数据和知识驱动的城市污水处理过程多目标优化控制
2022-01-09 10:22:42韩红桂张琳琳伍小龙乔俊飞
自动化学报 2021年11期
韩红桂 张琳琳 伍小龙 乔俊飞
城市污水处理过程通过微生物吸附、分解以及 氧化等过程,将污水中的污染物去除,是维持水资源可持续利用的重要手段[1−3].近年来,随着城市污水排放量不断增加和国家排放标准的日趋严格,城市污水处理厂规模不断增容,导致城市污水处理过程运行能耗逐渐增大,且出水水质不稳定[4−6].因此,如何降低运行能耗和提高出水水质是城市污水处理过程亟待解决的问题.
为了降低城市污水处理过程运行能耗,Sun 等提出了基于活性污泥2d 模型的优化控制策略,该优化控制策略建立了能耗与化学需氧量(Chemical oxygen demand,COD)、生化需氧量(Biochemical oxygen demand,BOD)、氨氮、总氮等状态变量的关系,利用氨氮偏差计算溶解氧浓度的优化设定值[7].应用结果表明,该优化控制策略能够有效降低能耗.De Gussem 等提出了一种能耗实时优化控制策略,该优化控制策略采用活性污泥能耗模型实现能耗与城市污水处理过程运行状态之间的关系描述,并基于计算流体力学完成曝气池中叶轮开闭数量优化[8].应用效果表明,该优化控制策略可以在不影响有机物去除效率的情况下降低能耗.上述优化控制策略构建了基于机理分析的能耗目标模型描述城市污水处理过程运行能耗与运行状态变量的关系.然而,由于城市污水处理过程入水流量、入水水质等动态变化,模型精度难以保证,影响优化控制效果[9−11].因此,基于数据驱动优化目标模型的优化控制方法获得了一些学者的关注,Zeng 等提出了基于混合整数非线性规划模型的优化控制方法,该优化控制方法完成了泵送能耗与泵送速度、操作时间的动态关系表达,并采用贪婪类电磁机制算法获取最优的泵送速度和操作时间[12].仿真结果表明,该优化控制方法可以显著地降低城市污水处理过程泵送能耗.Filipe 等提出了能耗优化控制策略,该优化控制策略采用梯度增强树建立了泵送能耗与运行状态变量之间的动态关系,并基于深度强化学习实现控制变量优化设定值的求解[13].仿真结果表明,该优化控制策略可以有效节约城市污水处理过程泵送能耗.然而,城市污水处理过程出水水质也是一个重要的运行指标,如何降低城市污水处理过程能耗的同时提高出水水质是亟待解决的问题[14−16].
为了同时优化能耗和出水水质,Vega 等提出了实时优化控制策略,该优化控制策略采用实时优化算法实现溶解氧和硝态氮浓度优化设定值的求解[17].仿真结果表明,该优化控制策略能够在降低能耗成本的同时提高出水水质.Zhang 等提出了基于城市污水处理过程动态特征的优化控制方法,该优化控制方法采用动态遗传算法求解水力停留时间、内循环比等控制变量的优化设定值,并利用反向传播算法获取能耗和出水水质的权重系数[18].仿真结果表明,该优化控制方法能够有效降低城市污水处理过程能耗并提高出水水质.上述两种优化控制策略主要通过引入权重系数,将多目标优化问题转化为单目标优化问题对控制变量设定值进行求解.然而,由于城市污水处理过程运行状态难以确定,导致权重系数难以准确获取[19−20].因此,De Faria 等提出了基于档案多目标进化算法的优化控制策略,该优化控制策略能够通过Pareto 支配关系平衡能耗成本、出水水质和生命周期影响,获得合适的溶解氧浓度、外部碳源等控制变量优化设定值[21].仿真结果表明,该优化控制策略有效降低了能耗成本,提高了出水水质.Qiao 等提出了基于自适应多目标差分进化算法的优化控制策略,该优化控制策略能够获取合适的溶解氧和硝态氮浓度的优化设定值,实现了城市污水处理过程能耗和出水水质同时优化[22].另外,一些学者提出了基于多目标优化算法的优化控制方法同时优化了能耗和出水水质[23−25].然而,城市污水处理过程优化目标模型是时变的,如何获得有效的控制变量优化设定值依然是城市污水处理过程面临的挑战性问题[26].
城市污水处理过程优化控制方法主要包括以下三个过程:首先,建立运行过程目标模型,描述运行目标与系统状态变量的动态特征;其次,设计优化方法,获取控制变量优化设定值;最后,利用控制器跟踪设定值,实现城市污水处理过程优化控制[27−29].文中提出了一种数据和知识驱动的多目标优化控制(Data-knowledge driven multiobjective optimal control,DK-MOC)方法,主要贡献如下:
1) 设计基于自适应模糊神经网络(Adaptive fuzzy neural network,AFNN)的数据驱动优化目标模型,描述能耗、出水水质以及相关状态变量的动态关系.
2) 提出基于知识迁徙学习的动态多目标粒子群优化算法,将目标变化前具有较好分布性的解应用于目标变化后控制变量设定值的求解过程,并检测种群进化状态调整种群进化方向,提高种群的搜索性能,获取有效的控制变量优化设定值.
1 城市污水处理过程能耗分析
城市污水处理过程能耗主要包括泵送能耗和曝气能耗,其中,泵送能耗主要指内回流、外回流和污泥排放所产生的能耗,与泵送能耗有关的主要状态变量有入水流量、硝态氮浓度、混合固体悬浮物浓度;曝气能耗主要指控制生化反应池中的曝气过程产生的能耗,与曝气能耗有关的主要状态变量有入水流量、溶解氧浓度、硝态氮浓度、氨氮浓度、混合固体悬浮物浓度.为了实现对能耗的定量描述,文中给出基于城市污水处理过程基准仿真模型1(Benchmark simulation model No.1,BSM1)的曝气能耗计算方式[30]:

