
体操吊环动作的肌电和LifeMOD仿真研究
2022-01-20 14:28:10钱竞光
吉林体育学院学报 2021年6期
苏 阳 钱竞光
(1.南京体育学院 党政办,江苏 南京 210014;2.南京体育学院 运动健康学院,江苏 南京 210014)
吊环是男子体操项目之一,动、静结合是该项目的显著特点,采用缓慢的肌肉发力方式,完成静力性动作之间转换,形成“慢用力”动作组合,能够体现“力”与“美”的高度统一,也代表着该项目技术发展的趋势[1]。为了加深对慢用力动作技术和基本规律的理解,解决专项力量训练的问题,提高体操科学训练水平,本文对吊环十字支撑再压上成水平十字支撑这组慢用力动作的技术规律、肌肉发力顺序,肌肉发力特点及协调性进行了研究[2]。
随着计算机技术的不断更新和多刚体动力学的发展,运用多刚体动力学模拟仿真技术在现代体育中的研究越来越多。通过多刚体动力学模拟仿真,可以模拟人体实验的整个运动过程,再通过仿真软件分析,可以测量运动过程中各肌肉的用力情况,可以实现无创测量肌肉肌力的目的。因此,近些年来一些研究学者们常使用LifeMOD、Opensim等人体生物力学模拟仿真分析软件进行运动过程中人体肌肉肌力变化分析,以及人机耦合关系等动力学仿真研究[3]。本研究将动力学模拟仿真的方法运用到竞技体操吊环慢用力动作分析和训练尝试,运用LifeMOD多体系统动力学仿真软件对江苏省健将级一线运动员尤浩的技术动作,探索性地建立十字支撑压上成水平十字支撑动作的动力学模型,并结合三维影像解析数据、肌电数据进行对比分析。较以往单纯从运动学方面对技术动作分析、研究和诊断,采用多体动力学计算机模拟方法,获得相应的动力学数,同时结合三维影像解析及表面肌电(SEMG)的数据进行动作技术分析,使实验结果更加准确,更深入地探究技术动作的规律。
1 研究对象
本研究以江苏省体操队优秀运动员尤浩为被试,对体操吊环慢用力动作进行动力与模拟仿真分析,被试的基本情况见表1。

表1 受试者基本情况
2 研究方法
2.1 三维影像解析法
使用英国产的VICON红外三维运动捕捉系统,对实验对象所做的动作进行数据采集。VICON红外三维运动捕捉系统主要由传感器、信号捕捉设备、数据传输设备、数据处理设备组成。该系统根据统一采样时刻不同摄像机对在扫描空间内运动的反光球的像进行运算,得出反光球该时刻在空间的三维坐标。
动作捕捉过程中,要求实验对象按照比赛时的要求去完成。在吊环周围使用6个VICON红外摄像头从不同角度和高度对整个动作进行捕捉。根据LifeMOD软件的要求在人体上贴上35个marker点[3],VICON红外摄像采样频率为100HZ,每帧采集人体的35个标记点,如图1所示。

(a) (b) (c) (d) 图1 VICON系统捕捉十字支撑压上成水平十字支撑动作过程注:a为准备动作;b为十字支撑动作;c为压上动作;d为水平十字支撑动作
