基于vissim仿真的高速公路客货分道动态控制
2022-01-19 01:20:00郭丽苹朱晓东高佳宁罗瑞琪由婷婷
交通科学与工程 2021年4期
郭丽苹,朱晓东,高佳宁,罗瑞琪,由婷婷
(中国市政工程华北设计研究总院有限公司,天津,300074)
中国经济水平不断发展,私家车、物流运输货车等车辆逐年增多,高速公路的服务水平却不断下降。如何对正在运营的高速公路进行智能控制管理,提高道路的运行效率,成为了亟待研究的问题。考虑到客车和货车在行驶过程中速度的差异及行驶过程中相互干扰的现象,国内外许多专家提出客货分线、客货分道的控制策略。
20 世纪20 年代初期,美国交通运输部开始对可变车道进行研究,学者也逐步提出了客货分道的理念[1-2]。Mason 等人[3]基于国外道路多为单向5条车道的情况,提出将道路分成3条客车专用车道和2 条货车专用车道的分配方法。鲁翠娥等人[4]用元胞模型仿真了不同比例的货车对高速公路交通流的扰动影响。李冠峰等人[5]提出了高速公路客货车分道通行的概念。刘晨辉[6]论述了在不同交通量和客货比的情况下,实施不同货车限行措施、道路通行效率和运营安全性。王新慧[7]提出了采用标志标线分隔车道和设施分隔道路的选择模型和实施条件。马捷[8]提出了适用于客货分道管理系统的评价指标体系。但客货分道的研究主要针对客货分道管理方法的对比及具体实施措施,而不同车道数、不同交通量下的动态客货分道控制研究少见。因此,作者拟通过vissim 建立模型进行仿真,验证客货分道控制的效果,寻找该系统的适用范围,提出客货分道动态控制系统流程图。
1 客货分道划分方法
客货分道指采用设置标志或标线的方法来分隔客货车辆。客货分道管理方法应具有实用性和操作性。道路上的交通量和客货比不断变化,因此,合理的客货分道方式也实时变化。车道划分的影响因素主要包括:车道数量、交通流量和客货比等。为满足超车等需求,客货分道至少要单向三车道及以上,而目前国内单向五车道以上的高速公路相对较少,同时考虑到仿真及理论分析的普适性和简约性,本研究对高速公路客货分道的分析分为3种情况:单向三车道、单向四车道和单向五车道。
1.1 单向三车道
客货分道应先将不同车型折算成标准小客车,然后将客车标准量N客比货车标准量N货,即N客/N货,将其定义为a。在考虑车道划分多个影响因素的基础上,单向三车道客货分道可划分为3种形式见表1。
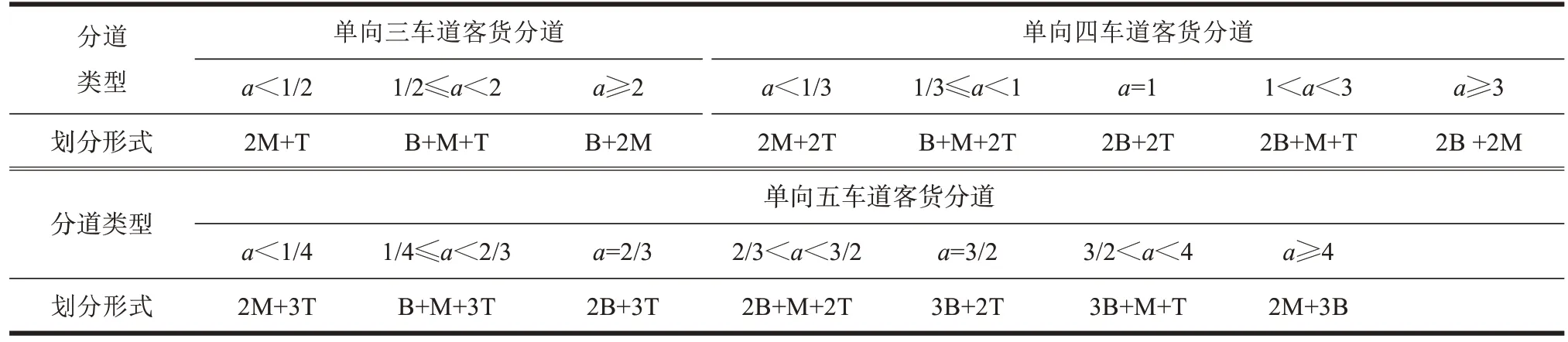