式中,AE(t)为t时刻曝气能耗,τ为计算间隔,SO,sat为溶解氧饱和浓度,Vi为第i个反应池的体积,KLai(t)为t时刻氧传递系数,溶解氧浓度可通过调整氧传递系数进行调节.泵送能耗的计算方式为
式中,PE(t)为t时刻泵送能耗,Qa(t)为t时刻的内回流量,硝态氮浓度可通过调整内回流量进行调节,Qr(t)为t时刻的外回流量,Qw(t)为t时刻的污泥排放量.
城市污水处理过程的能耗和出水水质是相互冲突的目标,同时受多个变量共同影响.为了提高城市污水处理过程出水水质,城市污水处理厂通常采用增加曝气量,延长曝气时间,调节内外回流等方式调节生化反应过程.然而,曝气量和回流流量的增加会导致能耗提高.目前,高能耗已成为制约城市污水处理厂发展的瓶颈问题,给国家能源和资源节约产生了严峻挑战.为此,城市污水处理多目标优化控制得到了广泛的研究,成为提高出水水质,降低能耗,促进可持续发展的重要技术手段.然而,在城市污水处理过程中,能耗和出水水质受入水水质、入水流量等多个变量的影响,具有动态时变特性.在动态时变环境下,如何获取合适的控制变量设定值是城市污水处理过程优化控制面临的挑战性问题.
2 数据和知识驱动的城市污水处理过程多目标优化控制
文中提出了DK-MOC 方法,主要包括以下部分:首先,建立数据驱动的优化目标模型,实现能耗、出水水质和运行状态变量之间动态关系的准确描述.其次,设计基于知识迁徙学习的动态多目标粒子群优化算法求解控制变量优化设定值.最后,采用比例积分微分(Proportional integral differential,PID)控制器跟踪优化设定值.DK-MOC 流程如图1 所示.

图1 DK-MOC 的流程图Fig.1 The flow chart of DK-MOC
2.1 运行过程目标模型构建
为了描述城市污水处理过程优化目标与系统运行状态变量之间的动态关系,文中建立了基于AFNN的出水水质和能耗优化目标模型:

式中,F(t)表示运行目标函数,EQ(t)为出水水质模型,EC(t)为能耗模型.
式中,φ(t)=[φ1(t),···,φ10(t)] 为模糊神经网络归一化层输出向量,为模糊神经网路归一化层与第q个输出连接的权重向量,当q=1 时,输出为出水水质,当q=2 时,输出为能耗.归一化层的输出为

式中,l=1,···,10 为归一化层神经元数量.φj(t)为模糊规则层第j个神经元的输出.

