
基于电力电子变压器的电网建模和稳定性分析
2022-01-22 09:15刘星琪窦真兰迟福海邓任任徐若凯邹志翔
北京交通大学学报 2021年6期
刘星琪,窦真兰,迟福海,邓任任,汤 建,徐若凯,邹志翔,王 政,程 明
(1.东南大学 电气工程学院,南京 210096;2.国网上海市电力公司,上海 200122;3.南瑞集团(国网电力科学研究院)有限公司,南京 211106;4.国电南瑞科技股份有限公司,南京 211106)
随着新能源发电系统在电网中的高度渗透,电网结构日益复杂以及电压等级变化繁杂,传统变压器已无法满足人们需求[1].电力电子变压器以其能提供隔离保护、改善电压质量等显著优势[1-2],逐步替代传统变压器.但是,SST低压侧变换器会与接入的变换器产生多时间尺度耦合问题,而目前缺乏对此类系统的建模和稳定性分析,需对此类系统进行研究并为各类变换器控制设计提供基础.
在系统建模方面,多采用小信号建模方法建立系统模型.小信号建模方法主要分为两类:基于状态空间方程的时域法和基于阻抗模型的频域法[3].状态空间方程的建立需要变换器内部详细的结构和参数,而目前部分厂商对变换器内部实施技术保密,难以获得变换器完整的状态空间方程,因此,状态空间方程的应用受到一定的限制.而系统阻抗模型既能通过内部参数的求解获取又能通过测量系统外端口特性得到,具有一定的理论价值和实践意义,在变换器建模方面受到广泛关注.Wen等[4-6]研究了考虑锁相环(Phase-Locked Loop, PLL)影响时,电压跟随型变换器阻抗建模方法.曾志杰等[7]在原有电压跟随型变换器阻抗建模的基础上建立电压跟随型变换器简化阻抗模型,简化了计算并强调阻抗模型与物理意义之间的联系.Wang等[8]给出电压跟随型变换器在三相平衡和三相不平衡情况下的通用建模方法.Cavazzana等[9]建立采用下垂控制策略的电压支撑型变换器阻抗模型,并用阻抗测量验证其正确性.王施珂等[10]将相角作为输入量,建立电压、电流以及相角三者之间的模型,分析系统动态效应.目前,变换器阻抗建模理论已相当完善.
在系统稳定性分析方面,Wen等[4]研究电压跟随型变换器连接大电网时,改变电压跟随型控制参数对系统稳定性的影响.王施珂等[10]研究多个电压支撑型变换器并联并网时,控制参数对系统稳定性的影响.Zou等[11]利用根轨迹对两个级联的电压跟随型变换器进行稳定性分析,研究了不同带宽时两个变换器之间的耦合作用以及当带宽不同时,两个变换器对稳定性的影响程度.Rosso等[12]利用根轨迹分析了参数与特征根之间的敏感性.目前,大多数文献都是对不同节点直接连接大电网进行研究,鲜有文献研究不同节点连接SST时整体系统的稳定性,并且基本都是讨论单一参数对系统稳定性的影响,没有分析控制参数对系统稳定性的影响程度.
针对现有研究的不足,本文作者分析了不同节点连接SST时线路参数和控制参数对系统稳定性的影响,并且探究了线路长度和控制参数对系统稳定性的敏感程度,分析线路长度和控制参数之间的交互影响.
1 基于SST的低压电网阻抗模型
1.1 PQ节点阻抗模型
电压跟随型变换器拓扑结构见图1,由于其有功功率和无功功率通常保持恒定,能等效为PQ节点.图1中,Vdc为直流电压源,Lf为滤波电感,iabc为流入公共耦合点(Point of Common Coupling, PCC)的电流,vabc为PCC处的电压,Pref为有功功功率参考值,Qref为无功功率参考值,idref为d轴电流参考值,iqref为q轴电流参考值,vrdq为电流环输出值,wo为角度参考值,θ为相角,Si(i=1,2,…,6)表示6个开关管对应的开关信号.由于电压跟随型变换器中功率环的带宽较大,因此在对PQ节点进行阻抗建模时,忽略功率环对阻抗模型的影响.

