
基于交替迭代优化的同步调相机电气参数分步辨识方法
2022-01-14 05:08:08王继豪王安东孙福春郑竞宏曹志伟朱文兵
电测与仪表 2022年1期
王继豪,王安东,孙福春,郑竞宏,曹志伟,朱文兵
(1. 国网山东省电力公司电力科学研究院,济南 250003; 2. 清华大学 电机工程与应用电子技术系,北京 100084)
0 引 言
随着特高压直流输电技术的大规模应用,交直流混合电网“强直弱交”的问题日益凸显,必须配备大量动态无功补偿装置[1-3]。而300 Mvar大容量新型快速动态响应同步调相机的电气参数经过优化设计,在动态无功补偿方面具有明显优势[4]。同步调相机结构与同步电机相似,其暂态过程主要由其电气参数决定,但厂家提供的模型和参数往往与其实际动态特性存在差异[5],尤其是在大扰动时的动/暂态特性和非线性饱和特性。因此获得准确的同步调相机模型及电气参数是交直流混合电力系统分析、运行和控制的基础。
目前,国内外学者提出了多种辨识同步电机参数的算法[6-11],但实用化效果并不理想。同步电机待辨识参数多,同时辨识所有参数难度较大,易出现多值性和收敛性问题。若考虑同步电机的非线性饱和特性将进一步加剧多值性问题。
为此,有学者提出依据灵敏度大小逐步辨识参数。文献[12]提出利用灵敏度辨识大小筛选出对电力系统动态过程影响较大的主导参数作为待估计参数集,以降低待辨识参数数量;文献[13]进一步提出可以根据灵敏度的相位判断参数的可辨识性;文献[14]在灵敏度分析的基础上,提出通过网格初始化搜索算法解决初值设置不合理导致的参数辨识多值性问题;文献[15]通过分析不同扰动下同步发电机参数的灵敏度特征,制定了发电机参数分步辨识策略,提高瞬态/超瞬态参数辨识的准确性;文献[16]利用短路实验引起扰动,基于灵敏度分析确定主导参数进行分布辨识;文献[17]利用甩负荷实验,基于轨迹灵敏度确定合适的加权区间和权重系数,但没有考虑饱和效应;文献[18]利用励磁阶跃扰动,在频域内采用分步辨识策略辨识发电机参数,也没有考虑饱和效应。以上文献均从理论角度阐述了基于灵敏度特征辨识同步电机参数的可行性,但存在以下问题:大部分文献推荐采用短路大扰动实验以提高参数辨识精度,但调相机位于换流站,难以开展此类大扰动实验,有必要探究基于小扰动的参数辨识方法;不同扰动类型下的同步电机工况不同,基于单次扰动实验数据辨识出的参数往往难以适用于其他扰动工况;相当一部分文献没有考虑同步电机饱和特性,而饱和特性恰恰是影响调相机动态、暂态/次暂态等性能的关键因素之一。
进一步分析,同步电机参数之间相互耦合,部分参数作用效果相反[9]。若同时辨识作用效果相反的参数,即使参数灵敏度大,也可能导致待辨识参数无法收敛至最优值。为此,可以将参数辨识看作优化问题,依据作用效果将待辨识参数分成几组分步求解。而交替迭代乘子法(ADMM)作为一种求解此类优化问题的分散式方法,具有良好的收敛性、鲁棒性,在电力系统经济调度、微电网群调度等方面取得了良好的应用效果[19-20]。
针对以上问题,设计了适用于同步调相机的小扰动实验方案。基于参数灵敏度分析法和ADMM法,采用三组小扰动实验数据联合辨识、稳态参数和暂态参数分步辨识的策略,完成现场实测验证。
1 同步调相机模型及坐标变换
1.1 同步调相机数学模型
同步调相机内部结构及工作原理均与同步发电机类似[21],主要区别在于同步调相机没有原动力。因此,同步调相机的数学模型可以借鉴同步发电机的6阶实用模型,其中电气部分采用4阶模型[22],即:
(1)

量测方程为:
(2)
式中id和iq分别为定子直轴和交轴电流分量。

E′q0=KGE′q=(1+a(E′q)b-1)E′q=E′q+a(E′q)b
(3)

