脚踝康复训练机构研究综述
2022-01-10 08:25崔皓然马常友樊亚飞张昕辰张传望庞震薛毅姜嘉雯
机械 2021年12期
崔皓然,马常友,樊亚飞,张昕辰,张传望,庞震,薛毅,姜嘉雯
脚踝康复训练机构研究综述
崔皓然,马常友*,樊亚飞,张昕辰,张传望,庞震,薛毅,姜嘉雯
(佳木斯大学 药学院,黑龙江 佳木斯 154007)
分析了国内外脚踝康复训练装置的研究现状,讨论了脚踝康复训练装置在机械结构、控制算法、工作空间和运动性能评价等方面现有的研究方法。综述了并联机构、自由度和驱动方式的大致分类,简述了各机械结构的优缺点,并给出了相应结论。控制算法主要包括自适应导纳控制方案、位置和接纳控制方案及轨迹规划,工作空间主要包括位置空间和姿态空间,运动性能评价主要包括操作性、灵巧性和安全性。最后,列举了脚踝康复训练装置研究中存在的问题,同时提出了解决问题的相关方法。
机械结构;控制算法;工作空间;运动性能评价
人体能够完成站立、行走、跑跳等动作,与脚踝的作用密切相关。由于人类活动愈加频繁,导致人口老龄化、运动不当、意外事故、疾病等多方面因素造成的脚骨关节损伤也不断增加,针对脚踝损伤的康复训练器具的需求日益提升[1-5]。现有的脚踝康复机器人只能提供单一的被动或主动康复训练功能,无法满足不同程度脚踝损伤患者对康复训练的需求。不同损伤程度症状及传统治疗如表1所示。
从装置的可操作性、灵活性、平衡性、安全性和经济性来考虑,传统的脚踝康复装置存在价格昂贵、灵活性低、安全性差等问题[6-8]。随着康复机器人在医工结合领域、康复工程中的快速发展[5,9-11],改善上述装置所存在的问题已成为近几年的研究热点。
本研究通过回顾脚踝康复训练装置研究已取得的主要成果,分析对比脚踝康复训练装置在机械结构、控制算法、工作空间和运动性能评价方面的一些研究方法,列举了脚踝康复训练装置研究中存在的相关问题,同时提出了相应的解决方法。
1 研究现状
脚踝康复训练装置的研究最早可以追溯到1934年,Polladr等[12]用于汽车喷漆的平行结构。1947年,Gough等[12]建议使用由平行机构组成的装置来检测轮胎,提出一种包含并联机构的设备。虽然这些机构并不具有工业推广性,但为以后的脚踝康复训练装置的发展奠定了一定的基础。
1.1 国外研究现状
国外对脚踝康复训练装置的研究已有五十多年的积累,并取得了一定的成功。1999年,美国Rutgers大学[13]研制出一种基于stewart机构的6自由度踝关节康复系统,如图1所示,这是并联机构在医疗康复机构中的首次应用。该机构具有6条能自由伸缩的支链,因此是具有6自由度的并联踝关节康复机构,能够完成复杂的康复运动。
意大利Jody A.Saglia等[14]研究了一种具有冗余驱动的2-DOF脚踝康复并联机构,如图2所示,对机构建立了运动学模型,并对机构的工作空间、输出扭矩以及结构紧凑性进行优化设计。但该机构只有2个自由度,不能完成踝关节康复的所有动作。

表1 不同脚踝损伤程度症状及传统治疗方法

图1 6自由度踝关节康复机构

