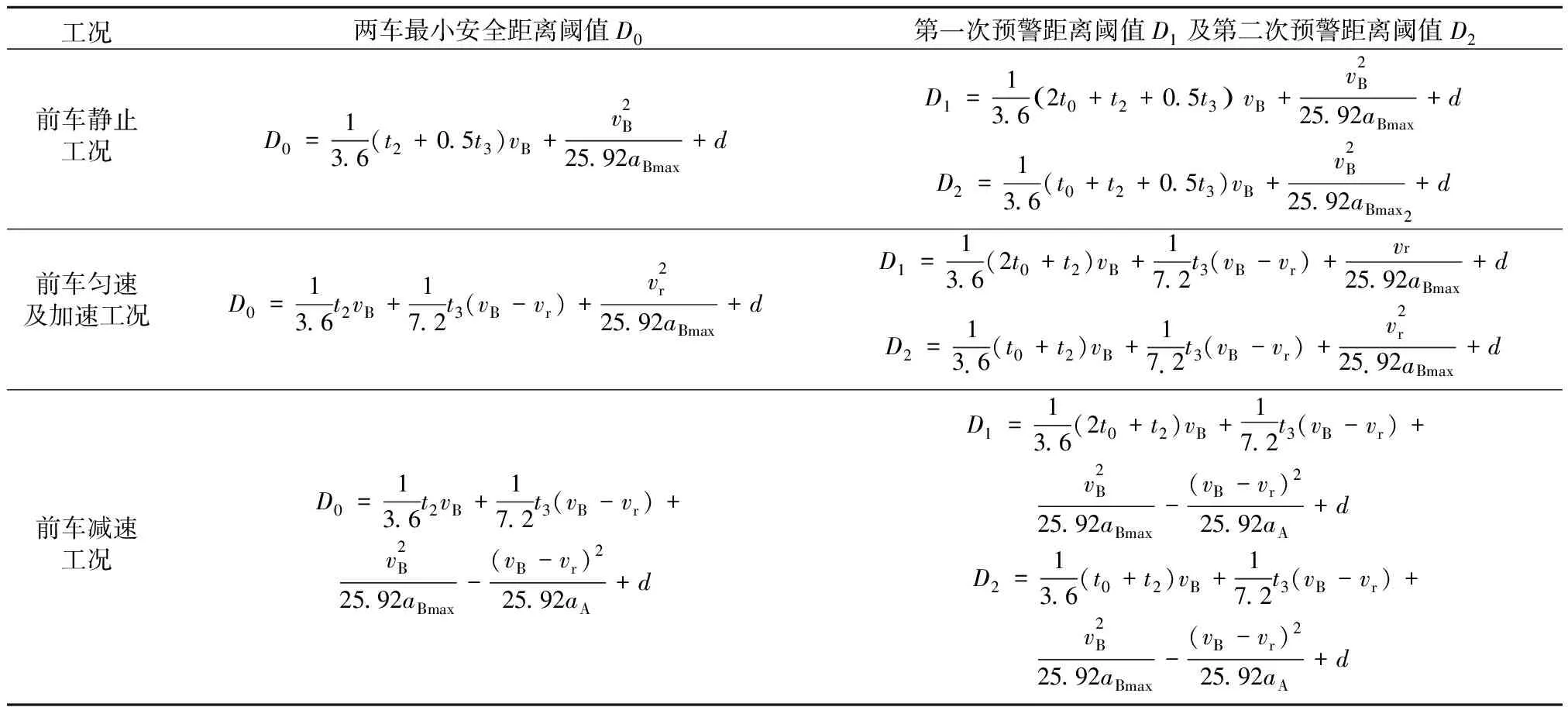
表1 安全距离算法不同工况下的阈值特征
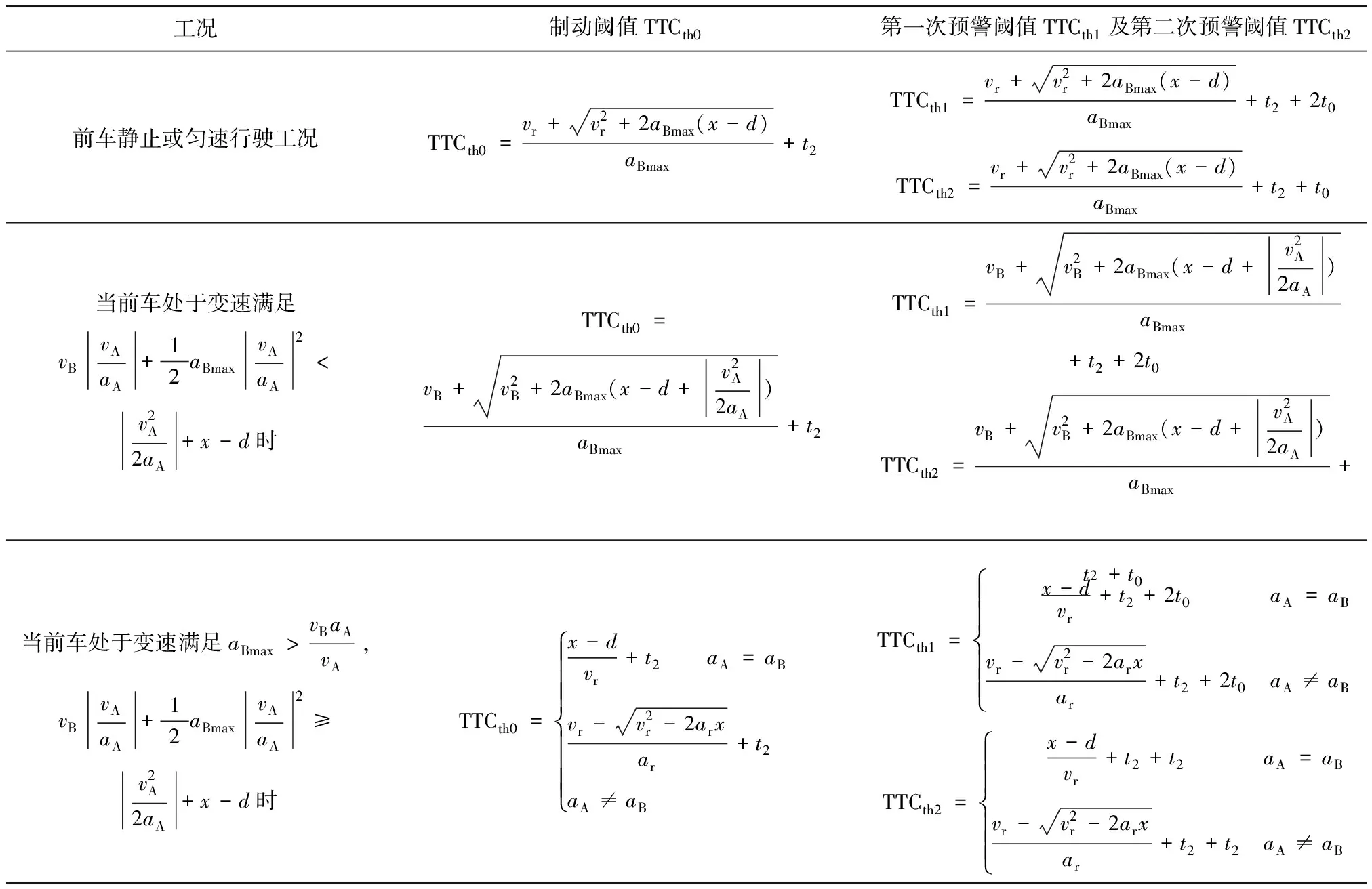
表2 TTC算法不同工况下的阈值特征
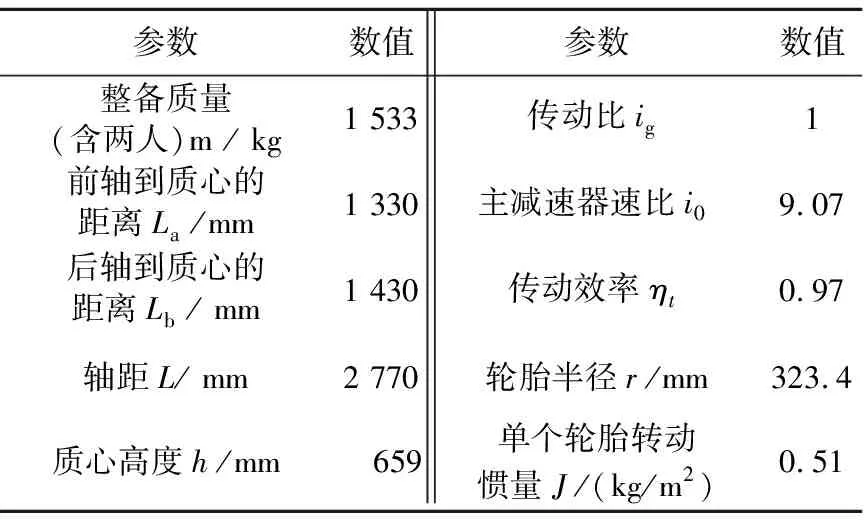
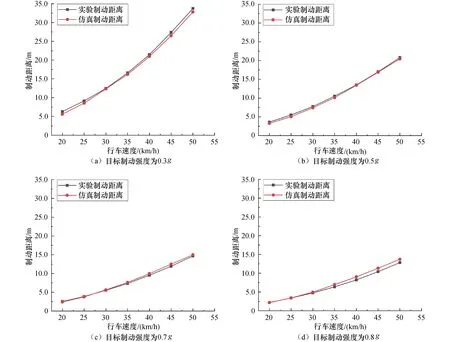
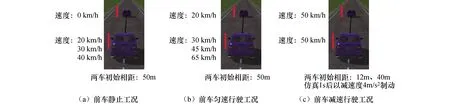
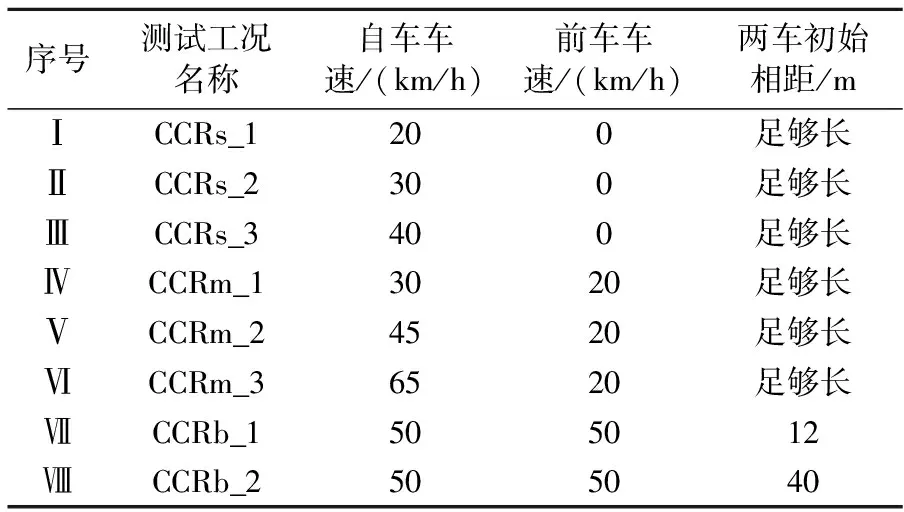
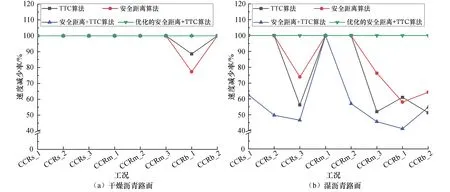
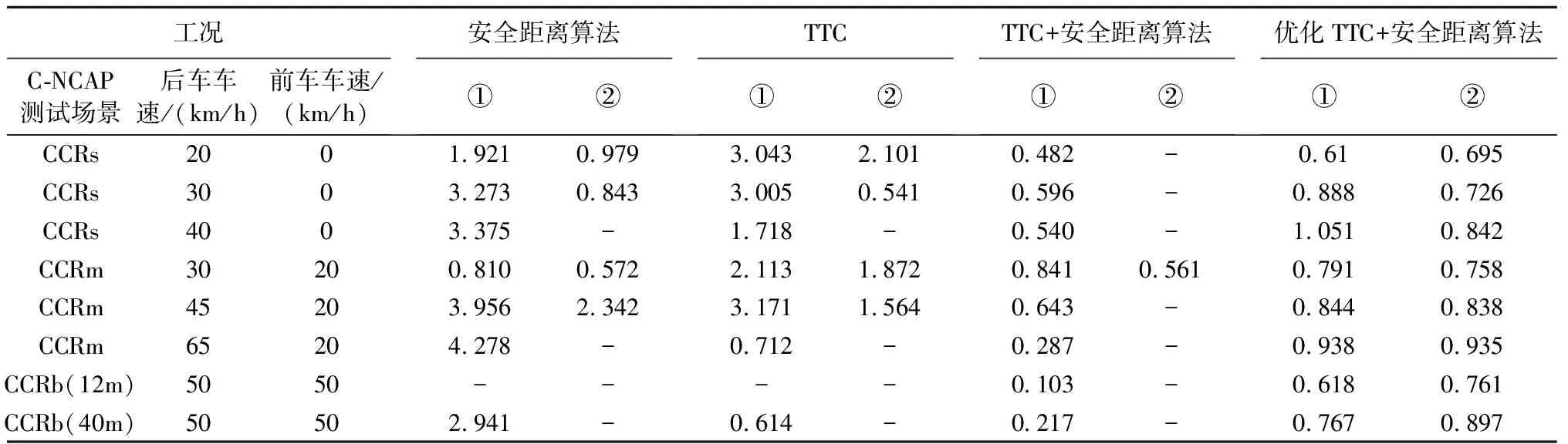
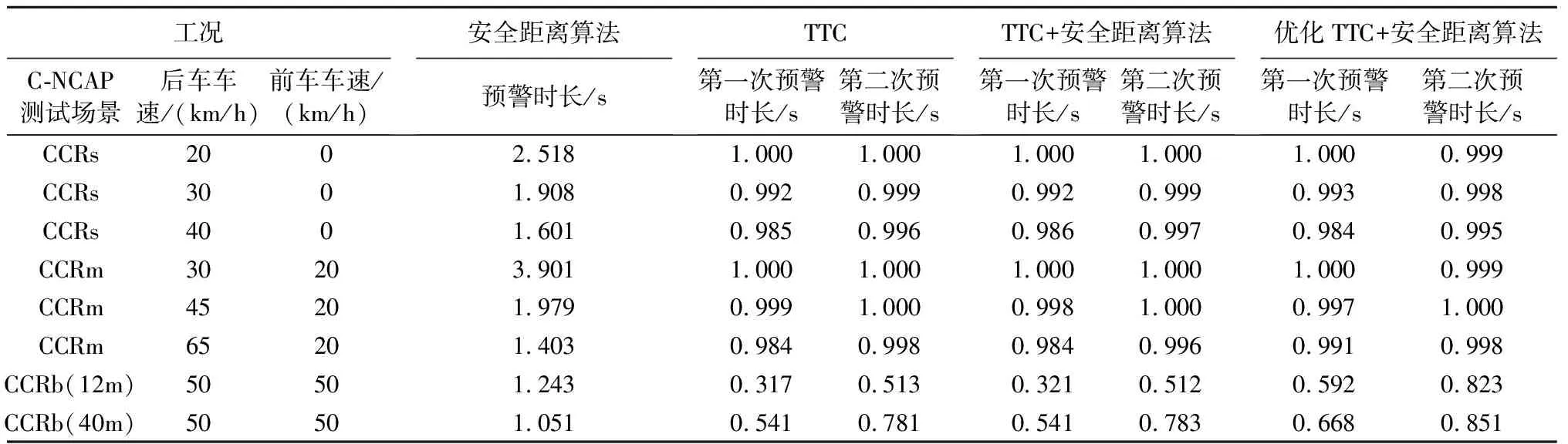
综上,通过将考虑路面附着系数的安全距离算法和碰撞时间算法进行融合并进行了优化,使车辆在包括低附着系数路面等复杂工况下既能停在与前方目标的安全距离范围内,又能对驾驶员进行预警.预警时段使用TTC算法,制动时段使用改进安全距离算法和TTC融合算法及策略如图4所示.在融合算法中,改进安全距离算法与TTC算法始终进行判断,当两车的相对距离D大于两车最小安全距离D0时,使用TTC算法来判断预警,并通过TTC的阈值来判断是正常行驶还是分级预警,TTC值较大时汽车正常行驶,若TTC≤TTCth1,则发出第一次预警的信号;TTC持续减小,若TTC≤TTCth2,则发出第二次预警信号;当D 图4 安全距离算法与TTC算法融合算法及策略 在CarSim中搭建AEB的仿真模型,包括整车模型、感知传感器模型以及道路模型,选择Simulink软件来编写算法和控制策略以及部分模型的搭建.