1.2 数据预处理
数据预处理分为: 数据滤波、计算有效值、标幺化、dq坐标变换。数据滤波通过高通滤波滤除功角、电压、电流等测量数据中的高频噪声,减小对辨识效果的影响;dq坐标变换若按照通用的dq0坐标变换方法,需要知道调相机启动瞬间转子直轴与a相轴线初始角度a0或者功率因数角φ,但是初始角度a0往往不易准确测量,功角曲线的测量受转速脉冲精度的影响会有相当的误差。
针对同步调相机几乎不发有功功率的特点,在功率因数角φ足够小的情况下,考虑利用同步调相机定子侧电压Ua和线电流Ia的有效值代替Id和Uq,在对辨识结果影响不大的前提下,进一步简化计算。
基于Simulink仿真调相机机端电压扰动工况,仿真发现同步调相机的功角小于4°,实际及简化处理得到的Id和Uq曲线基本重合,如图1所示。基于以上两组数据分别进行辨识调相机参数,辨识结果在误差上基本没有区别,进一步验证了这种数据处理的可行性。下文均采用这种数据处理方式。

图1 实际及简化处后的Id和Uq曲线Fig.1 Actual and simplified curves of Id and Uq
2 同步调相机参数轨迹灵敏度分析
文献[10]直接使用Simulink中的同步电机模块进行灵敏度分析,所用模型与PSASP中的电机模型不兼容,而其所使用的辨识模型又与灵敏度分析所用模型不同,这导致了辨识过程中对参数的调整方向与灵敏度分析的规律存在区别,所制定的辨识策略在实际应用中出现收敛效率低、易陷入局部最优的问题。同时,同步调相机与传统同步电机在参数范围、扰动模式上(例如甩负荷扰动)均有较大区别,有必要依据辨识所用模型重新计算参数灵敏度。
参数对输出的轨迹灵敏度定义如下:
(4)
式中y为系统输出Id或Uq;θ为系统中的参数;Δθ为参数的相对改变量;t为时间。


图2 甩负荷扰动下各参数轨迹灵敏度Fig.2 Trajectory sensitivity of parameters in load rejection disturbance

图3 励磁阶跃扰动下各参数轨迹灵敏度Fig.3 Trajectory sensitivity of parameters in excitation step disturbance

图4 机端电压扰动下各参数轨迹灵敏度Fig.4 Trajectory sensitivity of parameters in terminal voltage disturbance
分析图2~图4,可知各参数的灵敏度规律为:
(1)xd的灵敏度在三种扰动的整个过程中均比较大,从数值大小排序来看,阶跃扰动的灵敏度(0.1~0.5)>机端电压扰动的灵敏度(0.1~0.2)& 甩负荷扰动的灵敏度(0.1~0.2);

(4)xd″ 只在甩负荷后的瞬间灵敏度较大,在其余均非常小,在其他两种扰动中的整个动态过程中灵敏度也非常小;
(5)Td0″ 在三种扰动的整个动态过程中灵敏度均非常小。
3 同步调相机辨识算法及策略
3.1 辨识算法
采用修正阻尼最小二乘法(Modified Damped Square, MDLS)辨识同步调相机参数。以实测实验数据与拟合数据的误差和为目标函数,即:
(5)
式中w1、w2、w3分别为甩负荷、励磁阶跃和机端电压扰动对目标函数贡献的比例系数;Uq、Id1、Id2为三种扰动下的拟合数据;Uq0、Id10、Id20为三种扰动下的实测数据;N1、N2、N3为三种扰动下的数据长度。
3.2 ADMM基本原理
参数辨识类问题可以看作优化问题,而ADMM法是一种求解优化问题的计算框架,适用于求解分布式凸优化问题,能够降低问题规模和难度[24-25]。ADMM要解决的优化问题一般表述为:
(6)
式中x、z是优化变量;f(x)和g(z)是对应目标函数。
该类优化问题的求解步骤如下:
(1)求解与x相关的最小化问题,更新变量x;
(2)求解与z相关的最小化问题,更新变量z;
(3)更新迭代优化中需要的对偶变量,然后重复以上步骤。
可以看出,ADMM的核心思想是将规模大、难度高的全局问题分解为规模小、求解相对容易的局部子问题,通过交叉迭代优化协调子问题的解,最终得到大的全局问题的解,可以应用于待辨识参数较多的参数辨识问题。
3.3 分步联合辨识策略
文献[16-18]在辨识参数过程中只使用单扰动实验数据,但文中研究发现,单扰动数据辨识出的参数可能并不能复现其他扰动类型。文献[10]虽然采用多种扰动数据辨识参数,但每一步骤只使用单一扰动辨识单个参数,辨识过程复杂。考虑到稳态参数影响整个扰动过程,暂态/次暂态参数主要影响扰动瞬间的动态过程。基于上面的轨迹灵敏度分析,借鉴ADMM交叉迭代的思想,提出了一套实用化的分步联合辨识策略,采用三组扰动实验数据同时辨识参数,稳态、暂态/次暂态参数分步辨识,通过交替迭代的方式提高参数辨识准确性。
图5给出了参数辨识流程图,具体步骤如下:
(1)预辨识所有参数:为保证辨识的效果,需要给分步辨识设置一个合适的辨识初值,而设计值并不一定合适。励磁阶跃和机端电压扰动的作用效果主要体现在机端电压上,二者作用效果接近,且励磁阶跃轨迹灵敏度略大于机端电压扰动下的参数轨迹灵敏度。故第一步选择以甩负荷和励磁阶跃扰动的整个扰动数据为主,预辨识所有参数,并将辨识结果作为正式开始辨识的参数初值,设置w1:w2:w3=0.5:0.4:0.1;


