
ATO设备故障时列车全自动运行技术方案研究
2022-01-10 11:40银益辉雷成健
控制与信息技术 2021年6期
银益辉,雷成健,刘 泽
(株洲中车时代电气股份有限公司,湖南 株洲 412001)
0 引言
城轨交通全自动运行(fully automatic operation,FAO)系统是基于现代计算机、通信、控制和系统集成等技术,实现列车运行全过程自动化的新一代城市轨道交通系统[1]。它能够实现列车的自动启动、自动运行、车站定点停车、自动折返及自动出入车辆段等功能, 同时对列车上乘客状况、车厢状态和设备状态进行监视和检测, 对列车各系统进行自动诊断,将列车设备状况及故障报警信息传送到控制中心, 对各种故障和意外情况分门别类做出处置预案[2],其整个过程遵循IEC 62267[3-4]和IEC 62290[5-6]相关标准要求。
FAO系统在列车运营调度、维护维修和行车控制等方面的性能与既有轨道交通运行控制系统的相比均有大幅度提升[7],实现了高可用、高可靠和高安全,是必然的技术发展趋势[8]。根据标准要求,当FAO系统满足GoA3和GoA4[3]级别的自动化水平要求时,列车上不配备司机,因此列车的运行控制完全依赖列车自动运行(automatic train operation,ATO)子系统,一旦控制端ATO发生故障,列车将无法继续自动运行,只能等待控制中心下令派遣司机或维修人员上车救援。若故障发生位置在长间隔运营区间内,救援难度将大大增加,导致运营效率降低。
针对以上情况,本文创新性地提出了一种解决方案,即若列车在区间内发生控制端ATO故障,可经过控制中心授权,进入到新增的受限自动驾驶模式(restricted autopilot mode, RAM),由列车自动防护(automatic train protection, ATP)系统通过列车网络使系统(train control and management system,TCMS)控制列车自动运行到下一站外停车后再实施救援。这样大大缩短了救援时间,提高了运营效率。
1 FAO系统
FAO系统是基于连续、双向和高性能的车地无线通信,能够实现移动闭塞的高性能列车运行控制系统,涉及车辆、信号、综合监控、通信、站台门、车辆基地等多个联系密切的系统。其在传统的基于通信的列车控制系统(communication based train control system,CBTC)的基础上做了全自动运行功能的提升,将司机的工作移交给ATO系统和控制中心去完成。将由原来的司机、控制中心调度员和车站值班员共同参与控制的运营控制模式,转变为以控制中心调度员直接面向运行的运营控制模式,该运营控制系统可以实现更加完善的自动控制功能,以行车为核心,信号、车辆、综合监控、通信等多系统配合,提升了轨道交通运行系统的整体自动化水平[9]。
信号系统是FAO系统的核心组成部分,由车载列车自动保护(automatic train protection, ATP)、列车自动运行(ATO)、休眠/唤醒单元、计算机联锁(computer based interlocking, CI)、列车自动监控(automatic train supervision, ATS)、数据通信(data communication system, DCS)子系统构成。
如图1所示,全自动运行信号系统架构分为 3 层,包括中心系统、车站系统和车载系统。中心系统负责监控列车运行和服务乘客;车站系统负责监控站内设备;车载系统负责列车的全自动运行。FAO系统在基于CBTC的系统和设备上的改动主要在以下几个方面:

