计算机导航系统辅助全膝关节置换术治疗膝关节骨性关节炎的早期疗效
2022-01-08 09:11朱云森张维康莫挺挺张江南
临床骨科杂志 2021年6期
张 波,江 敞,朱云森,张维康,莫挺挺,李 俊,张江南
全膝关节置换术(TKA)是治疗终末期膝关节骨性关节炎(OA)的有效手段,能够矫正畸形,减轻关节疼痛,改善膝关节的活动功能。TKA的成功取决于很多因素,其中最重要的因素是精确的力学对线和良好的软组织平衡。传统TKA术中通过髓内和髓外定位做股骨远端、胫骨近端截骨,不可避免地存在误差。随着计算机导航系统辅助TKA的应用,术中假体安放精确性得到提高[1]。本研究选取2018年1月~2019年6月我科行TKA治疗的40例膝关节OA患者资料,比较计算机导航辅助技术(iASSIST系统)和传统术式的疗效,报道如下。
1 材料与方法
1.1 病例资料将40例膝关节OA患者根据治疗方法不同分成导航组(采用计算机导航系统辅助TKA治疗,20例)和传统组(采用传统TKA治疗,20例)。① 导航组:男12例,女8例,年龄59~81(73.27±5.62)岁;体重指数19.6~26.2(22.06±3.17)kg/m2;髋-膝-踝角(HKA)170°~195°(186.5°±8.1°);膝关节外翻3例,内翻17例;伴骨质疏松3例。② 传统组:男10例,女10例,年龄64~83(72.44±6.29)岁;体重指数 20.7~27.5(23.32±2.82)kg/m2;HKA 173°~197°(184.8°±7.4°);膝关节外翻1例,内翻19例;伴骨质疏松2例。两组术前基本资料比较差异无统计学意义(P>0.05)。手术由同一组医师完成,均采用Nex-Gen LPS高屈曲型膝关节假体(Zimmer)。
1.2 手术方法腰硬联合麻醉。膝关节前正中切口,髌骨旁内侧入路。
1.2.1导航组 iASSIST系统由4个具有微小加速度计的感应器(Pod)、配套工具以及便携式平板计算机组成。术前先进行器械注册,确定患者肢体侧别,输入预期的“胫骨后倾角度”和“股骨屈曲角度”,认证完成后开始手术。插入iASSIST定位杆,把股骨基准固定于股骨远端,按压Pod“Z”按钮,启动注册程序(见图1A),通过加速和停止下肢活动,采集13个稳定的位置信息,系统确定股骨旋转中心从而确定股骨机械轴,采集系统反馈,完成股骨注册。将股骨调整装置安装到股骨基准的前侧,按照连接在股骨远端截骨导向器上Pod的反馈(红色和绿色LED),通过金色和绿色螺钉分别调整屈曲、伸直、内翻、外翻角度以及截骨深度,滑动股骨调整装置至完全卡座在最远端髁上,用固定钉固定股骨锯切槽,再次确认屈曲、伸直、内翻、外翻角度及截骨深度与预期目标一致后,进行股骨远端截骨(见图1B)。将安装单独定位传感器的验证工具固定到股骨远端的截骨面上(见图1C),使下肢分别处于外展、内收、中立位完成位置信息采集,可验证截骨深度及屈曲、伸直、内翻、外翻角度的准确性,提高截骨的精确性。安装胫骨对线导向器,根据内外踝中点、胫骨平台髁间嵴中点确定胫骨机械轴(见图1D)。