多海域自适应三体无人监测船概念设计
2022-01-08 11:37岳玉帅尚朝阳
船舶标准化工程师 2021年6期
岳玉帅,张 航,白 旭,尚朝阳
(1. 沪东中华造船(集团)有限公司,上海 200129;2. 江苏科技大学 船舶与海洋工程学院,江苏镇江 212003)
0 引言
随着人们对海洋可活动领域的不断开阔及对国家管辖海域应用需求的增大,保证我国南海区域的领土完整和资源开采任务的有序进行是新时代海洋强国战略的重要环节。南海作为中国三大边缘海之一,具有丰富的油气资源。然而,南海区域面积宽广,各国海域的界限难以明确的划分,以至于周围邻国常做出“越界”举动。加之南海海况复杂,常规的舰船巡视往往效率不高,为保证资源开采的有序进行和维护国家主权的权益不受侵犯,越来越多的现代化设备开始投入到南海的建设当中。其中,无人水面船(Unmanned Surface Vessel,USV)以其速度快、体积小和安全等优点正逐步在应用于民用和军事领域,配合陆上基地和载人舰队执行一系列的海上监测任务,将是对我国南海安全的有力保护措施。
本文将以南海为背景,对工作海域和技术要求进行研究,设计了一种多海域自适应三体无人监测船,该船可根据海域环境的变化调整主体与侧体相对位置以获得优秀的阻力和耐波性能。
1 概念探索
1.1 开发背景
设计船的工作环境为我国南海。南海海域具有范围广、大风浪和多岛屿的特点。该海域自然海域面积约350万平方公里,为中国近海中面积最大的海区。由于其面积之宽广,又处于热带和亚热带地区,以至于南海各部分区域的风浪条件在空间分布上不尽相同。图1展示了西北太平洋海域2005年非台风过境情况下的波高极值。另外受交替季风和应季节兴起的猛烈台风的影响,不同区域在时间上也有很大差异。因此,这要求设计船应具有较强的海浪自适应能力,当航行至不同区域时,仍能高效地在目标海域进行工作。
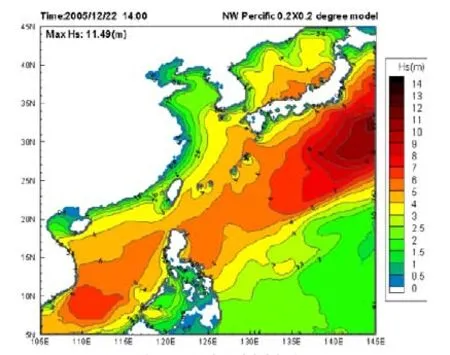
图1 西北太平洋波高极值图
三体船作为一种较新型船型,近年来备受关注。图2为英国“海神”号三体舰船,细长的船体使其具有良好的阻力性能,通过调整侧体与主体之间的纵向和横向布局,可获得在不同航速下最有利的兴波干扰。试验表明:相较于等效单体船型,三体船可减小20%的剩余阻力,侧体的设置可有效弥补湿面积增加带来的摩擦增阻。此外,侧体为三体船提供了良好的稳定性,相比常规单体船舶,可提高在更高等级海况下的耐波性能。

图2 英国“海神”号
然而,现有的三体船主体和侧体位置固定,无法根据实际情况调整三者间的相对距离。研究表明:在不同航速下得到的三体船优化侧体布局有很大的差别,固定的侧体布局难以得到高速和低速时最好的阻力和耐波性能。因此,若三体船可根据海域情况改变侧体布局,则可对目标海域进行更高效和安全地监测。