根据LifeMOD软件的要求在人体上贴上35个marker点,具体的35个点的贴放位置(如图2所示)。35个点的顺序分别是01LFHD前额左侧、02RFHD前额右侧、03LBHD后脑左侧、04RBHD后脑右侧、05BU.Trunk第7颈椎棘突突起、06BL.Trunk第10胸椎棘突突起、07FU.Trunk胸骨柄、08FL.Trunk剑突、09Offset右肩胛骨、10L.Shoulder左肩、11L.Elbow左肘、12L.Wrist Upper左侧腕关节桡侧、13L.Wrist Down左侧腕关节尺侧、14L.Hand左手背面二掌骨近侧端、15R. Shoulder右肩、16R.Elbow右肘、17R.Wrist Upper右侧腕关节桡侧、18R.Wrist Down右侧腕关节尺侧、19R.Hand右手背面二掌骨近侧端、20L.ASIS左髂前上棘、21R.ASIS右髂前上棘、22L.Sacral左髂后上棘、23R.Sacral右髂后上棘、24L.Thigh左股骨外侧、25L.Knee左膝外侧髁、26L.Shank左侧胫骨、27L.Ankle左踝外侧髁、28L.Heel左后跟、29L.Toe左第二跖骨、30R.Thigh右股骨外侧、31R.Knee右膝外侧髁、32R.Shank右侧胫骨、33R.Ankle右踝外侧髁、34R.Heel右后跟、35R.Toe右第二跖骨。将VICON红外三维运动捕捉系统采集的35个标记点的运动学数据导出,然后编写如下程序,进行数据转换,输出后缀名为.slf格式的文件[3]。
Private Sub Command1_Click()
Dim i As Integer
Dim xdata(1 To 35) As Single
Dim ydata(1 To 35) As Single
Dim zdata(1 To 35) As Single
Adodc1.ConnectionString = "Provider=Microsoft.Jet.OLEDB.4.0;Data Source=" & App.Path & "data.mdb;Persist Security Info=False"
Adodc1.CommandType = adCmdTable
Open App.Path + "LifeMODdata.slf" For Output As #1
With Adodc1.Recordset
.MoveFirst
Do While Not .EOF '
ind_num = .Fields(1) '
'MsgBox (CStr(ind_num))
For i = 1 To 35 '
xdata(i) = .Fields(i * 3 - 1)ydata(i) = .Fields(i * 3)
zdata(i) = .Fields(i * 3 + 1)