设置旋转角度,调整定向机械轴,连接胫骨定位器和胫骨调整装置,按压Pod“Z”按钮,交替变换下肢外展、内收、中立位,根据系统反馈完成胫骨注册。胫骨机械轴由胫骨平台髁间嵴中点和内外踝中点确定,按照连接在胫骨调整装置上Pod的反馈信息(红色和绿色LED),分别通过金色和绿色螺钉调整屈曲、伸直、内翻、外翻角度,在定位传感器实时反馈的辅助下完成胫骨近端截骨和验证(见图1E、F)。截骨完成后,伸直膝关节,连接eLIBRA张力测试系统的感受器(见图1G),通过感受器上显示的数值直接判断内外侧间隙的张力,如内外侧数值不等,对软组织进行适当的松解,直至内外侧间隙的张力相等,达到伸直间隙的平衡。膝关节屈曲90°,连接eLIBRA张力测试系统的感受器(图1H),选择合适大小的垫片,通过调整外旋使内外侧数值相等,达到屈曲间隙的平衡。进行假体试模,彻底冲洗,安装膝关节假体。放置1根引流管,逐层缝合切口。
1.2.2传统组 采用传统的标准TKA术式,髓内定位法定位股骨机械轴,调整截骨角度和截骨量,采用平行后髁连线的四合一截骨板,参照股骨髁间线或股骨滑车中轴线行股骨四合一截骨和髁间截骨。胫骨侧采用髓外定位法,调整内外侧截骨量,松解挛缩的软组织,调整内外侧间隙的平衡,试模以达到软组织平衡及内外翻稳定,恢复下肢机械轴线,最后置入膝关节假体。术中除定位、截骨、间隙张力测试不采用导航设备辅助外,其余操作同导航组。
1.3 术后处理患肢弹力绷带包扎、冰敷,膝下放置软垫预防腓总神经压迫损伤,进行预防感染、镇痛、低分子肝素预防血栓等治疗。术后24 h拔除引流管。两组麻醉作用消失后即开始指导患者行股四头肌等长收缩训练及屈膝功能训练,48 h后下地部分负重,术后1周完全负重行走。
1.4 观察指标① 手术时间,术中出血量,术后引流量。② 术前及术后1周、2周、3个月膝关节活动度。③ 术后3个月行下肢负重全长位X线和膝关节X线检查,测量冠状面HKA、冠状面股骨组件角(FFC)、冠状面胫骨组件角(FTC)、矢状面股骨组件角(LFC)、矢状面胫骨组件角(LTC),见图2;比较两组实际测量值与理想状态下的180°HKA、90° FFC、 90° FTC、87° LFC、83° LTC的偏差值。
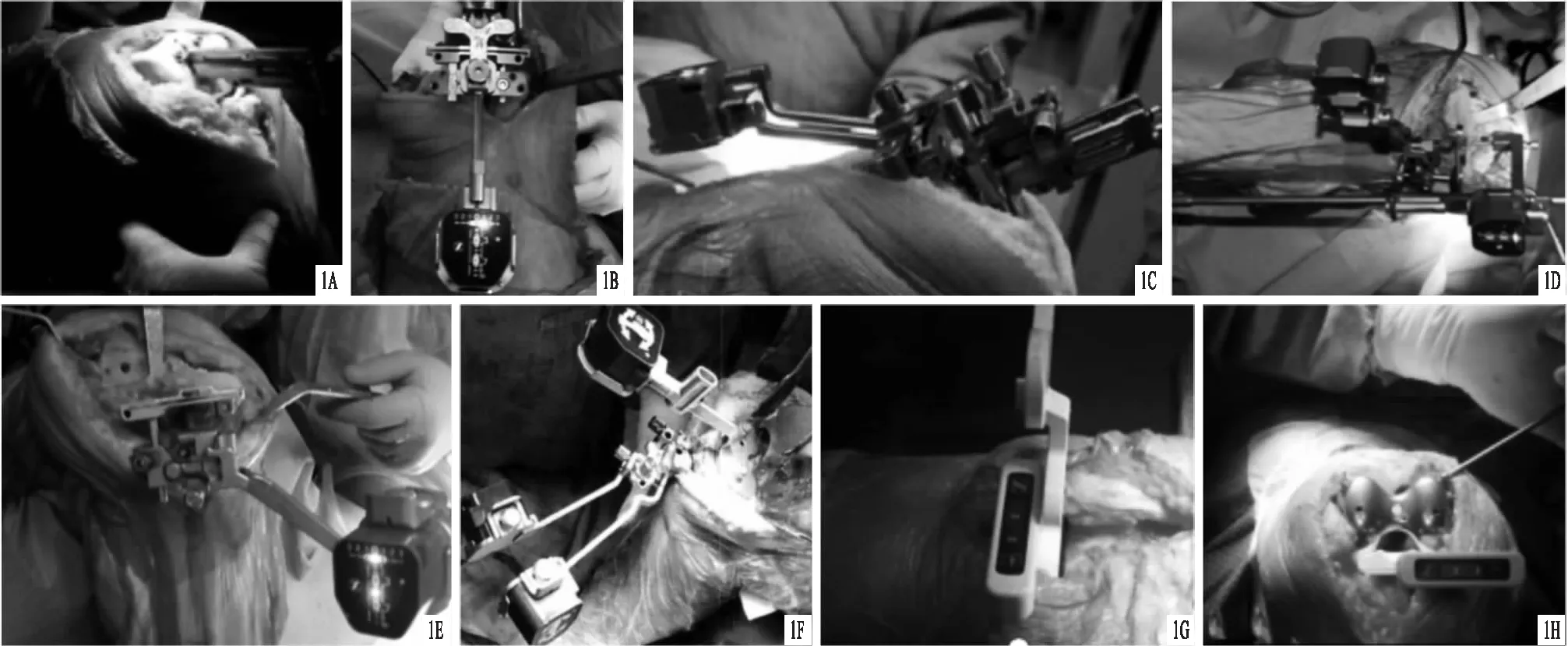
图1 计算机导航系统辅助TKA手术过程 A.股骨注册;B.股骨远端截骨;C.股骨远端截骨验证;D.胫骨注册;E.胫骨近端截骨;F.胫骨近端截骨验证;G.伸直间隙eLIBRA张力测试;H.屈曲间隙eLIBRA张力测试

图2 TKA术后影像学测量 A.HKA为股骨头中心、膝关节中心和踝关节中心三点连线的夹角,FFC为股骨假体内外髁关节面连线和膝关节中心与股骨头中心的连线的夹角,FTC为胫骨假体关节面内外侧连线和膝关节中心与股骨头中心的连线的夹角;B.LFC为股骨机械轴和矢状面股骨假体内外髁关节面的夹角,LTC为胫骨机械轴和矢状面胫骨假体关节面的夹角

2 结果
患者均获得随访,时间3~12个月。