图1 电压跟随型变换器拓扑结构
当PLL输出相角不再与电网电压相角一致,存在相角误差Δθ时,系统存在两个参考dq坐标系,两个参考dq坐标系位置关系见图2.一个是系统侧dq坐标系,与PCC点电压同步;另一个是控制器侧dq变换器,与PLL输出相角同步.并且两个坐标系下的电压向量满足一定关系,表示为

图2 系统侧和控制器侧dq坐标系关系
(1)
式中:上标c表示控制器侧dq轴下的电压电流量;上标s表示系统侧dq轴电压电流量;vd和vq表示PCC点电压.
当系统有扰动产生时,两边电压向量为
(2)
式中:Vd、Vq表示稳态电压量;Δvd和Δvq表示电压扰动量.
将式(2)化简为
(3)
然而
(4)
式中:kpPLL为PLL比例增益系数;kiPLL为PLL积分增益系数;s为拉普拉斯域复变量.
将式(3)带入式(4),可得
(5)
式中:GPLL为PLL闭环传递函数,其表示为
(6)
将式(4)带入式(3),可得
(7)
令
(8)

(9)
(10)
(11)
令
(12)
(13)

根据PLL对各个电压电流向量的影响以及拓扑结构中各个向量之间的电气关系,可得到PQ节点阻抗模型,PQ节点阻抗模型见图3.图3中,Δidq_ref表示电流参考值扰动向量,Δidq为流入PCC的电流扰动向量,Δvdq为PCC处的电压扰动向量,Δvrdq为电流环输出扰动向量,GPI表示PI控制器矩阵,Gdel表示延迟函数矩阵,YL表示电感导纳矩阵.

图3 PQ节点阻抗模型
(14)
(15)
(16)
式中:kp为电流环比例增益;ki为电流环积分增益;Ts为采样时间;ws为系统角速度.
根据图3,PQ节点阻抗矩阵Z表示为
(E+YLGdelGPI)
(17)
式中:E表示为二阶单位矩阵.
1.2 PV节点阻抗模型


图4 电压支撑型变化器拓扑结构
与PQ节点类似,由于功率环的存在,PV节点同样存在两个dq轴,并且电压向量关系式满足式(1)和式(2).但是在PV节点中Δθ与有功功率存在关系为
(18)
式中:ΔP表示有功功率扰动量.
而ΔP与变换器输出电压电流有关,表示为
(19)
将式(18)和(19)带入式(3)得到
(20)
(21)
同理
(22)
联立式(20)和式(22)得
(23)
(24)
同理,
(25)
(26)
式中:ILd、ILq表示变换器输出电流滤波前的稳态电流量,Δid和Δiq变换器输出电流滤波前的电流扰动量,Gi(i=1,2,…,8)表示有功功率环对需要Park变换和Park反变换的电压电流向量的影响,表示为
(27)
(28)
(29)
(30)
(31)
(32)
(33)
(34)
在实际控制中,d轴参考电压由无功功率环产生,q轴参考电压直接给定为0.无功功率与d轴参考电压的关系为
(35)
式中:ΔQ表示无功功率扰动量.
(36)
将式(36)带入式(35)
(37)

(38)
(39)
(40)
(41)


(42)
(43)
(44)
式中:kpv表示电压环比例增益;kiv表示电压环积分增益;kpi表示电流环比例增益;kii表示电流环积分增益.
根据图5,PV节点的阻抗矩阵表示为
(45)
1.3 平衡节点阻抗模型
由于SST中大电容的存在,中压侧和低压侧可实现解耦,高压级和隔离级能等效为直流稳压源,此时,SST拓扑结构见图6,SST低压侧变换器电压幅值和频率保持恒定,可视作平衡节点.与PQ和PV节点不同的是SST的电压参考值和频率由调度直接给定,不再由功率环或者PLL得到,因此系统侧和控制侧两个dq轴完全重合,无需考虑Δθ对整个模型的影响.根据系统拓扑结构中各个向量之间的电气关系,可得到阻抗模型见图7.图7中,Δvref表示电压参考值向量.根据图7得到,系统的阻抗模型为