For i = 1 To 35 ' Print #1, CStr(ind_num) & vbTab & CStr(i) & vbTab & CStr(xdata(i)) & vbTab & CStr(zdata(i)) & vbTab & CStr(ydata(i)) & vbTab & "0" & vbTab & "0" & vbTab & "0"
Next
.MoveNext
Loop
End With
End Sub

(a) (b) (c)图2 VICON红外三维影像捕捉时在人体上贴的标记点注:a:LifeMOD软件默认的Marker点位置;b:VICON红外三维影像捕捉时在人体上贴的标记点正面;c:VICON红外三维影像捕捉时在人体上贴的标记点反面
2.2 表面肌电法
2.2.1 表面肌电数据采集
选取受试对象的三角肌前束(FD)、三角肌中束(MD)、三角肌后束(PD)、肱二头肌长头(BB)、肱三头肌长头(TB)、胸大肌(PM)、背阔肌(LD)、前锯肌(SA)、冈上肌(S)、冈下肌(I)、斜方肌下部(TI)为测试肌肉。根据测试动作要求及BTS肌电采集软件中给定的电极贴放位置对所选的肌肉贴上电极,沿肌纤维的走向在肌肉肌腹的隆起处贴好电极,两电极中心距离2cm。具体位置如图3所示。

图3 实际采集肌电信号时电极片贴放位置示意图
粘贴电极之前用剃须刀剃除皮肤表面的汗毛,然后用酒精棉球擦去要测试肌肉表面的油脂和碎屑以降低测量时候由皮肤碎屑引起的高阻抗[4]。在进行测试之前,受试者要根据吊环技术动作的特点进行充分的准备活动,以免在运动过程中出现运动损伤。按照实验设计方案,进行表面肌电采集,采集频率设置为1000Hz[5]。
2.2.2 表面肌电数据处理
应用BTS表面肌电测试系统配套的Myolab软件对原始的肌电信号进行处理,即整流、高通滤波、低通滤波、积分,完成原始肌电信号的平滑和积分处理。具体处理过程如下:
1)将BTS表面肌电仪测试的肌电数据导入Myolab软件。
2)对肌电数据在20-400HZ进行滤波处理。
3)对原始肌电进行积分处理。
4)以200ms为时间节点,计算均方根振幅(RMS)。


2.3 人体多刚体动力学建模法
2.3.1 建立人体骨骼模型
根据美国空军空间医学研究实验室和Dayton大学研究组织共同开发的GeBod数据库,在此数据库的基础上,导入运动员的身体形态参数,如性别、身高、体重、年龄等,以针对研究对象建立人体全身的骨骼模型[6]。
2.3.2 建立关节连接
LifeMOD软件中关节的自由度上的功能可以由用户自定义。包括固定、自由、受控、弹簧,阻尼以及力矩驱动等类型。在其自带的关节模型中,把关节定义为弹簧-阻尼单元,可以在有一定范围内设置其刚度、阻尼系数、角度等参数。在人体骨骼模型建立的基础上,通过设置各关节的参数,再进行关节的建立。同时各关节点自由度的方程也建立起来了。得到人体关节模型如图4所示,其中骨骼间相连的圆形部位即为关节。