图1 基于CBTC的全自动运行信号系统架构Fig. 1 Structure of FAO system based on CBTC
(1)ATS子系统增强了线路、列车、车辆段/停车场的监控与联动控制功能和维护监测功能。
(2)车载系统增加了列车休眠、唤醒、自动洗车、自动驾驶和精确停车、开关门控制、紧急制动、对位调整、对位隔离、列车工况管理、车辆鸣笛、车辆紧急状态处置、远程控制及维修监测等功能。
(3)地面ATP系统,包括区域控制器(zone control,ZC)和数据管理系统(data management system, DMS),新增了休眠唤醒防护、停车列检库及洗车库库门防护、建立防护区、轨旁人员作业防护开关防护、雨雪模式管理等功能。
(4)正线及车辆基地CI子系统增加了作业封锁区防护、站台关门按钮/库门控制、站台门隔离、维修监测功能。
(5)车站及轨旁设备增加了人员防护开关、站台关门按钮、驻车位应答器(环线)、与站台门的数据接口。
(6)车载设备增加了休眠/唤醒模块和ATO设备冗余配置,其与车辆通信采用冗余的MVB总线。
(7)车辆段增加了与正线一致的轨旁ATP/ATO计算机设备、应答器和人员防护开关。
2 当前ATO系统故障时的处理方案
在全自动运行信号系统中,车头与车尾各配置一套ATO系统,列车运行过程中,车头的ATO系统为控制端,车尾的ATO系统为非控制端。当列车处于全自动驾驶模式(fully automatic operation mode, FAM)时,若控制端ATO系统出现故障,列车紧急制动,无法以FAM模式继续运行,需要人工救援;若是非控制端ATO系统故障,列车则不降级,继续运行至终端站台后不再发车,等待人工救援。
2.1 控制端ATO故障处理流程
当前控制端ATO系统故障处理流程如图2所示。
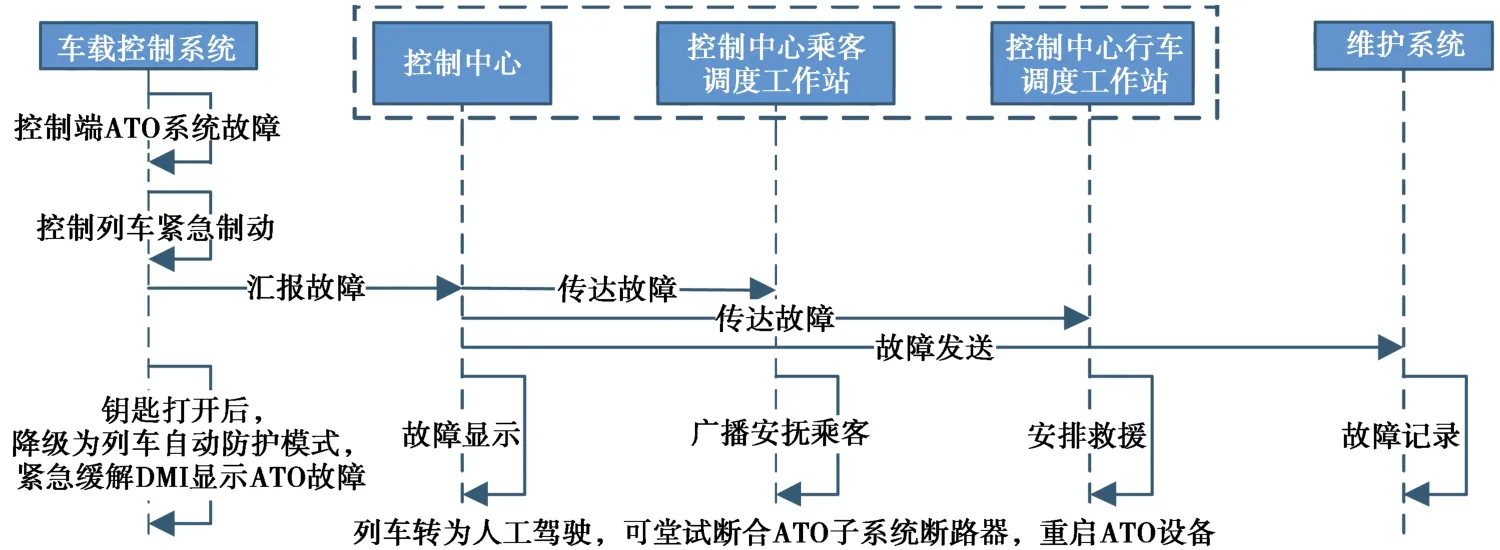
图2 目前全自动运行系统控制端ATO故障处理流程Fig. 2 Processing flow of ATO fault at the control end in FAO system at present
(1)车载ATP系统控制列车紧急制动停车(列车无法以FAM模式继续运行),向控制中心汇报故障,等待人工上车救援。
(2)控制中心ATS自动显示车载设备故障紧急制动,维护系统记录并显示“车载ATO设备故障”信息。
(3)收到报警信息后,控制中心乘客调度员通过远程广播安抚乘客,行车调度员指挥救援,中心派遣司机或维修人员上车救援。
(4)司机或维修人员根据运营规则现场记录故障现象后,可尝试断合ATO子系统断路器,重启ATO设备;若故障仍未恢复,打开控制端钥匙,转人工驾驶,根据运营指示驾驶列车运行。
可以看出,在当前FAO系统中,若列车在区间内发生控制端ATO故障,列车只能在区间内停车等待救援。若故障发生地点距离下一站台较远,救援人员从站台赶到现场花费时间长,极大地降低运营效率,乘客的情绪也会受到影响。
2.2 非控制端ATO系统故障处理流程
若非控制端ATO系统发生故障, 当前系统的处理流程如下:
(1)系统自动向控制中心乘客调度设备报警,乘客调度设备显示车载设备非控制端ATO系统故障,维护系统记录并显示“非控制端车载ATO设备故障”信息。
(2)列车保持FAM模式运行到终端站台后不再发车。
(3)收到报警后,中心派遣司机或维修人员在终端站台等待列车,列车进站后司机或维修人员上车后根据运营规则现场记录故障现象,并尝试断合ATO子系统断路器,重启ATO设备;若故障仍未恢复,则转人工驾驶,根据运营指示驾驶列车运行。
可见,即使列车非控制端ATO系统发生故障,控制端ATO系统依然可以正常控制列车自动运行至终端站,救援人员在终端站台等待列车到站后上车实施救援。