1.2 技术指标
本文按照中国船级社2015年发布的《智能船舶规范》,参考英国劳氏船级社三体船规范《The Rules for the Classification of Trimarans》对无人监测船进行设计。当代先进的高速三体船和海上巡视船的设计特点对本船具有如下主要性能要求:
1)排水量:50吨级。
2)航速:最大航速在35 kn以上,续航力约 2 000 n mile。
3)适航性:4级海况下正常工作,最高可抗8级海况。
4)搭载可改变主体和侧体相对位置的液压装置和可根据实际工作环境调整位置的自适应系统。
5)搭载锂电池和太阳能电池板系统,动力系统为油电混合。
6)具备一定的监测能力,搭载先进视频和音频的实时传输系统,配合北斗导航系统,做到陆地和监测船的实时数据互传。
7)具备一定的智能航行能力,可侦测和规避水下岩礁风险,并有良好的直航和回转性能。
8)配备一个应急驾驶舱和一个应急船员舱室。
2 无人船的船型研究
2.1 主尺度
本文采用船舶总体设计中的母型设计法,经过调研,统计现有三体船船的主尺度以及主体和侧体间的尺度关系,运用统计方法归纳出三体船的主要尺度范围,见表1。

表1 现有三体船尺度比范围
除了得到主尺度主要范围之外,本文也参考了由新西兰 Calibre Boats船厂建造的穿浪三体船“Earthrace”号(见图 3)和上海交通大学开发的高速、高耐波系列船型中的高速穿梭艇三体船型(High Speed Trimaran Shuttle Vessel of SJTU,SV-SJTU-T,见图4)。其主尺度要素见表2。

图3 “Earthrace”号穿浪三体船
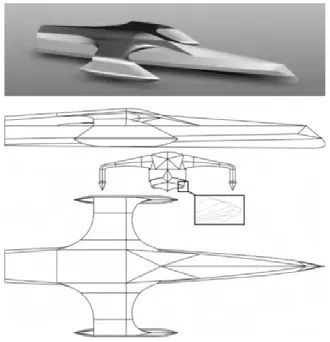
图4 SV-SJTU-T号高速穿梭艇

表2 优良母型船主尺度要素
综合三体船统计数据确定的尺度比主要范围和两艘母型船的具体主尺度要素,根据设计船的实际布置需要,初步确定本监测船的主尺度方案,见表3所示。

表3 三体无人监测船主尺度方案
2.2 型线设计
船舶型线的优劣与否,将对船舶的力学性能、总布置设计、结构强度、建造工艺及成本把控等方面均产生影响。常采用的方法有自行设计法、母型改造法、系列船型法和数学船型法。由于设计船的特殊性,本文将采用自行设计法,主体型线参考“SV-SJTU-T”号高速穿梭艇的型线进行设计,得到无人监测船主体的典型横剖面图及主体几何模型图,分别见图5和图6。
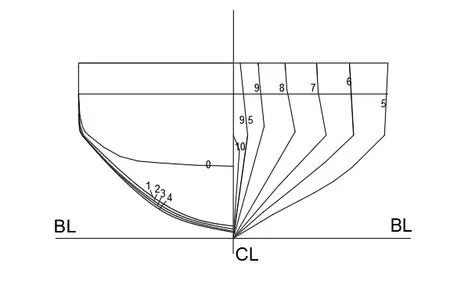