图2 冗余驱动结构
2006年,韩国光州科技学院[15]提出一种具有双动平台的新型脚踝康复训练装置,实现踝关节的运动,同时还可以实现足趾的上下运动,可促进趾关节的韧带强度康复。
2012年,Mizanoor Rahman等[16]设计出一种用于脑卒中患者的地面步态康复和辅助治疗的可变阻抗紧凑型可穿戴踝关节机器人AFO(Ankle Foot Orthosis,踝足矫形器),如图3所示,实现了自适应共享控制,提高了康复装置应用中的人性化。2015年,美国麻省理工学院[17]开发一种用于训练6~10岁神经功能受损儿童的一种由阻抗控制的低摩擦后驱动的脚踝康复训练装置PEDIAklebot,如图4所示,将行为量化技术纳入下肢机器人。

图3 用于步态康复和辅助治疗的AFO模型

图4 低摩擦后驱动的PEDIAklebot
2017年,土耳其的Karadeniz大学[18]设计了一种2自由度冗余驱动并联踝关节康复机器人,如图5所示,并同时设计了一种模糊逻辑控制器,提高了康复机器人在人机交互可能引起的外部干扰下的轨迹跟踪能力。
1.2 国内研究现状
国内对于脚踝康复训练装置的研究起步时间较晚。2005年,燕山大学的赵铁石等[19]提出一种基于3-RSS/S并联机构的脚踝康复训练装置,如图6所示,一定程度上代替医师对患者进行康复训练,但该装置灵活性不足,容易造成患者脚踝二次损伤。

图5 2自由度冗余驱动并联踝关节康复装置

图6 3-RSS/S并联机构的踝关节康复机器人
同年,河北工业大学刘更谦等[20]在此基础上分析了机构运动学逆解,推导了3-RSS/S并联机构的Jacobian矩阵,为3-RSS/S踝关节康复机器人的进一步研究打下基础。2007年,河北工业大学何春燕等[21]以3-RSS/S踝关节康复并联装置为研究对象,根据空间模型和各向同性,探究该装置速度性能和机构尺寸之间的关系,得出相应结论。
北京工业大学李大顺等[22]研究一种具有3自由度定点转动功能的3-RRS并联脚踝关节康复训练机构,该机构可在工作空间内以任意位姿实现三维转动。上海交通大学杨加伦等[23]对3-DOF正交SPM(Spherical Parallel Manpulator,球面平行推进器)模型进行研究,运用Rodrigues指数积公式求解机构的运动学正解,并利用机构的运动学逆解对正解结果进行结果验证,证实该机构设计的可行性。西安理工大学王庚祥等[24]对4-SPS/CU并联机构进行了研究,如图7所示,分析了单个运动副间隙对4-SPS/CU并联机构动态特性的影响,并得出运动副间隙越多、机构动态特性越不稳定的结论。
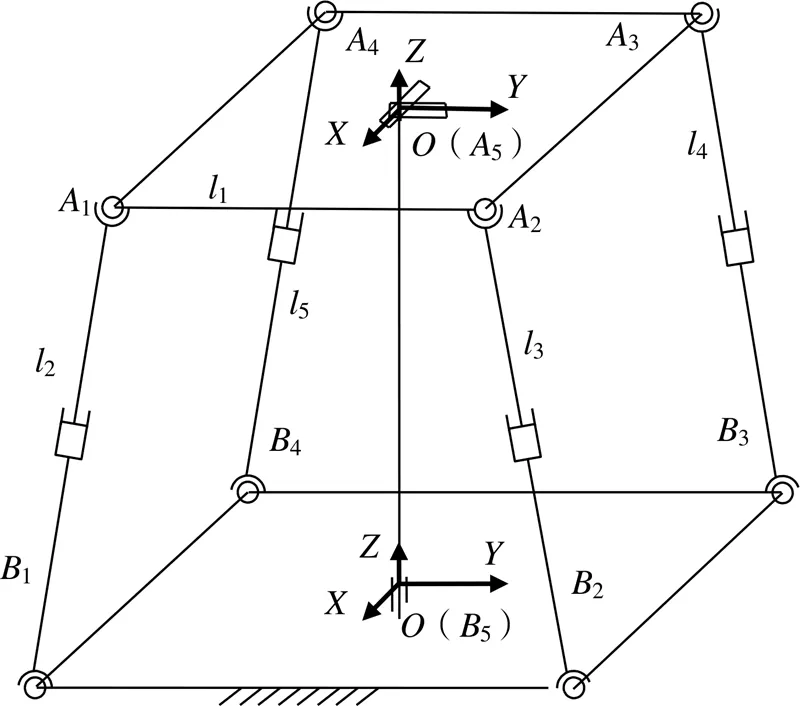
A1~A4、B1~B4为球副;l1~l4为移动副;A5为万向铰;B5为圆柱副;l5为支撑杆。
