
湿地轻型两栖式多功能工作机切割器的运动分析与仿真研究
2022-01-19 05:08王静,宋力,沈辉
机械设计与制造工程 2021年12期
王 静,宋 力,沈 辉
(1.扬州大学广陵学院,江苏 扬州 225000) (2.江苏省水利科学研究院,江苏 扬州 225002) (3.扬州大学机械工程学院,江苏 扬州 225127)
湿地水生植物季节性收割作业量大,采用传统人工方式工作效率低,收割和捕捞速度常常无法跟上水生植物的生长速度,致使大量水生植物在水中腐烂,污染水质[1]。进行机械化收割具有明显的社会效益和经济效益,但当前市场上的机械化收割设备为大型水草收割机,而湿地形状不规则,局部区域操作空间狭窄,限制了大型机械的使用,且湿地使用大型收割设备容易出现机械设备沉陷等问题[2-4]。湿地轻型两栖式多功能工作机的研究开发,较好地解决了这一问题,满足了市场的需求。切割器作为轻型两栖式多功能工作机的关键部件,其性能直接影响切割质量及收割效率。本文对湿地轻型两栖式多功能工作机切割器进行运动学分析与仿真,以为其后期优化提供理论依据。
1 总体结构与工作原理
1.1 系统组成
湿地轻型两栖式多功能工作机由车架、行走底盘、动力单元、连接架、提升架、快换接头和工作装置等组成,其结构如图1所示。提升架的作用是调整工作装置的高度,控制切割高度;连接架起到伸长和减震的作用;快换接头使工作装置的安装和拆卸更加方便,可装配不同的工作装置,满足多功能的需求。工作机除装配T型刀头用来收割水草和湿地植被外,也可装配钻头用于厚冰钻孔,进行冰上抢险救灾。

1—车架;2—行走底盘;3—提升架;4—快换接头;5—连接架;6—工作装置
1.2 往复式切割器工作原理
往复式切割器结构如图2所示,工作原理如图3所示。
2 运动分析
2.1 割刀的运动方程
割刀的运动特性对切割器性能有直接影响。可以将往复式切割器简化为曲柄连杆机构,连杆在曲柄的驱动下做往复直线运动[5],结构如图4所示。

图2 往复式切割器结构图
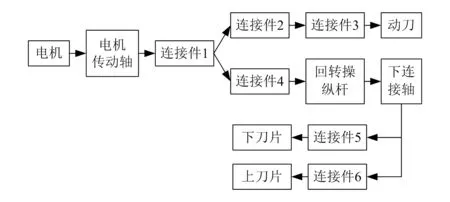
图3 工作原理图

图4 切割器的机构运动简图
建立割刀的运动方程[6]:
x=-rcos(ωt)
(1)
(2)
a=-rω2cos(ωt)
(3)
式中:ω为动刀片的角速度,rad/s;r为曲柄半径,mm;x为割刀位移,mm;Vx为割刀在x方向上的速度,mm/s;t为时间,s;a为加速度,mm/s2。
