四车联动多用途重载全向转运平台研究
2021-12-30 01:29:52李所先周源洁
物流技术 2021年11期
李所先,周源洁
(1.四川航天神坤科技有限公司,四川 成都 610100;2.西北师范大学,甘肃 兰州 730070)
0 引言
20 世纪80 年代中期,我国开始发展首批核电站。早期的核电站基本在80 年代前后投入运行,在核电事业中发挥了重大的作用。同时,经过半个多世纪的发展,我国早期的核电站已经或即将进行较大的维修。对核电站设备进行检查、维修,并最终控制整个核电站的安全性,是核电站检修的最终目标。水泵电机是核电站的重要设备,在国防科技工业现代化持续发展中起到举足轻重的作用。在以上背景下,开展了对核电站水泵电机运输的研究。
1 四车联动多用途重载全向转运平台简介
四车联动多用途重载全向转运平台由4 套独立的单套多用途重载全向转运平台、拼接机构、紧固件等组成。四车联动多用途重载全向转运平台系统组成示意图如图1所示。
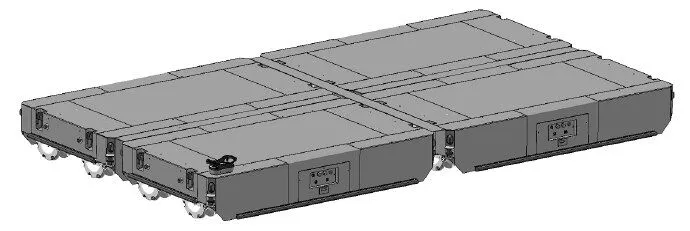
图1 四车联动多用途重载全向转运平台系统组成示意图
单套多用途重载全向转运平台主要由自动导引运输平台、自动控制系统、电源系统、减震系统、吊装机构及安全防护系统等组成。
1.1 自动导引运输平台
单套多用途重载全向转运平台的自动导引运输平台由八组麦克纳姆轮组成四套驱动系统,这四套驱动系统能独立控制完成整车的前进、后退、横移、斜移、原地360°旋转等功能,控制灵活,实现全方位运行。驱动系统每一个麦克纳姆轮上均安装有一个独立的悬挂系统,当车体在承受一定负载时,轴承座通过导向立柱上下移动以挤压阻尼式弹簧,阻尼式弹簧根据承受的压力调节自身高度,起到车体减震效果,保证麦克纳姆轮始终与地面处于接触状态。
自动导引运输平台。使用伺服电机进行驱动,动力强劲,运行平稳,多档可调无极调速。采用独立悬挂,增强了对地面适应能力。
1.2 自动控制系统
自动控制系统具有整体操作、独立操作两种功能选项。整体操作即4 套多用途重载全向转运平台组合为一体工作时,对设备进行的整体操控。独立操作即单套多用途重载全向转运平台独立工作时的操控。单套多用途重载全向转运平台的自动控制系统的核心部分通常包括主控制器、运动控制器、遥控器、BMS系统、避障系统、通信系统及操作面板,其中核心是主控制器,运动控制器通过通信系统接收主控制器的命令完成各运动轴的控制,而操作面板则完成人机交互的功能。主控模块是单套多用途重载全向转运平台车体控制的大脑,它集成多种通讯方式与外部器件控制端口为一体,目的是使通讯更加快捷、灵活、方便,通过CAN 通讯接口与安装运输台架中其它模块进行通讯,发送和接收指令,实现对单套多用途重载全向转运平台整体运行的操作。
1.3 电源系统
单套多用途重载全向转运平台采用锂电池为系统提供动力,并实时监测、显示蓄电池剩余电量,确保单套多用途重载全向转运平台的正常使用,并在蓄电池低电量时自动发出提示。
1.4 安全防护系统
安全防护系统主要包括智能激光避障系统、防撞安全触边和急停按钮,在非正常情况下可以通过操作急停按钮使电机立即断电,让车体紧急停车,保障现场人员及设备的安全。
1.5 吊装机构
为便于吊装搬运,在单套多用途重载全向转运平台车体前后两端各配置两个吊装机构。
1.6 拼接机构
为适应现场的不同规格,不同型号(尺寸、重量)的电机转运,4套单套多用途重载全向转运平台通过8套连接机构可连接为一体,组成四车联动多用途重载全向转运平台,对电机进行搬运、转场。当作为四车联动多用途重载全向转运平台使用时,需将4台单套多用途重载全向转运平台平行组装运输,并用连接机构连接,重型电机固定安装在四车联动多用途重载全向转运平台上,通过一台遥控器进行控制;需要运输轻型电机时,将四车联动多用途重载全向转运平台分开使用,单独使用多用途重载全向转运平台。
连接机构包含连接座、连接柱、插等组成,通过螺栓紧固件安装于车体结构上。
2 关键部件—麦克纳姆轮的设计计算[1]
麦克纳姆轮由轮毂和多个辊子组成,辊子与轮毂轴线成一定角度(偏置角通常为±45°),辊子可以绕自身轴线自由旋转。所有辊子沿毂轴向方向形成的包络面为一个圆柱面,因此其投影构成一个圆,圆心为o点。麦克纳姆轮包络面的半径为R,单个小辊子两个端面的圆心为A点和B点,在投影面上的投影分别为m点和m’点,m点和m’点之间的圆弧对应的圆心角为θ,β角为θ的一半,弧pp′为辊子外围轮廓线投影,如图2、3所示。