2018年,华中科技大学邓超等[25]基于故障树的定性分析和定量分析,对脚踝康复机器人的可靠性进行了评估,为脚踝康复装置的设计提供了依据。同年,邓超等[26]利用FMEA(Failure Mode and Effects Analysis,失效模式与影响分析)和FTA(Fault Tree Analysis,故障树分析)方法对奥克兰大学研制的脚踝康复机器人的可靠性进行分析,找到以气压为驱动方式的脚踝康复机器人的关键故障模式,为该机构的优化设计提供了理论依据。
2019年,北京工业大学李剑锋等[27]提出并设计出2-UPS/RRR型并联踝康复机器人样机,如图8所示。该构型结构紧凑,通过对机器人运动性能的评价证明,该结构在工作空间内不具有奇异位形,并有良好的运动学性能。
2020年,东北大学王海芳等[28]提出一种可以进行主被动康复训练和智能语音康复训练的3自由度转动的3-SPS/S踝关节并联康复机器人,如图9所示,可以满足患者康复后期脚踝关节康复治疗需求。2020年,燕山大学陈子明等[40]在研究现有脚踝关节康复机构的基础上,设计出一种基于3-UPU并联机构的新型踝关节康复机构,如图10所示,该机构的转动轴线可实现高度和角度方向的调节,从而使机构转动轴线与人体踝关节运动轴线更好地吻合,给患者带来更好的康复效果。

图8 2-UPS/RRR型并联踝康复机器人样机

图9 3-SPS/S并联康复机构
2 研究方法
近几年国内外的科研学者在此领域做了大量工作,并有一部分成熟产品已投放市场,但康复效果不是特别理想,脚踝康复训练装置的研究还处于起步阶段。近几十年的研究积累已形成了一整套研究方法,具体体现在机械结构、控制算法、工作空间和运动性能评价等几个方面的理论,这些理论运用到实践中后可以进一步完善和发展装置。
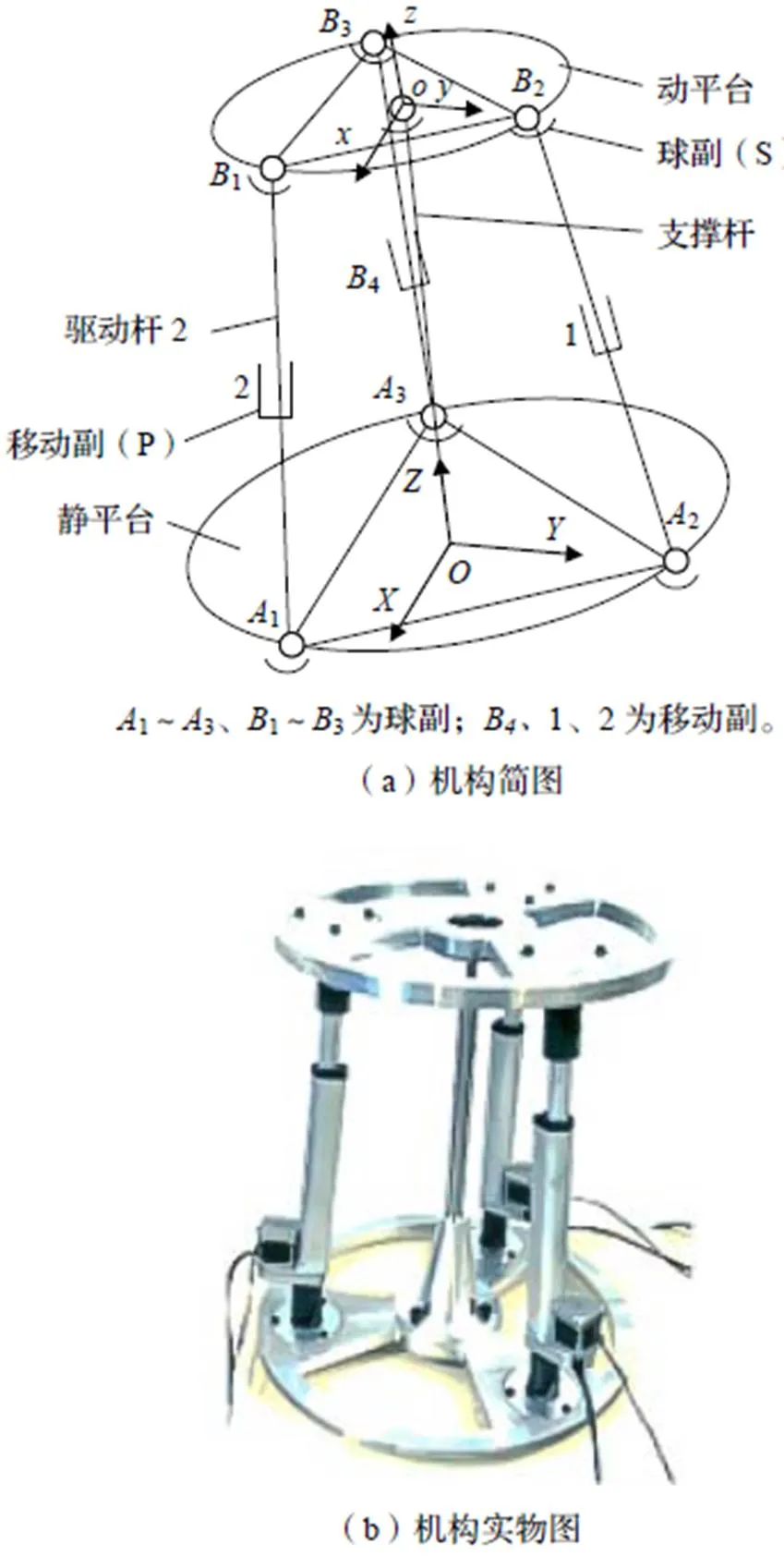
图10 3-UPU并联踝关节康复机构
2.1 机械结构
赵瑞杰等[29]根据人体生理学和踝关节结构,踝关节可视为一个具有3个转动自由度(背伸/趾屈、内翻/外翻、内旋/外旋)的球关节。脚踝康复训练装置的本体一般由机械系统(定平台、动平台、驱动杆支链和支撑杆)和电控系统两部分组成。对脚踝康复训练装置进行合理的机械结构设计,能为患者在康复训练时提供可靠的稳定性、安全性和灵活性。整个脚踝康复训练装置的机械结构可分为两个方面:脚踝康复训练装置的结构类型和驱动机械结构。
2.1.1 结构类型
刘芳芳等[30-32]指出,传统的康复训练装置分为串联和并联两种机构类型,其中并联机构具有两个或两个以上的运动自由度。串并联机构优缺点如表2所示。
由于脚踝康复装置在实时计算时是计算反解,而脚踝康复训练需要很高的精密度和灵活性,因此并联机构比串联机构更适合。但并联机构不能很好地解决正解,所以还需要结合串联来共同解决正反解问题。
按并联机构的自由度数分类可分为2~6个自由度并联机构。国内外大多数脚踝康复训练装置都能提供3个旋转自由度的脚踝康复训练,且实时监测数据并控制运动参数[33]。3自由度并联机构种类较多,形式复杂,而2自由度、4自由度和6自由度的下肢康复训练装置非常少见。任相名[34]设计出一种少自由度且增大安全性的康复装置。不同自由度代表机构和优缺点如表3、表4所示。