式中,si(t)为输入层第i个输入,µj(t)=[µ1j(t),···,µij(t),···,µ4j(t)] 为模糊规则层的中心向量,σj(t)=[σ1j(t),···,σij(t),···,σ4j(t)] 为模糊规则层宽度向量,输入向量通过主成分分析和指标可操作性确定,表示为

式中,s(t) 为t时刻模糊神经网络的输入向量,SO(t)为t时刻溶解氧浓度,SNO(t) 为t时刻硝态氮浓度,SNH(t) 为t时刻氨氮浓度,MLSS(t) 为t时刻混合固体悬浮物浓度.
为了提高模糊神经网络的自适应能力,其参数更新规则为

式 中,Θ(t)=[w1(t),w2(t),µ1(t),···,µ10(t),σ1(t),···,σ10(t)]T为参数矩阵,Φ (t) 为拟海瑟矩阵,Λ (t) 为梯度向量,I为单位矩阵,χ(t) 为自适应参数,更新方式为

δmin(t)和δmax(t) 分 别为 拟 海瑟 矩阵Φ (t) 的 最小和最大特征值,自适应参数χ(t) 满足 0<χ(t)<1 .拟海瑟矩阵 Φ (t) 和梯度向量 Λ (t) 的计算方式为

式中,eq(t) 为输出层第q个神经元的误差,Jq(t) 为雅克比矩阵.
AFNN 充分考虑了城市污水处理过程动态以及易受扰动特性,描述了出水水质、能耗以及运行状态变量之间的动态关系,基于模糊规则增加了模型的抗干扰能力.另外,模型的参数更新规则能够提高模型的自适应能力,提高模型精度.
2.2 控制变量优化设定值求解
为了降低能耗,提高出水水质,文中提出了基于知识迁徙学习的动态多目标优化算法,获取控制变量溶解氧和硝态氮浓度的优化设定值.在优化过程中,知识的表示形式为

式中,A(t)为t时刻种群初始化过程获得的知识,(t−1)为在t– 1 时刻转移的作为知识的第h个粒子位置信息,即控制变量溶解氧和硝态氮浓度的优化值,h=1,2,···,H,H为所转移的知识量.
在新优化周期开始,种群中H个粒子采用A(t)进行初始化,A(t)包括t− 1 代中Pareto 前沿上的边缘粒子和具有较强收敛性的粒子Knee points 的位置信息,剩余粒子采用如下公式分别生成

式中,xi(0) 为第i个粒子的初始位置向量,i ∈[H+1,N] ,N为种群规模,xmax=[SO,max,SNO,max] 和xmin=[SO,min,SNO,min]分别为溶解氧和硝态氮浓度的上界和下界,r1×2为分布于[0,1]的1×2 维随机向量.
为了提高多目标粒子群优化算法的搜索能力,文中基于历史信息的种群进化状态检测机制,设计自适应进化方向选择策略,平衡种群的探索和开发能力.其中,种群进化状态通过种群收敛性和种群多样性检测,种群收敛性表示为

根据种群的收敛性和多样性,文中将进化状态划分为5 个阶段,并设计自适应进化方向选择策略平衡种群的探索和开发能力,自适应进化方向选择策略如下所示:
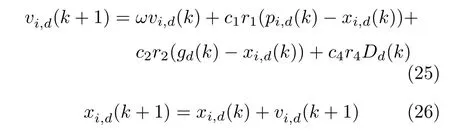
阶段1.当PC(k) −PC(k− 1) >0 且PD(k) −PD(k− 1)>0 时,种群处于进化阶段,速度和位置的更新公式为
式中,xi,d(k) 为第i个粒子在第k代的第d维位置,vi,d(k) 为第i个粒子在第k代的第d维速度,pi,d(k)为第i个粒子在第k代个体最优解的第d个维度,gd(k)为种群在第k代全局最优解的第d个维度,w为惯性权重,r1和r2为区间[0,1]的随机数,c1和c2分别为自我认知参数和社会认知参数.
阶段2.当PC(k) −PC(k− 1) <0 且PD(k) −PD(k− 1) >0 时,种群处于探索阶段,速度和位置的更新公式为

