
基于径向基函数神经网络的无人直升机吊装系统滑模减摆控制
2022-01-20 06:08吴庆宪邵书义
应用科学学报 2021年6期
刘 楠,陈 谋,吴庆宪,邵书义
南京航空航天大学自动化学院,江苏南京211106
相对于无人直升机系统而言,无人直升机吊装系统增加了吊挂负载后,整个系统变成了高度耦合、欠驱动的非线性系统。吊挂负载会因无人直升机机动或者外部干扰等因素产生振荡[1],而负载振荡会影响无人直升机飞行性能甚至会威胁飞行安全。因此无人直升机吊装系统的减摆控制成为了无人机飞行控制领域的研究热点与难点之一。
文献[1-3]建立了直升机/刚性吊索/刚体吊挂物全耦合飞行动力学模型,并从气动导数和运动模态分析了吊挂物对直升机的影响。文献[4]基于单质点吊挂假设下建立直升机/吊挂耦合模型,在直升机吊挂系统处于不同状态下,采用直接配平和数值分析方法得到了负载引入对直升机各个模态的影响值。文献[5]完成了基于Kane 方法的直升机/柔性绳索/吊挂物动力学建模,得到在不同前飞速度下的配平状态,分析运动模态并进行仿真验证及对比。文献[6]建立了直升机吊装系统直线/平面/空间3 种动力学方程,并设计了基于指令光滑技术的控制器,且能够实现负载振荡抑制。文献[7]建立了直升机/吊挂耦合系统飞行动力学模型,在此基础上进行耦合系统的配平和线性化,并基于PID 控制方法设计了一套能够改善直升机/吊挂物耦合系统稳定性的飞行控制律。文献[8]提出了一种自抗扰控制器的设计方法,利用改进遗传算法优化参数,能够实现在线估计参数不确定性和外部干扰值,通过在控制器中设计补偿项以达到减小误差的目的。文献[9]基于反步法设计了非线性控制器实现了直升机轨迹跟踪,并通过抗扰时延反馈控制实现了负载振荡抑制。国内外还有很多学者对无人直升机吊装系统进行研究并取得了很多有意义的研究成果[10-13],如文献[10]将无人直升机吊装系统分为直升机子系统和吊挂物子系统,分别设计了滑模反步控制器以实现减摆目的。文献[11]通过对无人直升机吊装系统设计非线性轨迹跟踪控制器来达到减摆效果。文献[12-13]基于非线性控制理论设计了无人直升机吊装系统非线性减摆控制器,并进行了仿真验证。
在实际吊运过程中,无人直升机吊装系统会受到外界干扰的影响,并且由于存在模型误差、未知的元器件参数及测量噪声等不确定性,一般很难准确获得描述被控对象运动状态的数学模型,因此有必要针对存在干扰和模型不确定性的无人直升机吊装系统进行控制器设计。在已有的抗扰方法中,干扰观测器作为主动前馈抗扰方法之一,能够直接消除或减弱干扰对系统的不利影响,有利于反馈控制充分发挥其闭环调节能力,进而实现干扰的快速抑制,同时获得理想的控制性能[14-16]。在处理不确定性方法中,径向基函数神经网络以其强大的自主学习能力和能够有效逼近任意复杂的非线性函数的特点而被青睐[17-18],径向基函数神经网络在移动机器人、航空航天、化工医学等众多领域应用广泛。因此针对系统中存在干扰和不确定性的问题,有很多飞行控制文献提出了基于神经网络和干扰观测器的处理方法。例如:文献[15]针对近空间飞行器中饱和、不确定性、外界未知有界干扰和执行器故障,研究了基于RBFNNs 和干扰观测器的自适应滑模容错控制方法;文献[16]针对空天飞行器中存在不确定性的问题,研究了基于RBFNNs 干扰观测器的轨迹线性化方法,提高了常规的轨迹线性化控制方法的鲁棒性;文献[17]针对一系列非线性系统中存在干扰的问题,提出了基于干扰观测器的滑模控制方法;文献[18]针对具有输入饱和系统不确定性的多输入多输出非线性系统,设计了基于神经网络的自适应受限控制器。此外还有许多文献针对系统不确定性和干扰采用了神经网络或干扰观测器进行处理[19-20]。受上述文献启发,本文采用基于神经网络和干扰观测器的滑模控制方法来处理含有建模不确定和干扰的无人直升机吊装系统减摆控制问题。
关于无人直升机吊装系统控制问题,虽然已经取得不少研究成果,但还需进一步考虑以下问题:1)无人直升机吊装系统的线性模型是基于负载处于小角度摆动假设下得到的,且忽略了很多耦合非线性项,因此需要进一步研究无人直升机吊装系统的非线性控制方法;2)在实际过程中,无人直升机吊装系统存在未知有界干扰和建模不确定性需要处理。
综上所述,本文针对平面运动下无人直升机吊装系统存在外界未知有界干扰和建模不确定性问题,利用RBFNNs 和干扰观测器对其进行补偿;以吊装系统减摆为目的,设计了滑模减摆控制器;最后用Lyapunov 方法证明闭环系统的稳定性。
1 平面运动下无人直升机吊装系统动力学模型
对平面运动下无人直升机吊装系统如图1所示。
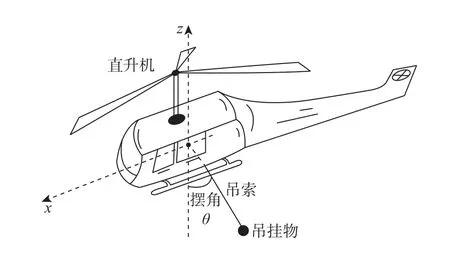
图1 无人直升机吊装系统Figure 1 Helicopter slung-load system
其拉格朗日模型[6]为