因此认为3自由度是最适宜脚踝康复机构的运动形式。
球面并联机构(SPM,Spherical Parallel Manpulator)作为并联机构的一种特殊类型,具有工作空间大、各个零件之间不易发生干涉的特点,相对于不使用球面并联机构的康复装置,其拥有更好的运动性能,且能实现3自由度的转动。球面并联机构又可分为固定球心并联机构和广义球面并联机构两种类型。刘承磊等[35]在面向踝部康复的广义球面并联机构型综合研究中分析得到,人体踝关节的运动为两个关节的复合运动,空间各向转动轴线空间无交汇体系,如果为固定球心的球面运动,则必然影响人机相容性,引起人机交互力,并且基于枚举法和螺旋理论,提出一种广义球面并联机构型综合方法,适用于踝部康复机器人本体研究的3、4、5自由度定心距及4、5、6自由度变心距广义球面并联机构。优缺点如表5所示。

表2 串并联机构优缺点比较

表3 不同并联机构的自由度及代表结构

表4 不同自由度优缺点比较

表5 固定球面机构和广义球面机构优缺点
故广义球面并联机器人能够在自由度上满足踝关节康复需求。
2.1.2 驱动机构
目前,临床使用的脚踝康复训练装置大部分以气压驱动为主,但这种驱动方式并不便于使用。对于目前所研究的脚踝康复训练装置,按驱动方式可分为气压驱动、电动驱动和绳驱动三种。杨海鹏等[36-38]分别对绳驱动踝关节康复机器人进行研究,验证了绳驱动在下肢康复机器人中的有效性。徐图等[39]在研究机构的驱动方式中指出,气压驱动主要是利用气动人工肌肉,由外部提供的压缩空气驱动,作推拉动作,可以很好地模仿人体的肌肉运动。刘芳芳等[40]通过实验指出,相对于气压驱动,移动副驱动(电驱动)对于踝关节康复机器人是更好的驱动方式。
不同驱动类型优缺点如表6所示。

表6 不同驱动方式优缺点
陈子明等[41]通过对机构的奇异性分析发现以移动副作为驱动时不会出现驱动奇异。黄真等[42]通过实验得到机构的分值奇异与平台约束奇异可以通过对机构的转动副轴线与平台夹角设计而加以避免。
故采用移动副提供驱动力,可以更好地控制康复训练装置,维持装置的稳定性,同时还可以节省不必要的能量消耗。
2.2 控制算法
踝关节康复训练装置的控制算法建立在系统动力学和人机交互动力学基础上,用于提高康复效果和解决康复训练中安全性等问题。Ismail Hakki等[18]提出一种基于模糊逻辑的自适应导纳控制方案,使机器人能够根据病人的残疾程度来适应阻力/辅助程度,并通过布谷鸟算法(CSA,Cuckoo Search Algorithm)证明了该方案的有效性。Jody A. Saglia等[43]使用位置和接纳控制方案解决了患者被动和主动运动模式,并解决了辅助控制器的稳定性等问题。王海芳等[28]设计出一种由多轴运动控制器、传感器、语音模块、显示器、降压模块、继电器以及应急按钮组成的控制系统,提高了康复训练中的安全性和可操作性。