式中,r3为分布于区间[0,1]的随机数,c3为收敛性方向飞行参数,Cd(k)为第k代收敛性方向的第d个维度,表示为
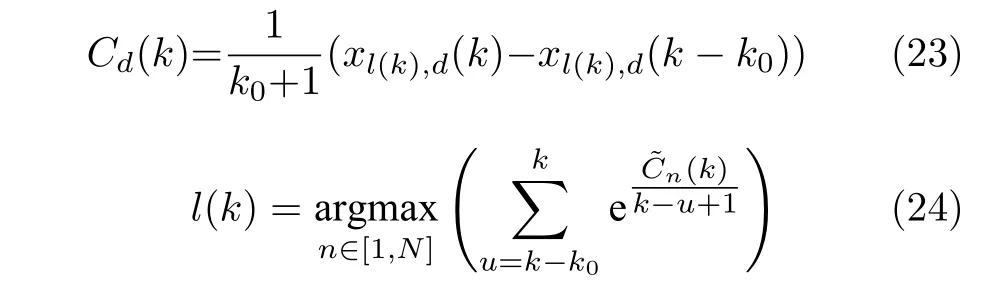
式中,l(k)表示在第k次迭代中具有最大收敛性的粒子编号.
阶段3.当PC(k) −PC(k− 1) >0 且PD(k) −PD(k− 1) <0 时,种群处于开发阶段,速度和位置的更新公式为
式中,r4为分布于区间[0,1]的随机数,c4为多样性方向飞行参数,Dd(k)表示第k代多样性方向的第d个维度,计算方式为
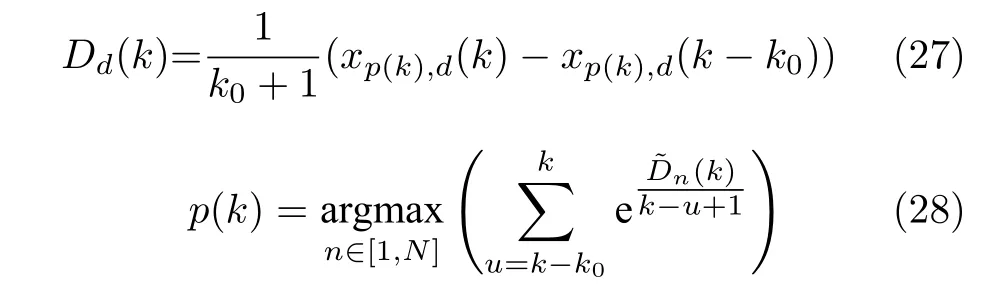
式中,p(k)表示第k次迭代中种群多样性最大的粒子编号.
阶段4.当PC(k) −PC(k− 1) <0 且PD(k) −PD(k− 1) <0 时,种群处于退化阶段,速度和位置的更新公式为
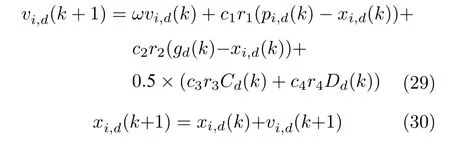
阶段5.当PC(k) −PC(k− 1)=0 或PD(k) −PD(k−1)=0 时,种群处于停滞阶段,速度和位置的更新公式为

式中,G(0,1)是一个服从均匀分布的随机值,xd,min和xd,max是第d维的最小值和最大值,pb(k)为突变率:

式中,K为种群最大迭代次数.
基于Pareto 支配关系建立的外部档案采用拥挤距离维护并选择全局最优粒子.城市污水处理过程水质达标即可排放,因此,在第K代外部档案中选择溶解氧和硝态氮浓度优化设定值时,增加决策者偏好信息,控制变量优化设定值选择对应能耗值最低的非支配解,t时刻溶解氧和硝态氮的优化设定值为SO*(K)和SNO*(K).
基于知识迁徙学习的动态多目标粒子群优化算法采用t时刻的最优粒子对t+1 时刻种群的位置进行初始化,并利用历史信息来检测种群进化状态,为种群提供不同的进化方向,提高种群的搜索能力,求解溶解氧和硝态氮浓度的优化设定值.其中,Tmax为终止时间.控制变量优化设定值的获取流程如图2 所示.
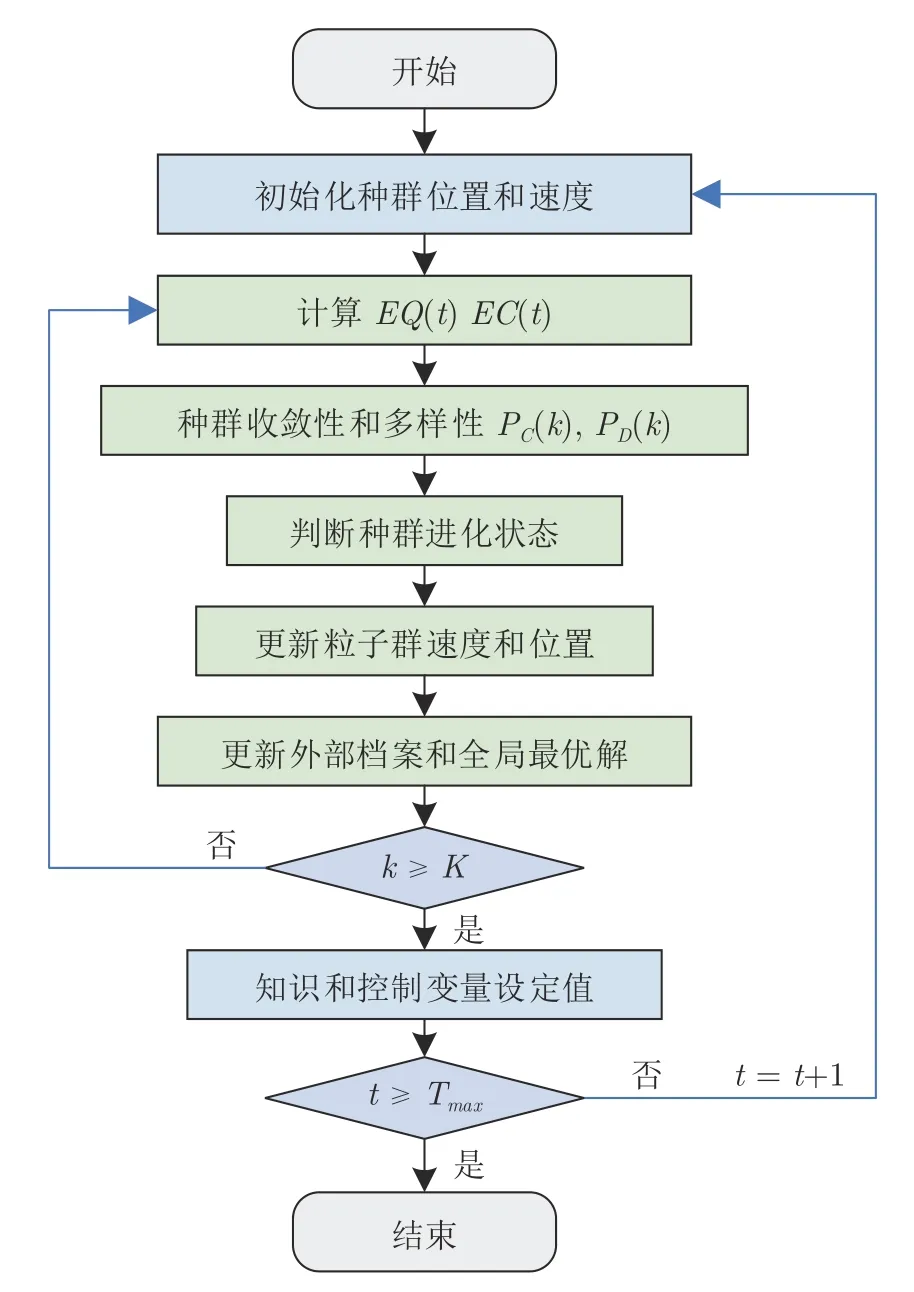
图2 控制变量设定值求解步骤Fig.2 The solution procedure of set values of control variables
基于知识迁徙学习的动态多目标粒子群优化算法的计算复杂度分析如下:假设粒子群规模为N,计算种群目标值的时间复杂度为O(MN),计算每个粒子收敛性的时间复杂度为O(N),计算每个粒子的多样性指标的时间复杂度为O(MN2),计算种群收敛性和多样性指标的时间复杂度均为O(N),粒子速度和位置更新的计算复杂度为O(N),外部档案更新的计算复杂度为O(MN2),选择全局最优解的计算复杂度为O(N),因此,基于知识迁徙学习的动态多目标粒子群优化算法的计算复杂度为O(MN2).在城市污水处理过程中,优化控制的周期一般为2 小时,因此,多目标粒子群优化算法的计算复杂度是可以满足实际应用需求的.
3 实验结果及分析
文中从优化目标模型和优化控制性能两方面验证DK-MOC 策略的有效性,采用BSM1 仿真平台作为公共验证平台,该平台是国际水协会专家提出的基于生物脱氮策略的城市污水处理过程仿真平台,主要用于城市污水处理过程控制策略的测试,能够为不同优化控制策略提供相同的测试环境,可以公平地比较不同策略的性能.而且,该平台可设置不同的实验环境,文中设置了干旱和阴雨天气两种实验环境.实验在Windows10、CPU 1.80 GHz、MATLAB 2018 上运行.为了保证评价结果的有效性,所有的实验运行30 次,取平均值作为结果.
3.1 优化目标模型性能
AFNN 与自适应核函数(Adaptive kernel function,AKF)[22,25]、遗传算法−人工神经网络(Genetic algorithm-artificial neural network,GAANN)[23]以及最小二乘支持向量机(Least squares support vector machine,LSSVM)[24]进行比较,所有模型的更新频率为15 min,训练过程中的迭代次数设置为10 次.均方根误差(Root mean square error,RMSE)和预测精度(Prediction accuracy,PA)用于评价模型的性能