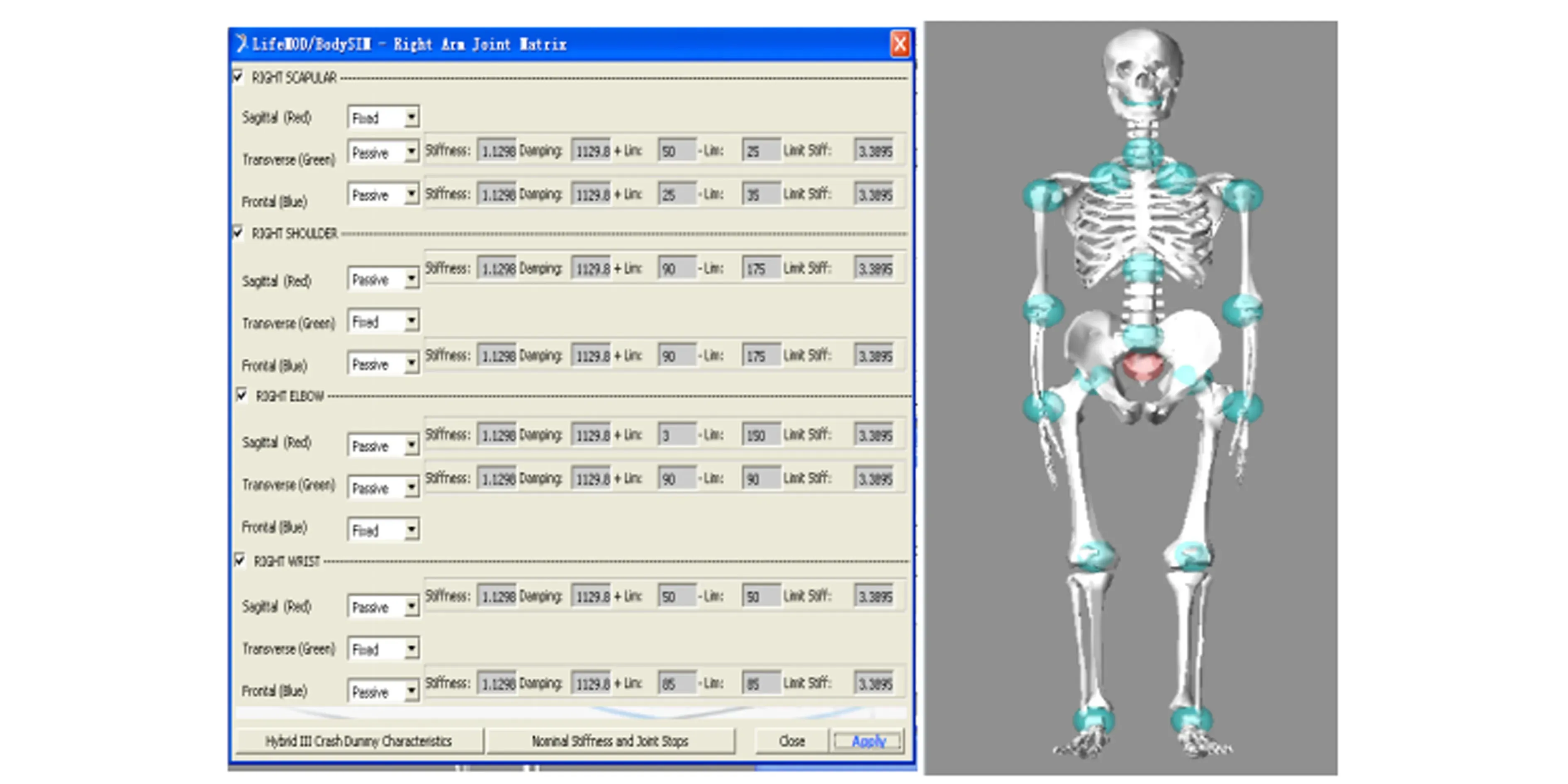
图4 人体关节参数在LifeMOD软件中的显示(左)、人体关节模型(右)
2.3.3 建立肌肉模型
对肌肉的定义:在LifeMOD中提供了完整的肌肉特性参数库,包括肌肉生理横截面积(pCSA)、最大组织应力和肌肉模型等。主动肌肉力表达式如下:
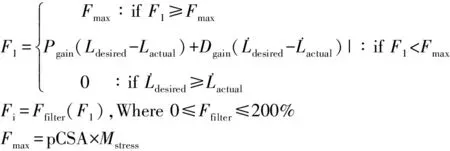
式中:pCSA一肌肉生理横截面积;—最大组织应力;—逆向动力学计算中肌肉的伸缩模式;—肌肉模型模式;—二者的求导。初始pCSA可以通过假设模型的身高、体重、年龄以及性别从LifeMOD的数据库中进行选取。并确定比例因子和微分因子[7]。
LifeMOD软件提供的软组织模型主要是韧带和肌肉,如图5所示。其中韧带是被动的弹簧阻尼器,肌肉具有反向动力学中起到“学习元”,也就是可以训练的元素;在正向动力学中起到主动性的元素。在反向动力学仿真时,在数据的驱动下记录肌肉的变化,包括长度的伸长缩短等数列,然后在正向动力学仿真时作为伺服系统重复这些数列,达到“主动收缩”的效果。LifeMOD软件将人体肌肉组织简化成118个肌群,添加在骨骼上的解剖学标记点上(如图6所示)。可以根据实际需要调整肌肉的起止点和阻尼[8]。

图5 韧带模型(左)肌肉模型(右)

图6 人体形态参数在LifeMOD软件中的显示(左)、人体肌肉模型(右)
2.3.4 添加运动副
建成立人体模型,但这个模型是被动的,LifeMOD所标记的点需要实际采集的运动学数据去驱动。将VICON红外三维捕捉系统采集的运动学数据加载到模型上,让模型上的标记点按照实际的运动轨迹运动(如图7所示)。
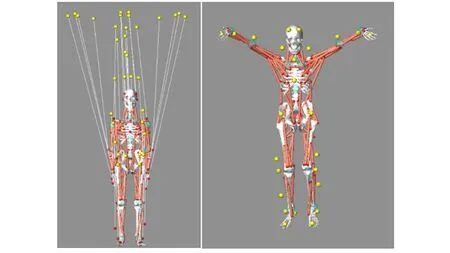
图7 添加运动副(左);平衡分析以及同步之后的结果(右)
2.3.5 运行平衡分析
让模型上的规定点去追赶实际的运动学数据,使模型尽可能与运动副重合,从而将人体模型按照运动副的轨迹运动,平衡分析后模型。
2.3.6 建立接触
由于各方面的原因,本次实验没能建立运动器械吊环的模型,将人与吊环的接触简化为人与平面的接触。建立接触过程如下:打开命令窗口,输入命令:marker cre marker=.World.ground.flr loc=0.0,4085.0,0.0 ori=0.0,-90.0,0.0 rel=.World。建立接触平面,将平面模型与人体模型模型的手掌耦合一起,设置该点为支点,建立接触[9]。
2.3.7 反向动力学仿真
建立好接触后,对模型施加一个向下的重力加速度。驱使模型进行反向动力学仿真,精确的测量出运动过程中各关节点或重心的位置、速度、加速度、关节角度、角速度以及角加速度等运动学数据。在整个分析过程中,关节的软组织计入下整个运动过程,为正向动力学仿真做准备[10]。