研究对象的整车模型是针对项目样车参数在CarSim中搭建的,整车参数如表3所示,将整车参数输入到CarSim的整车模型中,主要包括整车质量、前后轴到质心的距离、轴距、质心高度及轮胎转动惯量等参数的设置,其中整车质量应随实际工况修改. 表3 仿真所使用整车参数 为判断系统仿真模型与实际系统作用的一致性,对仿真模型进行了验证,确保仿真中触发自动紧急制动时,制动时间和制动距离真实可靠.基于Simulink与CarSim联合仿真中紧急制动的效果验证方案: 1)使用搭建的Simulink-CarSim电动汽车仿真平台,CarSim中的整车仿真参数与实车参数一致,主要参数为整备质量、轮胎参数等.环境设定尽可能一致,如坡度等. 2)按照实车试验条件进行仿真,对仿真结果和试验结果的实车制动距离和制动时间进行对比分析. 试验方法为关闭能量回收,分别取50 km/h,45 km/h,…,20 km/h减速至0 km/h的车速段数据进行分析,目标制动强度分别为0.3g,0.5g,0.7g和0.8g,均为典型的紧急制动工况.制动距离是指给出刹车信号到车辆静止的过程中,车辆所行驶的距离;制动时间为给出刹车信号到车辆静止的过程中所经历的时间值.实车测试中使用上位机控制ESP发出制动扭矩来制动,经过标定后使实际制动强度在0.3g,0.5g,0.7g和0.8g记录制动距离和制动时间,测试条件为干燥沥青平直路面,整备质量1 403 kg+130 kg(两人).实车测试场景及工作台见图5. 图5 实车测试场景及工作台 实车与仿真的制动距离对比如图6所示.