2.1 两组手术情况比较见表1。手术时间导航组长于传统组,术中出血量、术后引流量导航组少于传统组,差异均有统计学意义(P<0.01)。

表1 两组手术情况比较
2.2 两组术后3个月各角度偏差比较见表2。术后3个月测量计算各角度偏差值,HKA、FFC、FTC、LFC、LTC的偏差值导航组均小于传统组,差异均有统计学意义(P<0.05)。
2.3 两组膝关节活动度比较见表3。膝关节活动度两组术前比较差异无统计学意义(P>0.05),术后1周导航组大于传统组(P<0.01),术后2周、3个月两组比较差异均无统计学意义(P>0.05)。
2.4 两组典型病例见图3~6。

表2 术后3个月两组各角度偏差比较
表3 两组膝关节活动度比较
3 讨论
3.1 本研究结果分析术中出血量和术后引流量导航组少于传统组,术后1周膝关节活动度导航组大于传统组,这与计算机导航系统辅助TKA术中采用股骨髓外定位密切相关,减少了髓内定位所导致的出血,软组织剥离少,手术创伤减少,有利于患者术后膝关节功能的快速康复[2]。术后2周、3个月膝关节活动度两组比较差异均无统计学意义,这可能是由于iASSIST系统是在手术期间提供准确的对准信息,并没有从根本上改变常规TKA的实际手术程序,两组的手术技术和使用假体是相同的。导航组术后3个月HKA、 FFC、FTC、LFC、LTC更接近于理想的目标值,偏差值小于传统组。传统TKA主要通过术前X线片等影像学资料[3-4]、术中髓内髓外定位装置以及术者的临床经验等多种因素决定TKA术中的截骨厚度和角度、假体型号的选择,由于膝关节解剖与生物力学环境复杂以及患者的个体差异大,依赖经验及肉眼观察定位的方式和机械定位系统固有的精度局限性限制了手术的准确性,不可避免地存在误差,很难实现高精度和个性化治疗[5-6]。Kinney et al[7]研究发现,与传统术式相比,在TKA中使用iASSIST系统可改善术后机械轴的精确性并减小误差。程国芳 等[8]研究表明,计算机导航系统辅助TKA能提高下肢力线的精准度,提高膝关节假体安放的准确性,近期临床效果较非导航手术更有优势。
3.2 计算机导航系统辅助TKA对关节功能的影响计算机导航系统辅助TKA能否有效改善膝关节功能及提高假体寿命仍存在很多争论。Li et al[9]研究表明,与传统的TKA相比,iASSIST系统显著提高了下肢力线的准确性,但手术时间延长了,就短期膝关节KSS功能评分而言,没有明显的优势。计算机导航系统带来的更加精确的下肢机械轴和假体位置并未显著改善膝关节功能,笔者认为原因如下:① 摄片和测量存在误差。尽管严格执行了放射照相协议,标准化的下肢负重位全长X线片被用于评估机械轴和假体位置,但误差仍不可避免。虽然计算机导航辅助TKA比传统的TKA具有更精确的力线对准,但改善力线精准度的程度就存在摄片和测量误差[10]。② 随着人工关节外科学的发展,假体更好的摩擦学特性、改进的植入物设计和手术技术的进步,大大减少了与假体位置不良相关的不良临床结果。③ 计算机导航系统有一定的学习曲线,初学者对计算机导航系统相对生疏,削弱了计算机导航系统定位上的优势,从而影响到最终的研究结果。