2.3.8 正向动力学仿真
把仿真数据输入模型进行正向动力学模拟计算,建立吊环压“十字”再压上成水平“十字”动作动力学模型(如图8所示)。根据正向动力学仿真分析,得出所要测的参数,如关节力、肌肉力等。并对所得参数进行分析。
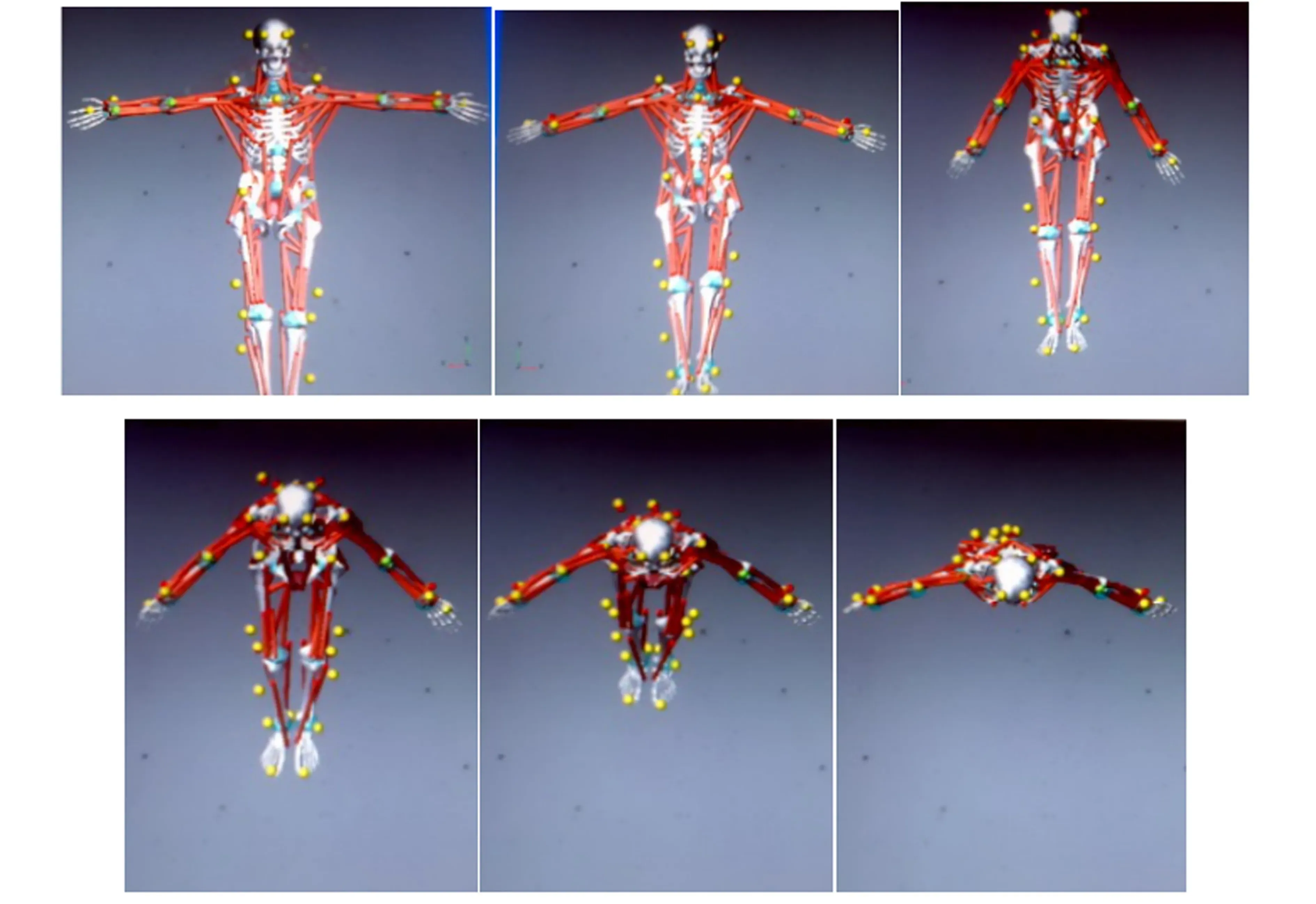
图8 吊环“十字”再压上成水平“十字”动作动力学模型
3 研究结果与分析
3.1 动作过程的运动学分析
3.1.1 十字支撑过程的运动学分析
通过图9我们可以看出,在下压成十字支撑过程中左、右侧肩关节角度逐渐增大,从0°增加到85.8°。下压过程中,上臂的角速度变化是先增大后减小的过程。如图10所示,肩关节角速度的变化趋势为先增大后减小。说明下压过程是一个先快后慢的过程。

图9 肩关节角度变化 图10 肩关节角速度变化
通过图11可以看出在完成十字支撑动作过程中, 躯干和下肢在X轴方向基本不变,在Z轴方向,通过曲线可以看出,躯干向后摆动,但脚尖的位置保持不变,说明在下压的过程中有一个屈髋的动作。在下压到一定程度之后,脚尖加速向后摆动,最后与躯干保持垂直位。在下压过程中的屈髋动作,可以提高重心位置,其目的是保证在下压开始阶段重心下降的速度,保证肩关节的稳定性。
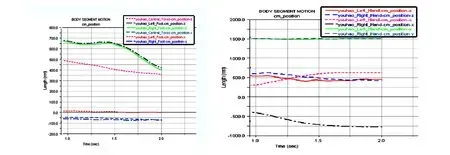
图11 下压成十字支撑过程躯干和脚在X轴和Z轴的运动轨迹(左) 图12 下压成十字支撑过程中手(右)
通过图12可以看出,在下压成十字支撑过程中,吊环支撑点的运动不只是在X轴与Y轴构成的垂直面上运动,而是一个三维的摆动动作。在Z轴方向,双手有一个向后摆的过程。这可能是由于在下压过程中,下肢有一个的屈髋动作使得人体的重心向前移动,为了保证整个人体的平衡,双手支撑的吊环要向后摆动。
3.1.2 压上成水平十字支撑过程的运动学分析
把压上过程分为3个阶段,第一个阶段是上臂内收屈髋阶段,第二阶段是下摆阶段,第三阶段是后摆压上阶段。
通过图13可以看出,在压上过程开始时,脚在Z轴上的位移增大,而躯干与手在Z轴上的位移减小。说明在压上过程开始时,上肢在内收的同时有一个后摆的趋势和收腹屈髋过程,但后摆的幅度很小。上肢在内收的同时屈髋,使得人体的重心向前上方移动,减小上肢做功。屈髋到一定程度后开始伸髋,借助伸髋下摆的重力势能向后压上成水平十字支撑动作。借助于重力势能,减小了压上的难度。
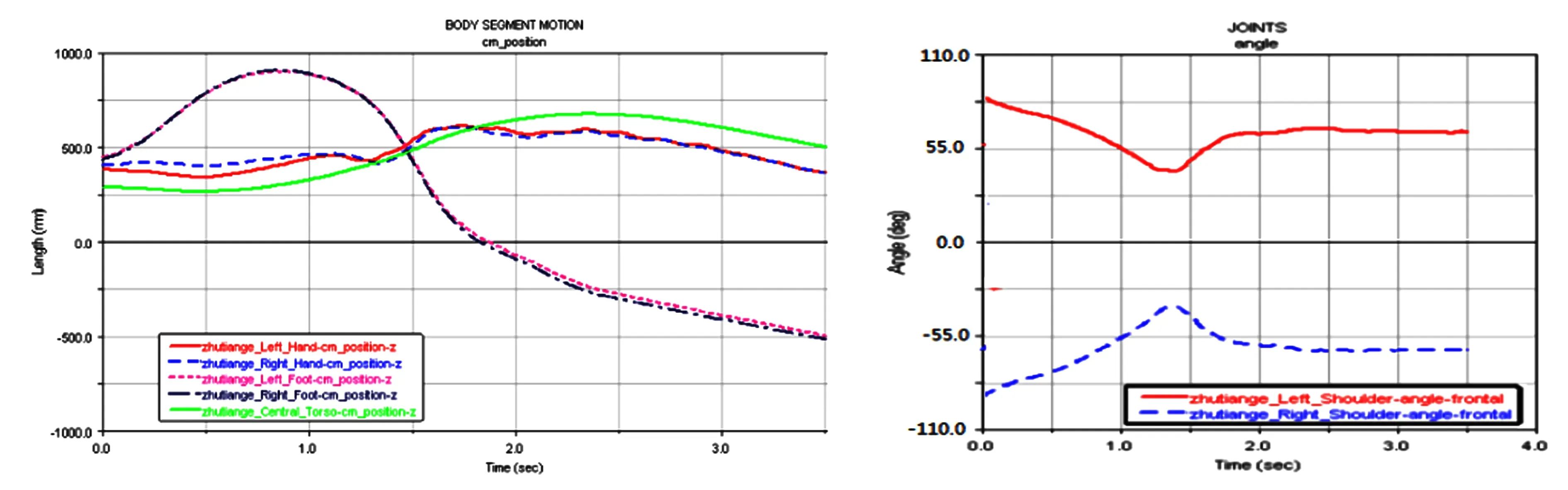
图13 压上成水平十字支撑过程躯干、手、脚的运动轨迹(左) 图14 压上成水平十字支撑过程左右肩角在矢状面的变化趋势(右)
