
锁紧释放机构接触力测量平台的开发与研究*
2021-12-30 05:36孙红星柳鑫恩刘择明
传感器与微系统 2021年1期
孙红星, 柳鑫恩,, 刘择明
(1.辽宁科技大学 电子与信息工程学院,辽宁 鞍山 114051;2.中国科学院沈阳自动化研究所,辽宁 沈阳 110016)
0 引 言
锁紧释放机构是对锁紧和释放目标零件的重要机构。其前端与目标零件之间接触力的测量能够为锁紧释放过程提供重要的参数依据,对锁紧释放目标零件在一定接触力范围内进行锁紧与释放,即能达到锁紧释放目的,又不会造成零件损坏。
接触力的测量方法有很多种,医学上假肢手接触力采用电容法进行测量,实现假肢手的控制。声表面波技术结合相关电路设计,作为新的力的测量方法[1,2]。基于视觉的角度,如原子显微镜等同样可以实现接触力的测量,但需要较高端设备[3,4]。基于光纤的角度,光子晶体微腔和光纤环形衰荡间接实现力的测量[5]。
接触力的测量技术显得尤为重要,首先,锁紧过程中,要确定锁紧装置与目标零件接触与否,就要测量目标与锁紧手指之间力的变化,当它们之间有力的示数,说明锁紧完成,并且要限制在一定的范围内,进行后续相关试验。同时,接触力的测量在蛇型机器人运动规划、玻璃清洁领域等领域都有所应用[6]。
1 测量标定原理
结合大量的文献调研,实验机构本身的机械结构,机械特性,力检测方法的难易、复杂程度,项目投入,以及项目主体后续平台的搭建与测力课题与主体的整合,采用一种传统测力对锁紧释放机构悬臂梁应变标定的方法,进行锁紧释放机构接触力的测量[7]。与传统直接测量的方法略有不
同,传统力传感器的使用受到安装空间,不能直接采用力传感器等限制。该方法在测试条件不受环境,安装空间的限制,并且该方法紧密结合锁紧释放机构本身特性,进行接触力的测量方式的研究。原理图如图1所示。
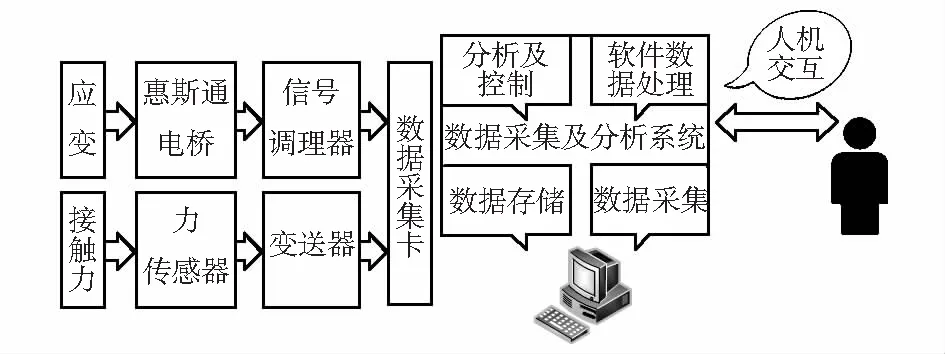
图1 原理框图
当步进电机驱动的一级锁紧机构与压电驱动器驱动的二级顶针机构与锁紧释放目标接触时,在锁紧释放机构前端会产生接触力,伴随着接触力的产生,在锁紧释放机构后端悬臂梁会发生形变,形变会随着接触力的变化而变化,寻找该应变与前端接触力的相关关系。
能够实现对锁紧释放机构悬臂梁在宏观驱动、微观驱动两种驱动方式下产生的微小应变信号的测量、信号调理,数据采集以及显示分析;该装置能够实现对锁紧释放机构前端与力传感器器接触产生的接触力的信号进行数据采集、放大以及显示;该数据采集及分析系统能够实现对于实验中多种通道的信号进行数据采集、存储、显示、分析处理、二次保存、打印、信号提示及报警。
2 机械装置与采集设备
2.1 锁紧释放机构
锁紧释放机构安装于带有丝杠滑台的步进电机上,通过支架与步进电机连接,步进电机作为锁紧释放机构的一级驱动,调节KH—01步进电机控制器输出脉冲的数量和速度,释放机构位置移动,使其与前端力传感器接触。锁紧释放机构内部,锁紧释放机构内部安装有2只压电驱动器,作为二级驱动,该驱动器由外界HPV系列压电陶瓷驱动电源输出电压控制,输出为0~30 μm左右,属于高精度驱动装置,驱动二级级顶针与前端力传感器接触。
2.2 机械固定平台
机械固定平台由底板、挡板组成,用于锁紧释放机构与力传感器固定的一种机械装置,源于需求,应用于实践。
连接节的设计是结合锁紧释放机构本身的机械结构与力传感器构造设计,该连接装置需要严格模拟实际锁紧释放机构与锁紧释放目标零部件接触,使力传感器与锁紧释放机构前端无缝对接,其对接触面为45°圆台面,转接头一端是M6的螺栓,另一侧是一个锥形体的凹面。 锁紧释放机构与目标零件接触力测量平台如图2所示。
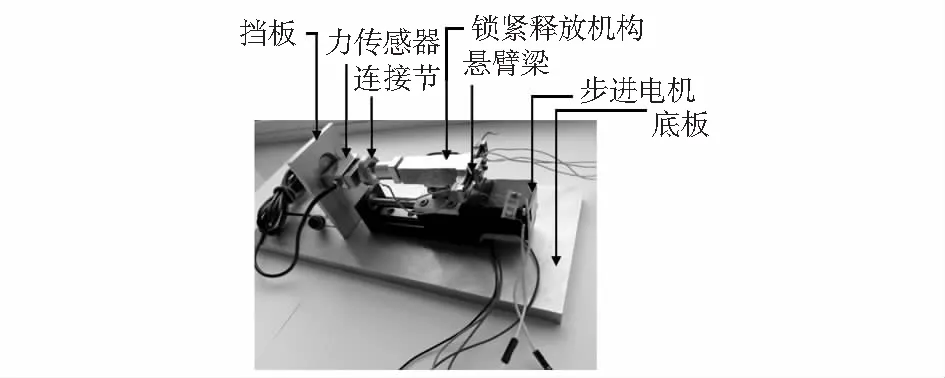
图2 锁紧释放机构接触力测量平台
2.3 应变片粘贴