式中:Mh为无人直升机的质量;ml为吊挂负载质量;l为吊索长度;θ为吊挂负载后摆角;g为重力加速度;x,z分别为水平方向和竖直方向上的位移;ux,uz分别为水平方向和竖直方向上的控制量;bl,bh分别为吊挂负载阻尼系数和无人直升机阻尼系数,两者为正常数[6]。
1.1 无人直升机动力学模型转换
为方便设计干扰观测器及控制器,将式(1)~(3) 进行数学变换,可写成一般的仿射非线性形式[21-22],其具体表达式为

式中:q=[x z θ]T为系统状态向量;u ∈R2×1为系统控制量,f(q,˙q)∈R3×1,g(q)∈R3×2。u的表达式为

f(q,) 的表达式为
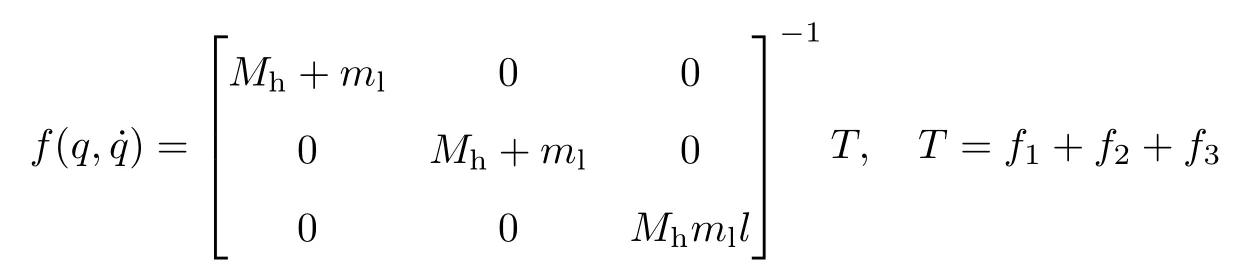
式中:
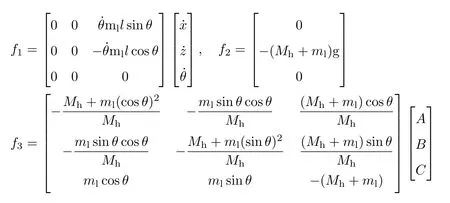
并且,有

