基于泛在电力物联网的防盗电子井盖远程自动监控系统设计
2021-12-27 11:06:18袁帅,刘烊,李丹,孙安,赵睿
制造业自动化 2021年11期
袁 帅,刘 烊,李 丹,孙 安,赵 睿
(国网丹阳市供电公司,丹阳 212300)
0 引言
工业技术飞速发展过程中,工业机器人不断优化升级,为工件的分拣工作提供更加精准的控制技术,基于此出现了工业机器人分拣控制系统,依靠智能识别、跟踪定位以及人机交互等技术,完成对工件的快速分拣工作[1]。但随着仪器仪表精密程度的不断提升,各种各样的精密零件数量和种类都越来越多,工业机器人分拣过程中出现了许多问题,其中最典型的问题就是识别定位数据偏差较大,导致分拣过程中存在缺失工件、工件分类错误等问题,直接影响工业企业后续的制造生产进度。为了进一步提高工业机器人的工作效率,研究了基于迁移学习、场景特征的控制方法,但经过实际应用发现,这些方法尽管稳定性较强、分拣速度较快,但对于分拣结果的优化并不理想,针对这一问题,设计全新的工业机器人快速分拣控制方法。
1 基于泛在电力物联网设计防盗电子井盖远程自动监控系统硬件
1.1 基于泛在电力物联网设计声音采集模块
防盗电子井盖远程自动监控系统的硬件主要分为两个主要部分,分别是采集模块和无线传输模块。在设计声音采集模块的过程中,导入物联网体系,可以更好地实现对物理世界的控制和管理,并辅助分析与决策。这种通过将信息可视化以提高电子元件的控制能力的架构,被称为泛在电力物联网。想要提高声音采集的准确性,可以通过将其分贝放大的方式,建立一个电力物联网架构的感知层,作为对声音的收集模块,此时其传感器输出电路的原理如图1所示。
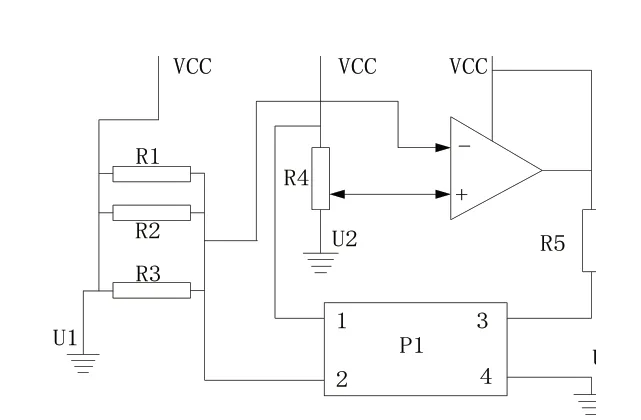
图1 声音采集传感器电路图
如图1所示,当选择P1作为模拟量输出时,可以直接将A-OUT接到处理器中,在设定电压参考值的前提下,会随着电阻率的变化而发生细微的变化。在电阻R4中,滑阻的变化会直接引起电路总模拟量的输出变化。将传感器中的主控板与其他各项功能模块相连接,得到如图2所示的线路布置。
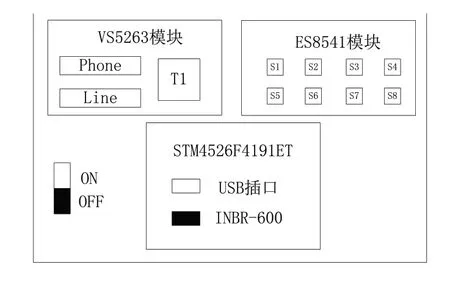
图2 声音采集模块线路布置
如图2所示,在主控板中,包括芯片T1和分贝检测模块STM4526F4191ET,这两个模块分别负责监测声音的录制完成度以及频谱的音色。声音经过VS5263模块被收集到防盗电子井盖远程自动监控系统中,然后通过ES8541模块经过频谱分析以及分类处理,将其分别归类到不同的声道中,最后经过STM4526F4191ET转接到其他的关口,分别进行不同的操作。在这样的芯片中,对周边环境的声音会变得十分敏感,很多细微的声音都会被直接放大[2]。本文中声音采集模块的工作电压通常为3.0V~5.0V,在解码后,可以经过不同格式的文件做出细微的调节,最后通过高低音设置空间效果,实现通信功能。此时的单片机连接方式如表1所示。

