
工业机器人应用一体化教学创新平台的研究
2022-01-18 09:18张凤丽周旺发邓三鹏权利红阎兵
机器人技术与应用 2021年4期
张凤丽 周旺发 邓三鹏 权利红 阎兵
(1天津职业技术师范大学机器人及智能装备研究院,天津,300222;2天津博诺智创机器人技术有限公司,天津,300352;3天津市智能机器人技术及应用企业重点实验室,天津,300352)
0 引言
随着“学历证书+若干职业技能等级证书”(简称1+X证书)制度试点工作的推进,在工业机器人应用领域相关人才的培养和职业技能等级证书的培训考核需求越来越大。但企业和院校在培训和教学过程中,受到费用成本、车间环境以及教学场地等因素的限制,在开发工业机器人课程时,面临实训项目单一、设备利用率不高、实训项目与企业需求脱节等问题。本文通过软硬件结合,研究一个集成度高、模块化、功能丰富的工业机器人应用一体化教学创新平台,该平台支持虚拟仿真和虚实互动,培养学员的动手操作能力,提高教学质量,降低教学成本,减小危险发生的可能性,满足工业机器人应用型人才培养的要求。
1 基于模块化的创新平台机械系统设计
本文以工业机器人典型应用为主体,结合码垛、搬运、分拣、焊接、打磨、轨迹、装配等工业机器人应用场景,采用模块化设计,完成创新平台的整体结构设计,包括快换工具模块、旋转供料模块、皮带运输模块、变位机模块、行走轴、轨迹模块、码垛模块、搬运模块、涂胶模块、冲压压紧模块、原料仓储模块、井式供料模块、RFID模块、视觉检测模块。平台各模块组成如图1所示。

图1 平台各模块组成
1.1 标准实训台模块
标准培训台由铝合金型材搭建,四周安装有机玻璃可视化门板,底部安装钣金,平台上快速安装用回形块与各模块底端沟槽契合,无需工具便可快速拆装,可根据培训项目更换模块位置。平台下部设有备用模块放置架。
图2为模块安装前俯视图。

图2 模块安装前俯视图
图3为部分模块安装俯视图。

图3 平台俯视图(部分模块非全部)
1.2 快换工具模块
以工业机器人典型应用为核心,研制气爪夹具、真空吸盘工具、焊枪、绘图笔、激光笔、标定工具等多种工具,设计自动工具交换装置,实现机器人末端工具的快速更换。同时,在支撑架平台上设计了两根导向柱,用于准确定位快换工具的放置位置,避免机器人自动安装工具示教点失效。
图4为快换工具模块库。

图4 快换模块库
图5为快换工具模块设计图。
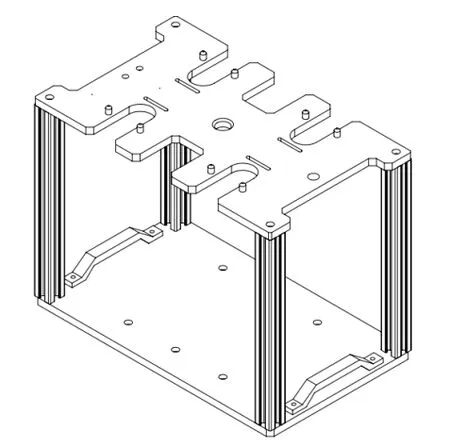
图5 快换工具模块
1.3 电气系统接口设计
本文选取自动化生产线中的工业机器人、西门子S7-1200PLC、伺服电机、伺服驱动、异步电机、变频器、HMI、RFID等设备,以西门子S7-1200PLC为主控制器,结合工业机器人在自动化生产线的应用,将电气设备应用到旋转供料模块、变位机模块、打磨模块、皮带运输模块以及行走轴中,建立模块与PLC的通信;设计统一的电气接口,图6为快换电路接口,图7为快换气路接口。为避免模块更换后电气接口不通用造成重新接线的麻烦,本文采用新的电气接口技术,设计快换模块工具头与底座之间电气接口,提高快换模块电路可靠性。