通过图14可以看出,在整个压上过程中肩关节角度先减小后增大,从0S开始至1.35S时,肩关节角度由原先的85.8°减小到39.4°,减小了46.4°,从1.35S至2.22S,肩关节角度又开始增大,从39.4°增加到62.5°。2.22S之后肩关节角度基本保持不变。
3.2 动作过程的肌电分析
把吊环十字支撑压上成水平十字动作划分为三个阶段,第一阶段是十字支撑阶段,定为T1;第二阶段是压上阶段,定为T2;第三阶段是水平十字支撑阶段,定为T3。
积分肌电(iEMG)是指在一定时间内肌肉中参与活动的运动单位放电的总量。在时间不变的前提下,其值的大小在一定程度上反映了参加工作的运动单位的多少和每个运动单位的放电大小[4]。
由图15可见,十字支撑再压上成水平十字支撑过程中, 肌肉的发力顺序依次为:肱三头肌、肱二头肌、背阔肌、胸大肌、斜方肌下部、冈下肌、前锯肌、三角肌前束、中束、后束、冈上肌;其中肱二头肌和肱三头肌在第一阶段兴奋性强,在第二、第三阶段有所减弱,但依然维持兴奋;胸大肌在整个动作过程中都保持高度兴奋;背阔肌在第一阶段和第二阶段的前半段保持兴奋且兴奋性强,在第二阶段后半段和第三阶段明显减弱;三角肌前束、中束、后束,斜方肌下部、冈下肌、前锯肌主要在第二阶段和第三阶段保持兴奋;冈上肌在全过程中的兴奋性都不是很明显。
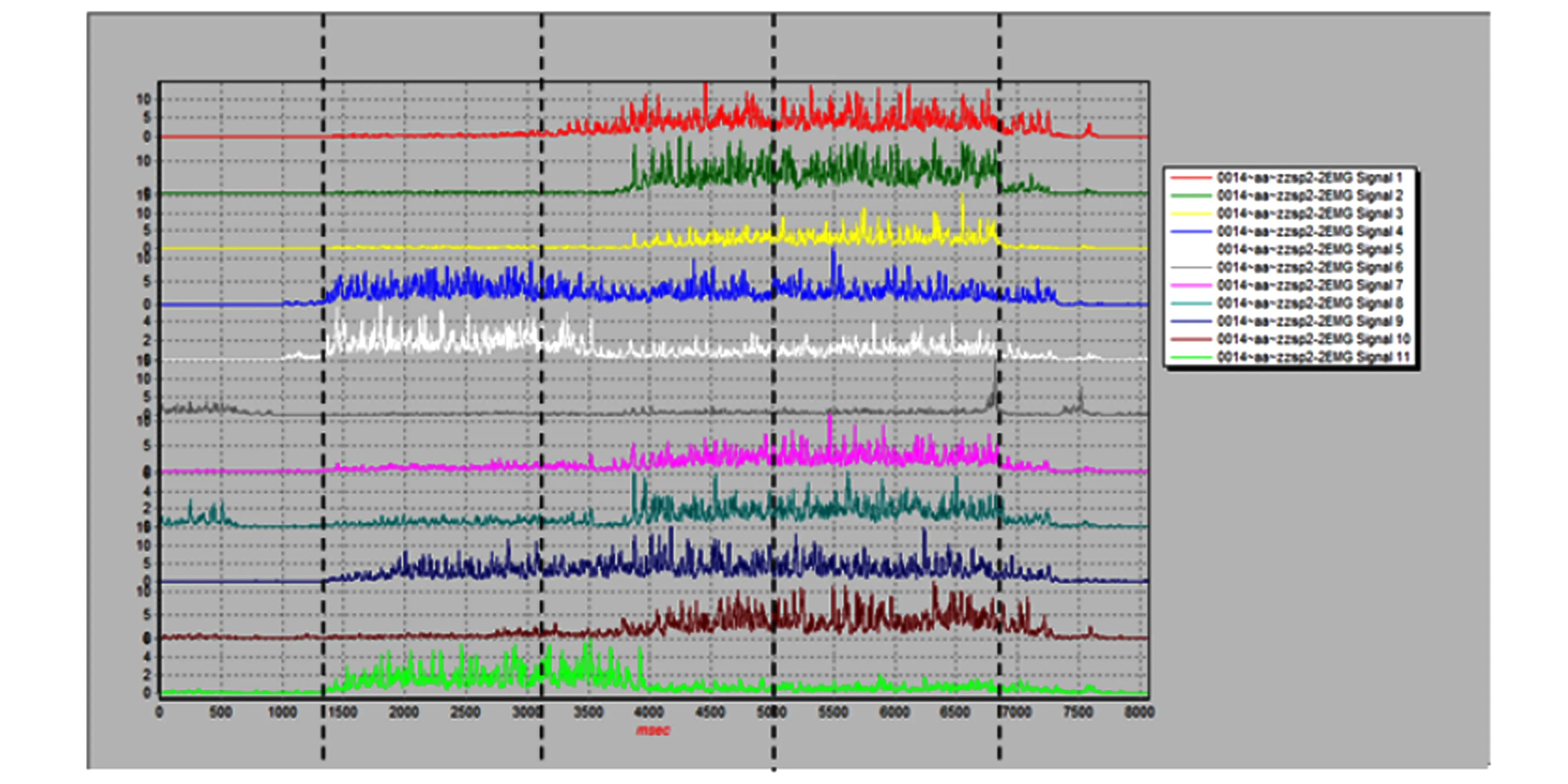
图15 运动健将尤浩的积分肌电图(mV)注:从上至下依次为三角肌前束-FD、三角肌中束-MD、三角肌后束-PD、肱二头肌长头-BB(L)、肱三头肌长头-TB(L)、冈上肌-S、冈下肌-I、斜方肌下部-TI、胸大肌-PM、前锯肌-SA、背阔肌-LD的积分肌电图。T1阶段-十字支撑阶段、T2阶段-压上阶段、T3阶段-水平十字支撑阶段。
肌肉肌电活动的贡献率,即各块肌肉的积分肌电值占所测11块肌肉的积分肌电总和的百分比。表2为研究对象在吊环十字支撑压上成水平十字动作中各肌肉肌电活动的贡献率。

表2 动作的三个阶段所测肌肉肌电活动的贡献率(%)
由表2可知,在十字支撑阶段(T1阶段),肱二头肌、肱三头肌、胸大肌、背阔肌的贡献率较大,占了78.4%。其中肱二头肌和胸大肌的贡献率最大,分别为27.6%和21.6%。说明在十字支撑阶段上臂的主要内收肌群发挥主要作用;在压上阶段(T2阶段),三角肌前、中、后束的贡献率较大,分别为13.5%、18.6%、8.5%。肱二头肌、冈下肌、胸大肌、前锯肌的贡献率也较大,其中胸大肌的贡献率最大为15.8%。相比于T1阶段,肱二头肌、肱三头肌的贡献率明显减小,背阔肌在压上阶段的前半段和后半段的贡献率相差很明显,前半段明显大于后半段。这是因为在压上阶段的前半段主要是拉躯干向上的动作,背阔肌的作用大,而后半段,主要是躯干后摆动作,背阔肌作用减小。三角肌、冈下肌、前锯肌的贡献率明显增加,说明在压上阶段,三角肌、肱二头肌、冈下肌、胸大肌、前锯肌为主要发力肌群;在水平十字支撑阶段(T3阶段),肌肉的贡献率与T2阶段的基本相同。说明在压上过程与支撑过程所参与的肌群基本相同。
