基于电机动态模型的电动汽车高速斜齿轮动载荷计算及寿命预测
2022-01-13 01:36尹燕莉
重庆理工大学学报(自然科学) 2021年12期
郭 都,陈 星,尹燕莉,韩 森
(1重庆交通大学 机电与车辆工程学院,重庆 400074;2.重庆文理学院,重庆 402160)
能源与环境问题日益严峻,新能源汽车备受关注,电动汽车凭借其零排放、低噪声、电力来源广泛等优点成为各国的研究重点[1]。电动汽车与燃油汽车在车身结构上存在很多相似点,但动力传动系统结构形式和工作环境方面存在显著差异。电动汽车传动系统省去了变矩器、离合器等扭转减振原件,系统表现为一个欠阻尼系统;同时,传动系统采用多级减速和少挡位变速的结构形式,动力传递路径更短,循环次数大幅增加。电动汽车传动系统呈现出来的这些新特征带来了新的理论和技术问题,其中传动系统寿命预测及系统可靠性就是制约性能进一步提高的瓶颈。
作为电动汽车动力源的驱动电机与传统内燃机相比,电机转矩动态响应快100倍,转速高2~3倍,而且存在高频波动和强冲击[2]。电动汽车行驶过程中,齿轮传动系统受到来自电机的转矩和行驶工况的影响,因而齿轮实际承受的载荷具有强烈的时变性和随机性;同时在啮合过程中往往会产生一定的冲击载荷,因此齿轮的受力情况复杂,这些力的作用显著影响齿轮动态啮合过程,进而导致点蚀、断裂等疲劳失效现象。目前相关零件疲劳寿命预测方面已有许多研究[3-5],但是采用电机动态模型计算电动汽车齿轮传动系统在循环工况下的动态载荷,开展基于疲劳损伤理论寿命预测的研究还很少。因此,考虑电机的高速、高频动态特性,基于瞬态道路工况获取电动汽车变速器齿轮副的疲劳载荷谱,预测其动态疲劳寿命,对我国电动汽车传动系统的设计创新与技术升级具有重要意义。
对于电动汽车变速器齿轮载荷历程的获取,最理想的方法是实车测试,传动系统实际工况载荷的测试是任何数值模拟结果都无法替代的,可以较全面地反映变速器实际运行情况,但是该方法对测试系统的要求比较高,而且周期长、成本高。其次,实车测试法获取的电动汽车传动系统随机载荷数据,虽然能再现传动系统实际工况,但数据量过大,实用性不强。目前,主要通过计算机模拟仿真的方法获取变速器齿轮的载荷历程。本文以某定传动比电动汽车高速斜齿轮为研究对象,建立车用永磁同步电机的控制模型,基于瞬时道路工况对模型进行仿真计算,并对仿真结果进行实车验证;以仿真得到的电机动态转矩作为高速级齿轮对的驱动转矩,将斜齿轮转化为当量直齿轮计算其循环工况下齿面接触应力谱;并采用雨流计数法进行载荷循环计数,获取齿轮接触应力幅值-频次关系,最后运用修正的P-S-N曲线及疲劳累积损伤理论对变速器齿轮接触疲劳寿命进行预测。
1 传动系统结构及变速器受载分析
电机起动转矩很大,可实现低速恒扭矩,高速恒功率的工作模式,且易实现无极调速[6]。为提高传动系统效率,北汽EV系列、宝马i3等电动乘用车仍采用结构简单,制造成本低的定传动比变速器,系统基本结构如图1所示。

