列控车载设备测速测距同步表决技术研究
2022-01-22 08:57杨志杰莫小凡郑理华
铁道标准设计 2022年1期
张 淼,杨志杰,莫小凡,郑理华
(1.中国铁道科学研究院研究生部,北京 100081;2.中国铁道科学研究院集团有限公司通信信号研究所,北京 100081;3.中国铁道科学研究院集团有限公司标准计量研究所,北京 100081)
引言
测速测距系统是列控车载设备控制列车安全运行的前提和基础,完成列车运行速度、走行距离等信息的计算[1],由于测速测距系统对安全性和可靠性要求高,采用安全计算机平台设计是必然趋势,同步表决技术是平台的关键技术之一。
目前,使用最多的列控车载设备安全计算机平台是二乘二取二和三取二结构。其中,二乘二取二结构在可靠性和安全性上有明显优势[2-3],在列控车载系统、联锁系统、25 Hz轨道电路采集系统中已得到广泛应用[4-6]。二乘二取二结构中的2个MCU(微控制单元)同步技术是冗余设计的核心,是表决的基础,主要有时钟同步和软件任务级同步,时钟同步又包括紧耦合同步和松耦合同步[7]。蔡煊等[7]采用公共外时钟作为参考时钟信号,基于时钟漂移率有界模型对本地时钟进行漂移补偿;陈梅等[8]设定了任务起始、输入数据和运算输出3个同步点,通过比较数据的一致性来判断单机是否故障;杨芳萍[9]设计了基于动态表决控制算法,实现了多通道系统中的动态同步。
数据表决方法方面,王瑞等[10]通过采用拼接方式进行输出来确保数据的安全性和可靠性,可见主从MCU的计算结果必须完全一致。然而数字量的同步表决方法不能满足测速测距系统的要求,杨文阁[11]等针对模拟量的特点,提出容差范围内选取主处理单元数据的处理方式,容差范围外按照故障安全原则采取措施;袁顺[12]等将大量表决算法分类为标准型、混合型和特定型表决算法,同时横向比较了算法的复杂度及可靠性;孙军[13]设计了一种基于历史信息的改进型带权重值的表决算法,记录历史数据有效次数并动态分配权重值,当某个表决周期中存在数据失效时,仍可得到有效的表决输出结果。
本文以3个测速测距周期为单位进行任务交互,结合测速测距物理量的意义,给出速度、距离的差异限制条件。在规定周期内,根据表决结果判定单系的表决状态,分别使用内插和外推法、最小二乘拟合法和最大速度法进行表决输出,利用实验室测速测距平台实现对比测试。研究成果可为测速测距平台提供一种同步表决方法。
1 平台同步处理
1.1 平台搭建
实验室搭建了一套基于二乘二取二安全计算机平台的测速测距系统,主备系冗余设计,每系中包含2个MCU,为避免2个MCU在同一系运行时存在潜在的共因失效[14],测速测距系统2个MCU拥有独立的电源和晶振。每个MCU独立运算,并将各自的计算结果,包含列车运行速度、速度的置信区间、走行距离和距离的置信区间等,通过SPI接口完成任务级同步,收到对方MCU的数据后进行数据表决。若表决通过,则将最终表决输出结果通过CAN总线发送给主机;若表决未通过,则发送故障信息。系统结构如图1所示。
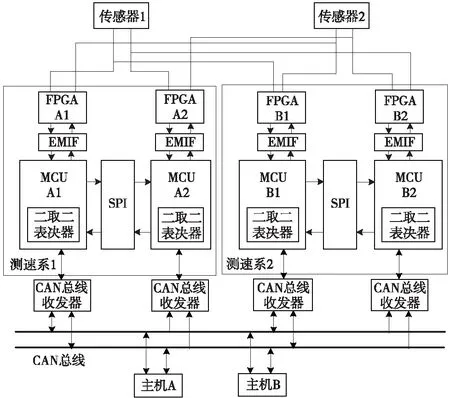
图1 二乘二取二测速测距系统结构
1.2 任务级同步
为满足测速测距系统对实时性和精度的要求,采用系内的任务级同步,通过在任务中设立1个或多个表决点进行同步比较来完成一致性检查[15]。
2个MCU独立运算,由于测速测距系统对计算结果精度要求高,每个MCU运行周期短,如果每个周期多个任务点表决,会带来系统的开销负担。测速测距系统需实时上传速度、距离信息到列控车载主机,考虑到主机数据接收处理能力和测速测距精度要求,故设定3个测速测距周期为一个任务周期。
SPI接口输入输出设置不同存储单元,SPI必须满足接收到对方信息后才能发送的机制,这样读写操作就可以分时进行,在输出处设置同步检查点进行数据交互,如果在规定时间内收到信息,则判定为2个MCU同步,否则判定为异步[16]。任务级同步允许处理器之间存在一定容许范围内的异步度[7]。
任务级同步划分为初始化阶段和正常执行阶段,2个MCU分别记为MCUA和MCUB,如图2所示。

图2 任务级同步过程
同步过程:
Step1初始化阶段,第一次计算得到速度和距离后,记录本地时间戳T1;交互得到对方时间戳T2,计算初始化阶段时间戳偏差ΔT=|T1-T2|;
Step2对2个MCU进行同步校正,比较2个MCU的时间戳,在较小时间戳基础上增加ΔT;
Step3正常执行阶段,2个MCU各自计算速度、距离,交互时间戳和计算结果,进行数据表决,并将表决结果和单系状态信息发送给对方MCU;