廖志伟等[44]分析得到,合理的轨迹可以使康复装置具有较强的运动平衡性和较弱的启停冲击,很大程度上避免患者脚踝的二次损伤。庄鹏等[45]依据传统摆线函数与矩形函数设计出一种启停平稳性好,最大速度/加速度、刚性冲击较小的组合函数形式的运动轨迹,为脚踝康复机器人的控制提供了基础数据。卢宗兴等[46]通过对比3-PH/R踝关节机器人的三种运动轨迹,探讨出不同运动轨迹对肌肉和关节的影响以及运动轨迹之间的联系,并指出对于不同脚踝受伤情况要慎重选择康复轨迹。赵向阳等[47]提出,正常人在行走时脚踝关节活动角度俯仰在25°~30°,因此,设计机构只需使人的踝关节在25°~30°做上下往复摆动的运动,即可满足脚踝康复的最低要求。
2.3 工作空间
并联机构的工作空间[48]是机构所能达到的工作区域和衡量机构工作性能的重要指标之一。在进行运动轨迹规划时,应防止构件干涉或碰撞。将动平台的运动范围控制在工作空间内,机构就能正常维持运作。按照动平台末端运动形式的不同分为位置空间和姿态空间[49]。
参考GB 10000-1988[50]26~35岁人体尺寸,得出一套踝关节康复机构尺寸参数,并对机构求反解得出其工作空间,从而证明该机构工作空间的内部不存在奇异。刘芳芳等[39]通过几何约束分析、数值离散搜索法求解姿态工作空间和数值仿真计算实例证明,该机构可对损伤脚踝实现全面的康复治疗。刘秀莹等[51]通过MATLAB计算广义球面并联机器人的驱动转动副的转动范围,得出该装置的工作空间在各基准面上的投影都具有一定对称性,且内部没有空洞这一结论,表明在其有效工作空间内机器人的运动性能良好。
2.4 运动性能评价
李剑锋等[27]通过实验指出可操作度是反映装置在姿态和位移方面可操作能力的度量,同时也是评价其在某位姿下灵活性的重要指标。
灵巧性是反映机器人综合运动性能优劣的重要评价标准。SALISBURY等[52]采用雅可比矩阵的条件数作为灵巧性的指标,当踝关节康复机器人各个条件变化参数在工作时趋于稳定状态,则说明机器人有较好的运动灵巧性。
安全性也是重要的运动性能评价标准,每一种踝康复装置都应包括监测和确保执行机构扭矩、速度和位移在预先规定范围内的软件、实时监测传感器、地面故障检测器和紧急开关等,从而才能很大程度上确保康复训练中患者的安全。
3 存在问题
脚踝康复训练装置仍然存在许多待解决的问题:
(1)现有脚踝康复训练装置只能按程序设置的运动轨迹和强度进行康复训练,机械式重复运动不能带给患者沉浸式的体验,增加了康复训练的时间。
(2)脚踝损伤有三个等级,每个等级的损伤都需要相应程度的康复训练,现有脚踝康复训练装置对每个损伤等级的患者都有一定的作用,但不能针对受伤程度不同的患者选择合适的训练模式,导致康复效果不理想。
除此之外,从1999年至今,各种样式的脚踝康复训练装置的灵活性、安全性、平衡性和可操作性还有待提高。
4 展望
随着脚踝康复训练装置的发展和研究的日益深入,脚踝康复训练装置在稳定性、灵活性和高效性等方面的性能将不断提高,能够满足更多不同人群、不同脚踝损伤程度康复训练的需要,因而具有广阔的应用前景。