图5 主体典型横剖面图

图6 主体几何模型
考虑到南海海域的波高通常在1.5 m左右,而设计船设计吃水为 1.4 m,故主体采用穿浪船型,船体细长和船艏瘦削,面对较大波高的海浪时,能够直接穿过波浪而不是像传统深V型滑行艇那样在波浪上跳跃,减少波浪冲击载荷,获取在波浪中优异的快速性和适航性。采用内倾式船首,使监测船拥有更好的隐身性能。船舶首部横剖面设计为V型,尾部采用巡洋舰尾,提高水动力特性和改善耐波性。设计船主体还设置了压浪板(见图6),缓解船舶淹的问题。
高速三体船的阻力成分复杂,对于侧体而言,合理的侧体布局和船体型线很大程度上决定了三体船的兴波阻力。参考母型船,设计得无人监测船侧体的典型横剖面图及主体几何模型图见图7和图8。
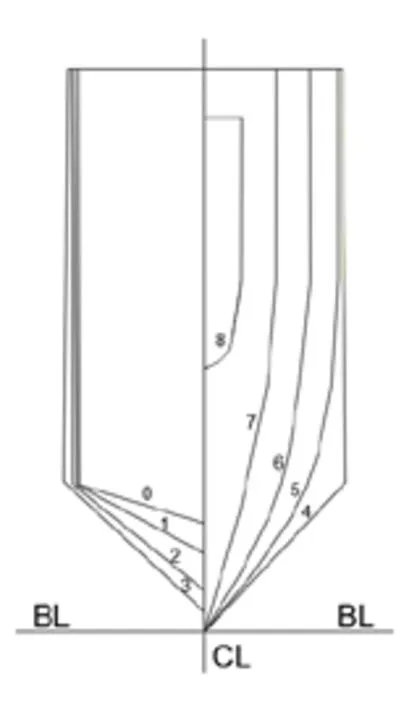
图7 侧体典型横剖面图

图8 侧体几何模型
侧体的D
/B
较大,故采用深V型横剖面设计。深V型船体以最小限度地牺牲静水中的快速性来换取耐波性能大大地改善。船舯底升角设计为 40°。研究表明,深V形船型的有效功率P
、剩余阻力系数C
与船舯底升角β
近似成线性关系,并随β
增大而单调下降。由于设计船需具备多海域自适应功能,侧体的吃水将会随着实际工作环境而改变。2.3 总布置设计
设计船主体的建筑主要由主船体和上层建筑构成,主甲板以下的部分称为主船体,主甲板以上的围壁结构称为上层建筑。考虑到本船的尺度和工作海域的海况,加之无人船的设备多为精密仪器,需尽量保持干燥,故本船将不设置干舷,主甲板以上为均为围壁结构。设计船的整体三维效果图,见图9。
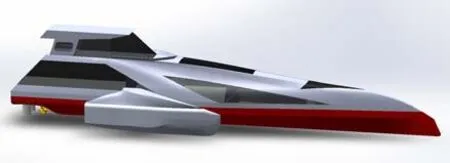
图9 无人监测船整体外观三维图
除了主甲板外,设计船还设置了一个应急操作平台,若有需要,本船也可改为手动驾驶,提高了设计船的可靠性。根据各个设备的布置要求和对全船的重量重心评估后,将设计船按功能划分了若干的舱室。总布置见图10。
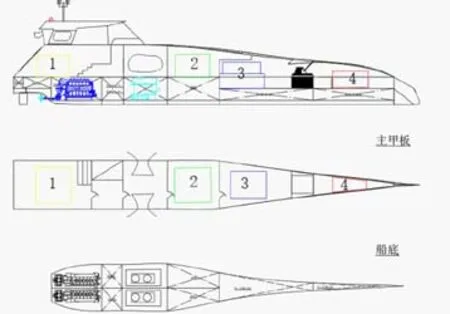
图10 无人监测船总布置图
在图10中,将设计船划分出4个装载区域,各区域的设备的装载如下:
1)1区域:视频信号发射器、音频信号发射器/接收器、应急救生设备。
2)2区域:核心控制器、组合导航、应急操作系统。
3)3区域:减摇器、陀螺仪。
4)4区域:激光测距传感器、声纳、多普勒速度仪。
2.4 连接桥设计
本船连接桥内部设计为桁架结构,保证了在高等级海况下所能承受载荷的强度。当船舶根据航行海域条件和性能的要求,需对侧体位置进行调整时,电动液压杆顶推桁架,使桁架绕传动轴完成定轴转动,使侧体横向位置的缩小,并减少侧体吃水。反之,若需横向位置增大、吃水增加,则收缩电动液压杆完成调整。连接桥内部结构见图11。