Step4各自判断2个MCU的表决状态,若均为正常态,则MCUB计算CRC,MCUA将表决结果和MCUB计算的CRC拼成一帧数据,周期性输出并记录输出时间戳T3;
Step5 MCUB虽不输出,但记录对应输出时间戳为T4,交互时间戳,计算正常执行阶段时间偏差ΔT=|T3-T4|,若超过设定同步时间差阈值未收到回复信息,则转Step6,否则回Step2;
Step6同步失败,导向安全侧,输出本系故障信息。
2 数据表决方法
本次提出的一种速度和距离的数据表决方法是在安全平台设计和系内同步的前提条件下完成的,当二取二表决器接收到2个MCU的计算结果后,需依次判断数据是否有效,单系所处的表决状态,用以确定表决输出的最终结果,对应本节介绍的表决条件、表决状态和表决输出3个部分。
2.1 表决条件
测速测距系统计算结果主要包含本周期计算结果时间戳(T_Datation)、上周期计算结果时间戳(T_Datation_before)、速度(V_Odo_Train)、速度上偏(Dv_Odo_Pos)、速度下偏(Dv_Odo_Neg)、距离、距离上偏和距离下偏等模拟量,无法通过一致性判断来表决,以速度为例给出差异限制条件,距离表决同理。
结合上述变量的物理意义,MCUA的速度范围为(A.V_Odo_Train-A.Dv_Odo_Neg,A.V_Odo_Train+A.Dv_Odo_Pos),MCUB的速度范围为(B.V_Odo_Train-B.Dv_Odo_Neg,B.V_Odo_Train+B.Dv_Odo_Pos)。
比较A.V_Odo_Train-A.Dv_Odo_Neg和B.V_Odo_Train-B.Dv_Odo_Neg,其中,较大值设为max_min,较小值设为min_min;同理比较A.V_Odo_Train+A.Dv_Odo_Pos和B.V_Odo_Train+B.Dv_Odo_Pos,其中,较大值为max_max,较小值为min_max。
比较|A.Dv_Odo_Pos-B.Dv_Odo_Pos|和|A.Dv_Odo_Neg-B.Dv_Odo_Neg|,其中,较大值设为Offset。
测速测距速度相关量差异限制条件如下。
(1)若A.T_Datation<=A.T_Datation_before或B.T_Datation<=B.T_Datation_before,则时间判决异常,否则时间判决正常;
(2)若|A.V_Odo_Train-B.V_Odo_Train|>ΔVlim,2个MCU的速度差若超过速度差容忍门限,则速度超限;
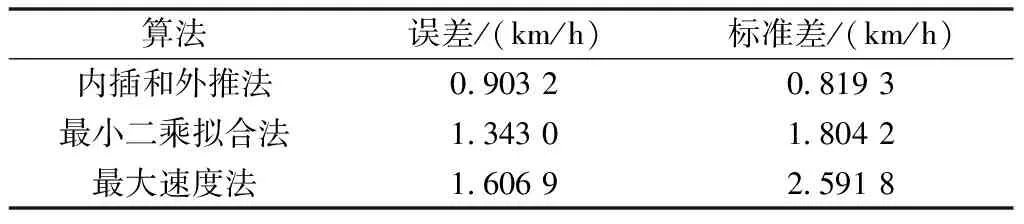
(3)当列车速度≥速度阈值,一般设为5 km/h,若min_max 图3 速度误差异常判定示意 (4)若Offset>Offsetlim,则速度误差超限。 测速测距的单系状态由2个MCU的数据表决结果推得,包含初始化态、正常态、转换态和故障态4种状态,工作状态切换关系如图4所示。 图4 测速测距系统状态切换关系 在判断单系状态前,首先要对每个MCU的计算结果进行判断,若计算结果未越界且有效,则此MCU的状态为正常态,否则为故障态。 二取二系内的2个MCU中,若任意1个MCU为初始化态,则该系状态为初始化态;若任意1个MCU为故障态,则该系状态转为故障态;数据表决结果中若有1个表决条件不满足,则系统进入转换态;进入转换态后计时,若3个周期内仍没有恢复为正常态,则系统进入故障态。 测速测距单系的4种不同表决状态决定了表决输出结果:当表决状态为初始化态时,赋初始值输出;当表决状态为故障态时,赋默认值输出;当表决状态为正常态或转换态时,需要通过算法计算表决输出结果。 目前,实际工程中普遍应用最大速度法,当2个MCU计算的速度不完全一致时,导向安全侧,选其中速度较大值作为输出。选取内插和外推法[17-18]、最小二乘拟合法和最大速度法进行对比,得到最优的表决输出算法。最小二乘拟合法是以MCUA和MCUB本周期和上周期的计算结果作为拟合点,由于列车运动存在惯性,速度在短时间内不会发生突变,故估计列车运行速度为线性函数v=a0+a1t,解得a0、a1,代入车载主机当前时间Ttrain,即可求得列车运行速度Vtrain=a0+a1×Ttrain,走行距离是速度随时间积分。 车载主机需实时监控列车的运行速度和走行距离,对测速测距精度要求很高。测速测距单系2个MCU间只是任务级同步,无法做到时钟同步,采用内插法可以得到任意时刻测速测距系统计算的速度和距离值。