
机械臂数字孪生模型概念域设计评价方法研究
2022-01-10 08:26:56谢奕浩王建生谢啊奋康献民余宏志陈尧
机械 2021年12期
谢奕浩,王建生,谢啊奋,康献民,余宏志,陈尧
机械臂数字孪生模型概念域设计评价方法研究
谢奕浩,王建生,谢啊奋,康献民,余宏志,陈尧
(五邑大学 智能制造学部,广东 江门 529020)
机械臂数字孪生模型的评价过程中首要环节是对机械臂概念设计方案进行评价,评价方法的优劣性直接影响整个机械臂的设计与制造。提出一种基于价值函数的层次分析法,在功能分析和形态学矩阵的基础上构建了混合的方案评价模型。在原有的层次分析法过程中,对两个因素之间的比较采取指标价值函数的方式,提高了层次分析法的客观性。研究机械臂的数字孪生概念域模型,解决了机械臂设计方案的选择与优化的问题;结合专家知识,使选择的方案具有专家水平,提高了其评价的客观性;基于价值函数的层次分析法,开发了机械臂数字孪生概念域评价软件。
数字孪生;概念模型;形态学矩阵;层次分析法
数字孪生理论和方法的研究日益受到重视,但在数字孪生概念域设计过程中选择合适的方法对概念方案的求解这方面的研究较少。过去的机械产品概念设计过程一般采用原理综合方法,如形态学矩阵和键合图法,进行概念设计方案求解,但这些组合方法的方案数太多,进一步的评价和优化困难。
机械臂数字孪生模型的概念域评价方法研究,是对机械臂概念域的设计方案进行评价。机械臂的设计根据企业要求,进行需求的表达和抽象化;对总功能进行分解,不同的分功能适配不同的机械结构;分功能与机械结构载体的组合可以得到一个功能与机械结构的矩阵,为机械臂概念域的形态学矩阵。根据形态学矩阵表,筛选出符合企业需求与实际情况的方案;对方案采用基于价值函数的层次分析方法进行评价,是机械臂概念域评价方法的研究过程。
