
便携式UWB传感器模块在智能变电站施工安全管理中的应用
2022-01-06 11:12山东送变电工程有限公司王东波冉一丁陈秀红高峰密林
数字技术与应用 2021年12期
山东送变电工程有限公司 王东波 冉一丁 陈秀红 高峰 密林
智能变电站的施工安全管理需要进行优化和改进,受到了定位进准度低的影响,使得智能变电站内施工安全得不到保障。因此,提出便携式UWB传感器模块在智能变电站施工安全管理中的应用。使用便携式UWB传感器模块,制定载波调制UWB信号频谱技术方法,在智能变电站各种因素的干扰下确定UWB定位系统的技术应用。UWB传感器模块在智能变电站施工安全管理测试实验证明:此改进方法在一定程度上保证了系统的定位精度和定位性能,使施工安全得到保障。
0 引言
近年来,随着我国电网的发展,智能电网的发展趋势逐年上升,对家庭节点间自动、可控、经济输电的需求不断增加[1]。电力设备的智能变电站施工安全管理是当前技术发展的趋势[2]。如何安全、可靠、低成本地将现场设备状态数据传输到监测中心进行分析是该领域的研究热点[3]。作为一种相当成熟的定位系统,全球定位系统(GPS)在物流通讯、工程测量以及道路导航等方面应用广泛,主要用于电力系统的施工安全管理同步,以及对于电力故障的及时评判[4]。可是GPS也存在着一些缺点,其成本较高,对于干扰的阻抗能力不稳定,定位不够精准,对于相关环境下的工作要求不能完美适应。所以,GPS不能在高精度且低成本的定位场合中符合条件[5]。UWB技术则在相比较之下脱颖而出,其具有低消耗、抗干扰、系统简易以及定位精准等优点,很有可能在未来的无线定位技术中占据一席之地。在智能电网的建设中,智能变电站是重要的节点,将UWB传感器技术应用于智能变电站施工中,可以通过位置感知规避施工风险,以技术手段提升安全管理智能化水平,具有深远的影响意义。
1 便携式UWB传感器模块在智能变电站施工安全管理中的应用方法
1.1 载波调制UWB信号频谱技术
UWB定位是通过测距和测向来完成的,测向通常包括三种方法:基于到达角的估计、基于接收信号强度的估计和基于到达时间的估计[6]。目前,国内外对UWB定位技术进行了大量的研究,主要集中在位置估计、NLOS误差减小和精细化计算方法以及一些UWB和GPS混合定位方法[7]。在智能变电站环境中,需要面对复杂恶劣的变电站地形环境,以及传输设备干扰来定位操作人员和机械,因此需要解决电磁干扰引起的噪声[8]。干扰可分为开关操作、母线接地故障、高压工频电流磁场等。这些干扰源会影响UWB定位系统的正常运行,也会影响定位算法的准确性。常用的通信系统有WiFi、RFID、ZigBee、CSS和其他无线定位技术。但由于定位精度较差,如表1所示,难以满足要求。
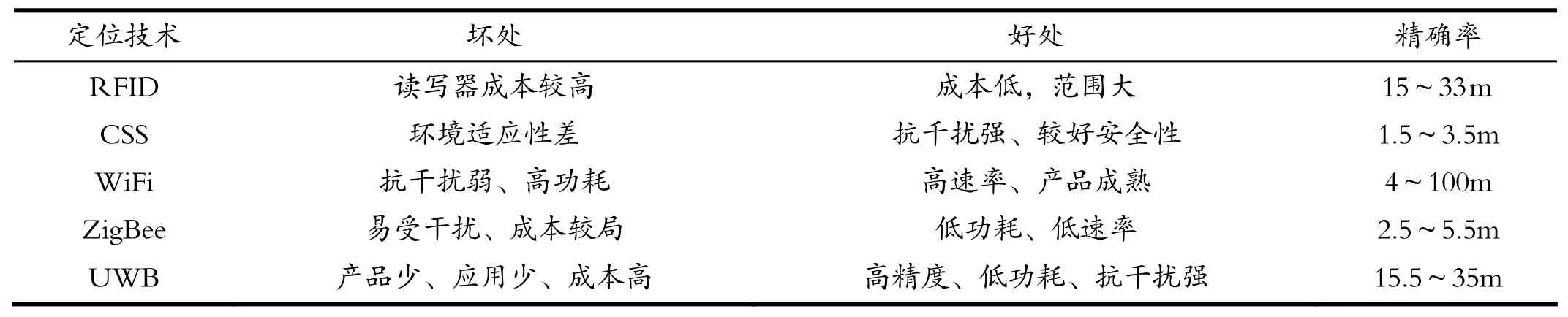
表1 常用无线定位技术表Tab.1 Commonly used wireless positioning technology table
到目前为止,对智能变电站环境下阴影噪声无线定位技术的研究还很少。这种无载波UWB系统实现简单、成本低,在民用通信中得到了广泛的应用。智能变电站施工安全管理中的定位系统是基于这种无载波UWB系统。天线的带宽要求应涵盖从几兆赫到几百兆赫的信号传输频谱范围。因此,主要研究智能变电站电磁干扰对UWB定位技术的影响。在UWB频载波调制系统中,向移动频率再移动原超宽频基频信号频谱,如图1所示。