(4)整体修正辨识参数:考虑到稳态和暂态类参数并不是完全割裂的,其相互间存在很强的相互影响,因此增加一步辨识,以融合所有参数的相互影响,该过程主要起一个整体修正作用。励磁阶跃扰动和机端电压扰动的参数灵敏度规律接近,且励磁阶跃扰动的参数灵敏度更大。因此,可选择甩负荷扰动数据和励磁阶跃扰动的整个扰动数据为主辨识所有参数,设置w1:w2:w3=0.5:0.4:0.1;
(5)步骤(2)~步骤(4)交替迭代2~5次;
(6)微调:完成迭代后,在0.9倍~1.1倍参数范围内整体微调再次辨识,以保证所有参数均在合理范围内,设置w1:w2:w3=0.4:0.1:0.5。
在参数轨迹灵敏度分析的基础上,三种扰动的具体比例关系可在多次调整后根据辨识效果最终确定。

图5 参数辨识流程图Fig.5 Flow chart of parameter identification
4 参数辨识验证
4.1 实验测试方案

扰动实验测试方案包括:
(1)励磁阶跃扰动:维持同步调相机无功出力不变,改变励磁调节器给定值,在励磁回路中施加一个使机端电压波动大于2%的扰动量;
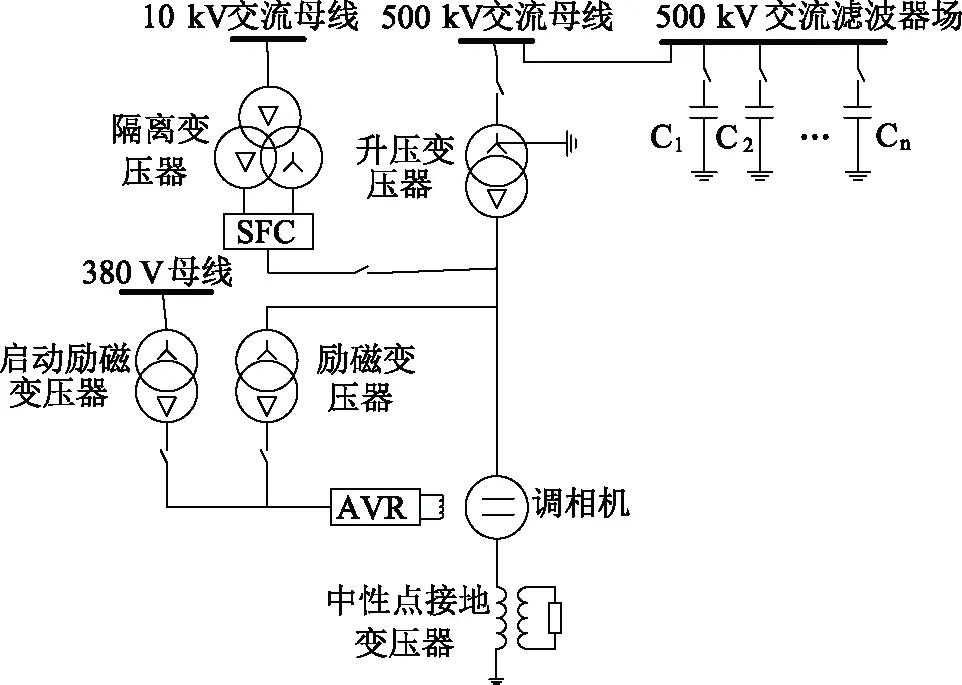
图6 系统简化电路图Fig.6 Simplified system circuit diagram
(2)机端电压扰动:由于同步调相机通过升压变压器直接连接在换流站交流母线上,紧靠换流阀,进行短路等大扰动实验的安全风险大,故采用投切电容器的方式造成机端电压扰动。维持同步调相机无功出力不变,在机端依次投切255 Mvar、210 Mvar、210 Mvar三组电容器组,施加一个使机端电压波动大于2%的扰动量;
(3)甩负荷扰动实验:令同步调相机进相-150 Mvar运行,突然切机甩负荷产生扰动。
4.2 参数辨识验证
选取50 Mvar+3%励磁阶跃、投一组210 Mvar电容器组、-150 Mvar甩负荷三组扰动实验数据,依据图5所示辨识流程依次辨识同步调相机参数。
(1)获得辨识起点;预辨识结果见表1和图7。