表1 客货分道划分表Table 1 Division of passenger-cargo
当a<1/2 时,理论上应采用1 条混行车道+2条货车车道(M+2T)的划分形式,鉴于小客车有换道超车需求,可采用2 条混行车道+1 条货车车道(2M+T)的划分形式。当1/2≤a<2 时,可采用1 条客车车道+1 条混行车道+1 条货车车道(B+M+T)的划分形式。当a≥2 时,应采用2 条客车车道+1条混行车道(2B+M)的划分形式,鉴于货车有换道超车需求,可采用1 条客车车道+1 条混行车道+1 条货车车道(B+M+T)的划分形式。以2 条混行车道+1 条货车车道(2M+T)的划分形式为例,绘制划分形式图,如图1所示。

图1 2M+T划分形式Fig.1 The 2M+T division form
1.2 单向四车道
单向四车道客货分道可划分为5种形式见表1。
1.3 单向五车道
单向五车道客货分道可划分为7种形式见表1。
2 仿真模型建立与参数设定
采用vissim软件,分别对单向三车道、四车道和五车道建立仿真模型分析客货分道的效果,并寻找该系统的适用界限[9],以单向四车道为例,建立仿真模型和仿真参数的设定。
2.1 道路条件
以美国加利福尼亚州i5 高速公路为例进行建模,该道路主线为双向八车道,车道宽度为3.66 m,设计速度为112.65 km/h。仿真选取单向车流分析,路网为单向四车道,在进行三车道和五车道仿真时,分别通过关闭1 条车道和增加1 个车道的方式构建路网。
2.2 交通量的选取
不同交通量对道路车辆通行的影响很大,从道路服务水平的角度出发,选取合适的客货分道控制区间。
根据美国交通运输委员会的《HCM》手册,服务水平分为六级。A、B 级服务水平为自由运行或自由交通流,相互间不会产生干扰,因此,不考虑加入人为的控制。E级服务水平为流率达到通行能力下的运行状况,车辆运行状况极不稳定,F级服务水平指拥堵车流。因这2个服务水平下驾驶自由度受到极大限制,人为控制很难起到正面效应,因此同样不考虑加入人为控制。C级服务水平为平均行程车速接近自由流速度,驾驶自由度明显受到限制。D级服务水平为自由度已受到较严重限制。为降低车辆间的相互干扰,降低行车延误,提高平均车行速度,考虑采用该客货分道系统进行车流控制,即自由流速度为110 km/h,交通量在1 210~2 135 pcu/(h·ln)之间的情况下,进行客货分道动态控制。
2.3 交通流组合形式