联立式(1)、式(2)可以得到式(4):
(4)
可以看出,割刀速度与割刀位移的关系满足椭圆方程式,椭圆长半轴的长度为rω,短半轴的长度为r,如图5所示,这说明割刀上任一点的速度都不相同。
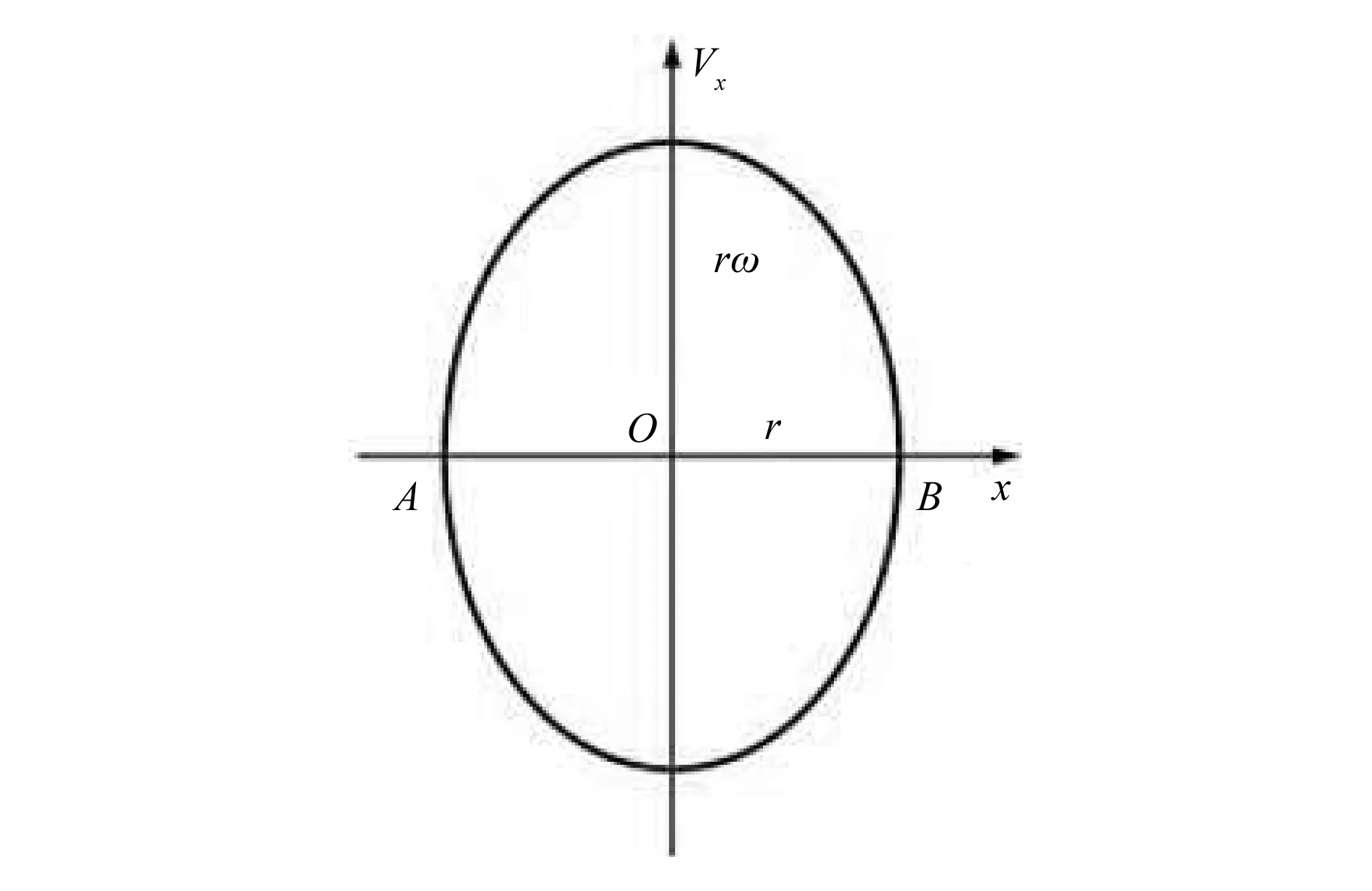
图5 割刀速度与割刀位移关系图
综上可知,割刀上某一点的速度变化规律与椭圆方程式是一致的。当位移为零,即x=0时,该点位于刀片的重心位置,此时Vx取得最大值,即为rω;当位移为r,即x=±r时,该点位于刀片的极左或极右处,此时Vx=0,为最小值。
2.2 多功能工作机的刀机速比分析
刀机速比(λ值)是衡量湿地轻型两栖式多功能工作机设计可行性的重要参数之一,它与以下重要的指标有关:割草质量、割后整齐程度和漏割率,因此必须量化[7]。λ值可通过作图法获得,首先绘制割刀绝对运动的轨迹,然后分析刀具的切割过程,即用切割图确定λ。图6为割刀的切割图。
由图6可以得出:重割区(Ⅱ)和空白区(Ⅲ)的存在会使割刀的切割性能下降。空白区太大将会漏割,而重割区太大会将割过的残茬再次切割,增加功率消耗。往复式切割器割刀的绝对运动轨迹由割刀的平均速度Vp与底盘前进的速度Vm综合确定,用切割进距H表示。H值增大,空白区面积增大,重割区面积减小;H值减小,空白区面积减小,重割区面积增大。H的计算公式为[8]:
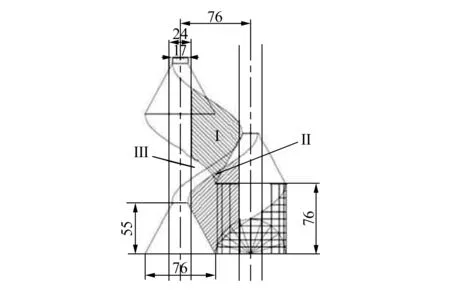
图6 往复式切割器切割图
(5)
(6)
式中:T为割刀运动一个行程的时间,s;n为曲柄转速,r/min;S为割刀运动的一个行程,S=2r,本文取76.2 mm。
割刀的平均速度为:
(7)
将曲柄主轴转速550 r/min代入式(7)可算得割刀的平均速度Vp=1.397 m/s。底盘前进的平均速度Vm=5 km/h=1.389 m/s,将数值代入式(6)可得刀机速比λ值为1。
根据机械行业相关标准,可以得知最佳刀机速比λ值一般为0.8~1.2[9],故本文理论计算得到的切割器λ值满足设计要求。
3 多功能工作机运动学仿真分析
为直观地分析切割器工作过程中刀具的位移、速度和加速度特性,使用ADAMS软件进行运动学仿真分析[10]。切割器的仿真模型如图7所示。利用电动机带动传动轴转动,转速为550 r/min。
由图8可以看出,割刀的位移曲线为正弦曲线,曲线的波峰和波谷值是割刀在两个不同方向上的最大位移。