表1 参数预辨识结果Tab.1 Pre-identification result of all parameters

图7 三种扰动下的拟合曲线(预辨识)Fig.7 Fitting curves under three disturbances (Pre-identification)
(2)辨识xd、a、b;

(4)整体修正辨识参数;
(5)迭代步骤(2)~步骤(4)约2~5次;
(6)微调所有参数获得最终结果。
辨识结果见表2和图8。

表2 微调后参数辨识结果Tab.2 Parameter adjustment result after fine adjustment

图8 三种扰动下的拟合曲线(微调后)Fig.8 Fitting curves under three disturbances (arter fine adjustment)
分析图8可以看出,拟合曲线与实测曲线十分接近,说明所提的分步联合辨识策略效果良好。
4.3 多种参数辨识策略比较
为了说明上述同步调相机参数分步联合辨识策略的有效性,分别利用厂家提供的参数设计值、分步联合辨识策略辨识出的参数、单次扰动辨识出的参数、利用三组扰动数据一次性辨识出的参数拟合实测数据,计算拟合曲线与实测曲线的均方根误差。结果见表3。

表3 辨识结果对多种扰动的误差分析Tab.3 Error analysis of identification result for several disturbances
分析表3可知,采用单次扰动辨识出的参数不能保证对其他两类扰动的拟合效果(2组、3组、4组);利用三种扰动数据一次辨识出所有参数的效果略有所改善(5组),但有提升空间;采用分布联合辨识策略辨识出的参数能准确复现所有扰动实测结果,获得比设计值和单扰动辨识方法、单次联合辨识方法更好的效果;分步联合辨识策略由于兼顾了甩负荷、励磁阶跃和机端电压扰动的动态特性,所得结果具有更小的综合误差,其结果具有更好的适用性。
5 结束语
提出了一种适用于同步调相机的电气参数辨识方法,所做的工作主要有:
(1)建立了考虑饱和特性的同步调相机数学模型。通过高通滤波对数据进行预处理,针对调相机不发有功功率的特点,确定了利用Ua和Ia代替Id和Uq的数据简化处理方式;
(2)针对换流站实际运行工况,设计了适用于现场操作的同步调相机小扰动实验方案;
(3)通过参数轨迹灵敏度,分析确定辨识参数的最佳扰动组合。将ADMM的思想引入参数辨识中,提出了实用化的调相机参数分步联合辨识方法,并将其成功地应用到伊克昭-沂南直流送电工程中。
研究表明,三组实验联合辨识优于单扰动辨识,分步辨识优于一次性辨识所有参数。其很好地解决了基于单次扰动实验辨识出的参数无法复现其他工况实验数据的问题,提高了参数辨识结果的适用性和准确性。
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
大电机技术(2021年5期)2021-11-04 08:58:28
电子制作(2018年14期)2018-08-21 01:38:28
天津教育·下(2018年9期)2018-07-13 08:25:47
水电站机电技术(2017年9期)2017-09-26 03:34:52
电子测试(2017年23期)2017-04-04 05:07:02
微特电机(2016年3期)2016-11-29 09:43:45
科技创新导报(2015年32期)2015-04-12 09:22:46
江苏通信(2014年4期)2014-04-14 06:18:42
电力工程技术(2014年5期)2014-03-20 14:19:36