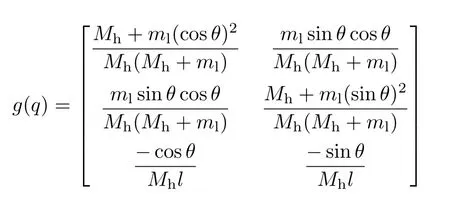
g(q) 的表达式为
考虑外界未知有界干扰d(t) 和系统建模不确定性Δf(q),简记为d和Δf,则式(4) 可写为

1.2 假设及引理
为设计基于神经网络和干扰观测器的鲁棒控制器,首先给出下面假设及引理。
假设1[15]在非线性系统(6) 中不确定性Δf光滑连续有界;
假设2[17]对于有界干扰d ∈R3×1,假设存在一个正常数δ使得‖˙d‖≤δ,式中:‖·‖为‖·‖2的简写,表示向量的二范数。
引理1[17]对于零时刻初始条件有界系统,若存在连续正定的Lyapunov 函数且满足

以及

则系统解x(t) 是最终一致有界。式(7)中的π1和π2为Rn →R 的K∞类函数,C1,C2为正常数。
引理2[18]由于RBFNNs 具有逼近连续非线性映射的能力,所以系统不确定性Δf及其估计值可以分别表示为

式中:q=[q1,q2,···,qm]T∈Rm×1为RBFNNs 的输入向量;∈Rn×n为设计的神经网络权值矩阵;φ(q)=[φ1(q),φ2(q),···,φn(q)]T∈Rn×1为高斯基函数,且满足‖φ(q)‖≤τ,τ为φ(q) 的上界;ε ∈Rn×1为RBFNNs 逼近误差,且‖ε‖≤,为逼近误差的上界;为Δf的估计值。
在紧集Ωq ∈Rm×1上,RBFNNs 能够以任意小的精度逼近系统不确定性Δf,即

式中:w* ∈Rn×n为最优权值矩阵,且‖w*‖≤,为w*的上界;ε* ∈Rn×1为最小逼近误差。
高斯基函数的具体形式如下:

式中:ci,σi分别为第i层高斯径向基函数的中心和宽度。RBFNNs 的最优权值矩阵定义为[19]

式中:Mq为状态向量的集合;Ωf为权值参数可行域;则在最优权值矩阵的定义下有

2 干扰观测器设计
针对式(6) 所描述的非线性系统,首先定义D为外界未知有界干扰d和神经网络最小逼近误差ε*的复合值,即有

由假设2 可知d是有界的,又由式(14) 可知ε*也是有界的,所以D也是有界的。根据假设2 可知:‖‖≤,其中为正常数。
借用文献[15]的思想,将干扰观测器设计成如下形式:


对式(17) 两端求导可得

考虑式(16) 可得


将式(21) 代入式(18) 可得

由假设2 可得

考虑式(22) 和(23) 可得

式中:γ>0 为待设计缩放参数;I ∈R3×3为单位矩阵;Q ∈R3×3为待设计参数矩阵。选择合适的Q,使得(2Q-I-γτ2I) 正定。
3 滑模减摆控制器设计
3.1 控制目标
在进行控制器设计前,先给出控制目标和误差信号的定义。
针对平面运动下无人直升机吊装系统,研究存在外界未知有界干扰和建模不确定情况下的减摆控制问题。给定控制目标如下:驱使无人直升机横向(x方向)和竖直方向(z方向)运动到目标点xd,zd,且负载摆角θ收敛到0,其中xd,zd是给定常值[23-24]。
为方便后续控制器的设计,定义如下的误差信号:

对式(25) 两端分别求一阶、二阶导数可得

3.2 滑模减摆控制器设计
针对式(6) 所描述的无人直升机吊装系统及本文的控制目标,设计滑模面[24]为

式中:a,b均为待设计的适当维正定对角矩阵,且b的选择需要满足bg(q)存在Moore-Penrose伪逆。
式(27) 的一阶求导形式为

将式(6) 和(26) 代入式(28) 得

采用等速趋近律来逼近滑模面[25],其具体形式如下:

式中:ρ>0 为待设计参数;sgn(s)=[sgn(s1) sgn(s2) sgn(s3)]T为符号函数向量。sgn(si) 为符号函数,si为向量s的第i项,i=1,2,3。设计闭环系统的控制律u为

式中:P=(bg(q))-1,k>0 为待设计参数。
为消除控制器中因为引入符号函数而产生的抖振,下面采用对称型Sigmoid 函数向量[25]替代控制器中的符号函数向量。
取对称型Sigmoid 函数向量为

式中:β>0 为待设计参数,则修改后的控制律u*为

由于ϖ(s) 函数与sgn(s) 函数都是有界的,因此两者的差值也是有界的,且满足

将式(33) 代入式(29) 并考虑式(20) 和(34) 可得

3.3 稳定性分析
由第1 节无人直升机吊装系统模型、3.1 节控制目标和3.2 节滑模减摆控制器设计,可以给出如下定理。
定理1针对式(6) 所描述的无人直升机吊装系统,在存在外界未知有界干扰和建模不确定的情况下,利用RBFNNs 模型式(11),设计非线性干扰观测器(16) 和滑模控制器(33),能够使得闭环系统最终一致有界。
证明构造系统闭环Lyapunov 函数为

式中:Γ为待设计的对称正定矩阵。
对式(36) 两端求一阶导数可得

考虑到

将式(35) 和(38) 代入式(37) 可得
考虑式(24),则式(39) 可变换为
取神经网络权值自适应律为

式中:α>0 为待设计参数。
由式(10) 和(41) 可推出

根据神经网络权值估计误差的定义有

将式(43) 代入式(42) 可得
式中:λ=min{2(k-1),(α-γ-1‖Q‖2),eig(2Q-(1+γτ2+‖b‖2)I)}>0,eig(·) 表示矩阵的特征值;
由式(44) 及引理1 可知,针对无人直升机吊装系统式(6) 设计的滑模控制器式(33),能够使得闭环系统所有信号一致有界,对式(44) 两边积分得

分析式(45) 可以得出如下结论:系统信号s、~D和~w是有界的,进一步还可以得到

由式(46) 可知,当t →∞时,信号s满足类似地可以推出信号、w~ 均在界内,因此定理1 得到证明。
4 仿真结果与分析
接下来仿真验证系统存在外界未知有界干扰和系统不确定情况下,所设计干扰观测器式(16) 和滑模控制器式(33) 能否达到给定的控制目标。
系统仿真参数如下:无人直升机质量Mh=1 000 kg,吊挂负载质量ml=100 kg,吊索长度l=10 m,重力加速度g=9.8 m/s2,根据参考文献[6],取bl=0.01,bh=0.02。
设定无人直升机吊挂飞行系统的初始值和目标值为:
x(0)=0 m,z(0)=2 m,θ(0)=0°,xd=1 000 m,zd=100 m,θd=0°
在仿真分析中,定义无人直升机吊装系统状态到达目标值并保持在规定误差带(±5%)内,即认为该状态进入稳态;并且定义该状态进入稳态的最短时间为其调节时间。
经过充分调试选取相关参数如下:
α=600,β=10,ρ=10,k=5,γ=1,a=diag{0.07 0.1 115},
b=diag{1.5 2 15},Q=diag{20 20 20},Γ=0.000 28I
取外界未知有界干扰和建模不确定如下:di(t)=sint,Δfi=sinθcosθ,i=1,2,3。
运行仿真曲线如图2和3所示:
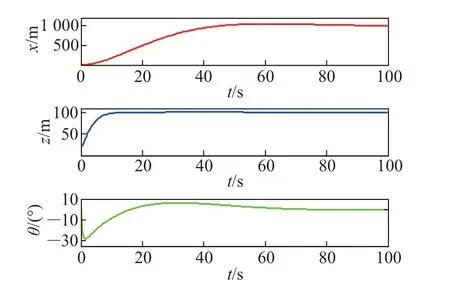
图2 无人直升机位置及负载摆角曲线Figure 2 Curves of unmanned helicopter position and load swing angle