1 机械臂的概念设计
1.1 机械臂数字孪生模型
建模“数字化”是对物理世界数字化的过程,这个过程需要将物理对象表达为计算机和网络所能识别的数字模型。建模的目的是将对物理世界或问题的理解进行简化和模型化,而数字孪生的目的或本质是通过数字化和模型化,用信息换能量,以更少的能量消除各种物理实体、特别是复杂系统的不确定性。所以建立物理实体的数字化模型或信息建模技术是创建数字孪生、实现数字孪生的源头和核心技术,也是“数字化”阶段的核心。
1.2 机械臂的概念设计过程
在机械臂的概念设计过程中,从分析用户需求到生成概念设计方案,这是一个从抽象到具体的推理和决策过程,是逐渐完善,演化和扩展的过程。在当前的概念设计研究中,对概念设计过程的理解多种多样,且由于概念设计方法的不同,对概念设计过程的划分也不同,机械臂概念设计方案过程如图1所示。
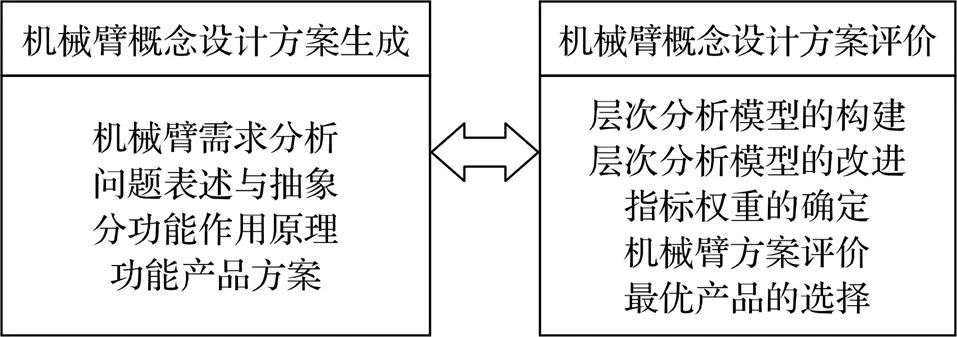
图1 机械臂概念设计方案
图1给出了产品设计过程的一个模型,基本上反映了对概念设计过程的认识情况。研究中将概念设计归结为两大问题:设计方案生成和设计方案评价。其中,设计方案生成包括建立设计过程模型和设计方案生成推理;设计方案评价包括对概念设计方案的评价和决策。
2 形态学矩阵构建
形态综合法,又称为形态学矩阵法,它由美国Zwicky教授提出[1],是一种系统搜索的方法。它系统地对多种因素可能的排列组合进行搜寻,找出一切可能存在的方案。机械产品概念设计形态综合法的重点是将机械系统进行功能分解,寻求每一分功能的可能解法,然后通过形态学矩阵对它们的各种组合加以考虑,并得出各种可能的方案,最后通过评价和决策[2],确定最佳概念设计方案。
