
关于工业机器人专业应用型人才教学研究
2022-01-17 06:20陈浩
电子元器件与信息技术 2021年9期
陈浩
(吉林交通职业技术学院,吉林 长春 130012)
0 引言
伴随着当今时代科学技术的不断进步与发展,工业机器人的应用也更加的广泛,并对企业的经济增长起到了关键性作用。有效实现机器人的自动化,与专用人才的培养是分不开的,很多高校在进行工业机器人培养时缺乏实践性教学,需要不断进行教学改革,实行校企合作,有效实现专业应用型人才的培养。
1 工业机器人概述
工业机器人指的是在工业生产中,可以通过自身的控制来进行作业,从而完成企业的自动化生产任务,这种多关节的机械装置被称为工业机器人。在工业机器人自动化工作前,需要机器人工程师进行预编程,将工业机器人按照相应的工艺进行动作编程,然后通过相关的PLC指令使其不断重复进行动作,从而完成工业生产的自动化要求。目前为止,世界上有很多中工业机器人,最出名的有四种,分别是来自德国的库卡机器人,来自瑞士的ABB机器人,来自日本的发那科机器人和安川机器人[1]。
2 工业机器人专业应用型人才的现状分析
2.1 工业机器人的发展现状
工业机器人这个概念自从戴沃尔于1954年首次提出之后,经过几代工业机器人手臂式机构创新性的研究和设计,增加了plc控制技术、装配工艺技术、以及工程系统。现阶段,工业机器人被普遍应用于各个地区和国家的制造业中。同时,工业用的机器人由于它们具有安全、生产效率高等特点,也受到了许多企业的认可。特别是在汽车和零部件制造业、电子产品制造行业以及物流服务行业中,工业机器人的利用率己经成为了评价一个企业是否拥有智能化水平的重要标准。由于2020年已经基本完成了我国的工业机器人技术产业结构的调整与建设,这就说明我国的工业机器人将会继续实现可观的快速发展。也就是说,将来我国会随之缺乏工业机器人相关的专门技术人才。
2.2 工业机器人专业人才缺乏问题
目前的工业机器人技术专业的人才主要包括各种工业机器人技术系统的模拟仿真、集成设计、编程、调试、运行、操纵、营销,以及在智能化和自动化生产中的各种操纵、维护、改造和管理等高素质技术型人才。可是,我国多数高校虽然在专业课程上已经提供了与工业机器人相关的课程,但仅将其作为研究和运用工业与自动化领域的一个重要学科和研究方向,从而并没有培养学生在研究和运用工业机器人方面的能力,使得工业机器人的人才无法做到人岗相匹配。
首先,制造业的人才短缺。工业机器人由控制器、伺服驱动电机、减速器三大基础和核心零部件组成,成本比例超过工业机器人的7%,也是当前制约中国工业机器人行业发展的主要瓶颈。例如像减速机、控制器等新型产品,国内研究还与发达国家之间存在着较大的距离,相关领域的专业技术人才虽然是非常稀缺的。其次,系统中的集成技术存在人才短缺。一般而言,一个认为是合格的高校大学毕业生,要经历了工业设备的加工、制造等全过程中的深层次积累,才能够可以基本达到这种新型工业机器人的系统集成中所需要的技术水平,才能够有效地解决该类系统在整个应用中所遇到的问题。
3 工业机器人专业应用型人才培养策略
3.1 打造“双师型”教师队伍
工业机器人是我国高职高专院校中的主要专业之一,通过对专业应用型人才的培养,能够为我国工业自动化生产输送大量人才。此专业的实践操作性特别强,很多学校的教师在教学时只能够教授学生理论知识,学生的理论都学习得非常透彻,可是在毕业工作时却手忙脚乱,不知道该如何进行工业机器人的操作。因此,学校应该不断加强教师的实践操作能力,打造“双师型”教师队伍,这样才能够让教师在教学的过程中将自身的实践经验传授给学生,从而提高学生的实践操作能力[2]。
3.2 夯实学生工业机器人基础
虽然工业机器人这门专业是实践型课程,但是学校不能够忽视理论方面的教学。只有知道相关原理才能够具有更深层次的钻研,对自身的技术能够有更好地深造。很多学生在工作中对机器人的操作很熟悉,但是却不明白它工作的原理,出现问题时也不知如何进行修复,这样会在很大程度上限制了机器人工程师的专业程度。
3.3 建立校企合作教学模式