通过对数据点的分析可知,目标制动强度在0.5g、0.7g下实验条件下的制动距离与仿真条件下的制动距离相差较小,目标制动强度在0.3g条件下行驶速度较低时偏差较大,目标制动强度在0.8g条件下速度较高时偏差较大,仿真的制动距离通常大于实车的制动距离,其原因在于实际制动强度与目标制动强度存在偏差,且在制动强度较高时系统稳定性较差,很可能影响制动效果.仿真的制动距离与实车的制动距离总体偏差较小,误差的平均值为4.438%. 图6 实车试验与仿真制动距离对比 实车与仿真制动时间对比如图7所示.通过对数据点的分析可知,行车速度较小时,仿真制动时间比实车试验的制动时间要偏小;行车速度稍大时无明显规律,原因在于由于实际的路面附着系数较难测量,在仿真设置时会有一些误差.仿真的制动时间与实车的制动时间总体偏差不大,误差的平均值为3.889%. 图7 实车试验与仿真制动时间对比图 虽然制动距离和制动时间在仿真和实车试验中均有一些误差,但是偏差普遍较小,可以认为仿真制动效果和实车制动的效果基本一致,仿真模型具有很好的真实性.通过实车试验与仿真的对比分析,也侧面反映了电动汽车AEB仿真平台的有效性. 为了验证AEB控制策略的效果,通过联合仿真验证AEB控制策略的可行性,联合仿真平台见图8. 图8 AEB仿真平台示意图 基于融合算法的AEB控制策略包含了路面附着系数的因素,为了验证控制策略在不同路面附着系数下的效果选取4个不同的典型路面:干沥青、湿沥青、雪地和冰面作为测试路面,并使用C-NCAP中规定的工况进行测试,设定 AEB仿真测试的评价指标有:速度减少率、两车最小相对距离、预警时间. 前车静止、前车匀速、前车减速三种典型场景仿真测试示意图如图9所示.