为评估客货分道控制效果,寻找适用的大小界限,选取 1 440、1 670、1 900 pcu/(h·ln) 3 种交通流状态,并分为以多种a值的交通流组合进行分析,因单向四车道的判断决策点分别为a=1/3、1、3,因此,以a=1/4、2/3、2、4为例,不同比例不同交通流量下的车辆组合形式见表2。
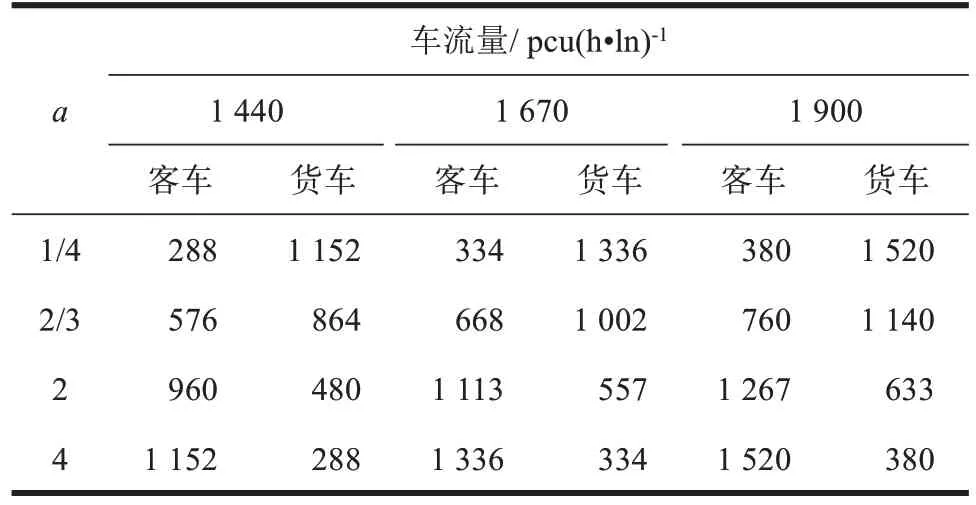
表2 不同交通量及客货比的车辆组合形式Table 2 Vehicle combinations with different traffic volume and passenger freight ratio
仿真中,选取货车当量系数为1.5,即:表4中货车的数量,在仿真车流量数据输入时,应采用除以1.5 以后的数据。车道断面交通量应将客车数加上处理后的货车数,用得到的和乘以车道数。以车流量 1 440 pcu/(h·ln),a=1/4,货车交通量为1152/1.5=768 辆。断面车流量为(288+768)×4=4 224 辆/h。
在仿真参数设置中,客车数比处理后的货车数设置为相对车流比例,断面车流量即为车辆输入数据。
2.4 车型设置
小汽车长度3.75~4.76 m,宽度1.85~2.07 m;货车长度10.22 m,宽度2.50 m。
2.5 车速设置
小汽车88~130 km/h;货车75~110 km/h。
2.6 仿真参数
为使仿真数据在车流平稳状态下输出,数据采集从3 600 s 开始,采集时间间隔为3 600 s。仿真时间根据不同的交通流组数,设置为:(交通流组数+1)×3 600 s。
2.7 评估指标
评估指标选用车辆路网性能中平均延误、平均速度对客货分道效果进行分析。
3 仿真结果评估
以单向四车道为例,阐述仿真的方法、思路、分析和结果,最后简要介绍单向三车道和单向五车道的仿真结果。
3.1 四车道客货分道仿真效果评估
单向四车道时,仿真结果如图2~3所示。
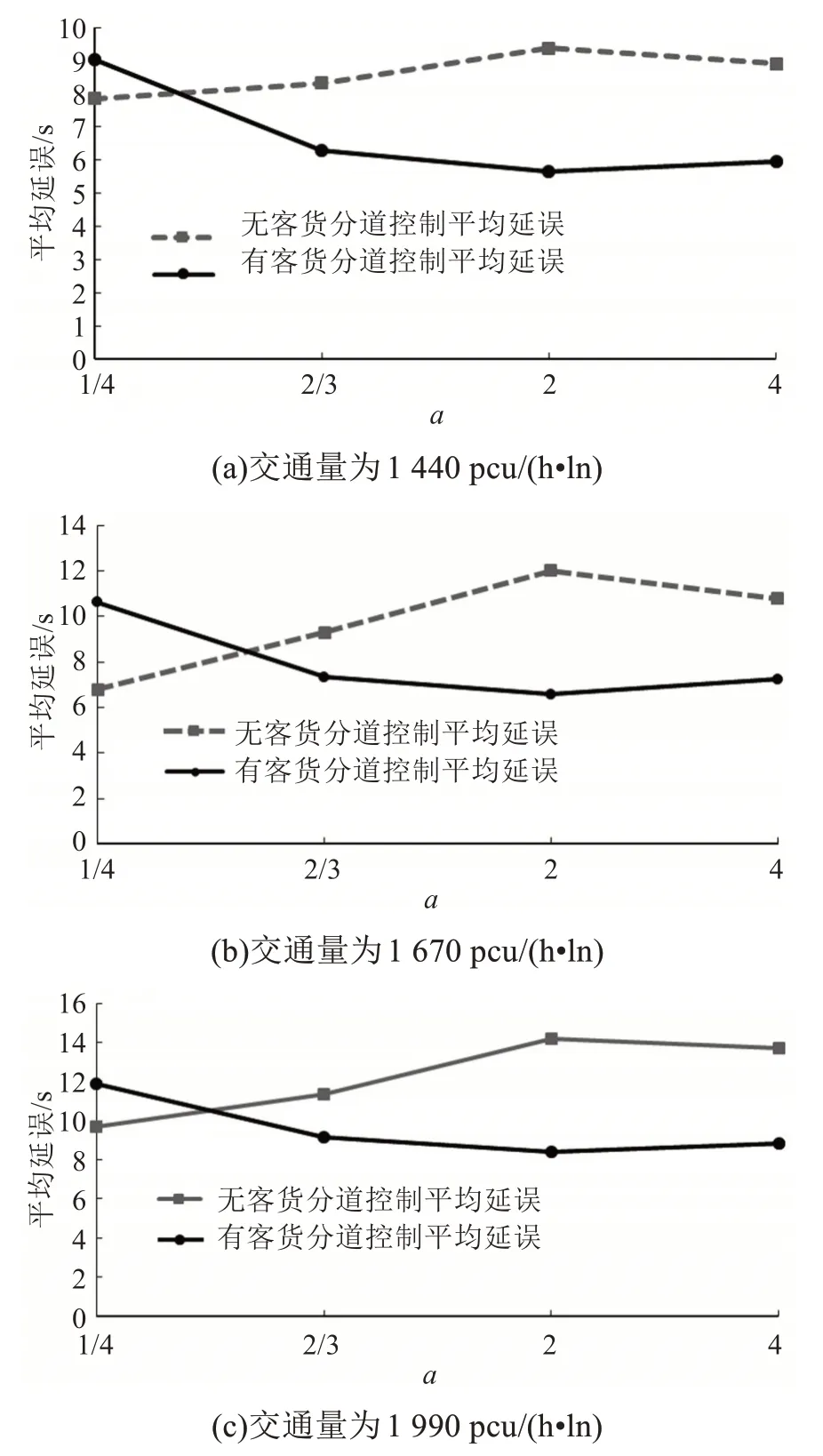
图2 四车道有无客货分道平均延误对比Fig.2 Comparison of average delay of four lanes without passenger and freight separation

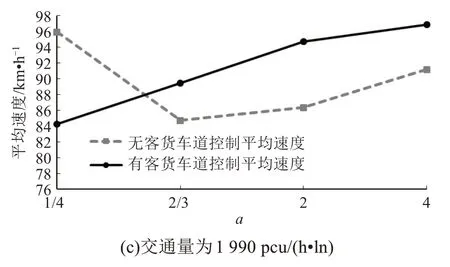
图3 四车道有无客货分道平均速度对比Fig.3 Comparison of average speed of four lanes with or without passenger and freight separation