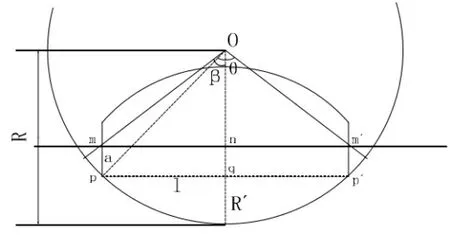
图2 辊子沿麦克纳姆轮轴向方向投影
为了保证全向移动平台在工作中承受较重的载荷,同时为确保运动的连贯稳定性,需要保证任意时刻每个麦克纳姆轮至少有两个小辊子和地面接触[2]。因此,相临两个小辊子的投影存在一定的重合,对应的角度为重合角θ′。
令麦克纳姆轮中小辊子的总数为n,小辊子的长度为LAB,小辊子的最小半径为a,小辊子的重合度为E,辊子轴线与麦克纳姆轮轴线的空间夹角为η(一般取45°)。可以推出如下公式:

图3 相邻辊子沿麦克纳姆轮轴向方向投影
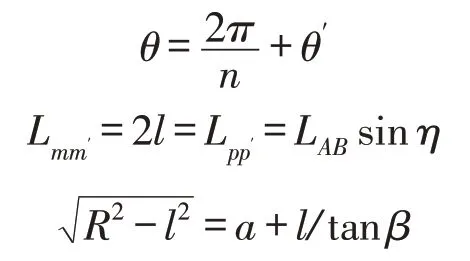
如图4所示,为了防止正常工作时辊子之间发生干涉,相邻两个辊子之间须存在一定的安全间隙,因此要求LGH >2LGE,所以可推导:
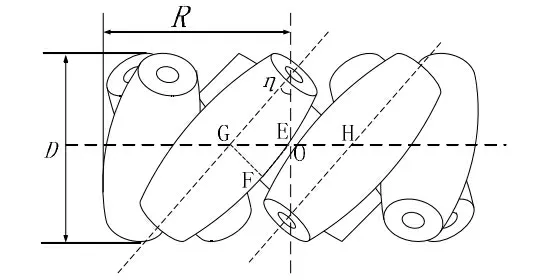
图4 相邻两个辊子之间的安全间隙
得到n<9,由于n通常情况下取能被360°整除的整数,如8,9,10,12,15等。所以取n=8。所以设计的重载全向轮半径辊子在全向轮轴线方向投影中对应的中心角θ为46°,经过计算和比对,小辊子个数为8个。
3 关键技术研究
3.1 四车联动多用途重载全向转运平台运动形式研究[1]
为满足水泵电机运输转场功能,四车联动多用途重载全向转运平台设计为可移动式,保证X-Y平面内运动。传统的运动形式均采用万向轮来实现。万向轮通常采用聚氨酯轮,通过两轮差动原理实现整个转运平台的转向功能,能够实现前、后、转弯等运动功能,制造简单,价格便宜,目前广泛应用于汽车、电子、物流等行业。但由于其运动灵活性不够,无法全向平移,效率较低、复杂环境中作业困难,调整精度差,有一定的运动局限性,在很多场合的应用受到了限制,无法满足水泵电机转场现场空间局限性。
四车联动多用途重载全向转运平台由4 套独立的单套多用途重载全向转运平台、连接机构、紧固件等组成。其最大优点在于其卓越的运动灵活性,能够实现真正意义上的全向移动,且不同运动方式之间的转换迅速,非常适用于零部件、设备的转运工作,尤其是在运动空间要求较高(运行通道空间狭窄)的场合具有出色的表现,可实现水泵电机类设备安全转场等。
3.2 四车联动多用途重载全向转运平台转场安全防护研究
安全防护系统是四车联动多用途重载全向转运平台上不可或缺的组成部分,为确保转运平台工作满足核电作业现场的安全性要求,转运平台安全防护系统拟采用智能化激光避障系统、防撞式安全触边及传统的急停开关、声光报警组合方式,在转运现场空间局限,移动盲区较多的情况下,可确保设备安全工作。在非正常情况下可以通过操作急停按钮使电机立即断电,让车体紧急停车,保障现场人员及待转运设备的安全。
4 结语
以某核电站检修电机设备为依托,结合以往水泵电机维修转场运输的经验,针对核电站多批次不同规格电机转场工况开展研究,通过对电机设备工艺的分析研究,研制一套用于水泵电机类转场运输的专用设备。其目的是建立一套以安全、质量保证为核心的电机维修标准和规范,指导核电站维修工程的顺利建造,确保其安全、可靠运行,为核电站后续的运行、维护做好技术储备。
猜你喜欢
军事文摘(2023年15期)2023-09-20 02:08:20
检察风云(2023年16期)2023-09-05 22:02:47
橡塑技术与装备(2021年16期)2021-08-27 11:49:12
机械设计与制造(2018年11期)2018-11-12 08:05:26
太空探索(2016年7期)2016-07-10 12:10:15
公民与法治(2016年1期)2016-05-17 04:07:56
建筑工程技术与设计(2015年22期)2015-10-21 18:37:26
筑路机械与施工机械化(2014年8期)2014-03-01 03:01:28
食品与机械(2013年6期)2013-03-20 11:38:10
航空知识(2000年8期)2000-06-07 19:31:52