开关磁阻电机位置控制系统的变磁链SVPWM-DTC算法
2021-12-27 06:48王紫旖赵世伟
机械制造与自动化 2021年6期
王紫旖,赵世伟
(华南理工大学 电力学院,广东 广州 510640)
0 引言
开关磁阻电机(switched reluctance motor,SRM)具有结构简单、制造成本低、效率高等一系列优点,但由于其固有的双凸极结构,使电机转矩脉动较大,影响和制约了SRM在位置控制等要求转矩脉动较小领域的应用[1]。
直接转矩控制(direct torque control,DTC)的独特性在于转矩的直接控制,动态响应很快,且已在感应电机控制应用中获得了成功[2-4]。研究表明,将DTC引入到SRM中,回避了复杂数学模型的同时,在抑制SRM转矩脉动方面效果也比较理想。文献[5-6]重新设计了转矩滞环规则;文献[7]中引入PWM取代转矩滞环,通过调节占空比来调节基本电压矢量作用的时间,但无法精确纠正转矩偏差。文献[8-10]用模糊直接转矩控制器替换原系统的滞环控制器,可以根据不同运行情况判断磁链和转矩的优先级,从而选择不同的电压矢量。文献[11]提出一种基于分子动理论占空比调节的直接转矩控制;文献[12]在细分扇区的同时,对传统DTC的电压矢量选取规则进行改进,使转矩和磁链的调节更加合理;文献[13-16]在换相区增加新的电压矢量,能够实现各换相区对应的励磁目标提前导通,减小换相区的转矩失控现象,但仍然无法从根本上规避滞环控制所带来的问题。文献[17]提出了磁链无差拍控制(DB-FC),使磁链能被定量调节,但定子绕组的稳态铜耗较大。文献[18]提出一种基于变磁链的模糊控制器,该控制器通过速度偏差间接调整磁链;文献[19-20]通过速度调节器输出的参考转矩来获取给定的参考磁链;文献[21]通过实验拟合得到电机转速与磁链给定值的关系,但其在位置控制中无法使用;文献[22]在细分扇区的同时,将模型预测控制运用到DTC中,但计算较为繁琐,且需要较为精确的电机磁链特性曲线。
针对位置控制系统高精度的控制要求以及现有研究中的不足,本文在传统DTC的基础上引入空间电压矢量调制技术(space vector modulation,SVPWM),提出变磁链SVPWM-DTC策略。该控制策略可对控制矢量作用时间进行占空比调制,控制频率固定且减小了转矩的过冲或缺失。变磁链策略详细分析了稳态磁链值对定子电流分配的影响,结合SRM磁链特性数据,可对不同工况下的磁链给定值做出合理选择,以解决系统损耗大的问题,并实现转矩脉动最小化。
1 SVPWM-DTC策略
1.1 DTC原理
SRM的瞬时转矩极性判断可表示为[23]
(1)
由于SRM的相绕组是单极性驱动,且在一个微小的控制周期内,电流的变化率相对于磁链的速度变化有一个一阶延迟的作用,在分析瞬时转矩变化的时候可认为电流为恒值[17]。因此,∂ψ(θ,i)/∂θ的符号直接决定了转矩的符号。如果定子磁链对转子角度的变化率>0,瞬时转矩为正;反之为负。因此,只需通过控制定子磁链相对于转子位置的超前或者滞后,就可有效控制电机转矩。
SRM的电压方程为
(2)
式中Uk、Rk、ik分别为k相绕组的电压、电阻和电流。
若忽略绕组电阻上的压降,并将式(2)进行离散化处理,可得
ψ(k)=ψ(k-1)+U(k)Ts
(3)