表1 单片机连接
如表1所示,在连接VS5263模块与单片机匹配系统的过程中,需要首先调解高低音系统,并调解参数,连接所有控制接口。对于音频中与外部连接的单片机系统,可以实现接口特性、加码格式、编码格式、对外接口、板载录音、音量控制、高低音控制、空间效果控制、加码时间输出等多种参数特性的配置。
1.2 设计无线传输模块
在电力物联网的传输系统中,无线传输模块通常分为AP模式、station模式、混合模式三种主要的工作模式,这三种模式各有优缺点。本文设计的防盗电子井盖需要考虑到功耗和体积的问题,因此需要在3.0V的直流电源中安全传输数据,并设置wifi热点作为客户端到指定输出端的编程窗口。在该传输控制器中,EBS2622芯片可以在3.0V的电压下安全工作,并具备体积小、低功耗、传输效率高等优点,相比起其他功能的无线传输芯片,不仅可以实现数据的传输功能,耗能控制所有兼做应用处理器的内置CPU[3]。这样一来,在2ms以内所有内置协议就可以被唤醒,并连接到传递的数据包。当待机状态被功率小于1.0mW的数据唤醒以后,较快的传输效率可以极大地减小传输的时间损耗,保证传输的准确率和效率。
2 设计防盗电子井盖远程自动监控系统软件
2.1 自动更新防盗电子井盖自动监控权值
当前的各城市以及小区内时常会出现井盖丢失等现象,为防止此类事故发生,直接对电子井盖进行防盗处理。使用BP神经网络可以直接在电子井盖的软件层面建立一个多层的神经反馈网络,使信息做到传递向前、误差向后的现象,此时的电子井盖防盗神经元模型如图3所示。
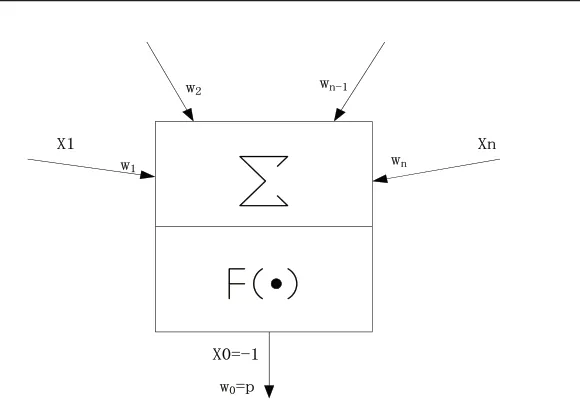
图3 电子井盖防盗神经元模型
如图3所示,在目标值与实际输出值之间存在一个逐层反向增加的误差,在神经网络的模型中,需要逐级增加梯度值,作为算法的反向映射函数。向量X与向量Y之间的函数关系可以表示为:

式中,向量X与向量Y存在非线性的对应关系,在三层神经网络中,可以得到三层结构如图4所示。
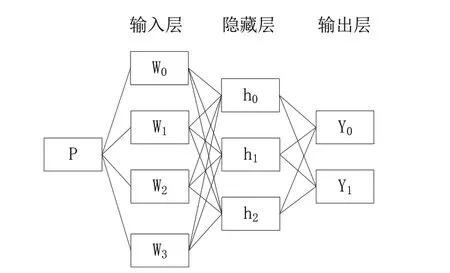
图4 神经网络模型
如图4所示,在输入层中含有四个不同的映射单元,此时其经过隐含层的神经元输入为:

式中,Hm表示隐含层中第i个神经元的输入权值;Wi表示第i个神经元的权重指标;gi表示隐含层的数据量。在隐藏层传递到输出层的过程中,可以得到函数表达式为:

式中,outkn表示输出层在第k个神经元中的权值;wk表示经过隐藏层后第k个神经元的权重指标;ink表示输入层的第k个神经元权值[4]。通过以上公式,可以计算出防盗电子井盖自动监控权重的梯度指标,并以此计算预期的监控误差。
2.2 优化音频分析适应度函数
在神经元的输出中,想要优化音频分析适应度函数,就需要首先计算负梯度方向的输出误差,并以此获得其修改量:
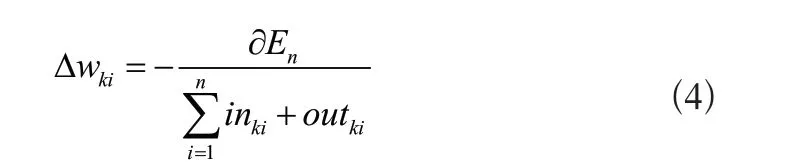
式中,△wki表示经过输入层、隐藏层、输出层后得到的误差函数误差修改量;En表示全局的梯度修改系数;inki和outki表示经过输入层以及输出层的神经元权重量。此时若假设学习速率为δh,可以在随机生成初始结构数据的过程中,确定每一个个体的种群规模。通过适应度函数判断算子的驱动效果,并计算个体选择的概率,公式为:

式中,Pd表示在第i代种群群体中个体选择的概率;Fp表示个体的适应度值;Fi表示非负适应度值。适应性函数在评价种群个体的优劣程度时,也需要根据相应的排序选择合适的概率,因此适应度函数一般都会选择正值。此时优化后的适应度函数可以表示为:

式中,ni表示防盗电子井盖在输出信号时经过的节点数量;pk表示适应度函数在算法驱动中的概率系数;ti和ki分别表示系统输出的期望值和实际值[5]。通过如上所示的方式,可以得到准确性更好的防盗电子井盖音频分析适应度函数。
2.3 建立电子井盖防盗识别模型
通过适应度误差调整值获取更优的音频识别系数,并将填入防盗识别模型中,如图5所示。
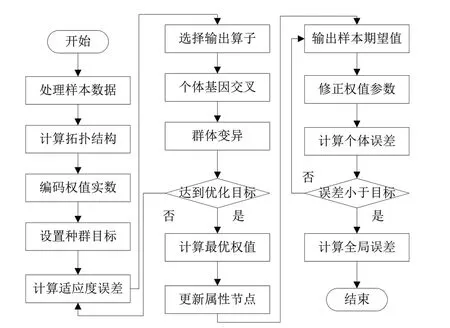
图5 识别算法流程
如图5所示,在建立电子井盖防盗识别模型的过程中,需要首先建立现有数据样本的集合,通过神经网络的训练,获得初始阈值与权值的优缺点。计算拓扑结构,令优化后的系数赋值给种群实数,并计算种群目标。在此过程中,需要提前确定隐含层的神经元数目,其计算公式为:

式中,H(p)表示种群隐含层中神经元的节点总数;an和bm分别表示输出层以及输入层中神经元的数量;pi表示网络训练参数,通常为一个常数。通过一系列交叉、变异的操作后,判断目标实体是否实现了优化结果,判断公式为:

式中,Fd表示函数在矢量时间轴中的非线性映射系数;F(i)表示测试矢量在第i帧图像中的优化距离;T(i)表示测试矢量在第i帧图像中的优化时间。由此可以得到优化目标的节点数,并计算出个体误差与全局误差,通过误差修正获取准确率更好的识别模型。
3 实验设计
3.1 搭建实验环境
本文通过泛在物联网设计了一个防盗电子井盖的远程自动监控系统,为测试该系统准确性,设计以下实验。在搭建电子实验平台的过程中,需要提前调节监控系统中的电路电流,数据的采集精度设置为1.5%,标准工作电流为0~10.0A,标准工作电压为0~1000V,此时的实验系统实物如图6所示。
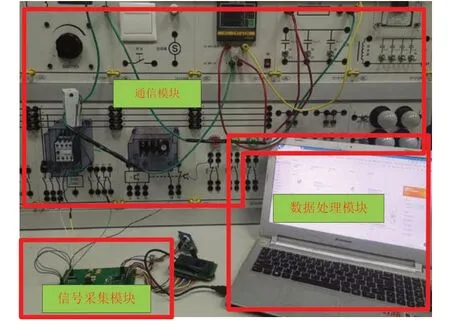
图6 实验系统实物
在实验系统之外,还需要设置一个可以实时观测传感网络的电子井盖模型体系,该体系中共有10个防盗电子井盖的节点,第一个节点距系统终端的距离为500m,此后各节点之间的距离依次增加,至第10个节点,距系统终端的距离为5000m。通过不同距离下信号接收以及识别的准确性,判断文中设计的电子井盖远程自动监控系统对井盖周边声音的识别能力,是否能够通过声音防盗。
3.2 测试实验最佳信噪比
在实验过程中,分别在电子井盖周边设置自身移动、轻声敲击、汽车行走、行人踩踏、汽车鸣笛等五种不同的声音模版,然后使用不同的信噪比在井盖节点周边传递声音,同时监测声音识别的准确率,以此得到的数据如图7所示。
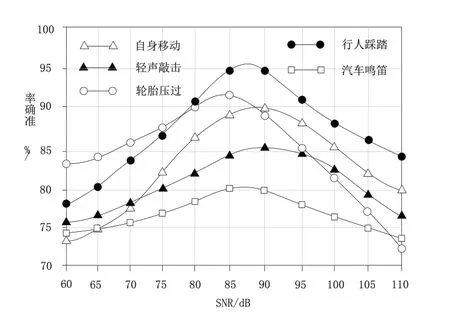
图7 不同信噪比下监测准确率测试
如图7所示,通过五种不同声音识别结果的对比可知,当信噪比增加时,识别结果的准确率呈现出先增加后减少的趋势,无论是电子井盖自身移动的声音,还是轻声敲击、汽车行走、行人踩踏、汽车鸣笛四类干扰音频,均在信噪比为85dB~90dB时,达到识别准确率的最大值。电子井盖“行人踩踏”音频识别的准确率最大可达96%,在82dB时达到顶峰,“轮胎压过”和“汽车鸣笛”音频在85dB时达到识别结果的最大值92%和80%,“自身移动”和“轻声敲击”音频在信噪比为90dB时,达到识别准确率的最大值90%和85%。
3.3 监控系统准确率测试
对比文中基于泛在电力物联网的监控系统,以及现有的两种监控系统,根据图4中信噪比的测试结果,在本实验中选择信噪比85dB作为实验音频的噪声环境,以确保实验结果的准确性。在五个防盗电子井盖周边,分别播放1000段不同的音频模版,其中五种音频的数量分别为200个,测试集的修正系数取值为0.05。将“自身移动”的音频频率设置为“移动电子井盖音频”,将其他四种音频模版设置为“非移动电子井盖音频”,分别测试这两类音频在系统识别过程中的识别准确率,得到如图8所示的实验结果。
在图8中,三种方法经过系统识别可以得到如表2所示的实验测试结果。
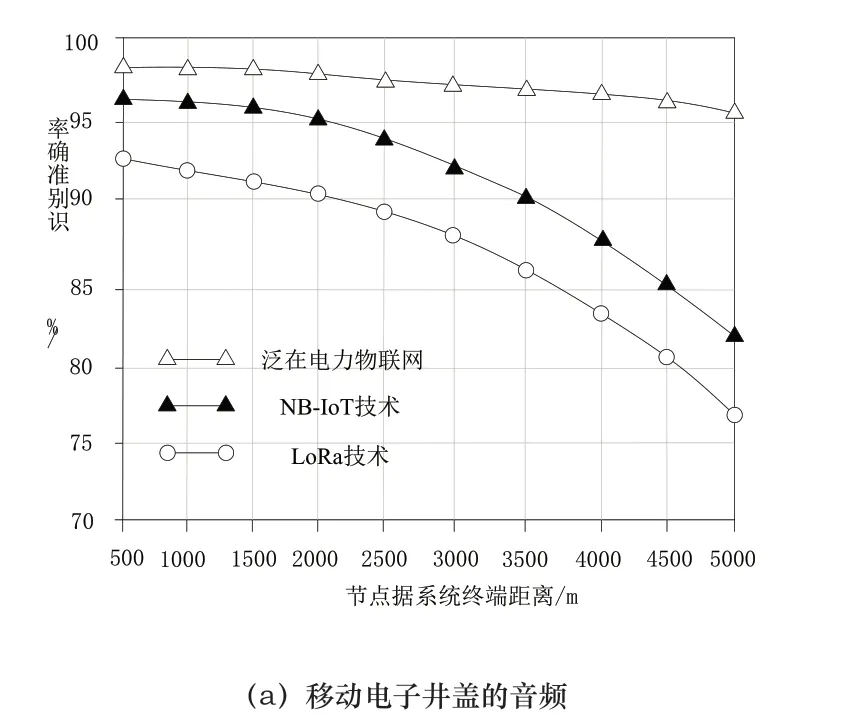
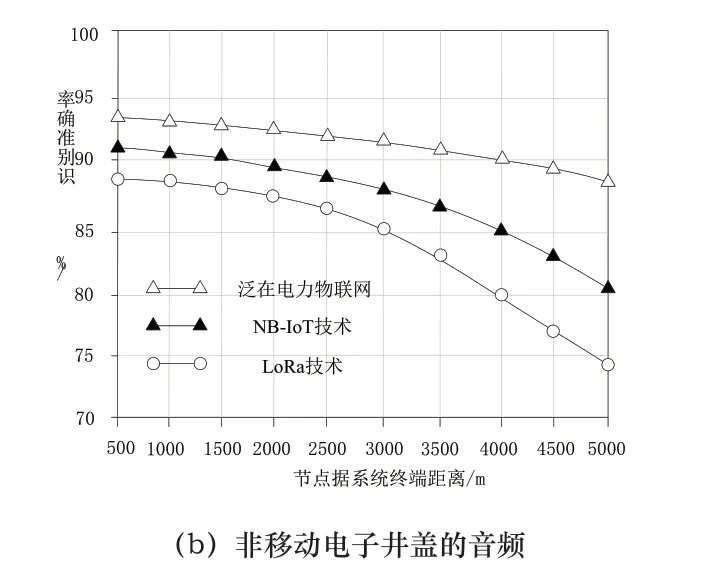
图8 系统识别准确率