车载主机和测速测距系统间不可避免地存在通信延时,影响测速测距精度,故需用当前测速测距系统得到的速度进行外推,得到可供车载主机使用的准确列车运行速度和走行距离。 设MCUA上一周期、当前周期两点Apre、Arec的坐标分别为(TApre,VApre)、(TArec,VArec),由图5可以看出,MCUA当前时间TArec比MCUB当前时间TBrec超前。 图5 内推外插法示意 由拉格朗日一次多项式[19],可得MCUB当前时间TBrec时刻的内插速度Vin (1) 若运行方向向前,Brec的内插走行距离Sin为 Sin=SArec-Vin×(TArec-TBrec) (2) 若方向向后,Brec的内插走行距离Sin为 Sin=SArec+Vin×(TArec-TBrec) (3) 若方向未知,Brec的内插走行距离Sin为 (4) 由于通信延时的存在,需采用外推法来得到准确的实时速度,设测速测距输出时间为Tin,车载主机当前时间为Ttrain=Tin+Tdelay,车载主机与测速测距的时间差为ΔT=Ttrain-Tin,外推得到的列车速度为 Vex=Vin+ΔT×ACC (5) 其中,ACC为列车运行的加速度。若正向运行,外推得到的走行距离为 (6) 若反向运行,走行距离为 (7) 利用实验室搭建的基于二乘二取二安全计算机平台测速测距系统,模拟实际列车运行进行测试。在任务级同步的基础上,利用表决条件判定表决状态,单系处于正常态或转换态时,分别采用内插和外推法、最小二乘拟合法和最大速度法进行表决输出。通过数据分析,列车运行过程中加速度变化点算法对比明显,加速度从恒速变为正加速度时,运用3种算法得到的列车运行速度对比如图6所示。 图6 3种方法的列车运行速度对比 由图6可以看出,内插和外推算法不仅能内插得到测速测距系统任意时刻的速度值,还充分考虑了通信延时,外推得到可供车载主机使用的列车实时运行速度,在加速度变化点均满足安全需求且精度更高。最小二乘拟合法,在速度变化时容易沿着速度的变化趋势继续推算,得到误差较大的速度值,即列车由匀速到加速运行过程中,列车运行速度高于真实值;列车由匀速到减速运行过程中,运行速度低于真实值。最大速度法并没有充分考虑测速测距系统和车载主机间的通信延时,单一的选取最大速度作为计算结果看似考虑了安全侧,实际上浪费了系统资源,还会在计算距离时累积较大的误差,造成定位错误。 表1列出了3种算法的误差对比结果,内插和外推法速度误差为0.903 2 km/h,标准差为0.819 3 km/h;最小二乘拟合法的速度误差为1.343 0 km/h,标准差为1.804 2 km/h;最大速度法的速度误差为1.606 9 km/h,标准差为2.591 8 km/h。CTCS-2级列控车载设备技术条件[20]要求列车速度高于30 km/h时,测速误差不大于2%,选取的列车平均运行速度为120 km/h,上述算法均满足要求,但内插和外推法的误差和标准差较小,更接近真实值,故选取内插和外推法作为2个MCU表决输出算法。 表1 3种方法结果对比 综上所述,提出的内插和外推法是更优的表决输出算法,得到的列车运行速度具有更高的精度且能满足安全需求。 (1)基于二乘二取二安全平台的列控车载设备测速测距系统,以3个测速测距处理周期为任务组成循环队列,实现2个MCU间的任务级同步,保证了系统的安全性和可靠性。 (2)针对列车运行速度的物理特性,提出了差异限制条件,包括时间判决异常、速度超限、速度误差异常和速度误差超限。周期性检查表决结果,得到单系的表决状态。 (3)当单系处于正常态或转换态时,分别采用内插和外推法、最小二乘拟合法和最大速度法表决输出,通过结果对比表明,提出的内插和外推的表决输出算法能在满足安全需求条件基础上,得到精度更高的计算结果。
2.2 表决状态

2.3 表决输出


3 验证及对比分析

4 结语
猜你喜欢
导航定位学报(2022年4期)2022-08-15
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2020年7期)2020-02-06
科学(2020年3期)2020-01-06
小天使·三年级语数英综合(2017年6期)2017-06-07
小天使·三年级语数英综合(2017年6期)2017-06-07
电子制作(2017年7期)2017-06-05
新民周刊(2016年20期)2016-05-25
太空探索(2014年1期)2014-07-10
火炸药学报(2014年3期)2014-03-20