式中,yi为第i次测试的实际值,为第i次测试时模型输出值,L为测试总次数.
在干旱和阴雨天气下,RMSE 和PA 如表1 和表2 所示,可以看出,在能耗和出水水质指标预测中,与AKF、GA-ANN 和LSSVM 相比,AFNN 在干旱天气和阴雨天气下具有较低的RMSE 和较高PA,说明AFNN 能够更精确地构建能耗和出水水质模型.另外,图3~ 4 给出了干旱天气下基于AFNN的能耗和出水水质建模结果.由于每日出水水质和能耗值为每日采样多次的累加和,因此,图3 和图4 的出水水质和能耗在数值上相对图5 和图6 较小.图3~ 4 的建模结果表明,所采用的AFNN 可以准确描述能耗和出水水质以及运行状态变量之间的动态关系.
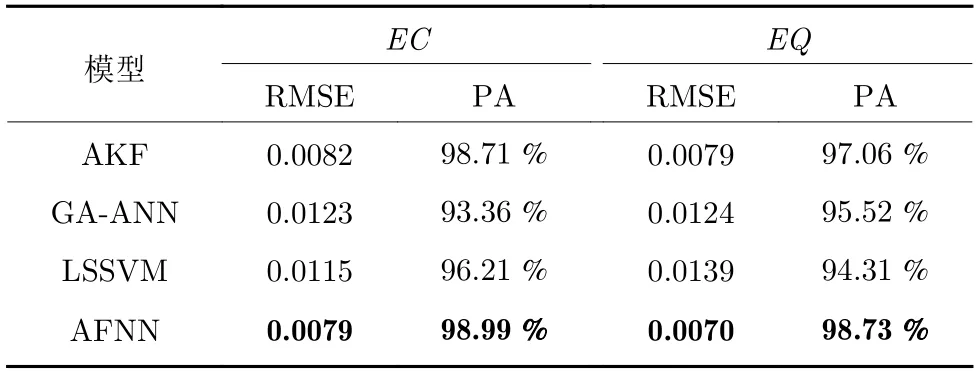
表1 干旱天气下能耗和出水水质的测量精度Table 1 The measurement accuracy of energy consumption and effluent quality in dry weather
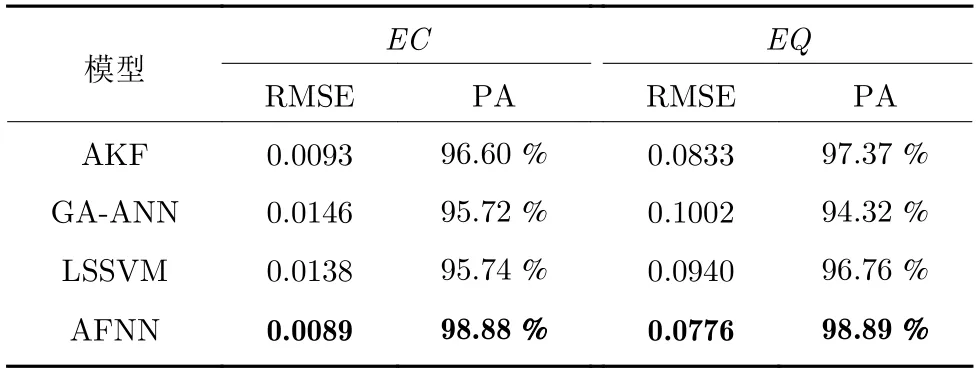
表2 阴雨天气下能耗和出水水质的测量精度Table 2 The measurement accuracy of energy consumption and effluent quality in rainy weather