由此看来,概念设计是一个实现功能的、可能存在的各种方案并最终确定最优方案的过程。技术系统总功能的实现取決于分功能的实现,因此必须对基本原理方案进行组合才能得到实现总功能的设计方案[3]。
形态学矩阵是一种基本原理方案组合的有效方法[4],它将系统的各部分及其原理方案以矩阵的形式列出,并用组合方法获得多种解决方案[5]。在原理方案形态学矩阵的基础上,采用基于改进层次分析算法进行概念设计方案的求解,并对方案进行评价,机械臂概念域设计过程如图2所示。

图2 机械臂概念域设计过程
2.1 机械臂问题的描述与设计要求
不同行业的机器人打磨抛光形式不同,对于模具以及汽车行业,主要是机器人手持打磨头对工件进行打磨,而卫浴产品主要是机械手夹持工件靠近砂带来打磨。
根据实地考察和资料收集,发现机器人代替人工进行打磨的方式有以下缺点[6]:
(1)成本高。因为抛光机器人有六个关节,整机刚性较差,因此小载荷机器人的刚度达不到加工要求,必须采用价格昂贵的大载荷机械手。而且卫浴打磨主要是机器人夹持工件配合砂带,砂带更换的频率与成本较高。
(2)编程麻烦。机器人打磨的编程主要依靠示教的方式来完成,但这种方式只适用于外形简单的工件,对于外形复杂的工件,很多拐角以及细小的曲面无法打磨到位。由于示教精度的原因,打磨出来的产品不对称,而且如果工件外形发生变化,需要重新进行编程,这加大了编程难度和工作量。
(3)效率低。由于卫浴产品表面的铸造层坚硬且加工余量多,使用机器人手持工件配合砂带进行打磨的方式效率较低。
因此,开发一项简单实用、经济成本低、效率高的剥皮加工装备具有广阔的前景和社会经济价值。
根据企业要求与实际工作需求,对夹持机器人提出如下设计要求:机械臂整机尺寸的长宽高分别不超过400 mm、400 mm、500 mm;工作空间(,,)在(±300, ±300, ±700);成本控制在10万以内;工作时有效负载为4 kg;机械臂的起动和制动平稳,工作效率高,产生的噪声低。