工业机器人的教学不能只停留在课堂的理论学习中,学校应该积极与相关企业展开校企合作,能够让学生在校期间就可以进入相关企业进行学习,学生还能够熟悉工业机器人的基本操作,将理论与实践相结合,让学生对工业机器人所实现的工艺更加了解。当学生在工作现场中实习时,一定会跟着一位经验丰富的机器人工程师实习,学生可以学习非常多的实践技术。当机器人在正常工作中发生故障时,学生可以观看机器人工程师是如何解决故障问题的,并且学着进行操作,对学生专业能力的增长具有重要意义[3]。
4 以库卡机器人为例进行教学分析
4.1 库卡机器人结构知识
从图1我们可以看到,库卡机器人大概由三个部分组成,从左到右分别是机器人控制柜、机械手以及编程器。除此之外,根据机器人的不同工艺还需要装在一些操作工具、传感器、传动装置、保护装置等。而机械手是由多个关节产生的,从下到上,每个关节分别称为一轴A1、二轴A2、三轴A3、四轴A4、五轴A5、六轴A6。而库卡机器人的六轴也被称为法兰,主要是用于连接各种工具的。图中③为编程器又被称为smartPAD,编程器在机器人编程、调试的过程中具有非常重要的作用,是实现人机交互的主要界面。

图1 库卡机器人
因此,学生若想提高自身实践能力,需要对编程器的各种功能进行了解。从图2中我们可以看到,当图中显示的①按钮被按下,能够将编辑器与机器人控制柜之间的连线拔出,这样操作可以防止线体发生急停,避免对整条生产线产生影响。图中的②是管理开关,能够调节机器人的模式,机器人模式包括手动模式和自动模式。图中③是急停键,能够起到制停的作用。图中⑤从上到下分别对机器人机械手的六个轴进行移动操作。图中⑥可以用来调节机器人的自动生产速度,而图中⑦可以调节机器人手动移动速度。
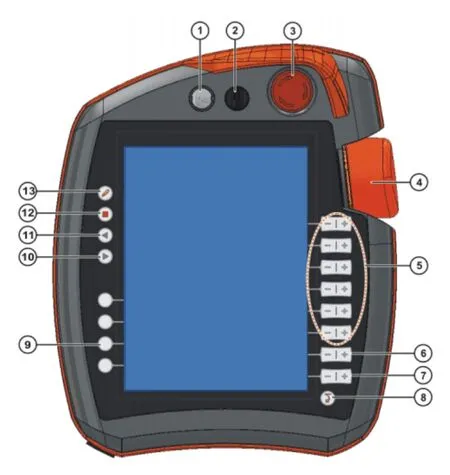
图2 smartPAD
4.2 库卡机器人信号知识
在机器人编程的过程中,信号知识的学习是十分重要的。机器人中的信号一共有四种,分别为E信号、A信号、F信号和M信号,其中E信号是指机器人接收PLC的信号,而A信号是机器人发出的信号,F信号叫做标识器,而M信号叫做状态寄存器。不同的信号代表不同的含义,我们以M信号为例,M信号在编程时一般需要写在程序MAKRO50中,M信号可以用E信号来进行表示,从而代表不同的含义。一般M1代表传感器可以检测到件,M2代表传感器没有检测到件,通过信号的书写能够让机器人判断自身抓手工具上是否有件,然后再去执行相应的命令。如果缺乏相应的信号判断,会发生碰撞或板件掉落的危险[4]。
4.3 库卡机器人实践教学
在进行机器人的学习中,实践教学非常重要。在学生进行操作机器人前,教师需要将注意事项对学生说明。机器人手动速度可以从0-100分成不同的档位,档位越高机器人移动的速度越快。学生刚开始进行操作时,不了解机器人速度如何,所以需要从低速开始移动,一般可以调节5-10的速度进行操作训练。现训练学生对各个轴的移动,对相关的方向进行确认,并不断加强练习,达到熟练的程度。当学生对机器人移动方向熟悉后,再进行相关工艺的练习,比如机器人抓手的开合、焊枪的开合等,循序渐进去完成实践训练[5-6]。
5 结语
综上所述,在企业自动化生产的过程中,工业机器人具有非常重要的作用。为了能够让工业机器人实现自动化生产,需要机器人调试工程师进行编程、调试,这样才能够实现工业机器人的各种功能。需要加强校企合作,促进人才培养,从而可以不断加强对专业人才的培养。
猜你喜欢
辽宁丝绸(2022年1期)2022-03-29
少先队活动(2021年2期)2021-03-29
汽车维修与保养(2021年8期)2021-02-16
扬子江诗刊(2020年3期)2020-11-17
学生天地(2020年17期)2020-08-25
四川工商学院学术新视野(2020年1期)2020-07-24
扬子江(2020年3期)2020-06-08
数学大王·低年级(2020年3期)2020-03-12
中学生数理化·中考版(2017年6期)2017-11-09
环球时报(2016-07-21)2016-07-21