3 控制端ATO系统故障的新解决方案
为了提高FAO系统在控制端出现ATO故障时的运营效率,在列车信号系统中增加受限的自动驾驶模式,即RAM模式。当控制端ATO系统发生故障时,在控制中心授权后,列车可进入RAM驾驶模式。在该模式下,车载ATP系统通过TCMS控制列车自动运行到下一站外停车,再由控制中心安排司机或维护人员上车救援,可大大减少救援时间,提高运营效率。
3.1 RAM模式的实现方式
3.1.1 RAM模式下信号系统的控制
在FAO系统中,牵引/制动指令和级位由ATO系统计算并输出给TCMS,控制列车的牵引与制动。在RAM模式下,由于控制端ATO系统故障,无法通过总线(如MVB)向TCMS发送牵引/制动指令和级位信息。因此,需在车载信号设备上增加两根硬线,用于向TCMS输出“RAM模式”与“RAM列车启动/停止”信息,以此向TCMS传输牵引/制动指令及限速要求。此时需由TCMS承担一定的牵引/制动级位计算功能,从而越过故障ATO系统完成对列车的牵引与制动控制,使列车继续运行。RAM模式下信号系统控制的具体过程如下:
(1)当车载ATP收到控制中心授权进入RAM模式后,其向TCMS输出“RAM模式”高电平与“RAM列车启动”高电平。此时,由TCMS进行列车级位的计算,以恒速的方式控制列车向车站运行。
(2)车载ATP系统实时计算当前的列车位置,并与电子地图线路数据中的RAM停车位置信息进行比较。当列车进入RAM停车位置时,向TCMS输出“RAM模式”高电平与“RAM列车启动”低电平,并通过TCMS控制列车制动。
3.1.2 RAM模式下TCMS控制行车
在RAM模式下,牵引/制动指令和级位由TCMS系统计算和发出,牵引系统DCU执行牵引和电制动操作,制动力不足部分通过牵引系统BCU的空气制动补足。
TCMS收到“RAM模式”高电平与“RAM列车启动”高电平时,根据预设的限速值(25 km/h,可配置)控制列车以25 km/h的速度恒速运行(偏差暂定为±3 km/h)。当网络采集到的硬线“RAM列车启动”信号同时为高电平时,在列车已进入RAM模式的前提下,TCMS主动向DCU和BCU输出牵引指令,并根据预设的限速值输出对应的级位信息至DCU与BCU,使列车保持恒速运行。
当“RAM列车启动”高电平被撤销时(此时RAM模式仍有效),TCMS根据列车实时状态按照预设逻辑主动向BCU与DCU输出制动指令及级位,控制列车停车。在列车停车后,由BCU自动施加保持制动,同时也可由ATP补充施加紧急制动。
3.2 基于RAM模式的控制端ATO系统故障处理流程
当列车在区间内发生控制端ATO系统故障时,基于RAM模式的列车自动运行处理流程如图3所示。

图3 RAM模式下列车区间内控制端ATO故障处理流程Fig. 3 Processing flow of ATO fault at the control end when train in blocks
(1)车载ATP与车载ATO系统进行周期性通信。当控制端车载ATP系统识别到车载ATO系统故障时,立即输出“紧急制动”指令,并向控制中心汇报故障信息;控制中心在行车调度工作站、车辆调度工作站和维修调度工作站上进行提示。
(2)ATP系统向行车调度工作站和车辆调度工作站发送“申请RAM模式”指令。
(3)车辆调度工作站对车辆条件是否满足要求进行判断,并将判断结果反馈给行车调度工作站。判断条件主要包括TCMS工作正常、列车上一状态为FAM模式、牵引与制动系统无中等及以上故障等。若条件不满足,行车调度则不授权进入RAM模式,ATP系统施加紧急制动且不缓解,等待人工救援;若条件满足,行车调度则授权ATP进入RAM模式。
