
基于自适应滤波的舰艇超短波微弱信号接收技术研究*
2022-01-06 08:35宋其轩
舰船电子工程 2021年12期
李 利 宋其轩 贺 寅
(1.海军大连舰艇学院信息系统系 大连 116018)(2.92001部队 青岛 266011)
1 引言
超短波因其具有频带宽、通信容量大、视距通信、频率可复用等优点,广泛用于舰艇战术通信。然而超短波传播时存在衰落现象[1],再加上通信环境的嘈杂,尤其在现代化战争中,弹药爆炸等带来的噪声与敌人的恶意干扰,致使噪声将有用信号淹没,进而导致信号的信噪比降低。以上因素都会使得到达接收端的超短波信号往往十分“微弱”,对信号接收造成不便。
当前现代化战争的作战空间趋于多维化、立体化,且作战节奏较快,对战场态势信息共享交换的作战需求进一步提高。通信保障作为作战系统的眼睛,必须确保其及时性、可靠性。因此,如何接收“微弱”信号便成为保障舰艇通信通畅准确必须攻克的难题。
2 超短波微弱信号接收功能需求分析
超短波在传输过程中,由于传输介质自身的吸收、散射作用,多径效应以及障碍物的遮挡等,会出现信号衰落现象。路径传播损耗,以及由障碍物遮挡造成的阴影效应均属于慢衰落,其不利影响可通过合理设计予以消除;由多径效应引起的多径衰落,因其会使接收信号的幅度出现较快的波动,属于快衰落,而快衰落对无线电信号传输带来的影响较大[2~4]。因此,消除快衰落的不良影响是舰艇超短波通信中必须解决的重点问题,分集、扩频、信道编码等均是削减快衰落的有效技术手段。
造成接收端超短波信号微弱的因素除信号衰落导致振幅降低外,还包括信号被噪声覆盖导致的信号信噪比降低。因此,如何实现噪声抑制与消除是接收微弱信号需解决的另一问题。
噪声普遍存在于通信系统中,且具有随机性,噪声可分为自然噪声、人为噪声和系统噪声。其中,自然噪声包括宇宙辐射带来的噪声、大气背景噪声,而这类噪声对超短波的影响较弱,可不作考虑。在舰艇通信中,人为噪声包括舰船航行、炮弹等带来的噪声,以及敌人无线电对抗施加的恶意干扰,这类噪声干扰是超短波微弱信号接收需要攻克的重点,可通过噪声抑制等方式消除。系统噪声普遍存在于通信系统中,通常可采取在噪声源抑制噪声、降低敏感电路对噪声的敏感程度等方式抑制系统噪声。
总而言之,接收微弱信号需从抑制信号衰落和噪声抑制两方面入手。论文着重分析静噪技术。
3 静噪技术
目前,传统的静噪技术主要有噪声检测、载波检测、导频检测等[5~6]。而自适应滤波静噪技术是当前的研究热点,是舰艇超短波电台静噪技术的发展方向。下面就该两类静噪方法进行简要阐述。
3.1 传统静噪技术
3.1.1 噪声检测静噪
噪声检测是指通过检测噪声信号的强度来判断有无有用信号,一般应用于超短波电台在FM模式下的静噪[7~8]。当超短波电台进行话音通信时,若接收的信号中没有有效信号,解调后会生成较大的白噪声,此时,接收机关闭音频通路;若超短波电台接收信号中有效信号强度增强,解调后噪声的强度会减弱,接收机打开音频通路收听话音信号。根据这种原理,设定一个电平门限值,当解调后的噪声电平高于该门限值时,就可认为无有用信号输入,关闭音频输出通路;当解调后的噪声电平低于该门限值时,可认为有有效信号输入,打开音频输出通路。因此,噪声检测静噪的关键是不断调整选择适当的门限值。在话音信号的信噪比较低的情况下,该方法的漏检率较高。
3.1.2 载波检测静噪
噪声检测静噪是根据噪声信号强度判断信号有无,而载波检测静噪则是根据信号质量筛选信号。由于调幅信号、双边带信号、单边带信号、调频信号的载波频率ωc是固定的,因此可采用锁相环提取载波,并检测其信号功率。根据载波功率越大有效信号的质量越高,载波功率越低有效信号的质量越差的特性,可选择适当的功率门限值。当载波功率大于门限值时,可认为有有效信号输出,打开音频通路;当载波功率低于门限值时,可认为输出信号无效,关闭音频通路[9]。
载波检测静噪实现起来比较简单,但在仅有载波信号而无有效信号的情况下并不适用,且需要反复选择适当的功率门限。
3.1.3 导频检测静噪
导频检测静噪是指在话音信号与载波调制前,附加一个导频振荡器,将振荡器产生的一个频率较低的单音信号(超短波电台通常为150Hz左右)插入话音信号中,此后再进行调制并发射,接收端接收信号后,通过检测单音信号的有无来判断有效信号的有无,并控制音频通路的开闭。接收端导频静噪的原理图如图1所示。