由图9可以看出,当曲柄以恒定速度旋转时,在连杆的驱动下,割刀的速度变化曲线可以近似为正弦变化。动刀片的最大速度值出现在初始点,动刀片的零速度值在其最大位移处。
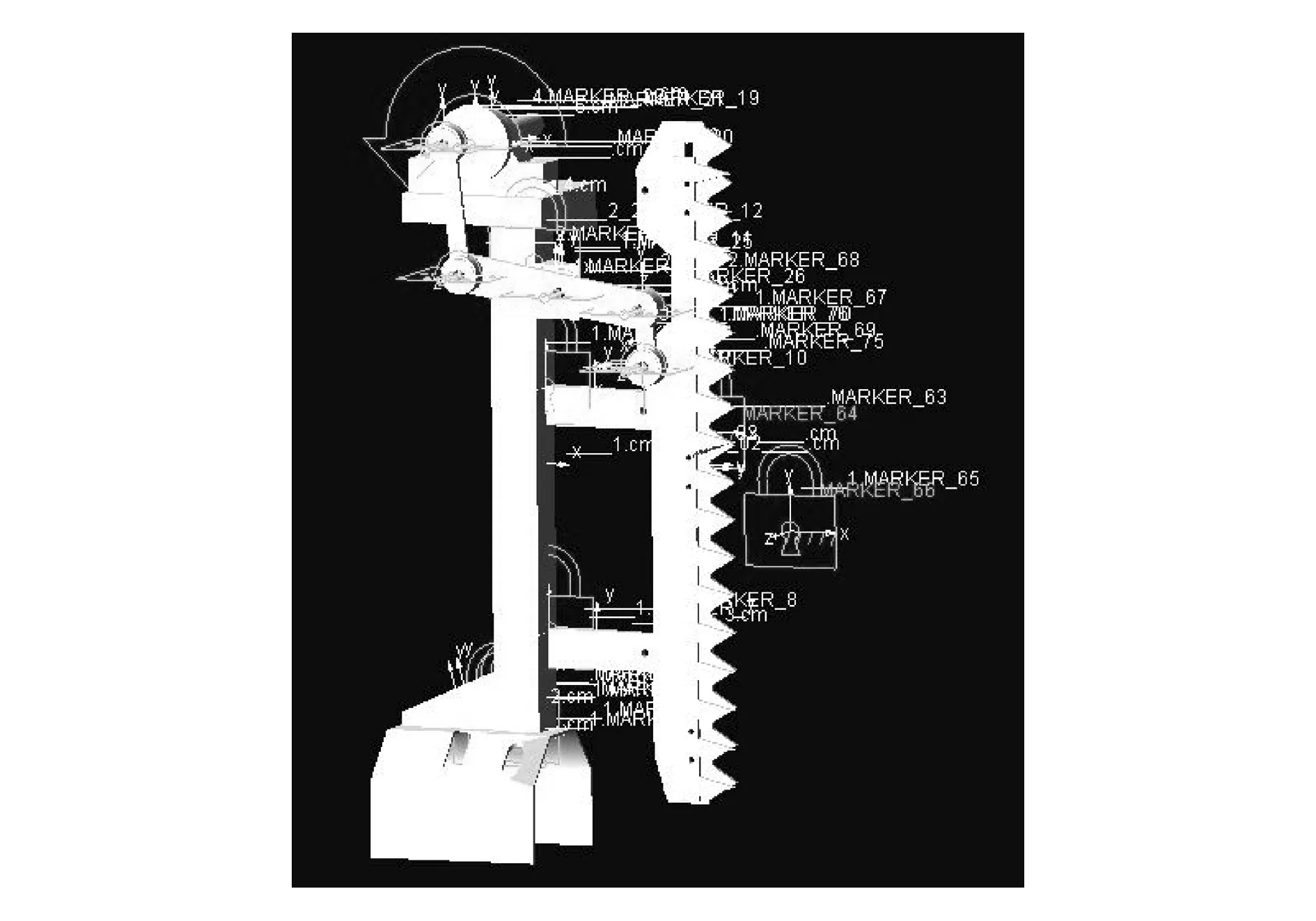
图7 往复式切割器仿真模型

图8 割刀位移随时间变化曲线图
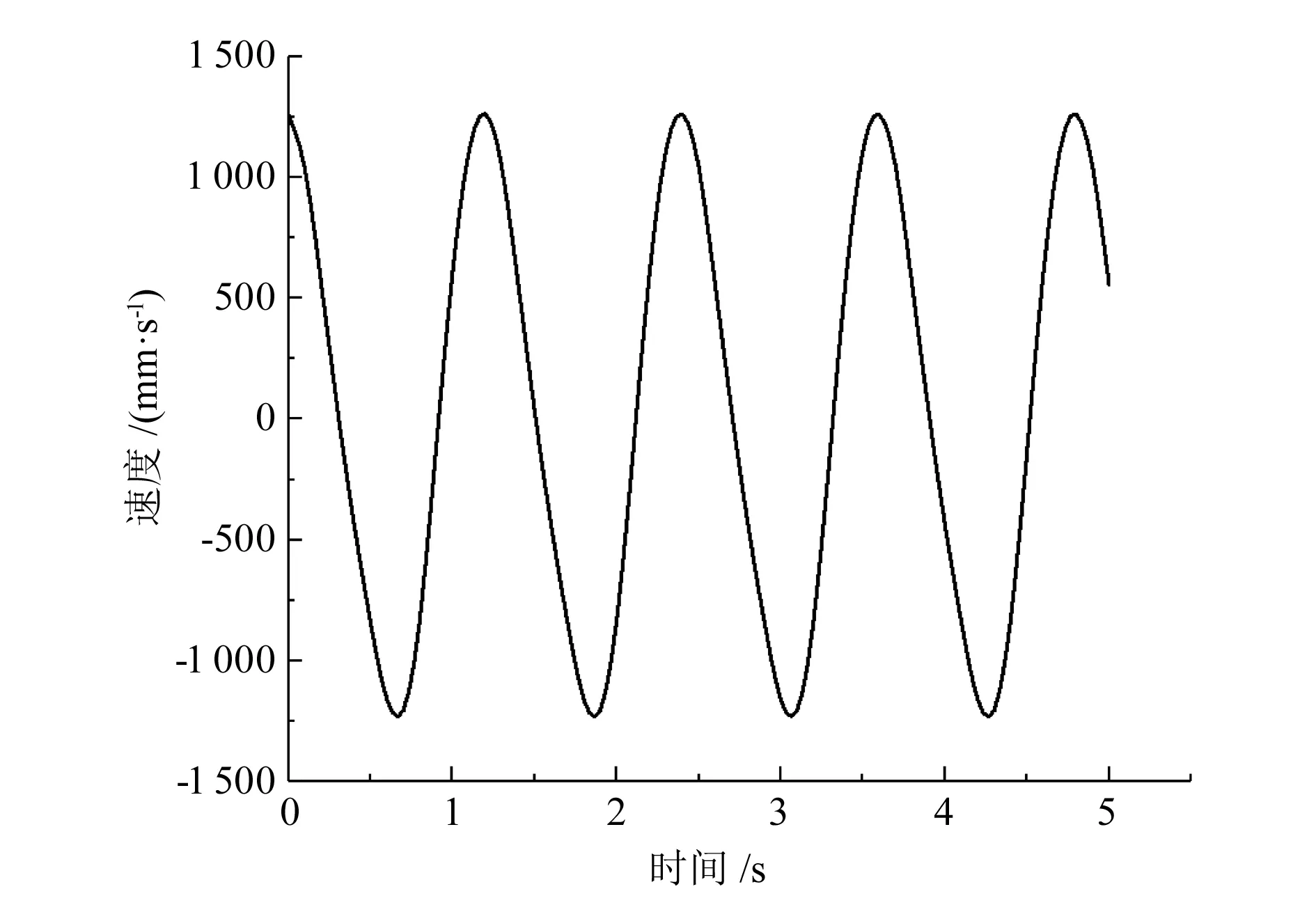
图9 割刀速度随时间变化曲线图
由图10可以看出,割刀的加速度变化曲线也呈近似正弦曲线。割刀的最大加速度出现在其最大位移处,而最小加速度出现在初始点。
4 性能试验研究
在挺水植物及沉水植物生长茂盛期间,对湿地轻型两栖式多功能工作机综合收获性能进行测试,如图11所示,测试结果见表1。结果表明:该湿地轻型两栖式多功能工作机可以通过调节切割深度在复杂地形条件下连续收获沉水植物和大面积挺水植物,在一定的条件下满足复杂的两栖作业要求,工作性能稳定可靠。
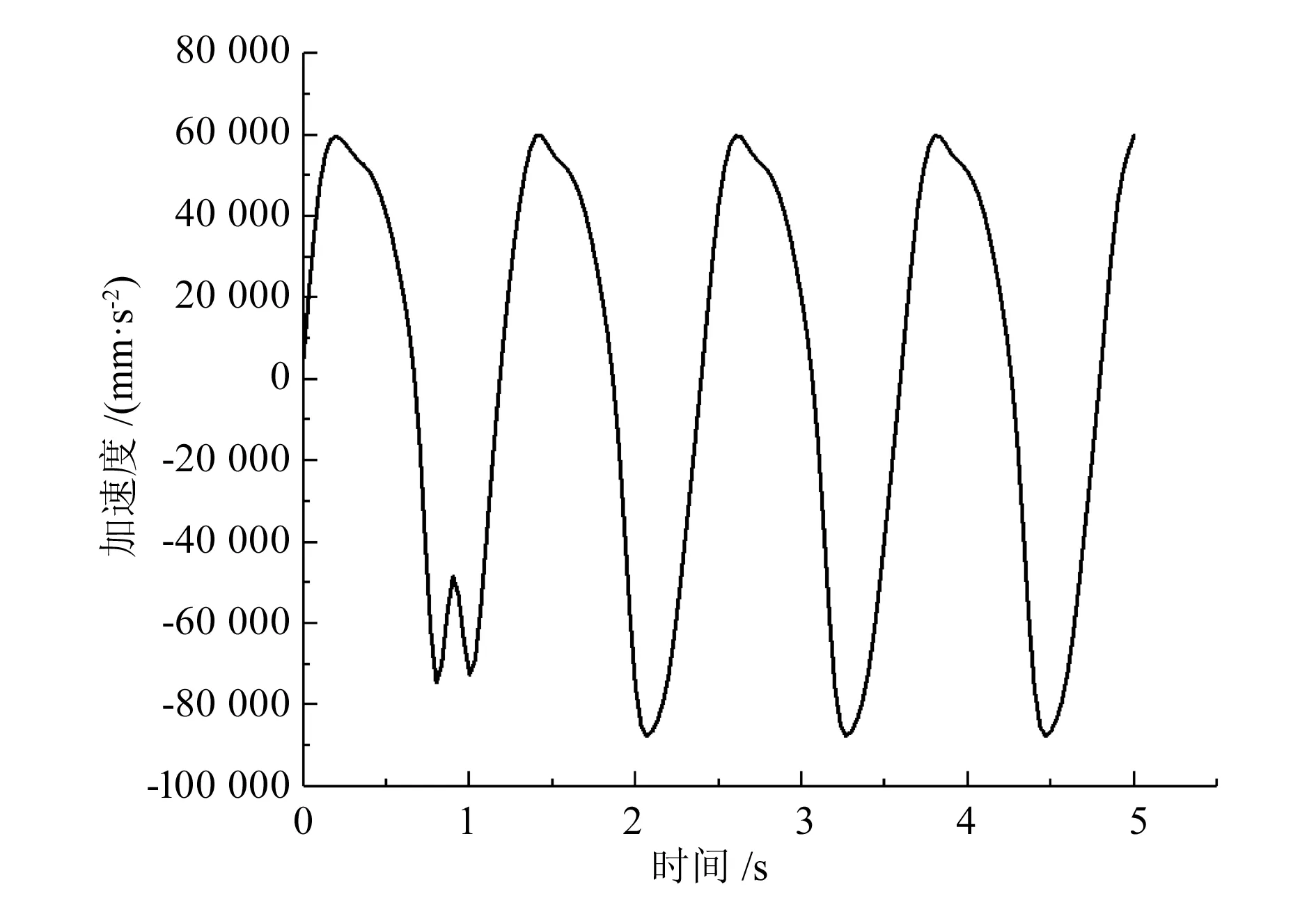
图10 割刀加速度随时间变化曲线图

图11 水中测试图

表1 试验结果
5 结论