图7 平衡节点模型
(46)
2 稳定性分析
根轨迹广泛应用于系统稳定性分析[11],根据系统闭环主导极点所在位置判断系统是否失稳.此外,闭环主导极点离虚轴的远近能在一定程度上反映系统的稳定裕度,可以以此来判断参数对系统稳定性的影响程度.
2.1 PQ节点稳定性分析
当SST与PQ节点相连时,根轨迹随线路长度变化见图8.当线路阻抗比R/X小于1时,线路长度从0 m逐渐增加到3 000 m,根轨迹进入右半平面,系统由稳态变为失稳.当R/X大于1时,线路长度从0 m增加到12 000 m,根轨迹进入右半平面,系统由稳态变为失稳.无论R/X大于1,还是小于1时,随着线路阻抗的增加,系统稳定性会逐渐变差,直至失稳.这是由于电压跟随型变换器适用于强电网,电网强度越弱,电压跟随型变换器稳定性越差.

图8 改变线路长度时系统根轨迹变化(PQ节点)
分析线路长度对系统稳定性的影响时发现,在不同阻抗比情况下,线路长度的增加会导致系统失稳,但是在不同阻抗比条件下,系统失稳所需的线路长度各不相同,因此有必要对线路阻抗比进行进一步分析.分析阻抗比R/X与系统稳定性裕度之间的关系,见图9.系统稳定性裕度定义为系统闭环主导极点离虚轴的距离.闭环主导极点离虚轴越近,系统稳定性裕度越低;闭环主导极点离虚轴越远,系统稳定性裕度越高.比较图9(a)和图9(b)发现,R/X小于1时,系统的稳定性裕度大部分都在500以下,R/X大于1时,系统的稳定性裕度都在500以上,说明该系统适用于阻性线路.

图9 稳定性裕度的变化(PQ节点)
改变SST电压环比例增益kpv时,系统根轨迹见图10.当kpv从0.001增加到1时,根轨迹进入右半平面,系统由稳态变为失稳.随着kpv的增加,系统稳定性越来越差,直至失稳.

图10 电压环kpv变化时的系统根轨迹图(PQ节点)
2.2 PV节点系统稳定性分析
当SST与PV节点相连时,根轨迹随线路长度变化见图11.当R/X小于1时,线路长度从0 m逐渐增加到3 000 m,系统稳定.当R/X大于1时,线路长度从0 m增加到12 000 米,系统稳定.无论R/X大于1,还是小于1时,随着线路长度的增加,系统会重回稳态.这是由于电压支撑型变换器适用于弱电网,在强电网下会失稳.