图6 快换电路接口

图7 快换气路接口
2 创新平台电气系统及人机交互模块设计
本文以PLC为主控制器,结合工业机器人在自动化生产线的应用,研究适用于旋转供料模块、变位机模块、打磨模块、皮带运输模块以及行走轴等模块的分布式控制系统,包含V90伺服电机、步进电机驱动,建立模块与PLC的通信及人机交互系统。图8为设备控制网络拓扑图。

图8 设备控制网络拓扑图
3 基于机器视觉技术的一体化创新平台传感系统
本文设计基于多源传感器信息融合的传感系统,并融入到设计工业机器人应用一体化教学创新平台;基于机器视觉研究通用视觉检测与定位方法,以像素坐标作为输入,实际坐标作为期望输出,像素坐标的转换坐标作为样本输入的实际输出,研究 Harris 和SV 结合的角点识别算法,建立机器视觉检测模型。图9为视觉系统软件。

图9 视觉系统软件
4 创新平台实训项目开发
实训项目严格按照《工业机器人应用编程》1+X职业技能等级标准以及《工业机器人系统操作员》国家职业技能标准开发,可渗透到中、高等职业院校的不同年级中进行,并可丰富教学内容,优化课程设置,实现1+X的有机衔接。
实训项目集成了工业机器人示教编程、离线编程、虚拟调试、伺服驱动、PLC控制、变频控制、HMI、机器视觉、传感器应用、液压与气动、总线通信、数字孪生和二次开发等技术的应用,涵盖了工业机器人、S7-1200、TP700触摸屏和视觉应用等方面的基础知识,并可对S7-1200与工业机器人、G120变频器、V90伺服、RFID和视觉的基础应用进行实际训练。
参考工业机器人在码垛、搬运、分拣、焊接、打磨、轨迹、装配等场景中的应用,结合轨迹模块、码垛模块、搬运模块、涂胶模块、仓储模块、快换工具模块、旋转供料模块、变位机模块、打磨模块、井式供料模块、皮带运输模块、冲压压紧模块和行走轴,本文将训练内容分为单模块训练和综合训练。
单模块训练突出基础操作应用,包括电气接线、机械安装、气路连接、参数设定以及对工业机器人和PLC编程等训练;综合训练更加注重多模块协同,同时加入机器视觉,完成工业机器人自动化生产线综合调试。
开发的初级实训项目如表1所示,中级实训项目如表2所示。

表1 初级实训项目

表2 中级实训项目
5 结论
从工业机器人理论和实践教学需求出发,结合工业机器人应用型人才市场需求,本文研发的工业机器人应用一体化教学创新平台,已在天津机电职业技术学院、天津市职业大学、重庆工程职业技术学院、南通职业大学、湄洲湾职业技术学院、厦门城市职业学院、蚌埠技师学院、江苏盱眙中等专业学校等30余所院校的教学培训实践中得到应用,充分发挥出了设备的优势,体现了实训项目的实用性和训练的高效性,得到了各应用单位的好评。
工业机器人应用一体化教学创新平台,通过采用软硬件高度集成化、模块化设计且各模块机械连接和电气端口连接均标准化、统一化,可实现快速拆装、灵活组合,进行单模块训练和综合训练,开发满足不同层次学生的实训项目,利于开展分层次或项目驱动教学。同时,开发的实训项目与实际生产场景能够一一对应,既能调动学生学习兴趣将实际生产融入教学,提高教与学的效率,真正做到理实一体、学以致用。

图10 湄洲湾职业技术学院工业机器人实训室
总之,工业机器人应用一体化教学创新平台的训练,可以满足新职业“工业机器人系统操作员”以及“工业机器人应用编程”职业资格评价1+X证书的培训考核需求。
猜你喜欢
轮胎工业(2022年10期)2022-12-30
小太阳画报(2020年11期)2020-12-10
小太阳画报(2020年10期)2020-10-30
装备制造技术(2020年12期)2020-05-22
红领巾·成长(2018年10期)2018-11-19
读者(2017年18期)2017-08-29
计算机测量与控制(2017年6期)2017-07-01
电子制作(2017年8期)2017-06-05
制造业自动化(2017年2期)2017-03-20
轮胎工业(2017年9期)2017-03-09