1)对湿地轻型两栖式多功能工作机的关键部件进行了运动分析,从理论上证明割刀相对于时间的位移、速度、加速度变化曲线均呈正弦规律。
2)运用三维建模软件SolidWorks建立模型,并导入仿真软件ADAMS得到割刀位移、速度和加速度的变化规律曲线,割刀的最大速度出现在初始点,零速度出现在割刀的最大位移处;割刀的最大加速度出现在其最大位移处,最小加速度值出现在初始点。
3)试验结果表明,湿地轻型两栖式多功能工作机在满足设计要求的同时也能保证工作的效率。
对于湿地轻型两栖式多功能工作机的传动系统以及切割器刀片的高度确定还需要进一步研究,以达到更好的切割效果。
猜你喜欢
化工管理(2021年7期)2021-05-13
设备管理与维修(2019年22期)2019-12-19
活力(2019年17期)2019-11-26
中南大学学报(自然科学版)(2016年2期)2017-01-19
铁道通信信号(2016年10期)2016-06-01
汽车工程(2016年11期)2016-04-11
当代化工研究(2016年7期)2016-03-20
现代制造技术与装备(2015年4期)2015-12-23
黑龙江工程学院学报(2015年5期)2015-12-04
汽车工程(2014年7期)2014-10-11