从图2~3中可以看出,在单向四车道,当a=2/3、2、4 时,客货分道控制在3 种交通流状态下,均取得了正面效应,降低了平均延误,提高了平均速度,增大了道路通行能力,提高了驾驶员的舒适度。但a=1/4 时,客货分道控制未取得正面效应,不但没有使交通效率提高,反而造成了延误增加,平均速度降低。
由表3 可知,单向四车道,当交通量为1 670 pcu/(h·ln),a=2/3、2、4 时,采用客货分道控制,降低了平均延误,提高了平均速度,增大了道路通行能力。当a=2 时,效果最为显著,延误降低率达到了45.26%,速度提高率达到了9.50%。但a=1/4 时,延误增加了56.64%,速度降低了13.51%。表明:当a值很小或很大时,可能存在客货分道效果较差的情况,为分析产生该情况的具体a值,进行了客货分道适用范围大小界限仿真。
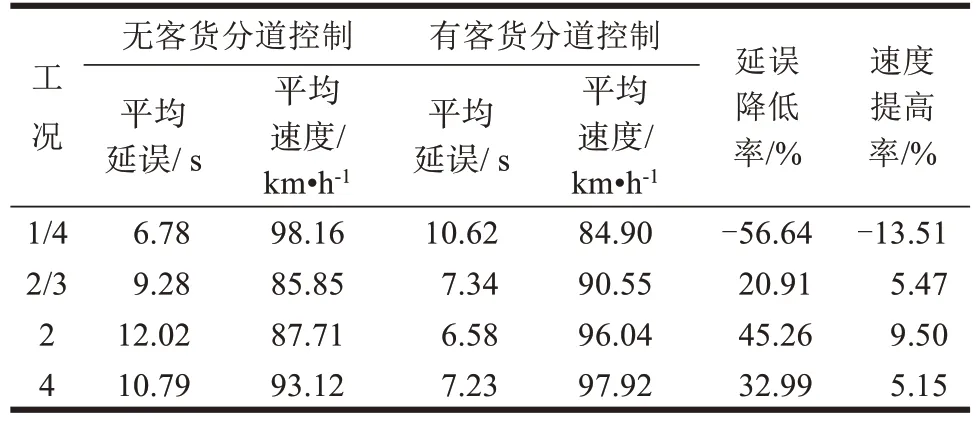
表3 客货分道控制下交通量为1 670 pcu/(h·ln)的仿真结果Table 3 Analysis of simulation results of passenger and freight lane separation with the traffic volume of the 1 670 pcu/(h·1n)
3.2 四车道客货分道大界限仿真结果评估
为分析四车道客货分道的大界限,选取a=6、8、10、20、30、40、50 进行仿真,仿真结果如图4~5所示。
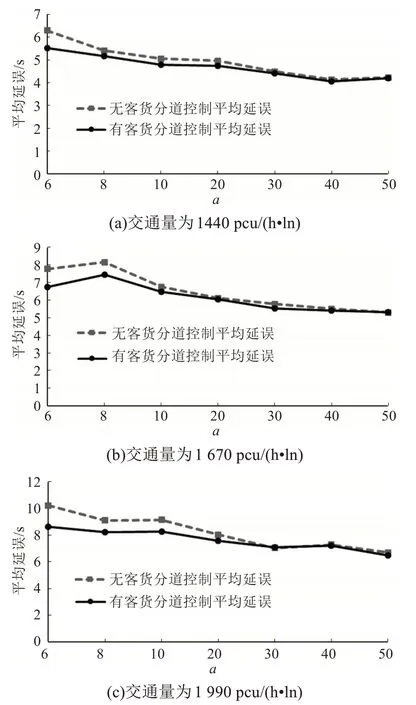
图4 四车道大界限仿真平均延误对比Fig.4 Comparison chart of average delay of four lane of large boundary simulation
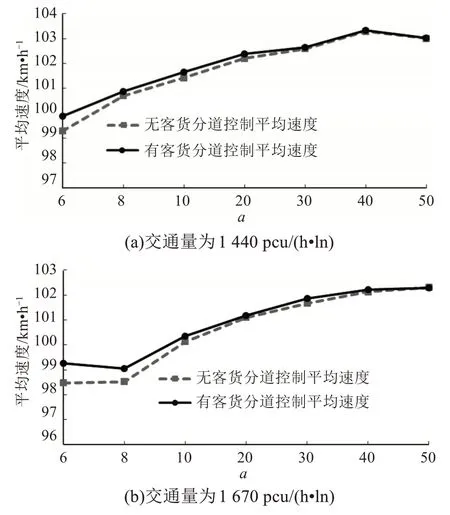
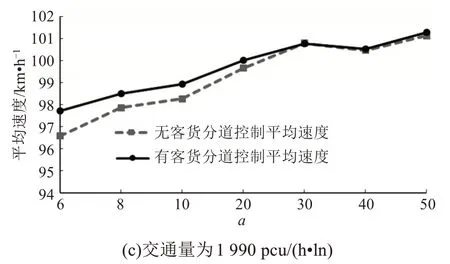
图5 四车道大界限仿真平均速度对比Fig.5 Comparison chart of average speed of four lane of large boundary simulation