图3 干旱天气下出水水质建模结果Fig.3 The modeling results of effluent quality in dry weather

图4 干旱天气下能耗建模结果Fig.4 The modeling results of energy consumption in dry weather

图5 干旱天气下平均出水水质值Fig.5 Average values of effluent quality in dry weather

图6 干旱天气下平均能耗值Fig.6 Average values of energy consumption in dry weather
3.2 优化控制性能
DK-MOC 主要包括AFNN、基于知识迁徙学习的动态多目标粒子群优化算法和PID 控制器.为了验证基于知识迁徙学习的动态多目标粒子群优化算法与PID 控制器共同构成的优化控制器的有效性,文中利用文献[23−25] 中提出的优化方法与PID 控制器共同构建优化控制器,建模方法都选择具有较高精度的AFNN.对比的优化方法主要包括非支配排序遗传算法II (NSGAII)[23]、基于聚类的多目标粒子群优化(Cluster-based multiobjective particle swarm optimization,CMOPSO)[24]和自适应多目标粒子群优化(Adaptive multiobjective particle swarm optimization,AMOPSO)[25].另外,为了验证基于多目标优化方法和基于单目标优化方法的优化控制性能,文中根据基于知识迁徙学习的动态多目标粒子群优化算法设计基于知识迁徙的动态单目标粒子群优化算法(Knowledge transferbased dynamic single objective particle swarm optimization,KT-DSOPSO),其中,出水水质作为约束,能耗作为优化目标.同时,在所有的优化控制策略中,PID 控制器的参数设置:溶解氧比例系数为20,硝态氮比例系数为10000,溶解氧积分系数为5,硝态氮积分系数为3000,溶解氧微分系数为1,硝态氮微分系数为100.在所有的优化算法中,设置种群规模和外部档案最大尺寸为40,种群迭代次数均为50.BSM1 中设置的总采样时间为14 天,优化周期为2 小时,在动态多目标粒子群优化算法中,惯性权重ω为0.7,c1、c2、c3和c4分别为2.5、2.5、0.5 和0.5,k0为4,H为8.
文中采用能耗和出水水质两个指标对优化控制策略的性能进行验证,能耗值低说明优化控制过程中产生较少的能耗.根据国际污水排放检测标准,出水水质采用出水中氨氮、总氮、悬浮物、COD、BOD 的浓度计算,浓度越低,水质越好.干旱天气下平均每天的出水水质和能耗表示如图5~ 6 所示.为了描述DK-MOC 的优化控制性能,图7~ 8 给出了干旱天气下溶解氧和硝态氮浓度的优化设定值和跟踪值,可以看出,所提出的优化算法可以获得动态的控制变量优化设定值,使用PID 可以跟踪变化的优化设定值.根据图9 所示,干旱天气下溶解氧和硝态氮的平均跟踪误差为SO<0.5 mg·L−1,SNO<0.2 mg·L−1,结果表明,在DK-MOC 策略中,PID能较好地跟踪SO和SNO的优化设定值,保证了跟踪控制的有效性.
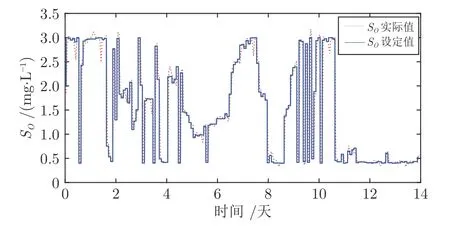
图7 干旱天气下溶解氧浓度跟踪性能Fig.7 Tracking performance of SO in dry weather
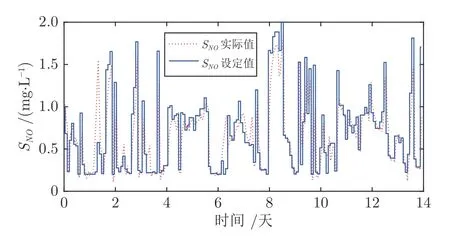
图8 干旱天气下硝态氮浓度跟踪性能Fig.8 Tracking performance of SNO in dry weather