2.2 机械臂功能分析
机械臂的总功能是抓取和放下物体,它主要由驱动、传动、夹持和制动这四个分功能来实现,其功能结构如图3所示。
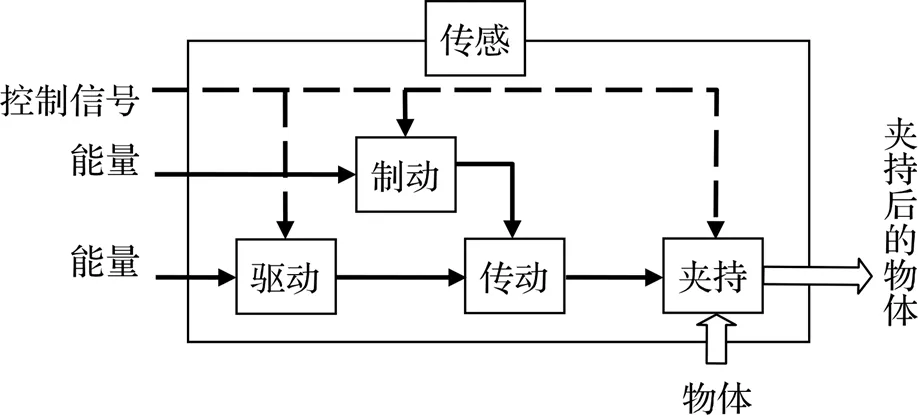
图3 机械臂功能结构简图
与夹持机器人机构中各分功能对应[7],将夹持机构分成以下几个部分:驱动装置、传动装置、夹持装置和制动装置[8]。机械臂实现各分功能的功能载体及特点如表1所示。
2.3 形态学矩阵
机械臂的主要功能是抓取和放下物体,机械臂的形态学矩阵如表2所示。
3 机械臂概念方案评价模型
层次分析法可以将半定性、半定量问题转化为定量问题,使思维过程层次化。通过逐层比较多种关联因素来为分析、决策、预测或控制事物的发展提供定量依据[9]。
3.1 层次结构图
把机械臂的形态学矩阵转换成一个树状结构的层次结构图,如图4所示。最高层为目标层(O)评价出一种机械臂的概念设计方案;中间层为一级准则层(C)、二级准则层(X)和三级准则层(Z)。
机械臂概念设计指标可以看成为树状结构的层次结构图。第一层是机械臂的概念设计指标(O),是概念设计的最高目标层;第二层是驱动装置(C1)、传动装置(C2)、制动装置(C3)及夹持装置(C4),是概念设计指标的一级准则层;第三层直流电动机(X1)、步进电机(X2)等是二级准则层;第四层传动部分(X1)及减速器(X2)的细分齿轮齿条(Z1)及谐波减速器(Z1)等是三级准则层。机械概念设计指标的第三层和第四层作为机械臂选型,进行机械臂的方案选型。

表1 实现各分功能的功能载体及特点
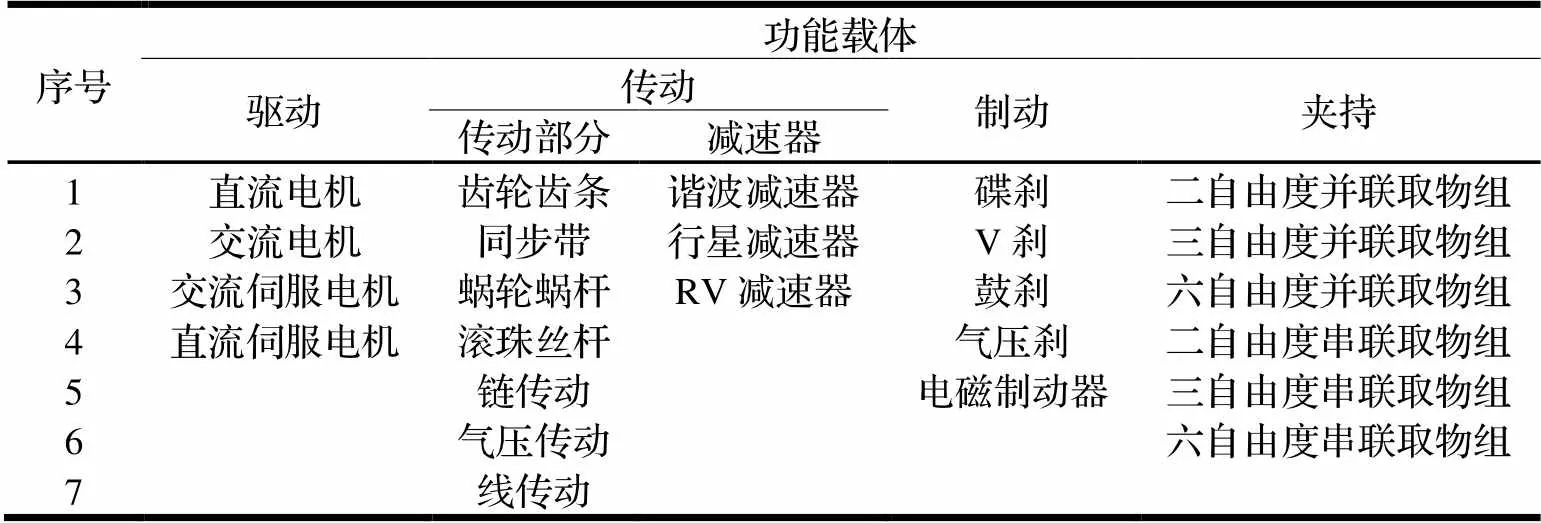
表2 机械臂的形态学矩阵