图1 导频静噪原理图
超短波电台接收到信号后,通过滤波器将其分为两路:一路为话音信号,送入话音通道;一路为导频信号,送入导频通道。其中,导频信号控制静噪开关。
由于导频静噪是利用固定的单音信号作为控制信号,并且其不需要像噪声、载波静噪一样不断调整门限值,从而不会导致信号遗漏,因此具有较高的静噪灵敏度。再加上导频静噪只需检测单音信号的有无,故具有一定的抗干扰性能。
3.2 自适应滤波技术
自适应滤波器是一种根据通信电磁环境的动态变化,利用特定的自适应算法改变滤波器的参数,以获得最佳输出效果的装置,是实现无线电通信噪声抑制的有效手段[10]。
自适应滤波技术相较于传统静噪手段具有较强的优越性,它可以根据所处电磁环境,适时地调整参数以达到最优的静噪效果,这种方法不需要人为调整,反应时间比人工调节快得多,且不易造成漏信现象,尤其适用于对时间、准确度要求较高的舰艇战时通信。下面,将重点讨论自适应滤波的相关技术。
4 自适应滤波关键技术及其仿真分析
4.1 最小均方算法
最小均方(LMS)算法[11]是如今运用最为广泛的一种自适应滤波算法,它最早于20世纪60年代初由威德罗和霍夫提出,随着科技的发展,最小均方算法也演变出许多改进算法。
4.1.1 算法原理
最小均方算法是通过比较输出信号与期望值的差距,调整滤波器的抽头权系数,使误差信号e(n)的统计均方值最小。
传统的最小均方算法以最陡下降法为基础,在此,先简要介绍最陡下降递推算法。
设输入向量:

抽头权系数向量:

输出信号:

误差信号:

滤波器输入信号自相关矩阵:

滤波器输入与期望值的互相关矩阵

故误差信号均方差函数:

该函数是关于抽头系数的二次方程,其图像为一个抛物曲面如图2所示。
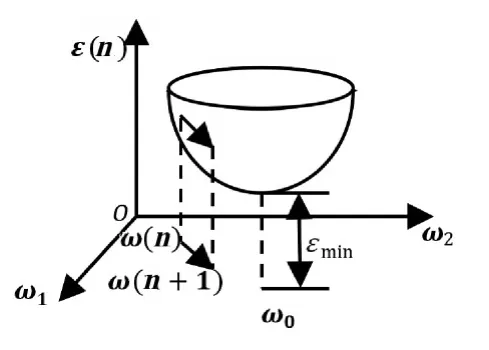
图2 误差信号均方差函数
由图2可知,ω=ω0时,ε(n)取最小值,因此,ω0便是ω的最优解。若R和p已知,根据Wiener-Hopf方程,有:

设∇为梯度算子,其列向量为

则:

若ω(k)表示第k步迭代的抽头权向量,∇kε表示∇ε在ω=ω(k)处的梯度向量,则其递推方程可表示为

其中,μ为步长参数。由上式可知,μ决定了ω(k)的收敛性,步长参数越大,ω(k)越发散。
传统的最小均方算法用n代替k,并且直接用e2(n)代替E[e2(n) ],即ε(n)=e2(n)。代入最陡下降算法抽头权系数向量递推式(11)中,得:

∇e2(n)的第i个元素为

将式(2)代入,得:

横向自适应滤波器输出:

故:

则:

因此,抽头权系数向量为

此递推公式称为LMS迭代。
最小均方算法实现起来并不复杂,它仅需要进行2N次加法运算和2N+1次乘法运算。再者,它对于多种信号具有较强的普适性和性能稳定性。因此,最小均方算法的运用比较广泛。