脚踝康复训练装置有两个趋势值得关注:
(1)沉浸式康复训练。科学技术的不断发展成熟为传统训练模式提供了新的发展方向,通过虚拟场景游戏将康复训练过程以视觉形式反馈给患者,使患者在沉浸式的虚拟环境中进行康复训练,可以帮助患者以更主动、更高效、更易于理解的方式进行脚踝康复训练,很大程度上缩短康复训练时间。
(2)针对性设计脚踝康复训练装置。目前市场上的脚踝康复训练装置对各个年龄段的人群都适用,但针对性的恢复效果并不理想。青少年在运动过程中踝关节损伤最为常见,往往为Ⅰ度、Ⅱ度损伤,由于其骨骼正处于发育阶段,致使康复的时间相对较长,所以设计一种针对青少年的脚踝康复训练装置有深远的医学意义和经济价值。
[1]高晓娟,储照伟,李文言,等. 变频振动训练对功能性踝关节不稳的影响[J]. 医用生物力学,2020,35(6):685-691.
[2]闫桂芳,王中立,赵志红,等. 踝足康复牵引器对脑卒中偏瘫患者踝关节活动范围及步行能力的影响[J]. 中国康复理论与实践,2011,26(11):1082-1083.
[3]汪家琮. 踝关节和足的康复[J]. 中国康复理论与实践,2008,14(12):1197-1198.
[4]牛皓,姜斌,张杰,等. 下肢整体康复训练治疗功能性踝关节不稳的疗效观察[J]. 中国康复,2021,36(1):12-16.
[5]王勇军. 踝关节康复机构的设计与分析[D]. 太原:中北大学,2020.
[6]张晓东. 踝关节康复解耦并联机器人的设计与控制研究[D]. 福州:福州大学,2016.
[7]隋鹏举. 踝部关节运动建模及踝关节康复机构设计[D]. 福州:福州大学,2011.
[8]薛建明. 医疗外骨骼康复机器人的发展[J]. 医学信息,2019,32(9):11-13.
[9]张弛. 面向按需辅助的柔性脚踝康复机器人层级控制研究[D]. 武汉:武汉理工大学,2019.
[10]朱承祥. 并联冗余柔性脚踝康复机器人设计及其运动控制研究[D]. 武汉:武汉理工大学,2019.
[11]刘璐. 交互式脚踝复健平衡训练系统设计[D]. 上海:上海交通大学,2018.
[12]彭忠琦. 并联机构的发展及应用[J]. 光机电信息,2011,28(12):45-50.
[13]GIRONE M,BURDEA G,BOUZIT M,et al. A Stewart platform-based system for ankle telerehabilitation[J]. Autonomous Robots,2001,10(2):203-212.
[14]Saglia J A,Tsagarakis N G,Dai J S,et al. A high-performance redundantly actuated parallel mechanism for ankle rehabilitation[J]. international Journal of Robotics Research,2009,28(9):1216-1227.