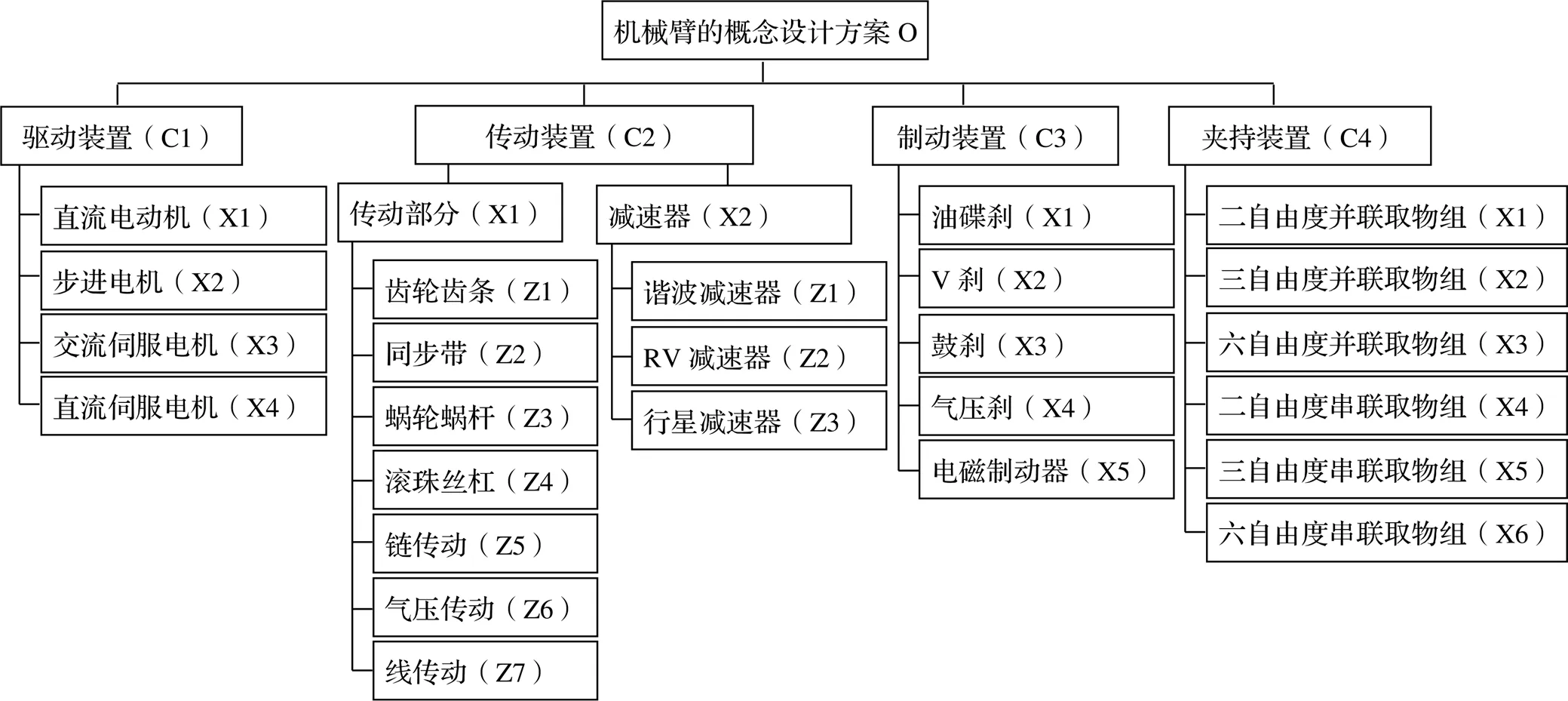
图4 机械臂概念设计指标
水龙头加工机械臂为中小型机械臂[10],驱动装置一般选择步进电机以及交流伺服电机;传动部分可以选择滚珠丝杠或同步带的方式降低成本,减速器可以选择常用的谐波减速器或RV减速器;制动装置根据经验选择电磁制动器或油碟刹。根据企业需求以及机械臂制造相关经验,选出六种预备方案,这六种方案为机械臂概念域所需评价的方案,如表3所示。
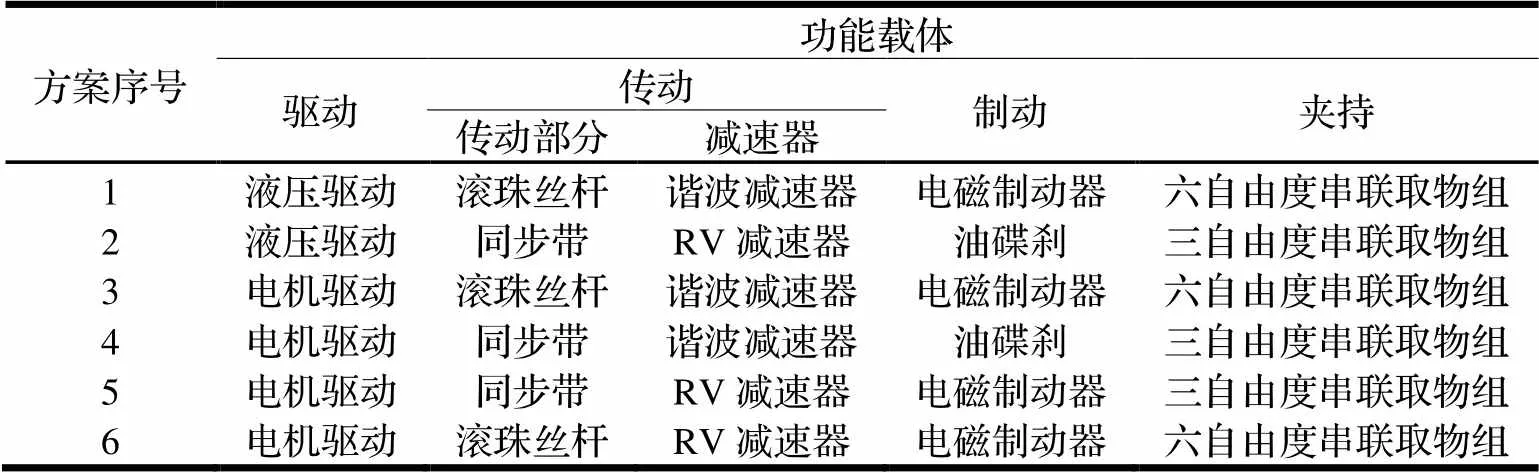
表3 机械臂的挑选方案
3.2 改进的比较矩阵构造方法
层次分析法构造比较矩阵时主观性较强,尤其是在比较因素与因素之间对上层的影响程度时,衡量标准没有细化。直接采用1~9的度量标准,主观性太强[11]。这里提出一种多目标决策方法来改进,提高其客观性。在比较重要性时的衡量标准,如选择液压驱动还是电动机驱动时,这两因素对驱动的影响程度,按照机械设计和企业要求,设置经济性、性能、后期制造难易程度这三个标准进行决策判断。
比较个因素1,2, ... ,C,对上一层O的影响程度,确定其在O的比重。对任意两个因数C和C,用a表示C和C对O的影响程度之比。
设:

式中:(a)为价值函数;k(=1,2,3)为标度常数,分别表示经济性、性能、后期制造难易程度;v∈[1,9]构造比较矩阵。
如表4所示,得到的比较矩阵是一致性正反矩阵,一致性正反矩阵一般存在max为其最大特征根,而最大特征根对应的特征向量为所求的权重。

表4 价值函数的比较矩阵
通过一致性检验,可以得到权向量为:

求出价值函数权重后,计算每一层各因素之间对应上一层的影响程度,计算其比较矩阵。
设第-1层n-1上个元素对最高层的权重向量为:

设第层上n个元素对上一层(第-1层)上第个元素的权重向量为:

式中:w-1为-1层第n个元素对最高层的权重;p为第层上第n个元素对上一层上第个元素的权重。
则得到矩阵:

式(5)为n×n-1矩阵,表示第层上的元素对第-1层各元素的权向量。则第层上的元素对最高层总排序权重向量为:
4 模型的求解
4.1 概念域方案的确定
计算得到的概念域设计指标的组合权重如表5所示。
概念域设计指标权重是由专家意见和基于价值函数的层次分析法计算得到[12],相当于一个机械臂概念域方案评价的专家经验库。选择机械臂方案时,计算方式是把机械臂方案对应的指标权重相加,如果再针对进行专家评价,其主观性会增加,客观性下降。进行类似的方案设计时,也只需要直接计算组合权重,就可以得到具有专家经验的方案[13]。机械臂概念域选型方案的权重结果如表6所示。
由表6可知,最高权重占比的方案4比方案3权重占比提高约4.8%,因此选择方案4,即:交流伺服电机、同步带、谐波减速器、油碟刹、三自由度串联取物组,并进行机械臂的机械简图绘制,如图5所示。

表5 概念域设计指标组合权重

表6 方案得分情况
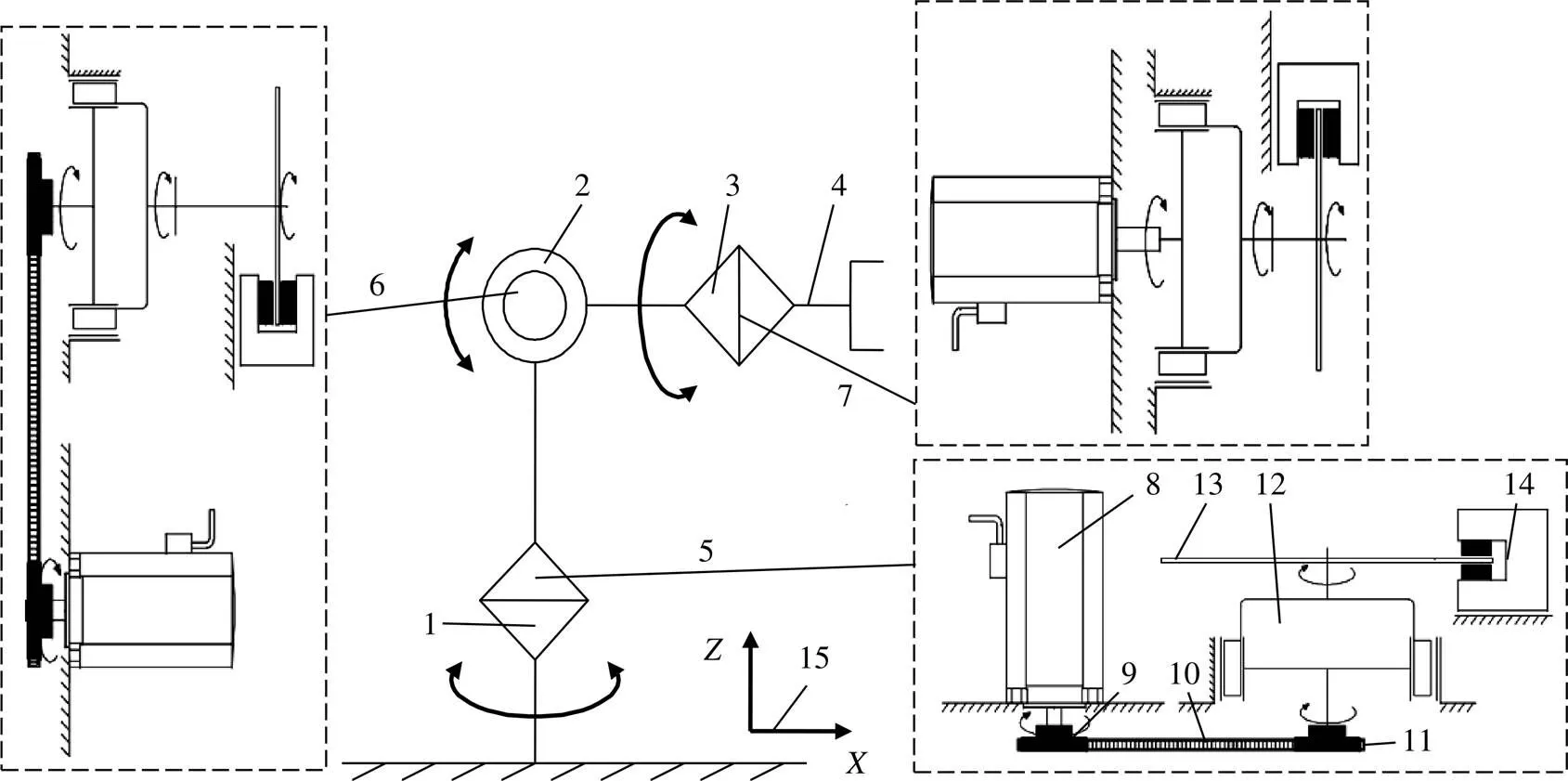
1.第一关节;2.第二关节;3.第三关节;4.末端夹具;5.第一关节驱动、传动及制动方式;6.第二关节驱动、传动及制动方式;7.第三关节驱动、传动及制动方式;8.伺服电机;9.同步带主动轮;10.同步带;11.同步带从动轮;12.谐波减速器;13.制动盘;14.油碟刹制动器;15.基坐标系。
4.2 概念域评价模型的工具开发
使用MATLAB程序,进行概念域评价模型工具的开发,该程序具有以下功能:
(1)建立层次结构,可以输入目标层、准则层和方案层。其中准则层是目标层的相关因素,一般不超过三层(一级准则层、二级准则层、三级准则层),三层以上层次结构非常复杂,内部因素过多,不适宜使用层次分析法。