从图4~5中可以看出,单向四车道,当a=6、8、10、20时,客货分道控制在3种交通流状态下,均取得了正面效应。但当交通量为1 670 pcu/(h·ln)、a=50,以及交通量为1 990 pcu/(h·ln)、a=30时,客货分道控制产生了负面效应。因此,为避免客货分道控制带来不必要的负面效应,单向四车道在a>20时,不宜对交通流进行客货分道控制。
3.3 四车道客货分道小界限仿真结果
为分析四车道客货分道的大界限,选取a=2/7、1/3、2/5、1/2、3/5 时进行仿真,仿真结果如图6~7所示。

图6 四车道小界限仿真平均延误对比Fig.6 Comparison of average delay of four lane of small boundary simulation
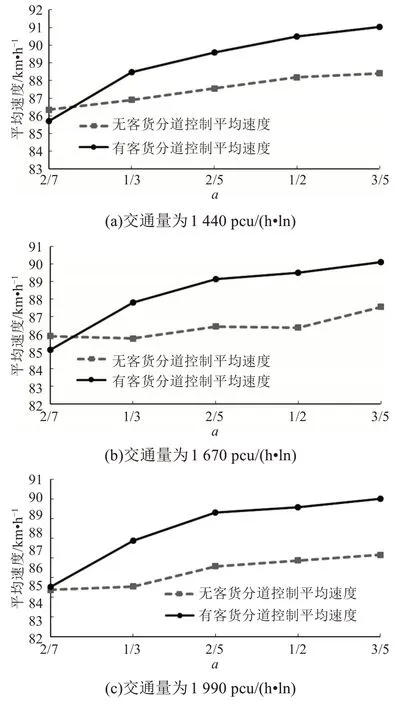
图7 四车道小界限仿真平均速度对比Fig.7 Comparison chart of average speed of four lane of small boundary simulation
从图6~7中可以看出,在单向四车道,当a=1/3、2/5、1/2、3/5 时,客货分道控制在3 种交通流状态下,均取得了正面效应,但当a=2/7 时,客货分道控制产生了负面效应。因此,当a<1/3,控制策略为2 条混行车道+2 条货车车道(2M+2T)时,不宜对交通流进行客货分道控制。但当a=1/3时,采用1 条客车车道+1 条混行车道+2 条货车车道(B+M+2T)客货分道控制策略,产生了很好的正面效应,延误降低率、速度提高率均较高。当a<1/3 时,采用1 条客车车道+1 条混行车道+2 条客车车道(B+M+2T)客货分道控制策略,会在一定比例范围内同样产生正面效应,因此,对该情况进行进一步的仿真分析。
3.4 四车道a<1/3和B+M+2T的仿真结果
为验证四车道a<1/3 在1 条客车车道+1 条混行车道+2 条货车车道(B+M+2T)策略下的客货分道仿真效果,选取a=1/15、1/12、1/10、1/8、1/6、1/4 的6 组数据进行仿真,仿真结果如图8~9所示。
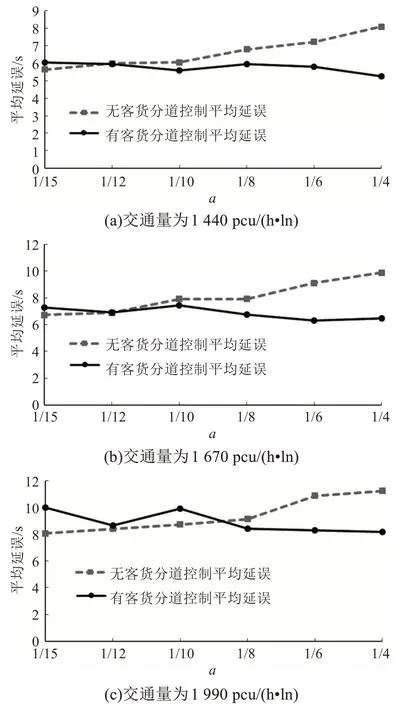
图8 四车道a<1/3在B+M+2T策略下仿真平均延误对比Fig.8 Comparison of simulation average delay of four lane with a<1/3 under B+M+2T strategy
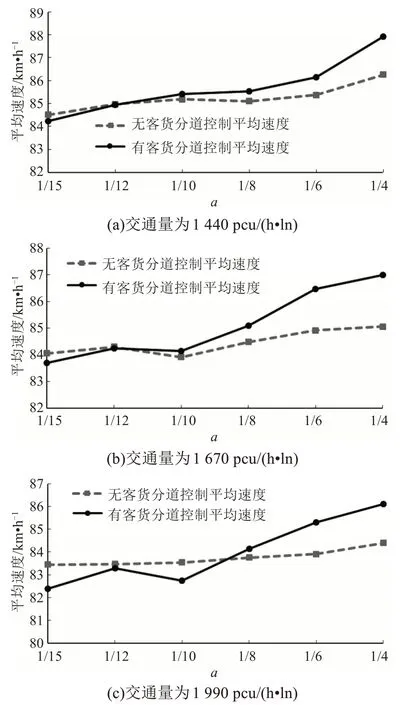