[15]YOON J,RYU J,LIM K B. Reconfigurable ankle rehabilitation robot for various exercises[J]. J. Robot Syst.,2006,22(S1):15-33.
[16]Rahman S,Ikeura R. A Novel Variable Impedance Compact Compliant Ankle Robot for Overground Gait Rehabilitation and Assistance[J]. Procedia Engineering,2012(41):522-531.
[17]Michmizos K P,Rossi S ,Castelli E ,et al. Robot-Aided Neurorehabilitation:A Pediatric Robot for Ankle Rehabilitation[J]. IEEE Transactions on Neural Systems & Rehabilitation Engineering,2015,23(6):1056-1067.
[18]Ayas M S,Altas I H. Fuzzy logic based adaptive admittance control of a redundantly actuated ankle rehabilitation robot[J]. Control Engineering Practice,2017(59):44-54.
[19]赵铁石,于海波,戴建生. 一种基于3-RSS/S并联机构的踝关节康复机器人[J]. 燕山大学学报,2005(6):471-475.
[20]刘更谦,高金莲,杨四新,等. 踝关节康复训练并联机构构型及其运动学分析[J]. 机电产品开发与创新,2005,18(5):12-14.
[21]何春燕,张小俊,张泰,等. 3-RSS/S踝关节康复并联机器人的速度各项同性分析[J]. 河北工业大学学报,2007,36(4):39-52.
[22]李大顺,李剑锋,王飒,等. 并联3-RRS踝关节康复机构及运动分析[J]. 机械设计与制造,2015,18(8):4-9.
[23]杨加伦,高峰,戚开诚,等. 正交三自由度球面并联机构的位置正反解新方法[J]. 机械设计与研究,2008,24(3):30-36.
[24]王庚祥,原大宁,刘宏昭,等. 空间4-SPS/CU并连机构运动学分析[J]. 农业机械学报,2012,42(3):207-214.
[25]邓超,陶志奎,吴军. 脚踝康复机器人的可靠性评估[J]. 工业工程,2018,21(5):50-56.
[26]邓超,陶志奎. 基于FMEA和FTA的脚踝康复机器人可靠性分析[J]. 机器人技术与应用,2018(1):27-33.
[27]李剑锋,张凯,张雷雨,等. 并联踝康复机器人的设计与运动性能评价[J]. 机械工程学报,2019,55(9):29-39.
[28]王海芳,陈晓波,张瑶,等. 3-SPS/S踝关节并联式康复机器人设计[J]. 中国工程机械学报,2020,18(3):237-241,247.
[29]赵瑞杰. 3-PPR球面并联机构运动学性能研究与应用[D]. 太原:中北大学,2017.
[30]刘芳芳. 3-UPUR/RRR并联踝关节康复机构的设计与性能研究[D]. 西安:西安理工大学,2018.
[31]边辉,刘艳辉,梁志成,等. 并联2-RRR/UPRR踝关节康复机器人机构及其运动学[J]. 机器人,2010,32(1):6-12.
[32]李旭,罗霞,罗成,等. 基于离散蒙特卡洛的一种3T1R并联机构工作空间分析[J]. 机械,2020,47(5):27-32.
[33]樊晓琴. (2-SPU-PU)&R混联式踝关节康复机构的设计与性能研究[D]. 太原:中北大学,2019.
[34]任相名. 一种用于脚踝康复的少自由度并联机构研究[D]. 秦皇岛:燕山大学,2019.
[35]刘承磊,张建军,戚开诚,等. 面向踝部康复的广义球面并联机构型综合[J]. 机械工程学报,2020,56(19):79-91.
[36]杨海鹏. 绳索牵引下肢康复机器人绳索力优化及控制研究[D]. 哈尔滨:哈尔滨工程大学,2019.
[37]禹润田. 新型绳驱动并联踝关节康复机构设计及分析[D]. 北京:北京交通大学,2015.
[38]周聪. 可穿戴式绳驱动踝关节康复机器人设计研究[D]. 成都:电子科技大学,2020.
[39]徐图. 气动肌肉驱动脚踝康复机器人控制方法研究[D]. 武汉:武汉理工大学,2015.
[40]刘芳芳,周春国,黄阳,等. 一种并联脚踝康复机构的运动学与工作空间分析[J]. 机械设计,2019,36(1):44-50.