(2)前置价值函数,可以输入和计算价值函数的权重,为后续计算提供基础。
(3)可以从txt文档里导入复杂的二维矩阵,在txt文档中修改矩阵。
(4)显示价值函数的权重、显示一级准则层对目标层的权重、显示二级准则层、三级准则层的最终组合权重。
(5)输入方案层,显示方案层的最终权重。
将得到的相关数据导入程序,验证其准确性。将所有机械臂数字孪生概念域的原始数据导入后计算得到的结果如图6所示。
对比图6与表6,发现计算结果计算准确,说明程序运行无误。

图6 价值函数层次分析法评价软件结果图
5 结论
本文在功能分析和形态学矩阵的基础上创新性地构建了概念域设计指标体系,针对设计指标,在企业需求与机械臂设计经验的基础上,筛选出六种方案。对层次分析法进行改进,结合多目标规划法,提出一种基于价值函数的层次分析法。即在原有的层次分析法中,对两个因素之间的比较采取指标价值函数的方式,提高了层次分析法的客观性,同时结合专家知识,使选择的方案具有专家水平。根据基于价值函数的层次分析法,开发出机械臂数字孪生模型的概念域评价软件。
[1]朱丽. 定制类机械产品概念设计方案评价研究[D]. 重庆:重庆大学,2015.
[2]薛立华. 机械产品概念设计方案生成及评价方法研究[D]. 大连:大连理工大学,2006.
[3]李柏翰,干静,周甜,等. 深海采样机器人的概念设计[J]. 机械,2016(5):44-50.
[4]邹旭东,白梦幻,顾锋. 基于模糊概念理论的汽车驱动桥零件关联关系研究[J]. 机械,2018(2):62-65.
[5]高瞩,吉晓民,高峰. 基于约束功能的机械产品概念设计方法研究[J]. 机械设计与制造,2013(5):256-259.