图1 定传动比系统基本结构
汽车在行驶过程中受到各种阻碍行驶的力,这些阻力称为汽车行驶阻力,必须有外力作用于汽车并与行驶阻力相平衡才能使汽车运动,这种外力称为汽车驱动力。汽车行驶阻力和驱动力可以看作是作用在汽车上的作用力与反作用力。因此,以驱动电机输出的动态转矩可计算出电动汽车传动系统齿轮载荷,而电机输出转矩又与汽车行驶阻力密切相关,所以首先对汽车行驶过程中的驱动力与行驶阻力进行研究。
汽车行驶过程中,车轮受到驱动电机传递的力矩,力矩对地面产生力的作用,地面反过来对车轮产生驱动力Ft,驱动力与变速箱输入扭矩关系式如下:
(1)
式中:Ttq表示变速箱输入转矩;ig表示变速器的传动比;i0表示主减速器的传动比;ηT表示传动系的机械效率;r表示车轮半径。
汽车行驶过程中受到的阻力分为4个部分,分别是滚动阻力、空气阻力、加速阻力以及坡道阻力,这些阻力构成了汽车的行驶阻力[7],如下式:
∑F=Ff+Fw+Fi+Fj
(2)
式中:∑F表示行驶阻力之和;Ff表示滚动阻力;Fw表示空气阻力;Fi表示坡道阻力;Fj表示加速阻力。
综上所述,可得汽车驱动力Ft如下所示:
Ft=∑F
(3)
根据汽车行驶方程式可得电动汽车实际行驶工况下电机转子上的负载转矩TL计算公式如下:
(4)
2 车用电机模型及仿真
永磁同步电机(PMSM)具有体积小、质量轻、效率高、电磁转矩大、过载能力强等优点,常用作电动汽车的牵引电机。永磁同步电机驱动系统普遍采用矢量控制,矢量控制具有电机效率高、转矩稳定、调速范围宽、动态性能好等优点[8]。本文所采用的车用永磁同步电机参数如表1所示。

表1 车用永磁同步电机参数
2.1 永磁同步电机的矢量控制模型
在理想情况下永磁同步电机基于转子旋转两相坐标系d-q的数学模型是目前在矢量控制方法中应用最为广泛的模型[9]。永磁同步电机d-q轴电压和转矩方程如式(5)~(7)所示。
ud=Rsid+pψd-ωeψq
(5)
uq=Rsiq+pψq+ωeψd
(6)
(7)
式中:ud、uq分别表示d轴和q轴的定子电压;id、iq分别表示d轴和q轴的定子电流;ψd、ψq分别表示d轴和q轴的定子磁链;Rs表示定子电阻;p表示微分算子;ωe表示电机角速度;Ld、Lq分别表示d轴和q轴的电感分量;ψf表示永磁体磁链;pn表示电机极对数。
电机的机械运动方程为:
(8)
式中:ωm表示电机机械角速度;J表示电机转子及负载转动惯量;Te表示电机的电磁转矩;TL表示电机负载转矩;B表示阻尼系数。
矢量控制算法建立在永磁同步电机的数学模型上,由永磁同步电机在旋转d-q轴坐标系的数学模型可知,对永磁同步电机的控制就是对id、iq电流分量分别进行控制。因为永磁体的磁通保持不变,所以采用id=0的控制策略可以使控制变得非常简单。根据式(7),通过控制iq就可以控制转矩Te。
永磁同步电机矢量控制系统主要包括:电流检测模块、速度检测模块、坐标变换、电流PI调节模块、速度PI调节模块和SVPWM模块。图2为采用id=0控制方法的矢量控制框图。

图2 id=0矢量控制框图
2.2 模型仿真
基于永磁同步电机的数学模型和控制原理,利用Matlab/Simulink搭建在循环工况下的仿真模型。Simulink工具箱中已封装永磁同步电机模块,设置相关参数后即可直接使用。其他模块也可以通过Simulink库文件进行查找,并通过修改相关参数进行整个系统模型的搭建。仿真工况选择美国环境保护署(EPA)制定的城市道路循环工况(UDDS)。永磁同步电机的负载转矩根据式(4)计算。图3为循环工况电机动态输出转矩曲线及其局部放大图,Te表示电机的电磁转矩,TL表示电机输出端负载转矩。可以看出电机实际输出转矩存在高频波动和强冲击。

图3 循环工况下电机的电磁转矩
2.3 实验验证
为验证电机模型相关参数设置的合理性以及仿真得到的电机转矩对实际车辆驱动电机输出转矩模拟的准确性,以北京汽车集团有限公司生产的2016款EV160纯电动轿车(关闭能量回收模式)在水泥路上进行实验,实验用车及试验路面如图4所示。

图4 试验电动汽车及实验路面
试验工具包括:广成科技有限公司生产的USBCAN-OBD分析仪和ECANTools软件。实验原理是:将USBCAN-OBD设备的OBD端口与汽车OBD接口连接起来,另一端USB接口与计算机连接,USBCAN-OBD可以通过ECANTools软件读取汽车OBD数据,解析协议中规定的汽车传感器数据包括:电机转速、电机扭矩、累计里程、电压、定子温度、冷却水温度、IGBT温度等,这些数据的数值变化可以实时保存在计算机中。由于实验条件有限,驾驶试验车辆行驶1 000 s,通过ECANTools软件获取试验车辆的实测电机转速和转矩。以实测电机转速如图5所示,作为2.1节电机模型的控制转速得到电机的仿真转矩,图6为实测电机转矩和仿真转矩对比。实测数据与仿真结果误差值在3%之内,验证了该仿真结果的可靠性。