图1 有无载波调制的UWB信号频谱Fig.1 UWB signal spectrum with or without carrier modulation
接收天线首先接收信号,将信号转换为零中频,然后对接收信号进行处理,一般用于有特殊要求的UWB系统中。空载波形变换后的信号通过直接扩频,它是由传输的天线发送结束,和接收端解调的相同频率扩展代码传输结束,然后处理接收到的信号,回到最初的原始信号。基于载波的UWB技术在雷达和通信领域得到了广泛的应用,使得对单载波UWB信号的调制可以通过将其移动到指定位置来精确控制信号频谱。由于调制后的信号幅度较小,因此通过发射机发射后的信号波形失真较小,且信号频带宽度较窄,方便了S-C-UWB系统各部分的天线设计。
1.2 在智能变电站各种因素干扰下UWB定位系统的技术应用
变电站的干扰一部分是0~300MHz的低频电磁干扰动以及42.5GHz高频电磁干扰;另一部分是多径干扰。低频干扰动对UWB系统没有太大影响,且低频电磁强度小于-40dBm/V,因此低通滤波器只能滤除低频部分。在智能变电站超高压环境中,间隙冲击电压力电磁干扰会更强,因此对UWB通信系统的影响不大。变电站操作人员的UWB定位安全监控系统,一般包括无线通信UWB传感器、UWB移动标签、LAS ER测距模块、旋转平台和定位机。用于确定超宽频移标是否超过上限。采用iR-UWB定位系统,可以在不受电磁干扰和多径干扰的情况下,对智能变电站施工安全管理环境中的人员和机械进行定位。
2 测试实验
2.1 实验准备
UWB传感器模块实验主要分为工作人员移动定位测试和部分固定定位测试。为了更好的熟悉实际的应用环境,在实际环境中测试系统的性能,也为了验证本设计的部分优化算法,进行了现场测试实验。在一个等待区域提前用三脚架(2m)布置一个固定的基站,建立定位坐标系,然后智能变电站人员由项目团队的指导下,操作人员在一个标签工作区域内等待,以确保设备和人身安全,测试路径为人员安全行走路径,由于智能变电站原有建筑物和设备的位置,行走路径呈不规则形状,大致为不规则三角形(如图2)。下面用MATLAB对采集到的数据进行简单的处理,并对以下几组误差图进行对比分析,验证研究的优化算法和设计。
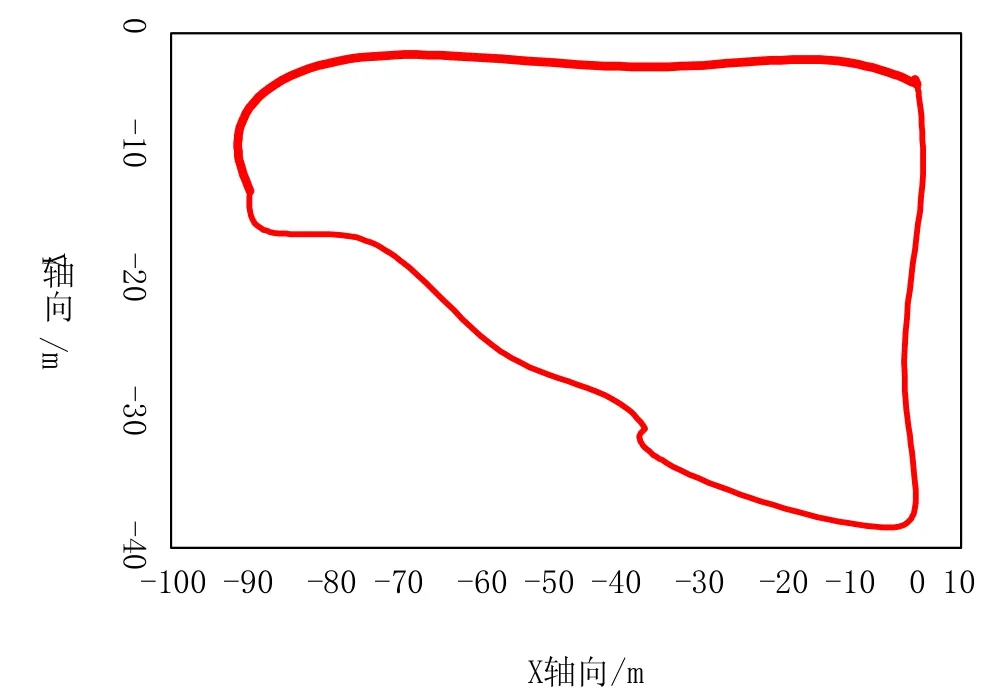
图2 实验数据生成的二维轨迹图Fig.2 Two-dimensional trajectory graph generated by experimental data
二维图像的右上角是行走轨迹的起点,除了左角和下角,整个轨迹相对稳定,且连续被跟踪。从轨迹上可以看出,此时系统的实时性和移动定位性能比改进前更强。与轨迹不连续现象相比,改进系统轨迹更具有连续性、收敛性和跟踪性。引入的UWB传感器模块设计也可以在一定程度上优化移动定位,提高定位跟随性,避免人员位置变化时定位位置跳跃的情况,使整个定位轨迹变得更加跟随和收敛。除现场移动定位测试外,为了说明稳定条件下的定位性能和精度,选取了移动过程中的一些随机定位点进行定点定位,定位数据样本如表2所示。
表2 中的实际位置在视觉距离内,所以系统稳定,不需要进行算法处理,定位结果也可以达到较高的精度。由于以下点的干扰等现象越来越严重,可以看出优化前的最大定位误差超过2m。这些定位误差可以通过大概率的去除错误测距信息来提高,并通过滤波算法进行优化,使改进后的误差也降低到25.5cm以下。纵向比较表明,z轴误差是最严重的,这种现象在大多数UWB系统中都存在。部分原因是大多数基站都在一个高度范围内,而实际测试过程中移动标签往往高于智能变电站总体数据,导致大部分测距误差在z轴上积累。一般来说,在定位空间接近100m×40m,定位精度可达不到20cm时干扰和阻塞相对较小,误差可减少到小于30cm通过算法优化严重阻塞的情况下,满足系统的设计要求。