图11 改变线路长度时系统根轨迹变化(PV节点)
R/X与稳定性裕度的关系见图12.稳定性裕度小于0说明极点进入右半平面,此时系统失稳.当稳定性裕度小于0时,稳定性裕度越小,说明系统失稳程度越严重,并且系统从失稳回归稳态时所需线路长度越长.比较图12(a)、(b)发现,R/X小于1的稳定性裕度大部分都比R/X大于1的稳定性裕度大,说明在相同线路长度时,R/X小于1更容易导致系统失稳,该系统更适用于感性线路.
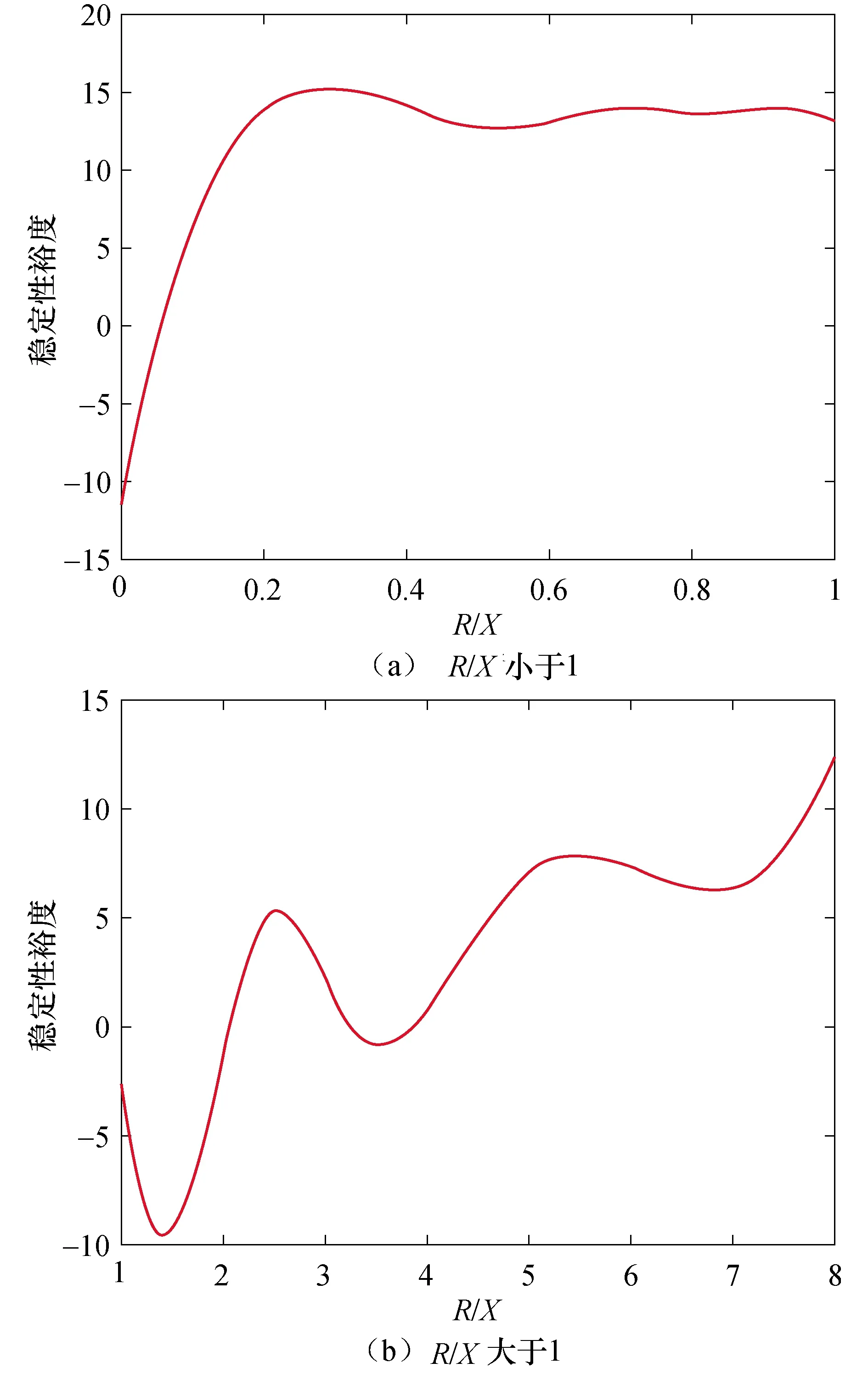
图12 稳定性裕度的变化(PV节点)
改变SST电压环kpv时,系统根轨迹见图13.当kpv从0.001增加到3时,根轨迹进入右半平面,系统由稳态变为失稳.随着kpv的增加,系统稳定性越来越差,直至失稳.