图3 理想与噪声信号仿真图
4.1.2 LMS算法仿真
假设有一路xs=10cos(20000000t)的理想信号,混入随机噪声后得到输入信号。理想信号、噪声信号及输入信号的Matlab仿真如图4所示。

图4 输入与理想信号对比图
由前节可知,抽头权系数迭代函数的收敛性取决于步长参数μ,假设fe为滤波器输入信号自相关矩阵的最大特征值,在此,取则输入信号经过50阶的滤波器后的输出信号如图5所示。
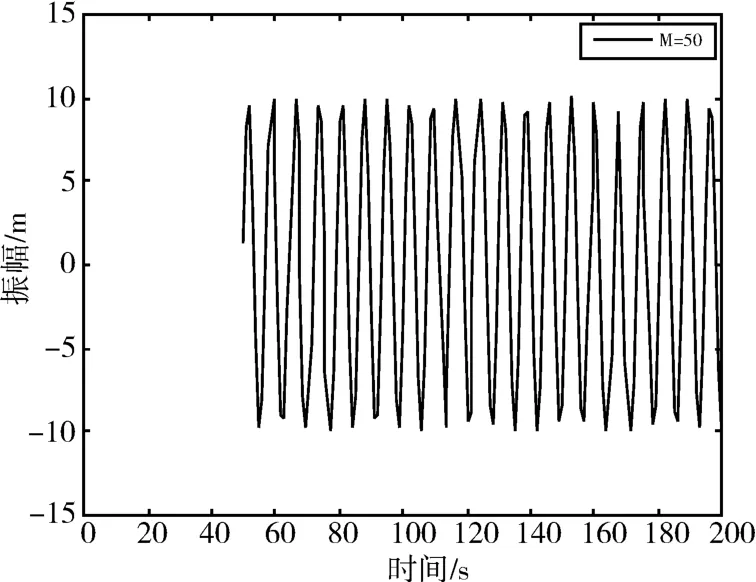
图5 滤波器输出信号仿真图
将滤波器输出信号与理想信号作对比,可以发现,经过一段时延后,两者曲线相近。其对比情况如图6所示。

图6 理想信号、输出信号及误差信号对比图
4.2 归一化最小均方算法
归一化最小均方(NLMS)算法与最小均方算法最明显的区别在于LMS的步长是固定不变的,而归一化LMS的步长是时变的。步长的时变使得归一化LMS算法的收敛性比LMS更好,收敛速度更快。
4.2.1 算法原理
LMS在实际应用中存在一些不足,其中最为显著的便是其收敛性受滤波器输入信号的影响较大。当输入信号在频带上的功率分布比较平稳时,其收敛性能好、速度快;当输入信号在频带上的功率分布存在跳变时,其收敛性便明显下降。下面介绍最小均方算法的一种改进形式—归一化LMS算法。
在LMS算法中,抽头权系数向量:

由于归一化LMS的步长参数μ并非一成不变,因此,要确定适当的μ(n)使得信号误差函数取最小值。其信号误差函数为

由上述两个递推公式可得:

进而可求出步长参数的表达式:

故,归一化LMS的抽头权系数向量:

然而,这种算法在实际中很少直接运用,通常情况下会引入两个常数,即:

其中,可看作步长参数,控制算法的收敛率和失调量。引入φ则是为了防止xT(n)x(n)取0或接近于0时,递归函数无意义。从递归式中可以看出归一化LMS算法需要进行3N+1次乘法运算。
4.2.2 NLMS算法仿真
仍是取一路xs=10cos(20000000t)的理想信号,其理想信号、噪声信号及滤波器输入信号如图4、图5所示。
取 0.5,φ取 0.00000000001,输入信号经过50阶的NLMS滤波器后输出信号图像如图7所示。
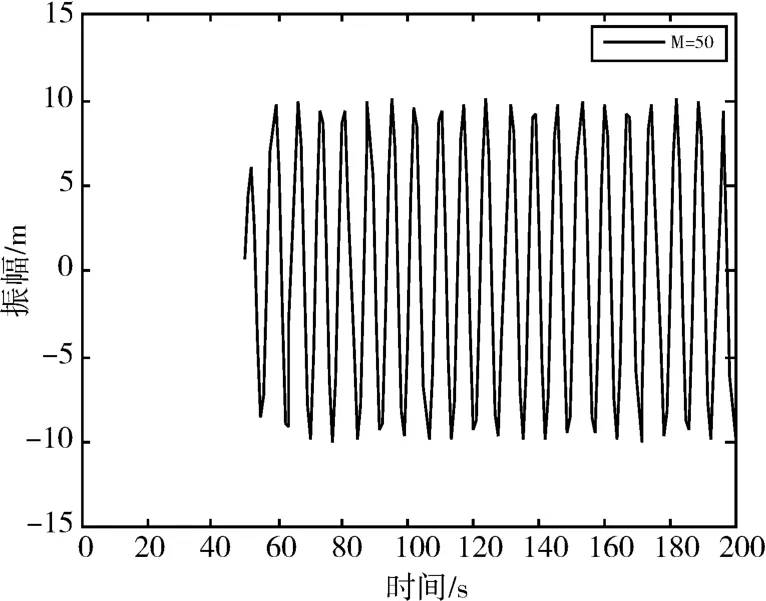
图7 滤波器输出信号仿真图
与LMS算法相似,经过一段时延后,输出信号与理想信号曲线相近。其对比情况如图8所示。

图8 理想信号、输出信号及误差信号对比图
4.3 LMS算法与NLMS算法的对比
由前可知,LMS算法需要进行2N+1次乘法运算,而NLMS算法需要进行3N+1次乘法运算,故而NLMS的运算量比LMS大。但NLMS步长的时变所带来的收敛性增强足以抵消其运算量增大的不足,下面将二者的收敛性进行对比。

图9 LMS误差曲线
为了更直观地比较LMS与NLMS的滤波效果,输入相同的语音信号,分别经过两种算法后,误差曲线如图10所示。
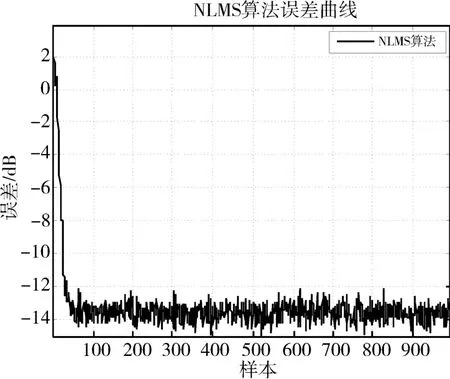
图10 NLMS误差曲线
从图中可看出,LMS的误差大多在16dB左右,而NLMS的误差大多集中在14dB,且NLMS的误差曲线趋于稳定的速度更快。
不仅如此,LMS算法在实际应用中需要不断调整步长以达到最优的滤波效果,而归一化LMS采用了变步长的方式,故NLMS操作起来更便捷且稳定性、可行性更强,更适用于舰艇超短波通信。
5 结语
传统的静噪方式(噪声、载波、导频检测静噪)因其容易造成信息遗漏,且需人为调整门限值,越来越无法满足快节奏战争的需求。而自适应降噪,则可以动态感知通信信道环境,按特定的自适应算法,自动调整滤波器参数,从而获得最佳信号输出。自适应静噪技术,无须人工调整,因而大大提高了处理速度,可以有效避免信息遗漏现象。因此,自适应静噪将是舰艇超短波通信实现微弱信号接收需要攻克的重点与难点。
但若仅仅采用单一的自适应静噪还无法满足现代化电子战的要求,现代化战争中,舰艇通信面临的挑战,不仅仅是微弱信号的接收,还有反侦察探测、抗恶意干扰等。因此,将自适应选频、自适应编码、自适应调制解调等多种自适应手段相结合的全向自适应技术[12]则是未来舰艇通信装备发展的重要方向。
猜你喜欢
科学大观园(2019年10期)2019-09-10
证券市场周刊(2019年19期)2019-05-27
中国经济周刊(2019年9期)2019-05-24
电机与控制学报(2018年9期)2018-05-14
——中国制药企业十佳品牌
西部大开发(2017年5期)2017-07-05
移动通信(2017年11期)2017-06-20
中国新通信(2016年21期)2017-01-06
电脑爱好者(2015年14期)2015-09-10
中国民族民间医药·下半月(2014年4期)2014-09-26