3.3 动作过程的动力学分析
利用LIFEMOD进行十字支撑压上成水平十字支撑动作动力学仿真模拟,通过逆向动力学仿真和正向动力学仿真后,得到人体在动作过程中所受的关节力和肌肉力。根据吊环动作的特点是双侧上肢做对称的克服重力运动,因此只选用身体右侧为研究对象,进行数据分析。
由于运动器械吊环的模型没能精确建立,而是使用人与平面接触代替与人与运动器械的接触。这是因为在整个动作过程中吊环的运动轨迹接近于钟摆的形态,而且在垂直面上变化较小,因此使用平面接触代替器械模型接触对整个模型的建立的影响不会很大,虽然在肌肉力的结果不是很精确,但能反映整个动作中个肌肉的肌肉力变化趋势[11]。
3.3.1 十字支撑过程的动力学分析
图16是尤浩模型仿真十字支撑过程肱二头肌肱三头肌肌张力图,由图可见,肱二头肌和肱三头肌的肌张力变化幅度差异比较大,其中肱二头肌变化比较明显,肱三头肌肌张力比较平稳,肱二头肌的肌张力比肱三头肌大,这与肌电测量数据(表2)肱二头肌在动作T1阶段贡献率27.6,明显高于肱三头肌16.8的结果相一致。
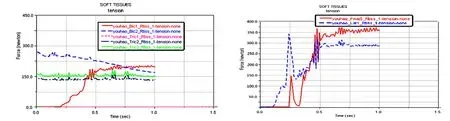
图16 十字支撑过程肱二头肌(Bic)肱三头肌(Tric)肌张力(左) 图17 下压成十字支撑过程胸大肌(Pmaj)和背阔肌(Lat)肌张力(右)
图17是尤浩模型仿真十字支撑过程胸大肌和背阔肌肌张力图,由图可见,在下压成十字支撑的过程中,胸大肌和背阔肌的肌张力逐渐增大。在下压过程的后半段,胸大肌和背阔肌的肌张力基本保持稳定,其中胸大肌的肌张力值为350N,背阔肌的肌张力值为280N。这与肌电测量数据(表2)的胸大肌在动作T1阶段贡献率(21.6)和背阔肌(12.4)结果相吻合。
图18是尤浩模型仿真十字支撑过程三角肌肌张力图,由图可见,在下压过程中,三角肌的肌张力逐渐减小,这与肌电测量数据(表2)的三角肌前束、中束、后束在T1阶段贡献率都比较小分别为(2.7、1.6、2.1)结果一致。

图18 下压成十字支撑过程三角肌(Delt)肌张力(左) 图19 下压成十字支撑过程斜方肌(Trap)肌张力(右)
图19是尤浩模型仿真十字支撑过程斜方肌肌张力图。由图可见,在下压过程中,斜方肌上部肌肉的肌张力比较大,整个过程中肌张力有增大的趋势。肌电测量数据(表2)也表明斜方肌贡献率由3.8增加到5.5。
3.3.2 压上成水平十字支撑过程的动力学分析