图3 无人直升机位置及负载摆角误差曲线Figure 3 Curves of unmanned helicopter position error and load swing angle error
从图2和3 中可看出,无人直升机在x和z方向上快速逼近目标点,图中x方向约在40 s 处进入稳态;z方向初始高度为20 m,约在10 s 处进入稳态;吊挂负载在控制器刚开始作用下达到一个最大摆角,约为30°,之后负载摆角快速衰减且在18 s 左右就处于小角度(±5°) 振荡,最终约在40 s 处于稳态。仿真表明了所设计的滑模减摆控制器式(33) 能够使得吊装系统到达目标位置且实现负载的振荡抑制。
从图4和5 可以看出,所设计的非线性干扰观测器式(16) 能够跟踪上给定的干扰值。在0~20 s 内,因为所设计的神经网络权值还在调整中,所以逼近误差ε比较大,干扰观测器逼近效果不太理想;在20 s 之后干扰观测器基本跟踪上了给定的干扰信号,进一步说明了所设计的RBFNNs 是有效的。由图5可知,干扰观测器在稳定跟踪后,观测误差保持在6% 之内,体现了该干扰观测器的有效性。
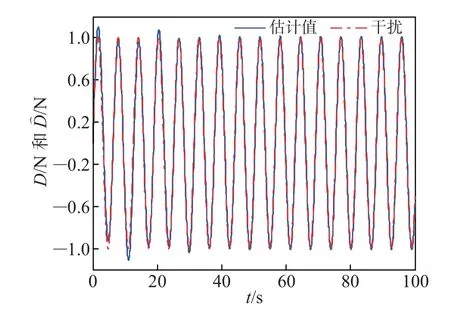
图4 干扰观测器曲线Figure 4 Curves of disturbance observer
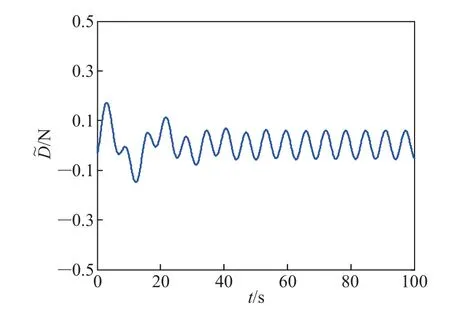
图5 干扰观测器估计误差曲线Figure 5 Curve of disturbance observer tracking error