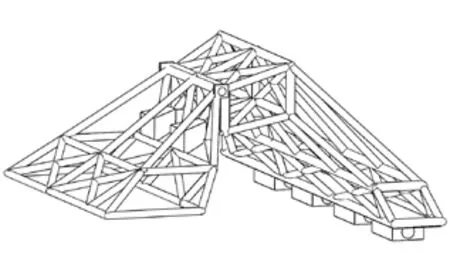
图11 三体船连接桥内部结构
3 无人船功能模块设计
由于无人监测船对个模块和硬件设备的要求较高,且需要保证各功能性设备的正常高效运作,减少控制器模块和设备的转换。设计船将选用可编程自动控制器(Programming Automatic Controller,PAC)作为核心控制器。
根据船上设备特征和功能特性,将无人船分为6大系统,分别是控制系统、推进系统、避障系统、应急系统、通讯系统和供电系统。各系统间的智能控制关系图如图12所示。
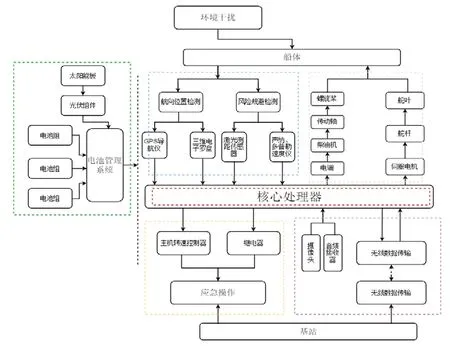
图12 无人监测船智能控制关系图
控制系统,即核心处理器,可以使用图形用户界面(GUI)接收的参数预编程或通过基站操纵杆手动命令。它与其他五个系统之间相互配合,保证设计船的正常航行。比如,它可以接收来自电池管理系统的能量消耗数据,并且如果已经消耗的能量达到指定阈值,则发出相对信号给电调,控制主机的运行,限制船舶的速度。这样,船舶就可以可以限制其最大速度以消耗更少的能量,以便在保持通信功能完整的同时完成操纵。
推进系统,将包含对柴油机的控制和对舵机的控制两部分。对前者的控制,需要搭配电调(柴油机驱动模块),从而实现对冲程的进油和紧急情况下的螺旋桨倒转刹车。
避障系统,它保障了船舶能在预设的航行线路安全航行。该系统的航向位置监测配合GPS导航仪,并使用多普勒速度记录仪(Doppler Velocity Log,DVL)、电子罗盘和惯性测量单元(Inertial Measurement Unit,IMU)等设备,计算并估计无人船在预编程序下的轨迹路线。而当声纳、超声波等传感器检测到前方有障碍物体时,它将启动风险规避功能,将相关信息发送给核心处理器,该信息可用于采取立即停止船舶等措施,以避免与船只和浮动结构发生碰撞。
应急系统,设计船在大海中航行,所面对的风险都是来自各方面的,应急系统所要做得是在遇到危险,能尽可能的建设损失。无人船的应急系统设计需在以下情况下,完成应急操作。
1)船舶进水时,切断相关仪器的电源,启动船舶进水状态下的应急情况并向基站发出求救信号。三体船船首和船尾各设置一个水浸传感器,时刻监测主体内可能存在的进水问题。
2)核心控制器中出现严重运算错误,如控制器发出错误指令等严重错误,核心控制器将主动停止任务并向基站发出求救信号,直到错误修复为止。