表2 系统识别准确率比较
如表2所示,可以明显看出,通过泛在电力物联网方法设计的系统识别准确率在节点1与节点10中均高于同级别的其他两种方法,且在变化量的比较中,文中方法具备明显优势。由此可见,文中基于泛在电力物联网的防盗电子井盖远程自动监控系统可以更好地识别井盖是否被盗窃,其对于声音的识别能力更强。
4 结语
本文基于泛在电力物联网设计了一种防盗电子井盖远程自动监控系统,可以在远程自动通过声音识别井盖周边的动向,对汽车鸣笛、行人踩踏、汽车压过等不同声音种类,并准确识别。在该防盗电子井盖下,井盖的状态数据可以通过音频收集装置以及无线电通信装置传输到较远距离的计算机中,通过主机进行数据识别与整理,并将所得到的井盖状态数据及时上传。
猜你喜欢
青少年科技博览(中学版)(2022年10期)2023-01-07 06:16:18
计算机仿真(2022年8期)2022-09-28 09:53:02
军事文摘(2018年24期)2018-12-26 00:58:10
小学生作文(低年级适用)(2018年10期)2018-10-27 05:46:00
电子制作(2018年2期)2018-04-18 07:13:27
汽车维修技师(2018年10期)2018-03-14 06:26:06
童话世界(2017年26期)2017-12-18 00:31:13
中国塑料(2016年11期)2016-04-16 05:26:02
教育与职业(2014年16期)2014-01-19 01:24:36
舰船电子工程(2010年1期)2010-04-26 05:06:48