图5 实测电机转速曲线

图6 电机输出转矩
3 载荷历程计算及循环计数
3.1 齿轮接触应力谱
根据实际经验可知变速箱齿轮经常发生接触疲劳。表2为所研究电动汽车高速级齿轮副基本参数。齿轮啮合过程中,斜齿轮齿面最大接触应力σH发生在小齿轮上,接触疲劳危险位置通常首先出现在节线附近的单齿啮合区,故取节点处作为轮齿接触疲劳危险位置[10]。基于Hertz接触理论,以最大接触应力作为斜齿圆柱齿轮对齿面接触应力基本值,接触应力计算公式如下:

表2 变速器高速斜齿轮基本参数
(9)
式中:σH表示接触应力;T表示小齿轮扭矩;B表示齿宽;d1表示小齿轮分度圆直径;αn表示法向压力角;β表示螺旋角;E1、E2分别表示2个齿轮的弹性模量;ν1、ν2分别是2个齿轮的泊松比;2个齿廓接触点的曲率半径R1、R2根据下式计算:
(10)
式中:rb1、rb2分别2个齿轮的基圆半径;α表示2个齿轮的啮合角。
将仿真得到的驱动电机动态转矩代入式(9),计算得到基于准静态法计算循环工况下电动汽车变速器主动齿轮接触应力谱,如图7所示。

图7 齿轮接触应力谱
3.2 齿轮接触应力谱循环计数
循环计数法实质是从疲劳损伤的角度研究载荷基本损伤单元出现的次数,将载荷的计数过程和材料的疲劳特性建立联系。目前,雨流计数法是国内外学者普遍认为符合疲劳损伤规律的一种随机载荷循环计数方法,在工程实际中得到广泛应用。雨流计数过程一般通过计算机程序实现,可分为数据压缩和循环数提取2个步骤。
根据雨流计数法原理,该算法主要针对连续载荷历程进行载荷循环计数,而齿轮运转一周单个轮齿所受应力并不连续。因此,通过数据处理对齿轮接触应力谱进行提取和重组。齿轮转动一周的总时长是转速的函数,同时也是单个轮齿啮合周期和齿数的函数,基于这个关系可以对齿轮载荷数据进行提取和重组,使单个轮齿的应力-时间曲线变成连续的载荷历程,从而采用雨流计数法进行循环计数。最后得到主动齿轮接触应力幅值均值-频次关系,如图8所示。对计数结果进行统计分析和K-S假设检验,可知载荷均值服从正态分布,载荷幅值服从威布尔分布。齿轮接触应力均值分布的均值和标准差分别是508 MPa和82.3 MPa。
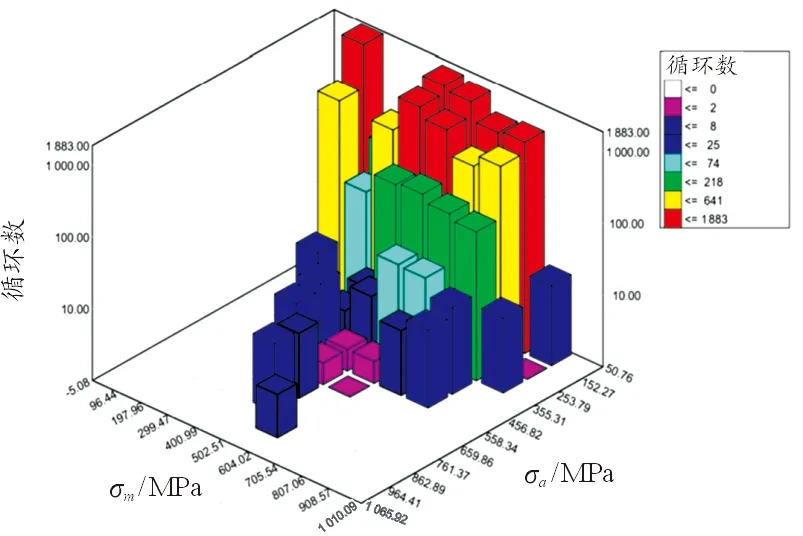
图8 齿轮接触应力幅值均值-频次
4 疲劳寿命计算
本文研究的齿轮所承受的循环应力水平较低,处于低应力高频疲劳状态,属于高周疲劳。名义应力法常用于预测高周疲劳下无裂纹结构的裂纹形成寿命。名义应力法主要以材料或结构零部件的S-N曲线为基础,参考结构和材料试件的疲劳危险部位的应力集中系数和名义应力,按疲劳累积损伤理论,计算疲劳寿命[11]。本文采用Miner线性累计损伤理论计算齿轮的接触疲劳损伤,从而得到疲劳寿命。
4.1 齿轮疲劳性能曲线
由齿轮材料的S-N曲线得到目标齿轮的S-N曲线,需按式(11)进行修正。
S0=σ0εβCL/KT
(11)
式中:S0表示结构S-N曲线应力;σ0表示结构材料的S-N曲线应力;KT表示应力集中系数;ε表示尺寸系数;β表示表面加工系数;CL为加载方式。
本文根据经验,对《机械工程材料性能数据手册》中目标齿轮材料的P-S-N曲线进行修正,获取存活率P为99%的目标齿轮S-N曲线。选取齿轮材料的有效应力集中系数为1.0,尺寸系数为0.86,表面加工系数为0.90,取CL=0.85。此外,由于电机驱动系统中存在着很多低于疲劳极限的载荷频次,这些载荷也将对齿轮造成累积损伤,所以选用EM法则对齿轮P-S-N曲线低于疲劳极限值部分进行修正,即低于疲劳极限部分取与高于疲劳极限部分相同的斜率[12]。从而得到在任意应力幅值σa条件下,达到疲劳破坏的应力循环次数Ni,如图9所示。