图6和7 给出了平面运动下无人直升机吊装系统的两个欠驱动控制量变化曲线,两图中ux在摆角振荡以后控制量趋于0,而uz在稳定后为一个定值,这是由于系统在竖直方向还有重力需要平衡。对比图6与7 可知,符号函数作用下的系统控制量会出现抖振情况,会影响系统稳定性和控制器性能,而使用对称型S 函数可以避免这个问题。
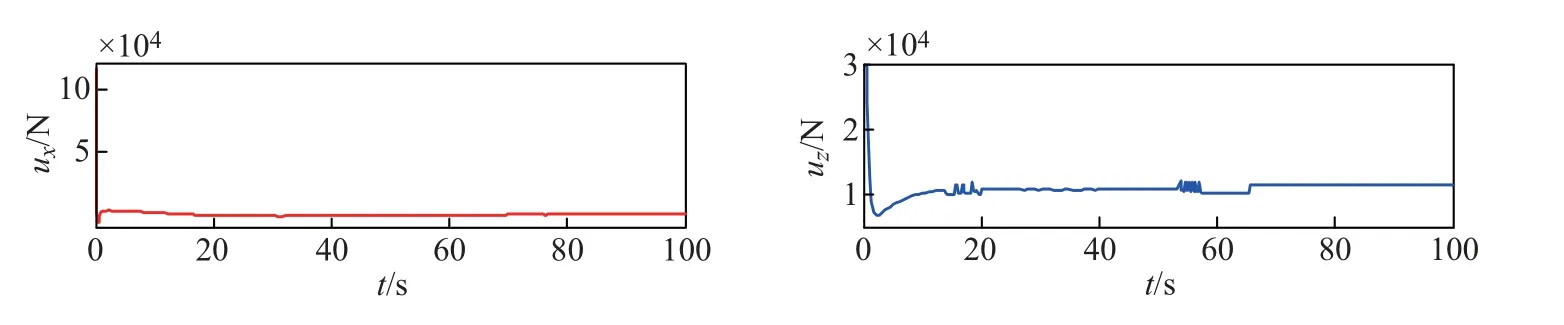
图6 符号函数作用下的控制输入曲线Figure 6 Curves of control input under the action of sign function
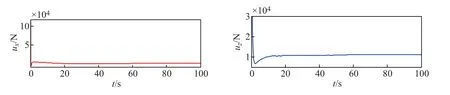
图7 S 函数作用下的控制输入曲线Figure 7 Curves of control input under the action of S-function
为充分验证所设计的控制器的鲁棒性,本文针对无人直升机吊装系统主要参数摄动进行150 次蒙特卡罗仿真[26],选取系统主要摄动参数为无人直升机质量Mh,吊装负载质量ml和吊索长度l,摄动范围为±15%。结果如图8~11所示。
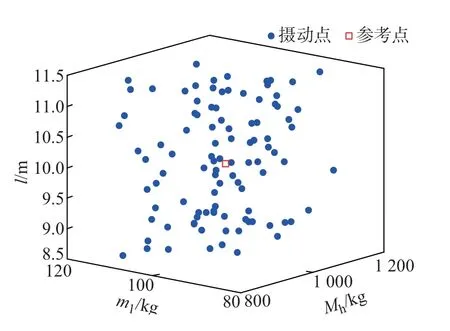
图8 对象参数摄动点分布图Figure 8 Distribution map of object parameter perturbation points
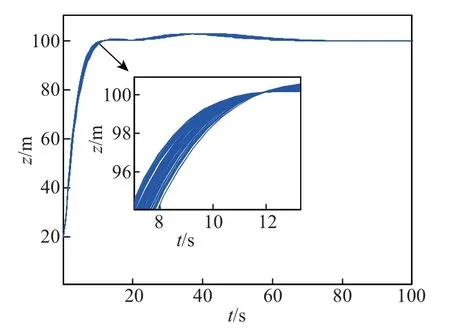
图10 参数摄动下无人直升机z 方向曲线簇Figure 10 Curve cluster in z direction of unmanned helicopter under parameter perturbation