[6]陶飞,马昕,胡天亮,等. 数字孪生标准体系[J]. 计算机集成制造系统,2019,25(10):2405-2418.
[7]陶飞,张萌,程江峰,等. 数字孪生车间——一种未来车间运行新模式[J]. 计算机集成制造系统,2017,23(1):1-9.
[8]Min Liao,Guillaume Renaud,Yan Bombardier. Airframe digital twin technology adaptability assessment and technology demonstration[J]. Engineering Fracture Mechanics,2020, 225(C):106793.
[9]Alfa Laval to use digital twin technology as it expands separator capacity[J]. Filtration Industry Analyst,2020(7):2-3.
[10]陶飞,刘蔚然,张萌,等. 数字孪生五维模型及十大领域应用[J]. 计算机集成制造系统,2019,25(1):1-18.
[11]楼俐. 自动武器快速设计方法研究与应用[D]. 南京:南京理工大学,2012.
[12]金熙哲(Kim Hui Chol). 基于FBS模型的执行机构系统计算机辅助概念设计研究[D]. 上海:上海交通大学,2007.
[13]薛帅,邹树梁,刘军. Brokk60机器人机械臂的动力学建模与仿真[J]. 机械,2019(12):22-26,31.
[14]李焕,李海博,樊庆文,等. 一种并联二自由度机械臂的控制算法研究[J]. 机械,2017(11):19-22.
[15]数字孪生体实验室.数字孪生体技术白皮书[Z]. 北京:安世亚太科技股份有限公司,2019.
Research on Evaluation Method of Conceptual Domain of Robotic Arm Digital Twin Model
XIE Yihao,WANG Jiansheng,XIE Afen,KANG Xianmin,YU Hongzhi,CHEN Yao
( Faculty of Intelligent Manufacturing, Wuyi University, Jiangmen 529020, China)
The first step in the evaluation process of the digital twin model of the robotic arm is to evaluate the conceptual design of the robotic arm. The quality of the evaluation method directly affects the design and manufacturing effects of the entire robotic arm. An analytic hierarchy process based on value function is proposed, and a mixed scheme evaluation model is constructed on the basis of functional analysis and morphological matrix. In the original process of analytic hierarchy process, the way of index value function is adopted to compare the two factors, which improves the objectivity of analytic hierarchy process. The research on the digital twin conceptual domain model of the robotic arm solves the problem of selecting and optimizing the design of the robotic arm; the introduction of expert knowledge improves the objectivity of its evaluation; with the analytic hierarchy process based on the value function, the conceptual domain evaluation software of the digital twin of the robotic arm is developed.
digital twin;conceptual domain design;morphological matrix;analytic hierarchy process
TP241
A
10.3969/j.issn.1006-0316.2021.12.003
1006-0316 (2021) 12-0020-07
2021-03-09
2018年国家重点研发项目数据驱动的产品自适应在线设计模式与系统架构研究项目:产品自适应在线设计平台(2018YFB1701701);2021年广东省普通高校重点领域专项项目:基于数字孪生的机械臂多域演化方法及成熟度评价的应用研究(2021ZDZX1045)
谢奕浩(1994-),男,广东惠州人,硕士研究生,主要研究方向为现代数字化设计,E-mail:744309128@qq.com;王建生(1963-),男,河南焦作人,博士,博士后,教授,硕士生导师,主要研究方向为CAD/CAM/CAE和智能装备及机器人技术等,E-mail:jians_wang@126.com。
猜你喜欢
建材发展导向(2022年20期)2022-11-03 01:07:04
防爆电机(2022年4期)2022-08-17 05:59:06
建材发展导向(2021年7期)2021-07-16 07:08:06
文艺生活(艺术中国)(2018年11期)2019-01-03 08:42:18
中国交通信息化(2017年9期)2017-06-06 07:14:54
项目管理技术(2016年8期)2016-05-17 05:39:14
工业设计(2016年11期)2016-04-16 02:44:16
中国继续医学教育(2015年2期)2016-01-06 01:36:16
中国交通信息化(2015年3期)2015-06-05 03:53:39
振动、测试与诊断(2014年6期)2014-03-01 01:14:50