图9 修正的齿轮P-S-N对数曲线
研究表明,结构应力幅值、均值和循环次数是对结构疲劳损伤影响最大的因素。如图8所示,在雨流计数法得到的齿轮接触应力幅值均值-频次关系中,其平均应力并不全为零。因此,需要按照等效损伤原则将非零平均应力的应力循环转换为零平均应力的应力循环。通常可以采用Goodman疲劳经验公式对其进行转换,如式(12)所示。图10表示零平均应力时齿轮接触应力幅值-频次关系。

图10 应力幅值-频次
(12)
式中:Sae、Sme表示雨流计数法统计得到的工作循环应力幅值和平均应力;Sb表示构件材料的强度极限;Se表示等效对称循环应力。
4.2 接触疲劳寿命计算
Miner线性累计损伤法则认为构件在给定应力水平的反复作用下,损伤与应力循环成线性累积关系,当损伤累积到某一临界值时,就产生破坏[13],即:
(13)
式中:ni表示对称循环应力水平作用下的工作循环数;Ni表示相应的破坏寿命(循环数);D表示典型载荷周期内的总损伤。
根据Miner累积疲劳损伤理论,构件的疲劳寿命为T=1/D,即典型载荷周期执行T次,构件将发生破坏。
基于修正的P-S-N曲线,分别计算不同应力幅值下的疲劳损伤,根据Miner线性累积疲劳损伤理论计算一个循环行驶工况(UDDS)下变速器主动高速斜齿轮的损伤D=3.22×10-5,如图11所示。根据疲劳寿命公式,变速器齿轮接触疲劳寿命为T=3.1×104,即经过3.1×104次UDDS循环,齿轮达到接触疲劳破坏,此时纯电动汽车里程寿命为370 000 km。

图11 循环工况下齿轮接触疲劳累积损伤
5 结论
1)基于车用永磁同步电机的动态控制模型和循环行驶工况,采用计算机模拟仿真,提出了一种计算循环行驶工况下电动汽车变速器载荷历程的方法。
2)对于齿轮载荷循环计数,通过对齿轮接触应力谱首先进行数据提取和重组,使单个轮齿载荷变成连续载荷历程,其次采用雨流计数法进行载荷循环计数,获取循环工况下齿轮轮齿接触应力幅值均值-频次关系。
3)基于修正的P-S-N曲线,应用Miner线性累积疲劳损伤理论计算了变速器高速斜齿轮接触疲劳寿命,为电动汽车传动系统齿轮的动态疲劳寿命预测提供理论依据和方法。
猜你喜欢
中国造纸(2022年8期)2022-11-24
一重技术(2021年5期)2022-01-18
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
测控技术(2018年5期)2018-12-09
电子制作(2018年10期)2018-08-04
光学精密工程(2016年3期)2016-11-07
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28