
加权融合鲁棒增量Kalman滤波器
2022-01-04 09:44孙小君沈海滨闫广明
电子与信息学报 2021年12期
孙小君 周 晗 沈海滨 闫广明
①(黑龙江大学电子工程学院 哈尔滨 150080)
②(黑龙江省信息融合估计与检测重点实验室 哈尔滨 150080)
1 引言
Kalman滤波是Kalman于1960年提出的一种重要的状态估计方法[1,2]。这种最优递推滤波算法克服了经典Wiener滤波理论的缺点和局限性,便于在计算机上递推实现,计算量和存储量小,适合处理非平稳随机信号或时变随机系统的滤波问题[3,4]。目前广泛地应用于制导、全球定位系统、组合导航、目标跟踪、故障诊断、图像处理等领域[5-7]。
然而,Kalman滤波算法的局限性是要求精确已知系统模型参数和噪声统计[8]。在许多实际应用问题中,由于周围环境的影响、测量设备自身造成的误差、模型和参数选取不当等,会产生量测系统误差,而使用传统Kalman滤波算法难以消除该类系统的误差[9]。目前针对这个问题,已有一系列增量滤波算法被提出。文献[10,11]针对欠观测的非线性系统,分别提出了扩展增量Kalman滤波算法和增量粒子滤波算法。文献[12-14]针对欠观测的线性系统,分别提出了增量Kalman滤波算法、自适应增量滤波算法和加权观测融合增量滤波算法。它们都通过引入增量观测方程成功地消除了系统的未知量测误差,提高了欠观测系统状态估计的精度。关于增量滤波的应用研究,近年来也不断涌现:文献[15]将增量卡尔曼滤波算法应用到室内超宽带(Ultra WideBand,UWB)定位算法中以消除非视距(Non-Line-Of-Sight,NLOS)误差和卡尔曼滤波中由量测方程带来的量测系统误差。文献[16]基于增量Kalman滤波方法对于全球定位系统(Global Positioning System, GPS)多路径效应系统误差进行研究。文献[17]提出一种基于增量式卡尔曼滤波器的转子转速滤波算法,用来滤除永磁同步电机转子转速测量环节存在的量化误差等噪声。
当系统的噪声方差不确定时,Kalman滤波器的性能同样也将变坏,甚至引起滤波器发散[18]。为了克服这个局限性,鲁棒Kalman滤波的研究也备受人们关注。目前,许多鲁棒Kalman滤波的文献主要考虑模型参数不确定性的系统,而噪声方差被假定是精确已知的。文献[19,20]分别提出了有限视野(时变)鲁棒Kalman滤波器和无限视野(稳态)鲁棒Kalman滤波器。但他们仅考虑了模型参数的不确定性而噪声方差被假设为精确已知。对于带噪声方差不确定性的不确定系统,鲁棒Kalman滤波器的报道较少[21-23]。对于带单传感器和不确定噪声方差的广义系统和2维系统,相应的鲁棒Kalman滤波器分别被提出[21,22]。对于带不确定参数和噪声方差的单传感器系统,用Riccati方程方法,一种鲁棒Kalman滤波器被提出[23]。但对于带未知量测系统误差和未知噪声方差的不确定系统的鲁棒增量Kalman滤波算法问题尚无相关研究。
针对现有多传感器不确定系统的信息融合滤波理论的上述局限性和问题,本文将首先针对带未知量测系统误差和未知噪声方差的单传感器不确定系统提出一种基于增量方程的鲁棒增量Kalman滤波算法。进而提出一种最优加权观测融合鲁棒增量Kalman滤波算法。并分别进行了鲁棒性分析。仿真实验验证了所提出的算法的有效性。
2 问题描述
考虑带不确定噪声方差的多传感器线性离散时变欠观测系统的状态方程
3 局部鲁棒增量Kalman滤波器



4 加权融合鲁棒增量Kalman滤波器
由式(2)有



注5 类似注3单传感器的情形,定理4同样可以根据Kalman滤波器的性质,基于Lyapunov方程证明所提出的加权观测融合增量滤波器在式(49)意义上的鲁棒性。
5 实验模型及结果分析
设线性离散增量系统为



表1 局部和加权融合鲁棒增量Kalman滤波器在时刻k=200时的均方误差值比较
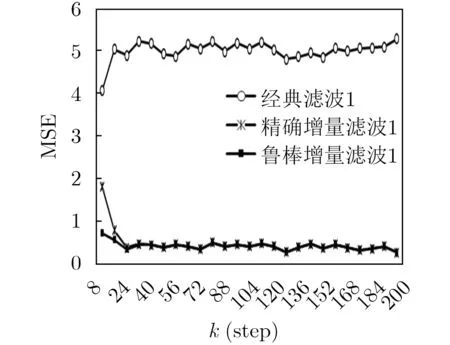
图1 局部传感器1的经典滤波器、精确增量滤波器和鲁棒增量滤波器均方误差比较
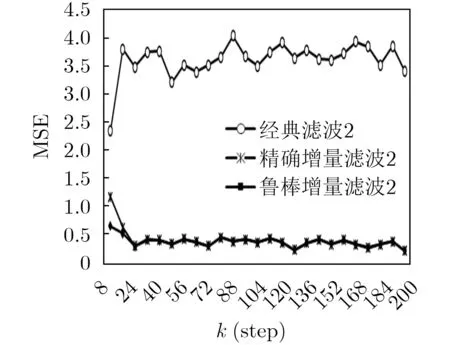
图2 局部传感器2的经典滤波器、精确增量滤波器和鲁棒增量滤波器均方误差比较

图3 局部传感器3的经典滤波器、精确增量滤波器和鲁棒增量滤波器均方误差比较

图4 局部和加权融合鲁棒增量Kalman滤波器的均方误差比较
6 结束语
对于带未知量测系统误差和未知噪声方差的多传感器不确定系统,本文首先提出了一种基于增量方程的鲁棒增量Kalman滤波算法;进而提出一种最优加权观测融合鲁棒增量Kalman滤波算法,可有效解决带未知量测系统误差和未知噪声方差的多传感器不确定系统的状态估计问题。仿真说明了所提出算法的有效性。
猜你喜欢
当代陕西(2022年6期)2022-04-19
中学生数理化·中考版(2019年9期)2019-11-25
自动化学报(2019年6期)2019-07-23
北京航空航天大学学报(2017年4期)2017-11-23
自动化学报(2017年4期)2017-06-15
中国惯性技术学报(2017年1期)2017-06-09
系统工程与电子技术(2016年7期)2016-08-21
电信科学(2016年9期)2016-06-15
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
浙江大学学报(工学版)(2015年1期)2015-03-01