3)当设计船偏离了预定航线并驶出了预设的最大可活动范围时,应急系统将直接控制主机,令船舶停止航行。
通信系统,无人船将搭载2.4 G无线模块,采用NRF24L01芯片,其通过SPI与外部MCU通信,最大的SPI速度可以达到10 MHz。这样将保证无人船将监测画面实时、高效地传递给基站,基站的指令也可更快速的到达。
供电系统,无人船采用油-电混合的动力系统,其电能由冗余式电源系统提供,该电力系统由并联连接并分布在两个侧船体上的独立电池组构成。并通过位于每个侧体中的电池管理系统,确保每个组的安全连接和各单元的参数的监控。电池管理系统也将实时向核心处理器反应电池消耗情况。
4 无人船总体性能研究
4.1 完整稳性
船舶稳性即船舶在外力作用下发生倾斜而不致倾覆,当外力作用消失后仍能回复到原来平衡位置的能力,是保证船舶安全的一项重要性能。对于三体船,它是通过大长宽比的三个船体来有效减小兴波阻力,但由此将会带来稳性损失,这就需要两侧片体来弥补。因此,三体船的稳性计算会区别于常规的单体船。
完整稳性包括初稳性和大倾角稳性,文献[6]详细研究了三体船完整稳性的计算方法。经计算,本文设计船在侧体间距d=2.5 m时,初稳性高度GM=1.647 m,复原力臂GZ随横倾角的变化趋势见图13。
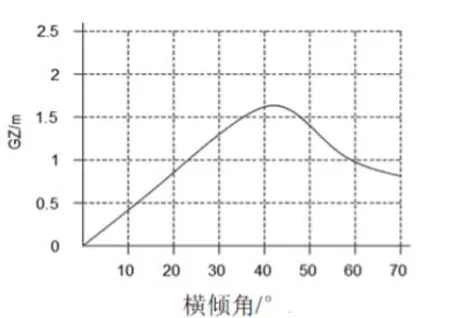
图13 三体船复原力臂GZ曲线
4.2 稳性衡准校核
经查验,设计船满足国际海事组织(International Maritime Organization,IMO)制定的《2002年国际高速船安全规则》对海上高速船和多体船的稳性要求,检验项目包括GZ
曲线的面积、GZ
值和GM
值。根据规范校核稳性衡准表见表4。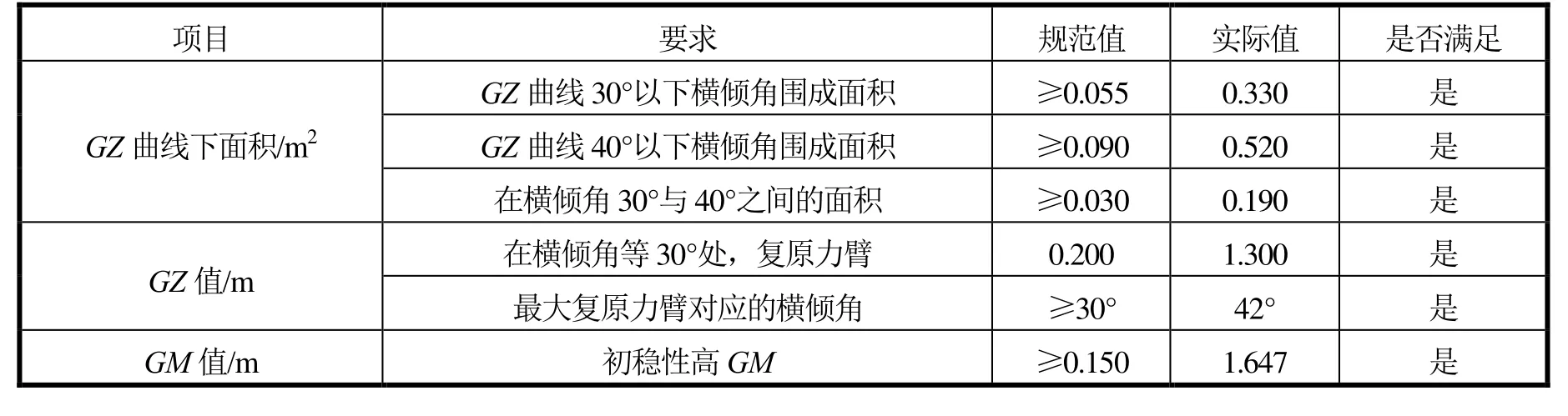
表4 根据规范校核稳性衡准
由表4可知,在该设计方案下的三体无人监测船完全满足目前规范对稳性的要求,并且各项稳性衡准的实际值均远超过规范值,这也体现了三体船型相比常规单体船在稳性方面的优势。
4 结论
本文提出了一种全新的多海域自适应三体无人监测船的概念,该无人监测船可通过驱动连接桥调整主体和侧体间相对位置。经过对该概念船进行了系统的设计和性能研究后,得出以下结论:
1)进行了一多海域自适应三体船的船型研究,完成主体和侧体的型线设计,该方案具有较好的快速性和在复杂海况下优良的耐波性能。
2)根据对设计船的工作需要和船上搭载设备特点,完成总布置设计,针对无人船智能控制,按功能划分成6大系统,该设计可保证无人船监测任务的高效进行。
3)经过对设计船完整稳性的计算和与现有规范中稳性衡准的校核,设计船稳性满足规范的要求。