图9 四车道a<1/3在B+M+2T策略下仿真平均速度对比Fig.9 Comparison of simulated average speed of four lane with a<1/3 under B+M+2T strategy
从图8~9 中可以看出,在1 条客车车道+1 条混行车道+2 条货车车道(B+M+2T)控制策略下,当a=1/8、1/6、1/4 时,客货分道控制在3 种交通流状态下,均取得了正面效应。但在3种交通流状态下,当a=1/15、1/12 且交通量为 1 990 pcu/(h·ln)、a=1/10 时,客货分道控制均产生了负面效应。因此,为避免客货分道控制带来不必要的负面效应,在四车道B+M+2T 控制策略下,a<1/8时,不宜对交通流进行客货分道控制。
3.5 三车道客货分道界限仿真
运用四车道客货分道控制的仿真与分析方法,得到三车道的仿真界限分析结果为:
1)三车道客货分道大界限的仿真结果:在单向三车道下,当a为6、8、10、20 时,客货分道控制在3种交通流状态下,均取得了正面效应。但当交通量为 1 440 pcu/(h·ln),a为 30、40 时,客货分道控制产生了负面效应。因此,为避免客货分道控制带来不必要的负面效应,单向三车道在a>20时,不宜对交通流进行客货分道控制。
2)三车道客货分道小界限的仿真结果:当a<1/2时,在控制策略为2条混行车道+1条货车车道(2M+T)下,客货分道控制均产生了负面效应,因此,摒弃该控制策略;当a<1/2 时,控制策略为B+M+T,在3 种交通流状态下,a=1/4、2/7、1/3、2/5、1/2 时,客货分道控制均取得了正面效应。但在3 种交通流状态下,a=1/8 且交通量为1 990 pcu/(h·ln)或a=1/6 时,客货分道控制均产生了负面效应。因此,为避免客货分道控制带来不必要的负面影响,单向三车道在a<1/4 时,不宜对交通流进行客货分道控制。
3.6 五车道客货分道界限仿真
运用四车道客货分道控制的仿真模型与分析方法,得到五车道的仿真界限结果为:
1)五车道客货分道大界限仿真的仿真结果:在单向五车道下,当a=6、8、10时,客货分道控制在3种交通流状态下,均取得了正面效应。但当交通量为 1 440 pcu/(h·ln),a=40 时;当交通量为1 670 pcu/(h·ln),a=20、30 时;当交通 为 1 990 pcu/(h·ln),a=30 时,客货分道控制产生了负面效应。因此,为避免客货分道控制带来不必要的负面效应,单向五车道在a>10时,不宜对交通流进行客货分道控制。