应变片BX120—1AA型号;采用正确的粘贴方法和工具,在有限的位置范围内对应变片进行精准粘贴。采用相同材料的应变片在相同材料悬臂梁粘贴,作为温度补偿片。
2.4 惠斯通电桥的搭建
惠斯通电桥的转换,将应变限号转换成电压信号的变化[4]。采用高精度 0.01 %,温度漂移5×10-6的高精度电阻,并且在相同材质悬臂梁粘贴应变片,作为补偿片,桥路选择方式即1/4桥路、半桥、全桥等,外接直流稳压电源作为激励。
2.5 力传感器及变送器
ZNLBS—V1 微小拉压力传感器具有测量精度高、稳定性能好、温度漂移小、量程0~5 kg,综合精度0.03 %FS(full scale,精度1.5 g),灵敏度1.0~2.0 mV/V。变送器ZNBSQ,输出范围可选0~5 V输出,需要12 V直流电压供电。
2.6 采集卡及信号调理
经过广泛的调研,选用国内北京阿尔泰USB3202数据采集卡,该卡采集速度、精度、通道数等相关参数,性价比较高,价格合理。采用阿尔泰S1103信号调理电路。放大电路需要外接12 V直流电源供电。
3 数据采集与分析系统
基于LabVIEW开发的数据采集及分析系统,与传统应变仪配套软件相比,优势明显,灵活性强,易于开发、集成,不需要购买其软件和配套分析模块,成本低,性价比高。另外研发周期短,自主研发具有源程序,易于二次开发[8]。
1)参数调整模块:通道选择、频率采样数的选择、接线选择、放大倍数的选择,电桥方式选择、桥路电压的选择;2)数据采集模块:开始采集,可以多通道同时采集,阿尔泰数据采集卡不能像NI采集卡那样直接采用DAQ进行数据采集,需要采用调用库函数节点的方式,在LabVIEW中添加调用库函数节点,并且对其参数路径进行配置,多种调用库函数节点分别使用,实现对数据的采集;3)数据存储模块:多通道原始数据采用TDMS文件进行存储,TDMS分为文件名、通道组名、通道名,每一通道显示一种数据,可以对多通道大量数据进行高速存储,实验中的部分参数、拟合方程等采用电子表格进行存储;4)数据显示模块:对原始数据、测试中处理后的二次数据等多种数据都可以进行显示,对于测试中相关中间参数可以采用电子表格进行添加、录入;5)数据处理模块:可以对数据进行滤波、拆分,调零整合等多种方式处理;6)数据拟合模块:可以实现对数据线性拟合、指数拟合、幂函数拟合、广义线性拟合、多项式拟合等多种拟合方式的拟合,工程实际中以多项式拟合效果最好,应用效果需要采用相关参数进行权衡;7)数据提示及报警模块:能够人工设定预警信号的范围,对于到达设定上限和下限范围内的信号进行提示和预警;8)打印模块:对于实验中的部分数据表格及相关中间数据信息能够直接打印成文档,进行保存。
4 拟合方法
采用最小二乘法对应变信号与接触力信号进行多项式拟合。
假设有一实验,共有m个数据点,xi为应变信号,yi为接触力信号,画出m个数据点的直角坐标图像获得每个数据的xi和yi对应关系
(1)
(2)
y=[y1,y2,y3,…,ym]T,A=[a0,a1,a2,…,an]
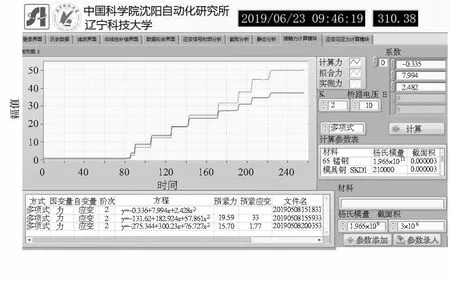
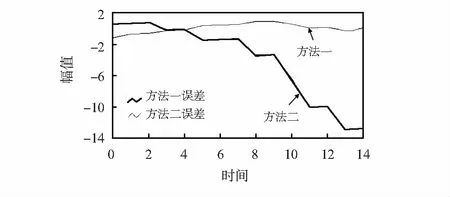
则一元线性回归的数据模型为y=XAT,这是一个不相容线性方程组,当rank(X)=2 A=(XTX)-1XTy,y=AX (3) 1)基于悬臂梁理论建立应变测量的标定模型。 2)采用宏观驱动与微观驱动分别对锁紧释放机构进行控制,同时测量悬臂梁的形变的变化,对数据进行存储。 3)在搭建好的锁紧释放机构接触力测量平台上,分别对应宏观驱动控制、微观驱动控制下的接触力进行采集,存储。 4)采用数据采集与分析系统,对采集的信号进行拟合和标定,对于拟合出来的函数关系进行存储。 