图9 干旱天气下硝态氮和溶解氧浓度跟踪误差Fig.9 Tracking errors of SNO and SO in dry weather
为了精确描述DK-MOC 性能,表3 给出了DK-MOC 的出水水质的组分结果,SNH表示氨氮浓度,Ntot表示总氮浓度,TSS 表示悬浮物浓度,表4给出了不同优化控制策略在干旱和阴雨天气下的能耗和出水水质结果,由表3~ 4 可以看出,在干旱天气下,DK-MOC 的TSS、COD 和BOD 浓度均远小于排放标准.虽然SNH、Ntot接近排放标准,但所有的水质指标都达标,且其总出水水质指标优于其他优化控制策略;在阴雨天气下,DK-MOC 的SNH浓度为3.89 mg·L−1,Ntot浓度为17.01 mg·L−1,水质指标均达标,且运行能耗具有最小值.另外,DKMOC 与基于KT-DSOPSO 的优化控制器对比,可以看出,所提出的基于知识迁徙学习的动态多目标粒子群优化方法可以权衡能耗和出水水质的关系.结果表明,DK-MOC 可以通过获取动态优化设定值,有效降低能耗,提高出水水质.
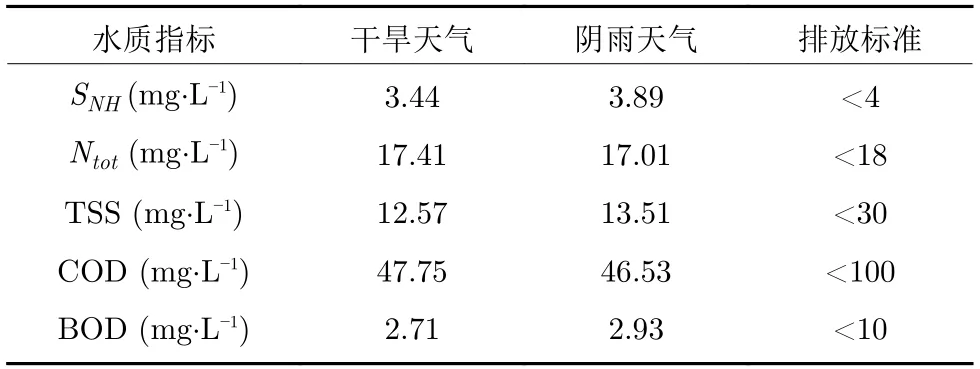
表3 DK-MOC 的出水水质结果Table 3 Effluent quality results obtained by DK-MOC

表4 不同优化控制策略的比较结果Table 4 Comparison results of different optimal control strategies
4 结论
文中提出的DK-MOC 方法主要包括以下优点:
1) 设计数据驱动的城市污水处理过程多目标优化模型,实现运行状态变量与出水水质、能耗之间的动态关系的准确描述.
2) 提出了基于知识迁徙学习的动态多目标粒子群优化算法,通过知识迁徙学习和自适应进化方向选择策略提高种群搜索性能,从而获取有效的优化设定值.
BSM1 平台的测试效果显示:与其他建模方式相比,AFNN 可以提高出水水质和能耗模型精度;与一些优化控制策略相比,所提出的DK-MOC 方法可以获得有效的控制变量优化设定值,提高了出水水质,降低了能耗.结果证明了DK-MOC 方法的有效性.
猜你喜欢
云南化工(2021年6期)2021-12-21 07:31:10
湖北农机化(2021年7期)2021-12-07 17:18:46
科学与信息化(2020年11期)2020-06-19 08:50:42
智能城市(2018年8期)2018-07-06 01:11:10
现代园艺(2018年2期)2018-03-15 08:00:39
中国资源综合利用(2017年4期)2018-01-22 02:46:38
计算机测量与控制(2017年6期)2017-07-01 16:24:28
水利科技与经济(2017年6期)2017-04-28 08:30:14
自动化仪表(2015年5期)2015-06-15 19:01:34
汽车维修与保养(2015年6期)2015-04-17 03:31:40