前车静止,两车初始相对距离设定为50 m,后车分别以20、30、40 km/h的速度靠近前车;前车匀速行驶,两车初始相对距离设定为50 m,前车以20 km/h的速度向前行驶,后车分别以30、45、65 km/h的速度靠近前车;前车减速行驶,前车后车均以50 km/h的速度行驶,然后前车突然以4m/s2的减速度紧急制动,两车初始相对距离分别为12 m和40 m. 图9 C-NCAP中AEB项目测试场景示意图 AEB仿真测试中要求两车位于同一条平直的道路上且一前一后,其中后车搭载了基于融合算法的AEB控制策略.根据C-NCAP中对AEB测试的规定,可以具体分为8个工况,如表4所示. 表4 C-NCAP中AEB项目测试工况 测试内容包括4种算法,将C-NCAP中包含的8个工况,分别在4个典型路面上进行测试,最多可以有32种情况. 1)速度减少率测试. 速度减少率是指实际碰撞时的速度与制动前两车相对速度减少的百分比,速度减少率越大,表示避撞的效果越好.速度减少率达到100%表示完全避撞,速度减少率为0时表示两车相撞.各算法在不同路面下的速度减少率如图10所示. 图10 各算法在不同工况下的速度减少率 在低附着系数验证方面由于雪地和冰面的路面附着系数很低,有两个工况中前车4m/s2的减速度无法实现,所以雪地和冰面路面下只能在CCRs和CCRm的工况下进行仿真测试,根据表4对应的工况划分,则仿真的工况包括干燥沥青路面条件下8种工况、湿沥青路面条件下8种工况、雪地条件下6种工况、冰面条件下6种工况,总计28种情况.从图中可知优化的安全距离和TTC融合算法可以较好地适应不同的路面,使用该算法时仅在冰面下的CCRs_3工况下的速度减少率为95.602%,而在其他的工况下均实现了完全避撞.