图20是尤浩模型仿真压上成水平十字支撑过程三角肌(Delt)肌张力图。其中0-2.0S时间段为压上过程,2.0-3.0S时间段为水平十字支撑过程。由图可见,在压上过程中三角肌的肌张力先逐渐增大,之后又逐渐减小,最后趋于平衡。在整个压上过程中,三角肌中束在压上动作进行了一半时肌张力到达峰值,峰值为95N。在水平十字支撑过程中,三角肌的肌张力基本保持平衡,三角肌中束的肌张力值最高为60N。对比肌电测量数据(表2),其三角肌前束、中束、后束在T2阶段贡献率都达到最大值(13.5、18.6、8.5),并且在T3阶段贡献率都保持在(13.6、17.8、8.9)的高位,特别是三角肌中束在压上动作的T2阶段达到贡献率18.6最大值,模拟结果与肌电数据高度吻合。

图20 压上成水平十字支撑过程三角肌(Delt)肌张力(左) 图21 压上成水平成十字支撑过程斜方肌(Trap)肌张力(右)
图21是尤浩模型仿真压上成水平成十字支撑过程斜方肌(Trap)肌张力图。其中0-2.0S时间段为压上过程,2.0-3.0S时间段为水平十字支撑过程。由图可见,在压上过程中斜方肌的肌张力的变化趋势是一个先增大后减小的过程,最后趋于平衡。在整个压上过程中,三角肌中束在压上动作进行了一半时肌张力到达峰值,峰值为250N。在水平十字支撑过程中,斜方肌的肌张力基本保持平衡,斜方肌上部的肌张力值较斜方肌下部高,其肌张力值约为150N。根据肌电测量数据(表2),斜方肌下部在动作三个阶段的贡献率分别(3.8、5.5、6.8)与模拟结果基本吻合。
4 结论
1)首次建立包含肌肉系统的吊环慢用力动作人体动力学模型,实现对吊环“十字”压上成“水平十字”支撑动作全过程的动力学仿真。把仿真获得整个动作过程中肌肉张力数据和变化趋势与肌肉的表面肌电测量数据与变化趋势进行比较分析,结果两者的具有很高的吻合度,这也验证了该动作的动力学模型的可靠性和实用性。
2)结合动力学模拟与表面肌电分析,结果表明,在下压成水平十字支撑动作过程,胸大肌肌张力峰值居首位,其次是背阔肌、斜方肌上部、肱二头肌、肱三头肌、三角肌;在压上成水平十字支撑动作过程,肱二头肌、胸大肌、三角肌、背阔肌(压上过程的前半段)是主要的发力肌肉和动力来源,这为运动员专项力量训练提供了理论依据。
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22 06:38:47
南通大学学报(医学版)(2021年6期)2021-12-22 02:06:36
船海工程(2018年5期)2018-11-01 09:14:48
环球时报(2017-08-14)2017-08-14 11:36:06
大型铸锻件(2016年4期)2016-08-16 10:31:19
现代电生理学杂志(2016年4期)2016-07-10 12:02:17
中华骨与关节外科杂志(2016年5期)2016-05-17 06:10:58
磁共振成像(2015年6期)2015-12-13 05:44:06
体育科学研究(2015年4期)2015-02-28 17:06:29
河南医学研究(2014年5期)2014-02-27 14:52:47