(4)ATP系统将列车已进入RAM模式这一信息反馈至行车调度工作站,行车调度和车辆调度监控屏上应标注此列车已进入RAM模式;ATP通过硬线向TCMS发送“RAM模式启动”命令。
(5)收到“RAM模式”和“RAM模式启动”命令后,TCMS控制列车以25 km/h(可配置)的速度恒速运行,在此过程中牵引/制动指令及级位由TCMS管理。整个过程中, ATP系统对列车安全进行防护,当列车速度大于安全速度时,由ATP系统对车辆施加紧急制动指令。
(6)列车运行至下一站站外的预设RAM模式停车点时,ATP撤销“RAM模式启动”命令。此时,TCMS施加制动指令及级位(最终级位为100%),控制列车停止;满足保持制动施加条件后,若BCU未收到“保持制动施加”指令,则由BCU主动施加保持制动指令。
(7)列车停止后, ATP系统施加紧急制动不缓解。
(8)行车调度工作站派遣人员上车救援。
(9)司机或维修人员根据运营规则现场记录故障现象后,可尝试断合ATO子系统断路器,重启ATO设备。若故障消除,转为列车自动防护模式驾驶;条件满足时,升级成FAM模式;若故障仍未消除,转为人工驾驶模式,由司机驾驶进站对位停车,由控制中心行车调度工作站安排列车清客后,列车停放在存车线或返回库内。
综上所述,在新的解决方案中,当列车在区间内发生控制端ATO设备故障时,经中心授权后,列车可以进入新增的RAM模式,由车载ATP系统取代ATO系统通过TCMS控制列车运行。但是由于ATO故障导致列车进站后无法自动对位停车,所以将列车停在站外,由救援人员上车处理,故障消除后重新升级成FAM模式自动运行;或者以人工驾驶的方式进站对位停车,完成清客后,再进行后续处理。当列车在站台或场段发生控制端ATO故障,或列车发生非控制端ATO故障时,其处理方式都是需要人工救援,与既有的处理方式保持一致。
将新解决方案与既有方案进行对比,考虑最不利的情况,即假设列车控制端ATO系统发生故障时的位置恰好在两个站台区间(区间长度为5 km)的中点处。既有方案中,救援人员需从一个站台出发,步行上车(正常人步行的平均速度为5.4 km/h);本方案中,列车进入到RAM模式后,以25 km/h的速度恒速(不考虑加速/降速所需的时间)运行到下一个站台,两种方案所花费的时间分别为27.8 min和6 min。
可见,与传统方案相比,新方案中救援人员不需要前往故障发生地,只需在站台处等候,当列车到达站外停车时,即可上车救援,这样大大缩短了救援时间,提高了运营效率。
4 结语
由于FAO系统中列车不配备司机,因此对系统故障或异常的自动化处理是系统设计和功能优化的重点研究对象之一[10]。本文针对当前城轨FAO系统中列车在运营区间内出现控制端ATO系统故障导致不能维持自动运行的情况,提出在信号系统中新增RAM模式的方案。采用该方案后,控制端ATO系统发生故障的列车可经过控制中心授权进入RAM模式,由车载ATP系统通过TCMS系统控制列车自动运行到下一站外停车,从而减少救援时间,提高运营效率,提升系统的自动化水平。
猜你喜欢
防爆电机(2022年4期)2022-08-17
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2022年3期)2022-02-23
汽车维修技师(2019年7期)2020-01-16
冰雪运动(2019年3期)2019-08-23
汽车维修与保养(2019年3期)2019-06-19
高中生·青春励志(2017年2期)2017-06-09
现代兵器(2017年4期)2017-06-02
科技与创新(2016年21期)2017-02-14
价值工程(2016年36期)2017-01-11