其他三个算法在雪地和冰面上速度减少率较低,避撞效果不显著. 2)两车最小相对距离测试. 四种算法在C-NCAP全部测试场景下,在干沥青和湿沥青两个路面下的最小相对距离如表5所示.由表5可知安全距离算法和TTC算法在路面附着系数大时在停车距离上表现得相对比较保守,作者提出优化的安全距离算法和TTC融合算法可以很好地适应路面变化,并且可以保证最小相对距离在0.6~1 m之间是较为理想的. 表5 两车最小相对距离 优化的安全距离和TTC融合算法在速度减少率和两车最小相对距离两项评价指标中表现出色,主要是由于考虑了路面附着系数的影响,而其他的算法策略中没有考虑.优化的安全距离和TTC融合算法要求汽车可以实时获取路面附着系数,进而把参数代入到算法之中,当判断到路面附着系数小时,系统会提前预警及提前自动制动,避免因路面附着系数小导致制动时间和制动距离过长而引起相撞. 3)预警时间测试. 测试中四种算法的预警时间如表6所示.安全距离算法在前车静止和前车匀速工况下预警的效果不是很理想,过早或过晚的预警会降低驾驶舒适性[19].含有TTC的算法可以很好地控制预警时间,驾驶员的感受会更好.但是未优化的算法在最后两种工况下表现得都不是很好,尤其是CCRb(12 m)的工况,预警时间都比较短.经过算法优化后,可以较好地弥补这个问题,即当前车开始制动时,会适当增大TTC的阈值,这样就可以适当增加预警时长,在欧洲新年评价规程E-NCAP中[20]指出预警时间达到1.4 s可以满足95%的测试者预警反应时间,预警时间在2 s左右可以满足100%的测试者预警反应时间,因此预警时间在1.4 s以上既能满足E-NCAP中法规要求,又能在预警时间效果上提升舒适性[21]. 