表2 实地定点定位数据表Tab.2 Field fixed-point positioning data table
2.2 实验结论
从定点测距、移动测距、移动跟踪定位、定点定位和位置测试,结果表明本研究的算法和改进方法在一定程度上保证了系统的定位精度和定位性能,在稳定视线三维精度可达20cm的条件下,大部分误差在10cm以内,在严重干扰和遮挡的情况下,经算法优化后,稳定精度可达29.5cm之中。因为其余因素的影响,X轴和Y轴比Z轴的结果误差要小一些,但在可控范围之内,从而不构成影响。
3 结语
在智能变电站环境中,变电站电磁会对定位系统产生干扰,可UWB定位技术受到的影响较小,具有较好的抗电磁干扰性。UWB定位技术的发展历史是1960年至今。虽然其理论知识相对成熟,但在UWB定位系统的计算方法上仍处于发展阶段,有许多新的工作需要研究。本文所研究采用的UWB定位系统,关键在于将一个系统控制在可控范围之内,这个系统下一共有四个基站,外加多个单一的监控标签。因为监控区域有范围的圈画,因此如何完成多个监控系统的级联,是当今迫切需要解决的问题。UWB定位技术是一种精度极其高的定位技术,在室内外都可以使用,其非常适合应用在变电站之中。研究中提到的关于UWB技术问题若是得以解决和深化,此项定位技术将会在电力安全生产的未来发展中得到更大范围的应用。
引用
[1] 张媛,张雪莲,余晓玫.物联网和光纤传感技术相融合的独居老人监护系统研究[J].激光杂志,2020,41(2):151-154.
[2] 黄洛庆,冯寿廷.改进Faster-RCNN的交通标志检测[J].激光杂志,2020,41(4):57-60.
[3] 陈敏,王君,董明利,等.改进的Mask R-CNN多尺度实例分割算法研究[J].激光杂志,2020,41(5):40-44.
[4] 薄博文,孙文高.基于UWB定位的自动驾驶路径规划方法研究[J].自动化与仪器仪表,2020(5):13-16.
[5] 李玥.基于大数据分析技术的激光图像分类和识别研究[J].激光杂志,2020,41(8):129-133.
[6] 刘晓玲,牛海春,宋海燕,等.复杂环境下弱信号中的红外小目标自动检测[J].激光杂志,2020,41(10):82-86.
[7] 张颖.基于曲线拟合的物流仓储自动导引车远程定位算法[J].自动化与仪器仪表,2020(12):119-123.
[8] 童杏林,魏敬闯,邓承伟,等.高速磁悬浮列车测速定位技术研究进展[J].激光杂志,2020,41(3):1-5.
猜你喜欢
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
电子制作(2018年8期)2018-06-26
知识经济·中国直销(2018年3期)2018-04-12
电子制作(2017年8期)2017-06-05
现代工业经济和信息化(2016年5期)2016-05-17
西部广播电视(2015年10期)2016-01-18
学习月刊(2015年1期)2015-07-11
河南电力(2015年5期)2015-06-08
电测与仪表(2014年15期)2014-04-04
