弱电网水电机组调速器参数优化方法
2022-01-18 06:27:36陈义宣李玲芳朱欣春
云南电力技术 2021年6期
陈义宣,李玲芳,朱欣春
(云南电网有限责任公司电网规划建设研究中心,云南 昆明 650011)
0 前言
随着电力建设的不断发展,电网结构和供电水平得到加强,但是,由于受自然条件、环境保护、古城保护或主网加强代价太高等因素的影响,仍然存在许多弱电网区域,云南地广人稀,水电资源丰富,这种情况尤为突出。由于地区弱电网与电网主网联系薄弱,联络线发生故障后,地区弱电网极易造成孤网,孤网后的频率稳定成为最主要的稳定问题。若地区弱电网水电机组调速器等参数不合理,极易造成孤网的频率失稳或因阻尼不足造成频率振荡。即孤网后易造成:
1)若地区弱电网向主网输送电力,孤网后频率暂态过程中,频率谷值过低,即使是功率富余故障(考虑高频切机正确动作,切未过切),仍可能造成低频减载动。
2)孤网后因水轮机调速器提供阻尼太低,甚至是负阻尼,极易发生频率振荡。
本文针对地区弱电网孤网后存在的频率稳定问题,提出水轮机调速器参数优化原则,建立含调速器、水轮机、发电机模型的水电机组稳定分析模型,利用主导极点法,实现弱电网水电机组调速器参数优化,提高了弱电网的稳定水平。
1 水轮机调速器参数优化原则
水轮机发电机组有多种工作状态,如机组开机、停机、空载、孤立电网运行、并网于大电网运行等。为适应不同工况,水轮机调速器一般也有不同的运行模式,即空载运行的频率调节模式、并网运行的开度调节模式、孤立运行孤网调节模式。每个调节模式分别设置相应的调节参数,调节模式切换时调节参数能自动切换。
目前水轮机调速器一般采用并联PID结构,主要参数为比例增益KP、积分增益KI、微分增益KD。PID参数设置不同,调节品质差别很大。只有选择合适的水轮机调速器的PID调节参数,才能够使调节系统具有优良的动态品质和优良的一次调频性能。在一定范围内增大KP有利于加快一次调频响应速度,改善一次调频动态响应特性,但是过大和过小的KP都会使得一次调频响应阻尼比减小,从而造成频率振荡问题。增大KI有利于提高一次调频响应速度,加快频率恢复速度,但是会降低频率响应阻尼比,有可能造成振荡问题。KI越小频率响应阻尼比越大,系统越稳定。一定范围内增大KD有利于改善一次调频动态响应特性,加快响应速度,但是KD过大不利于低频振荡。
基于调速器的切换特性及PID参数的影响规律,提出孤网及联网模式下PID参数优化原则:
联网开度模式下PID优化原则:满足联网时的功率快速调节,兼顾一次调频动态特性,在保证稳定的前提下尽可能增大KP和KI数值。
孤网模式下PID优化原则:对于孤网参数来说,应尽可能的使得阻尼比大一些以保证孤网后频率的稳定性,而一次调频动态特性可以有所牺牲,因此尽可能减小KP、KI值;对于参数KD,孤网模式下,KD的适度增大不会破坏低频振荡分量的阻尼比,并且有利于第二个峰值的减小,因而在孤网时可以适度增大KD。
2 水轮机调速器仿真分析模型
水电机组的原动机系统由水轮机和调速器组成,目前调速器广泛使用的改进型并联PID控制结构,调速器的液压系统可简化为一阶惯性环节。如图1(a)和图1(b)所示。
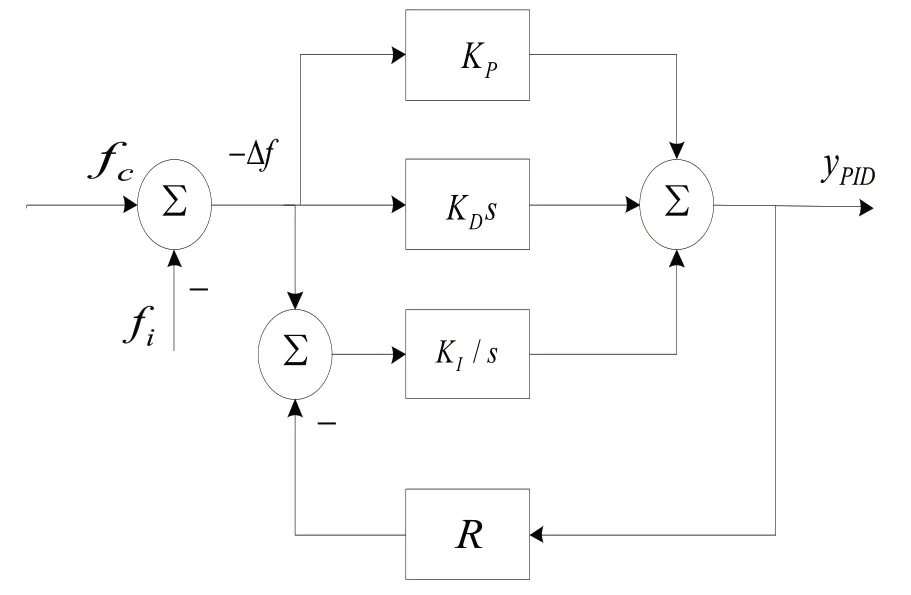
图1 (a) PID控制器结构
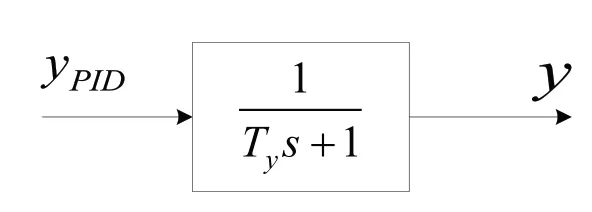
图1 (b) 调速器液压系统
图中fc为系统频率给定,fi为机组的频率,yPID为调节器输出,Kp、KI、KD分别为调速器的PID参数,R为调差系数,y为调速器开度,Ty(单位s)为液压系统时间常数。
整个调速器的传递函数表示为:

水轮机模型采用理想水轮机模型,传递函数为:

式中T(w单位s)为水轮机水锤效应时间常数。
考虑发电机模型后,整个水电机组采用如图2所示的结构,构成一个较为完整的水电机组稳定分析模型。
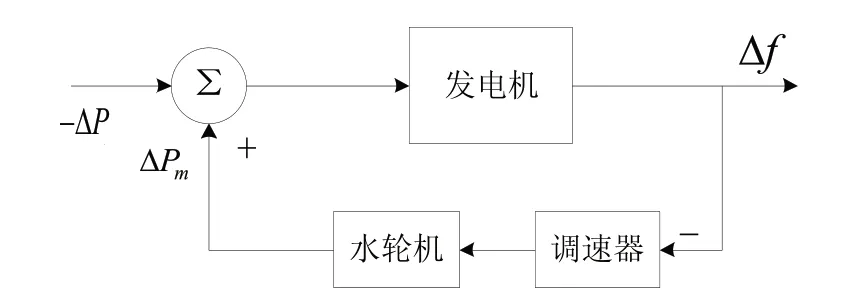
图2 水电机组模型
3 水轮机调速器参数优化方法
根据图2中的水轮机组模型可以写出该传递函数的闭环特征方程:

其中:
为进一步分析,将(3)改写为如下形式:

其中:

设式(4)的四个极点分别为-σ±jω和λ1、λ2,其中λ1、λ2可以是2个实根,也可以是一对共轭复根。令主导极点为-σ±jω,则式(4)可化为:

当系统的特征方程主导极点实部为负数时,系统将保持稳定。因此可以通过对调速器参数进行重新整定以重新配置系统特征方程的主导极点。具体步骤如下:
式(5)特征方程的主导极点为-σ±jω时,它的阻尼比为:

令:

式(4)和式(5)的多项式各系数相等,则有:
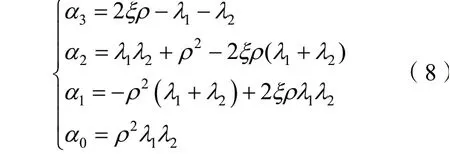
进一步令:

则式(9)可以改写为:

在选定阻尼比ξ和幅值ρ后,式(10)有4个方程和5个未知数。5个未知数分别为μ、ν、KI、KP和KD,并且考虑到在多机系统中KD过大会不利于系统稳定性,因而在参数整定中,直接将KD设为定值,那么在方程组(10)中就存在四个方程和四个未知数,可以利用牛顿法可以求出式(10)的解,从而得到整定后的KP和KI。
4 参数优化效果
以怒江电网为例,利用上述整定方法对怒江电网具有切换特性的水轮机调速器孤网参数进行整定,整定结果如下:
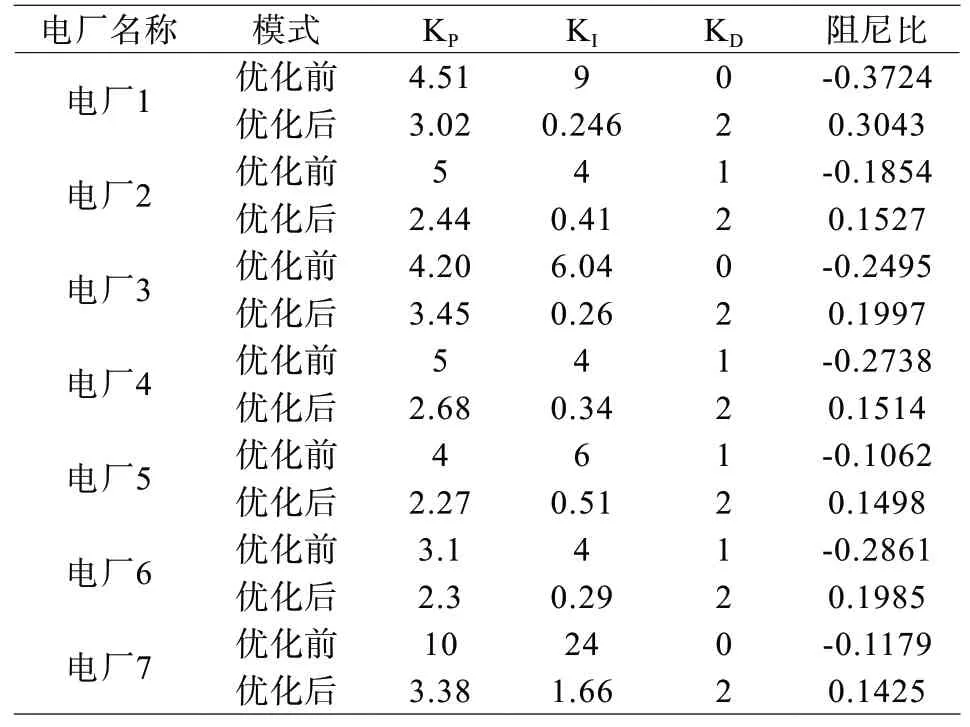
表1 孤网参数优化结果
可见,优化后的KP和KI参数上均有大幅度减小,而频率响应的阻尼比大幅增大。当兰坪~剑川220 kV线路故障后,兰坪分支孤网,仿真结果如图3所示。
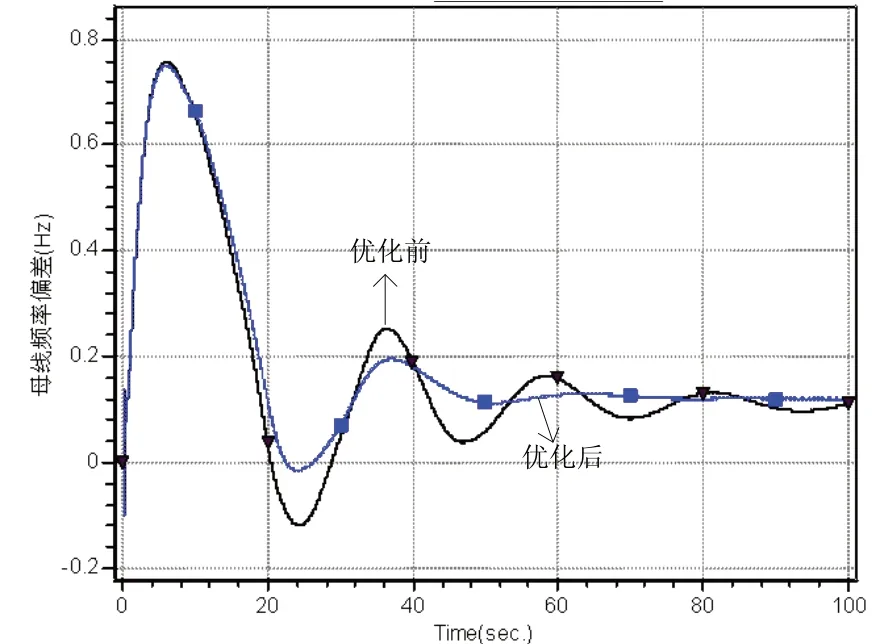
图3 孤网后频率响应对比
从仿真结果可知,参数优化后,再利用调速器的切换特性:
1)可以提高弱电网在孤网情况下功率过剩(向主网送电)故障下频率响应的最低峰值,降低功率缺额(从主网下网)故障下频率响应的最高峰值,有利于孤网后的频率稳定。
2)切换后的孤网参数一次调频响应阻尼比更大,有利于抑制孤网的频率振荡。
5 结束语
本文利用主导极点法,实现弱电网水电机组调速器参数优化,利用调速器的切换特性,设置联网、孤网不同调速器参数,既可以满足联网时的水电机组一次调频动态响应特性,又可以提高孤网时系统阻尼比,改善频率响应特性,提高了弱电网孤网后的频率稳定水平。
猜你喜欢
地震研究(2021年1期)2021-04-13 01:05:24
通信电源技术(2019年10期)2019-11-02 06:17:42
振动与冲击(2019年4期)2019-02-22 02:33:34
上海公路(2018年3期)2018-03-21 05:55:48
中国设备工程(2018年2期)2018-03-02 03:20:09
广州大学学报(自然科学版)(2016年2期)2017-01-15 13:42:55
水电站机电技术(2016年1期)2016-02-28 14:21:36
电网与清洁能源(2015年5期)2015-12-29 11:52:44
合成技术及应用(2015年3期)2015-12-11 08:36:27
电网与清洁能源(2015年2期)2015-02-28 16:03:13