表6 预警时长 综合以上测试结果可知,基于融合算法的AEB控制策略,能够在C-NCAP中规定的AEB测试场景中实现避撞,且算法策略在速度减少率、两车最小相对距离、预警时间三个指标上对于经典算法来说具有较大改进,提升了汽车的安全性以及驾驶员感受的舒适性,并能较好地适应低路面附着系数的路面.测试结果基本符合预期的设计要求,具有一定的实际应用价值. 1)为了适应不同的路面对安全距离算法进行了优化,实现了在低附着系数路面自动紧急制动,在C-NCAP规定的全部测试场景下基于融合算法的AEB控制策略可以在干沥青和湿沥青两个路面下实现完全避撞. 2)基于融合算法的AEB控制策略在预警时间方面对于经典算法具有较好的改进效果,可以将预警时间控制在1.4s~2s之间,满足E-NCAP中法规要求,又能在预警时间效果上提升乘车舒适性.
2 仿真验证与结果分析
2.1 仿真平台的建立及验证


2.2 控制算法的验证及分析
3 结论
猜你喜欢
车主之友(2023年2期)2023-05-22 02:50:34
汽车实用技术(2022年19期)2022-10-19 07:46:24
内燃机与配件(2021年11期)2021-09-10 07:22:44
能源工程(2020年6期)2021-01-26 00:55:22
内燃机与配件(2020年20期)2020-09-10 07:53:49
今日农业(2019年12期)2019-08-13 00:50:02
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
现代园艺(2017年22期)2018-01-19 05:07:01
通信电源技术(2016年1期)2016-04-16 04:57:26