5)根据拟合的函数关系,测试条件下,由应变信号推理出接触力信号的变化。 采用信号调理放大电路对惠斯通电桥的输出信号进行放大,将放大器输出连接到数据采集卡的相关端子口,再通过USB或以太网等多种形式,将数据传输到电脑。 在机械固定平台上安装力传感器,将连接节安装力传感器上,便于模拟锁紧目标零件与锁紧释放机构的接触,力的信号可以通过航空插头与显示仪表连接,也可以通过航空插头与变送器连接,再连接数据采集卡的相关端口,进而连接到上位机。 可以对锁紧释放机构宏观和微观两种驱动控制下产生的两种应变与力的采集与标定,最终实现在不能使用力传感器或者不易安装力传感器的实验条件下,锁紧释放机构接触力的测量,为微装配和微操作系统中力控制、测量、应用提供了更加方便,快捷的测量及控制方式[8]。 测试条件下,实测力与拟合力的关系如图3所示。 图3 实测力与拟合力的关系 实测力是传感器传输上来锁紧释放机构前端接触的接触力,拟合力是通过用实验条件下拟合的应变—接触力的函数关系,将测试条件下的应变信号作为输入,计算出来的接触力的变化趋势,由图分析,效果较好。计算力是根据应变—应力—力的相关公式,计算出力的变化趋势,由于在传递的过程中有摩擦等损耗,必定会使计算力小于实际的接触力,而标定法测量出来的计算力,不受损耗的影响,力由锁紧释放机构前端传递想后端悬臂梁的过程中,悬臂梁会出现应变的变化,但需要的是应变的变化趋势,即使有损耗,对于接触力的标定主体来说,并无影响,间接提高了测量的精度。 如图3所示,计算力是由应变—应力—接触力方式计算得出,为测量方法一;拟合力是通过标准力传感器标定应变得出,为方法二,即本文主要测力方法。实测力为标准的力传感器测量出的接触力的实际值,将方法一与方法二计算出的力的结果与标准接触力的值进行比较,图3共257组数据,从施加外力开始,即第100组开始取数据,每间隔10组取一组,共取15组数据绘制实验数据表格,部分数据如表1所示。 通过方法一与方法二计算接触力误差对比图,如图4所示。 表1 部分实验数据表 N 图4 方法一与方法二的误差对比 方法一计算接触力误差波动较大,并且随着实际接触力的增大,误差逐渐增大。通过拟合方法计算接触力的方法二得到的接触力结果误差较小,通过对该实验的数据分析,体现了通过接触力标定应变,间接测量接触力的方法,误差小,效果好,精度高。 基于LabVIEW数据采集及分析和测力方法可实现对于宏观与微观双驱动控制下接触力度测量、小信号测量。总体成本较低,可操作性较高,便于集成、整合,软件研发周期短,使用便捷,效率高。数据采集及分析系统属于自主开发基于LabVIEW进行开发的软件操作系统,能够实现对于悬臂梁应变信号力的标定,拓宽了应变信号应用渠道,为锁紧与释放机构接触力的测量,以及相关其他接触力的测量,应变的测量与分析提供了新的方法。如微加持力的测量、微释放与微装配、力测量与控制、桥梁载荷试验、监测,机械部件的应变检测和诊断等,提供了相关数据支撑与技术指导[8]。5 基于悬臂梁理论的测量标定步骤
6 信号的采集与分析
6.1 应变信号的采集
6.2 接触力信号的采集
6.3 数据分析系统
6.4 误差分析

7 结 论
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
汽车维修与保养(2020年11期)2020-06-09
铁道通信信号(2019年4期)2019-10-10
中国惯性技术学报(2017年1期)2017-06-09
股市动态分析(2016年23期)2016-12-27
光学精密工程(2016年3期)2016-11-07
股市动态分析(2016年7期)2016-09-29
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年29期)2016-08-04