图13 电压环kpv变化时系统根轨迹图(PV node)
2.3 参数敏感性分析
分析线路长度和kpv对系统稳定性的影响时发现,系统失稳时两个参数变化的幅度大不相同,有必要对其进行参数敏感性分析,即判断参数对系统稳定性的影响程度.为分析kpv和线路长度对系统稳定性的影响程度,引入敏感性概念.敏感性定义为改变参数时,对应主导极点横坐标的变化率,即dσ/dx.其中,x为kpv和线路长度,σ为主导极点横坐标.
当SST连接PQ节点时,kpv和长度的敏感性见图14.敏感性为负,表示参数不利于系统稳定性.kpv的敏感性与长度之间有交互作用.且随着kpv和长度的增加,kpv的敏感性越大.长度的敏感性基本不受kpv影响,且随着长度的增加,敏感性越来越强,但kpv的敏感性始终高于线路长度的敏感性.
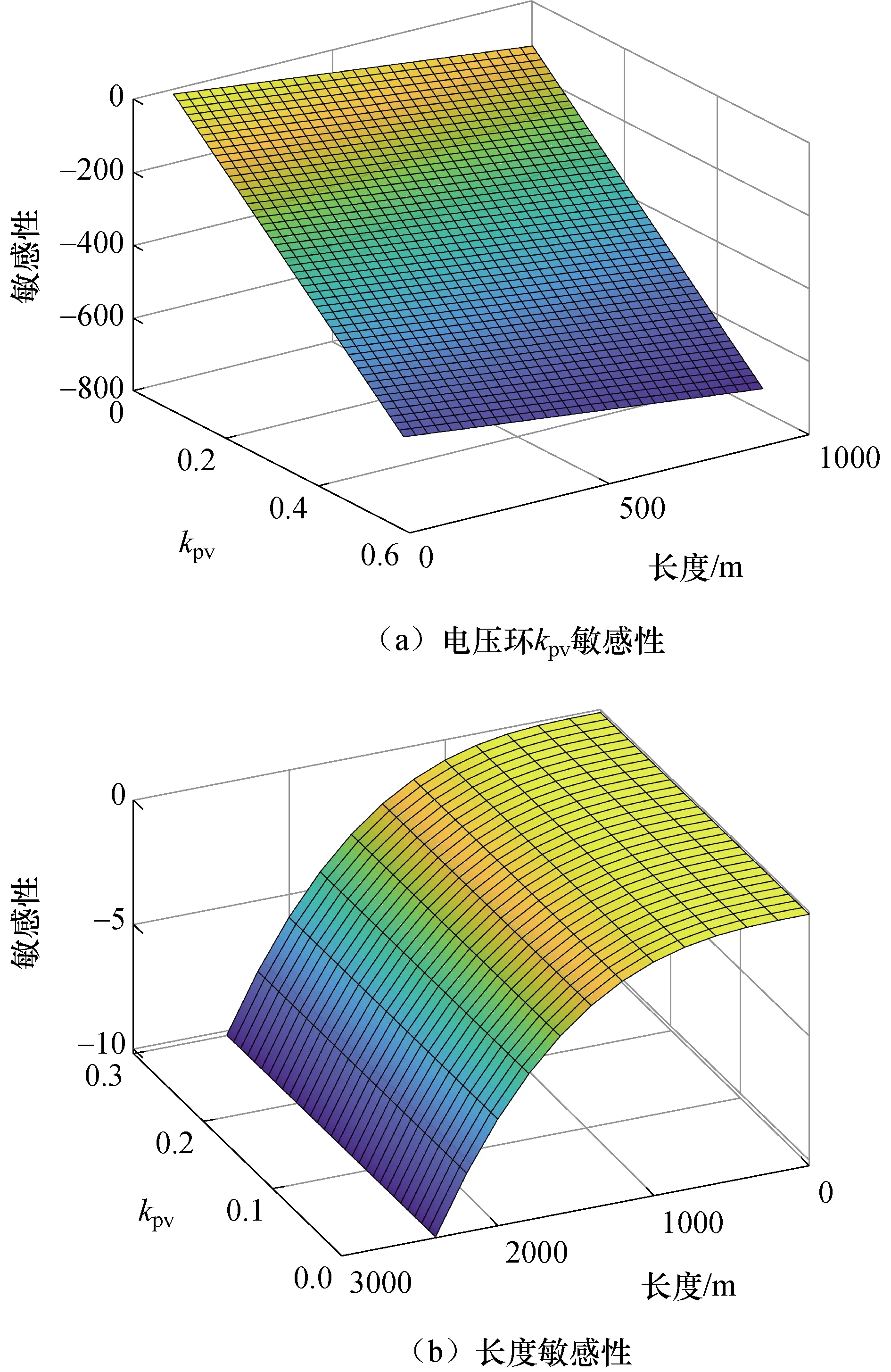
图14 参数敏感性(PQ节点)
当SST连接PV节点时,kpv和线路长度的敏感性见图15.kpv的增加不利于系统稳定性,且其对系统的影响程度基本不受线路长度影响,随着kpv的增加,其敏感性越来越强.线路长度的增加有利于系统稳定性,但敏感性变化微乎其微,可看作线路长度的敏感性基本保持不变.对比kpv和线路长度敏感性发现,kpv的敏感性远远强于线路长度的敏感性.

图15 参数敏感性(PV节点)
综上而言,线路阻抗和系统控制参数对稳定性影响见表1.

表1 结论
3 仿真分析
为了验证之前所得结论的正确性,利用Matlab/Simulink仿真软件对SST进行仿真验证.各个节点对应变换器的参数见表2.