尽管存在争议,但中性的机械轴仍然是目标对准的“黄金标准”,并得到大量数据的支持[11]。有研究[12]表明,下肢机械轴偏离中性角度达 3°是假体生物力学耐受的重要临界值,下肢机械轴偏离中性角度>3°,假体松动率大大提高。目前大部分研究只评估计算机导航系统辅助TKA对膝关节功能的早期影响,其远期影响需要大样本临床资料为基础的进一步研究分析。因此,术后下肢对准与术后功能和假体寿命之间的关系还需要更多的长期随访研究。
综上所述,计算机导航系统延长了手术时间,短期对关节活动度的改善没有明显的优势,但能提高TKA下肢机械轴和假体安装的准确性,减少术中出血,远期结果需进一步随访。本研究局限性:① 评估静态下的冠状和矢状平面对准,并没有评估动态下旋转或步态对于对准的影响;② 没有评估完整的临床结果,例如疼痛、膝关节评分等;③ 由于导航设备的昂贵稀缺,技术的学习曲线较长,难以大范围推广,研究的样本量偏小。

图3 患者,男,71岁,左膝关节OA伴内翻畸形,采用计算机导航系统辅助下TKA治疗 A.术前左膝正、侧位及下肢全长X线片,显示左膝OA,关节退变严重,轻度内翻畸形,内侧间室狭窄;B.术后1周正、侧位X线片,显示假体位置良好,内侧间室狭窄及内翻畸形得到矫正;C.术后3个月下肢全长X线片,显示下肢力线恢复良好,内翻畸形已纠正 图4 患者,女,59岁,左膝关节OA伴内翻畸形,采用计算机导航系统辅助下TKA治疗 A.术前左膝正、侧位及下肢全长X线片,显示左膝OA较重,大量骨赘形成,内翻畸形较严重;B.术后1周正、侧位X线片,显示假体位置良好,骨赘清除,内翻畸形已矫正;C.术后3个月下肢全长X线片,显示内翻畸形已纠正,下肢力线恢复良好 图5 患者,女,67岁,右膝关节OA,采用传统TKA治疗 A.术前右膝正、侧位及下肢全长X线片,显示右膝重度OA,关节严重退变,大量骨赘形成,内侧间室狭窄,内翻畸形严重;B.术后1周正、侧位X线片,显示假体位置良好,骨赘清除,内侧间室狭窄、内翻畸形得到矫正;C.术后3个月下肢全长X线片,显示下肢力线恢复良好,内翻畸形已纠正 图6 患者,女,74岁,左膝关节OA伴内翻畸形,采用TKA治疗 A.术前左膝正、侧位及下肢全长X线片,显示左膝退变严重,骨赘形成,内侧间室狭窄,内翻畸形严重;B.术后1周正、侧位X线片,显示内翻畸形、内侧间室狭窄得到矫正;C.术后3个月下肢全长X线片,显示下肢力线恢复良好,内翻畸形已纠正
猜你喜欢
人人健康(2022年4期)2022-11-25
临床骨科杂志(2022年4期)2022-11-24
临床骨科杂志(2022年3期)2022-11-24
基层中医药(2022年1期)2022-07-22
临床骨科杂志(2022年3期)2022-06-23
中国典型病例大全(2022年11期)2022-05-13
临床骨科杂志(2022年2期)2022-05-10
锦州医科大学报(2022年2期)2022-05-07
中国典型病例大全(2022年7期)2022-04-22
中国骨与关节杂志(2021年5期)2021-05-29