2)五车道客货分道小界限仿真的仿真结果:当a<1/4 时,控制策略为2 条混行车道+3 条货车车道(2M+3T),客货分道控制均产生了负面效应,平均延误增加,平均速度降低,因此摒弃该控制策略。当a<1/2 时,控制策略为1 条客车车道+1 条混行车道+3 条货车车道(B+M+3T),在3种交通流状态下,a=1/12、1/10、1/8、1/6、1/4时,客货分道控制均取得了正面效应。但在交通量为 1 440 pcu/(h·ln)和 1 990 pcu/(h·ln),a=1/15时,客货分道控制产生了负面效应。因此,为避免客货分道控制带来不必要的负面影响,单向五车道在a<1/12 时,不宜对交通流进行客货分道控制。
4 动态客货分道流程
根据本试验的仿真结果,考虑客货分道系统可根据实时交通量变化进行动态控制,绘制流程图。
4.1 主流程
客货分道控制主流程如图10 所示。首先判断是否发生交通事故,若发生交通事故,则中断流程,并打印“发生交通事故,不宜启动客货分道控制流程”。若未发生交通事故,从检测器读取交通状态数据,判断服务水平。当服务水平在2~4级服务水平之间,即交通量在1 210~2 135 pcu/(h·ln)之间时,根据道路条件,判断车道数,进入相应客货分道控制子流程,选定控制方案,否则打印“未包含适合该道路形式的控制子流程”,若工程需要,可增设子流程。当方案执行到预设时间5 min,流程循环至最初判断交通事故的步骤。

图10 客货分道控制主流程Fig.10 Main flow chart of passenger cargo lane control
4.2 单向四车道子流程
当道路为单向四车道时,选择进入单向四车道客货分道子程序。
单向四车道客货分道控制子流程如图11所示。通过获取道路检测器的交通流数据,将货车交通量转换成标准小汽车交通量,判断a的比值所在区间,当1/8≤a<1 时,采用1 条客车车道+1 条混行车道+2 条货车车道(B+M+2T)的划分形式。当a=1 时,采用2 条客车道+2 条货车道(2B+2T)的形式。当1<a<3 时,采用2 条客车车道+1 条混行车道+1 条货车车道(2B+M+T)的划分形式。当3≤a≤20 时,采用3 条客车车道+1 条混行车道(3B+M)的划分形式,输出选定客货分道方案。
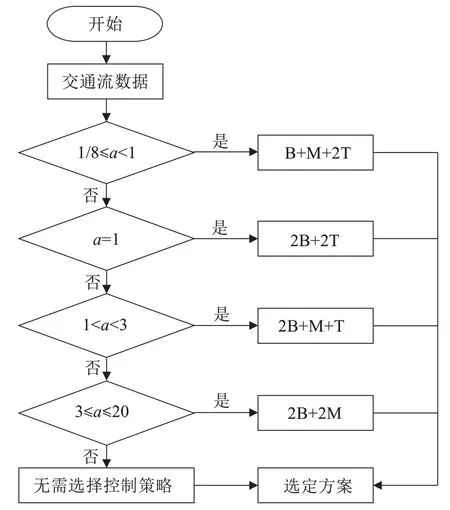