表2 仿真参数
当SST连接PQ节点时,增加线路长度时,SST输出电压和电流见图16(a)和图16(b).当线路长度从200 m增加到20 000 m时,系统失稳.将kpv从0.05增加至3时,SST输出的电压和电流见图16(c),此时系统失稳.
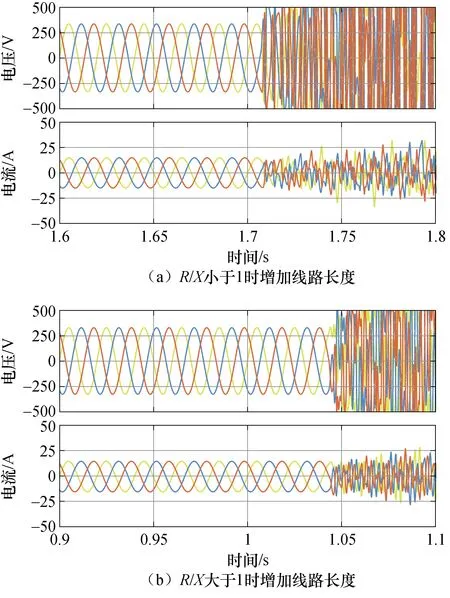
图16 电压和电流变化(PQ节点)
当SST连接PV节点时,减少线路长度,SST输出电压和电流见图17(a)和图17(b).
当线路长度从10 000 m减少到100 m时,系统失稳.将kpv从0.05增加至3时,线路中的电流和SST输出的电压见图17(c),此时,系统失稳.改变线路长度,系统产生低频振荡,并且当电流值振荡到一定程度时才引起系统电压振荡.改变kpv,系统产生高频振荡,电压电流在同一时间失稳.
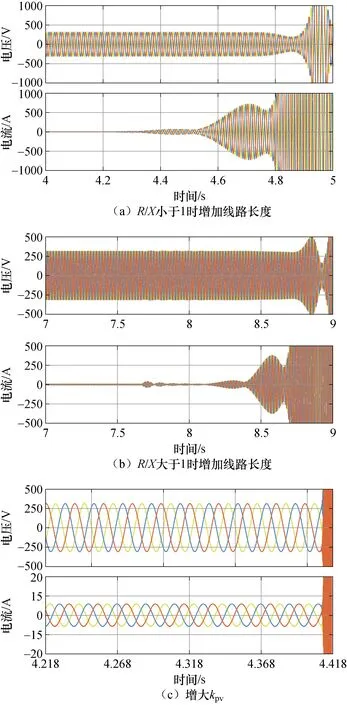
图17 电压和电流变化(PV 节点)
4 结论
建立了新型PV节点和新型PQ节点以及SST低压侧变换器复频域阻抗模型.在变换器阻抗模型的基础上,讨论了SST分别连接PV和PQ节点时线路阻抗和SST电压环kpv对系统稳定性的影响.所得结论如下:
1)当SST与PQ节点相连时,无论阻抗比大于1还是小于1,增加线路长度不利于系统稳定性;当SST与PV节点相连时,无论阻抗比大于1还是小于1,增加线路长度有利于系统稳定性.
2)当SST连接不同节点时,阻抗比与稳定性裕度之间并不是单一的线性关系.当SST与PQ节点相连时,该系统更适用于阻性线路;当SST与PV节点相连时,该系统更适用于感性线路.
3)随着kpv的增加,SST与PQ节点相连时和SST与PV节点相连时系统的稳定性裕度在不断下降直至失稳.
4)当SST分别与PQ节点和PV节点相连时,kpv对系统稳定性的影响强度远大于线路长度.
猜你喜欢
小学生学习指导(低年级)(2020年10期)2020-11-26
数学小灵通(1-2年级)(2020年9期)2020-10-27
中国有色金属学报(2018年2期)2018-03-26
作文大王·低年级(2017年11期)2017-12-05
小学生学习指导(低年级)(2017年12期)2017-11-22
电测与仪表(2016年2期)2016-04-12
焊接(2016年1期)2016-02-27
核科学与工程(2015年2期)2015-09-26
新闻传播(2015年8期)2015-07-18
肿瘤预防与治疗(2014年2期)2014-11-24