[41]陈子明,尹涛,潘泓,等. 一种三自由度并联踝关节康复机构[J]. 机械工程学报,2020,56(21):70-78.
[42]陈子明,张扬,黄坤,等. 一种无伴随运动的对称两转一移并联机构[J]. 机械工程学报,2016,52(3):9-17.
[43]Saglia J A, Tsagarakis N G,Dai J S,et al. Control Strategies for Patient-Assisted Training Using the Ankle Rehabilitation Robot (ARBOT)[J]. IEEE/ASME Transactions on Mechatronics,2013,18(6):1799-1808.
[44]廖志炜,张俊,卢宗兴,等. 基于组合函数的脚康复机器人轨迹规划[J]. 机电工程,2018,35(3):302-309.
[45]庄鹏,姚正秋. 基于摆线运动规律的悬索并联机器人轨迹规划[J]. 机械设计,2006,23(9):21-24.
[46]卢宗兴,魏湘文,蔡灿. 3-PH/R踝关节康复机器人的运动轨迹[J]. 医用生物力学,2021(1):110-115.
[47]赵向阳,狄菲菲,尹彦存. 一种基于平面连杆机构原理的新型脚踝康复机的设计与研究[J]. 现代制造技术与装备,2017(8):11-12,15.
[48]段艳宾,梁顺攀,曾达幸,等. 6-PUS/UPU并联机器人运动学及工作空间分析[J]. 机械设计,2011,28(3):36-40.
[49]Gallardo J,Orozco H,Rico J M. Kinematics of 3-RPS par-allel manipulatons by means of screw theory[J]. International .Joumal of Advanced M anufacturing Technology,2010,45(7):1013-1023.
[50]国家技术监督局. 中国成年人人体尺寸:GB 10000-88[S]. 北京:中国标准出版社,1989.
[51]刘秀莹,张建军,刘承磊,等. 基于工作空间的踝关节康复广义球面并联机器人运动学参数优化[J]. 中国机械工程:2021(16):1921-1929.
[52]Salisbury J K, Craig J J. Articulated hands: Force control and kinematic issues[J]. The International Journal of Robotics Research,1982,1(1):4-17.
Review of Ankle Rehabilitation Training Mechanism
CUI Haoran,MA Changyou,FAN Yafei,ZHANG Xinchen,ZHANG Chuanwang,PANG Zhen,XUE Yi,JIANG Jiawen
(College of Pharmacy,Jiamusi University, Jiamusi 154007, China)
This paper analyzes the present research of ankle rehabilitation training devices at home and abroad, and discusses the existing research methods of ankle rehabilitation training devices in mechanical structure, control algorithm, working space and sports performance evaluation. The general classification of parallel mechanisms, degrees of freedom and driving modes are summarized. The advantages and disadvantages of each mechanical structure are briefly described and the corresponding conclusions are given. The control algorithm mainly includes adaptive admittance control scheme, position and admission control scheme and trajectory planning, and the workspace mainly includes position space and orientation workspace. The evaluation of motion performance mainly includes maneuverability, dexterity and safety. Finally, the problems existing in the research of ankle rehabilitation training devices are listed, and the relevant methods to solve the problems are put forward.
mechanical structure;control algorithm;workspace;motion performance evaluation
TP242.3
A
10.3969/j.issn.1006-0316.2021.12.002
1006-0316 (2021) 12-0011-09
2021-04-28
全国大学生创新创业训练计划项目(202010222045);黑龙江省大学生创新创业训练计划项目(202010222045)
崔皓然(2000-),男,山西长治人,主要研究方向为医工结合设备研究,E-mail:782463254@qq.com。*通讯作者:马常友(1982-),男,黑龙江佳木斯人,博士,讲师,主要研究方向为康复机器人的应用及机器研究,E-mail:mcyazh@126.com。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
中老年保健(2021年7期)2021-08-22
基层中医药(2021年12期)2021-06-05
养生保健指南(2019年4期)2019-12-17
中国环境监察(2016年7期)2016-10-23
中华骨与关节外科杂志(2016年6期)2016-05-17
中国民族医药杂志(2016年5期)2016-05-09
通信电源技术(2016年1期)2016-04-16
Coco薇(2015年5期)2016-03-29
通信电源技术(2016年5期)2016-03-22