图11 参数摄动下负载摆角曲线簇Figure 11 Curve cluster of load swing angle under parameter perturbation
图8给出了系统主要参数摄动点分布图,对每一个摄动点进行仿真得到图9~11所示的曲线簇。定性分析可知,当不改变系统控制器参数时,在所设计的滑模减摆控制器作用下系统仍能够满足预期的控制目标。进一步定量分析,结果如表1所示。
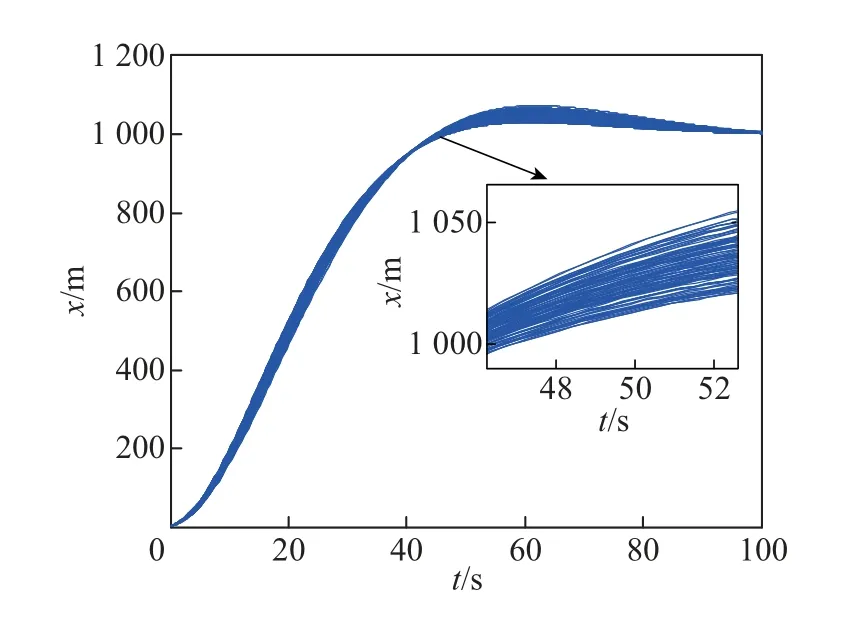
图9 参数摄动下无人直升机x 方向曲线簇Figure 9 Curve cluster in x direction of unmanned helicopter under parameter perturbation
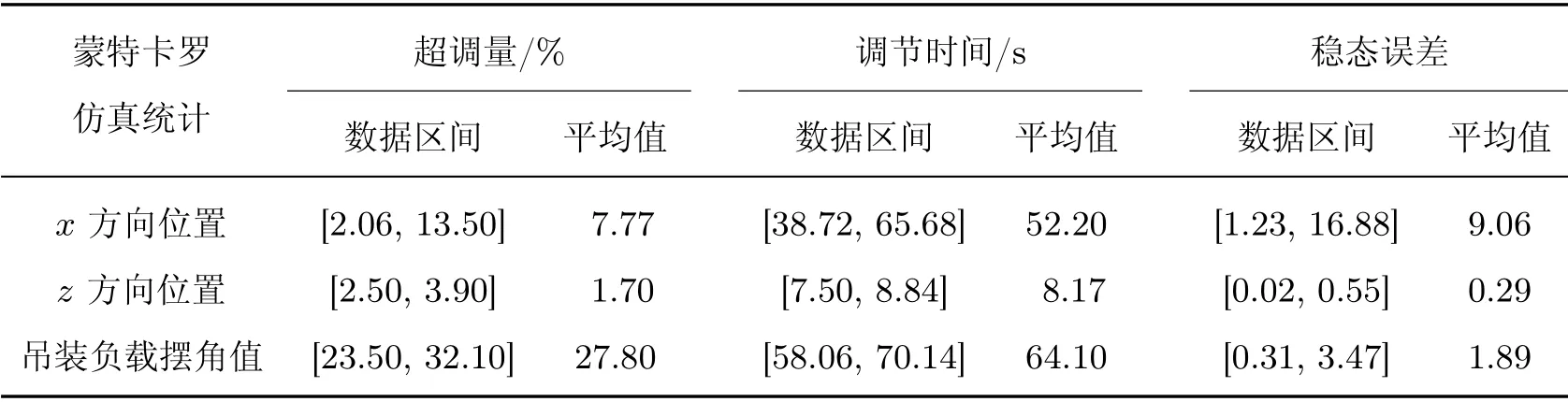
表1 蒙特卡罗仿真统计表Table 1 Table of Monte Carlo simulation statistics
从表1可看出,在系统参数±15% 摄动的影响下,无人直升机吊装系统性能指标均受到一定影响。其中无人直升机x方向位置的调节时间、超调量以及吊装负载摆角的超调量影响较大,z方向性能指标受影响较小。就系统稳态误差而言,参数摄动对x方向影响较大,对剩余两个通道影响较小。分析150 次蒙特卡罗仿真统计结果可得:对象主要参数的摄动会对系统性能有一定影响,但系统依然稳定且能够达到预期控制目标。统计结果验证了本文所提的神经网络滑模减摆控制器的鲁棒性。
5 结 语
本文考虑了平面运动下无人直升机吊装系统存在不确定性和外界未知有界干扰,设计了基于RBFNNs 和干扰观测器的滑模减摆控制器。理论分析和仿真验证所设计的减摆控制器的有效性,并且通过蒙特卡罗仿真检验了所设计控制器的鲁棒性。后续工作将考虑无人直升机吊装系统的三维动态特性及设计非线性控制器,达到吊装系统的鲁棒减摆目的。
猜你喜欢
环球时报(2022-09-15)2022-09-15
小猕猴学习画刊(2022年12期)2022-02-06
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
海峡姐妹(2015年3期)2015-02-27
电测与仪表(2014年11期)2014-04-04