图11 单向四车道客货分道控制子流程Fig.11 Sub flow chart of one-way four lane passenger and freight lane separation control
4.3 单向三车道子流程
当道路为单向三车道时,选择进入单向三车道客货分道子程序。控制子流程如图12所示。

图12 单向三车道客货分道控制子流程Fig.12 Sub flow chart of one-way three lane passenger-cargo lane separation control
4.4 单向五车道子流程
当道路为单向五车道时,选择进入单向五车道客货分道子程序。控制子流程如图13所示。
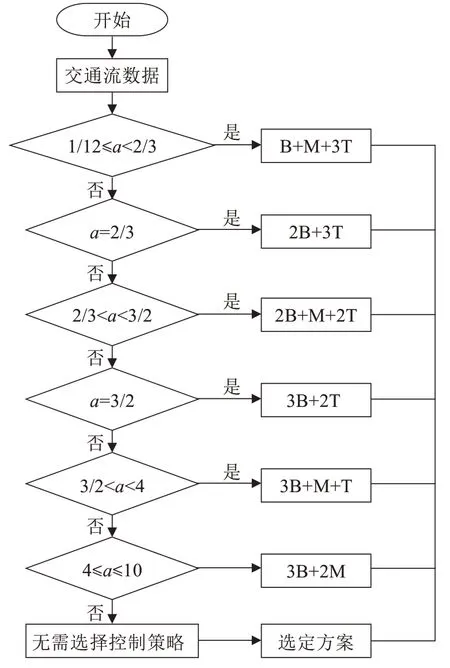
图13 单向五车道客货分道控制子流程Fig.13 Sub flow chart of one-way five lane passenger-cargo lane separation control
5 结论
论基于vissim软件仿真,依托美国加利福尼亚州i5高速公路数据建模仿真,得到结论为:
1)在一定条件下,客货分道可降低车辆平均延误,提高车辆平均速度,提高道路通行效率。
2)仿真道路客货分道控制系统适用范围:单向四车道,1/8≤a≤20;单向三车道,1/4≤a≤20;单向五车道,1/12≤a≤10。
3)在后续工作中,可根据不同道路及交通流的情况,完善该客货分道动态控制系统的适用界限分析。
4)对该系统软件开发的相关内容进一步研究,并对流程中的关键节点,如交通事故判断和交通流数据分析方法进行细化研究。
猜你喜欢
小猕猴学习画刊(2021年5期)2021-06-15 03:23:24
湖南交通科技(2020年1期)2020-04-08 01:12:54
百科探秘·航空航天(2019年12期)2019-09-26 06:30:49
宝藏(2018年9期)2018-09-18 11:09:36
中国医学人文(2018年2期)2018-01-16 12:13:24
环球市场(2017年29期)2017-11-28 10:22:41
公路交通科技(2016年2期)2016-02-23 05:28:00
中国交通信息化(2015年10期)2015-06-06 06:39:23
中国交通信息化(2014年4期)2014-06-05 03:51:09
城市道桥与防洪(2013年12期)2013-03-11 15:19:55