式中U(k)为电压矢量。即磁链对转矩的控制可以转换为选择合适的电压矢量对转矩的控制。
1.2 传统DTC弊端
传统DTC有以下弊端:
1)滞环控制器的存在使功率器件的开关频率不固定,谐波含量较多;在一个开关周期内,控制电压矢量只根据误差方向选择,造成调节力度过大或过小,引起转矩脉动;滞环宽度过小,开关频率过高,在实际应用中受到软件处理速度和硬件电路的双重限制。
2)磁链给定值ψ*对电机的转矩脉动以及定子电流大小有直接影响。为维持圆形磁场,传统DTC在转子旋转时将不可避免地产生负转矩。
1.3 SVPWM-DTC原理
为解决上述问题,采用一种广泛应用于交流电机中的SVPWM方法。SVPWM方法可以得出准确补偿转矩和磁链误差所需的任意幅值和方向的电压矢量U。该方法主要步骤为:根据转矩误差和磁链误差确定U所处扇区;计算包围该扇区的两个电压矢量和零电压矢量在一个周期的作用时间;得到功率器件的切换时刻。
由于SRM非线性严重,无法直接求出能使转矩误差为0的U。由1.1节知,调节磁链可以达到控制转矩的目的。因此可将U定义为:能使磁链误差为0的电压矢量。
U满足:1)使电机转矩偏差减小;2)纠正定子磁链运动轨迹与给定磁链圆偏差,使控制周期结束时定子磁链矢量矢尖落在预定磁链圆上。
图1为采样时刻t(k-1)时电压矢量选择原理图。Δθ为合成磁链的旋转角度,即磁链变化角;ψ*为k时刻要达到的磁链幅值,即|ψ(k)|=ψ*;ψ(k-1)为当前时刻的定子磁链;Ts为采样周期;U(k)为待求的参考电压矢量。
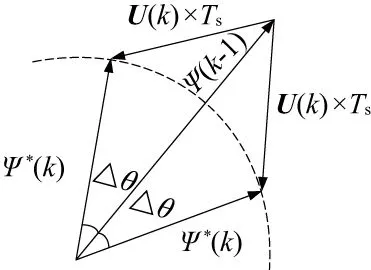
图1 电压矢量选择原理图
若要使磁链矢量由ψ(k-1)运动变化到ψ*(k),则t(k)时刻所需要的电压矢量
(4)
将其表示在静止αβ坐标系中,为:
(5)
(6)
(7)
(8)
将式(7)、式(8)带入式(5)、式(6),即可求得在静止αβ坐标系中所需的空间电压矢量:
(9)
(10)
根据式(9)、式(10)可判断参考电压矢量U(k)所在扇区。电压矢量扇区定义见图2。假设由式(9)、式(10)确定的U位于扇区1,则应选取U1、U6进行矢量合成。由伏秒积分守恒得:
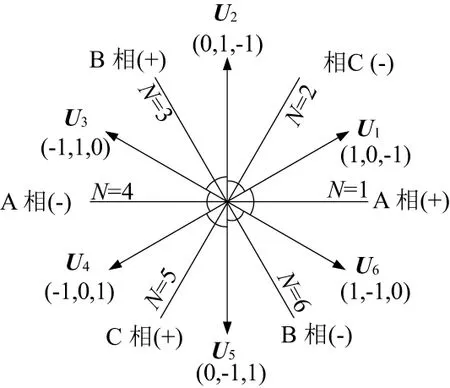
图2 基于SVPWM-DTC的电压矢量空间图
UrefTs=(Uα+Uβ)Ts=U1T1+U6T6+U0T0
(11)
(12)
(13)
(14)
(15)
(16)
当T1+T6≥Ts时,会出现T0<0,此时需进行饱和处理:
(17)
为使功率器件的开关频率恒定且尽可能减小开关频率,本文采用集中式的电压矢量作用方式。仍以U1、U6为例,每个控制周期内各矢量的作用时刻见式(18)。
ts=rem(t,Ts)
(18)
2 变磁链SVPWM-DTC策略
2.1 变磁链SVPWM-DTC原理
综上,Δθ是计算U的关键。文献[17]、文献[24]都仅定量计算Δθ的最大值,并将其设为饱和限幅,见式(19)。文献[25]中的Δθ由转矩偏差量经过PI控制器得到,忽略了Δθ的变化对磁链跟随情况的影响。
(19)
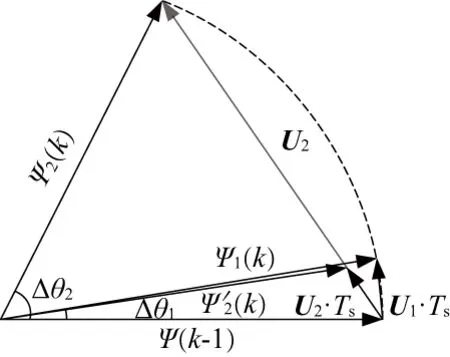
图3 Δθ对参考电压选择的影响
由式(19)可知,Δθ代表了U使电机转矩变化的程度,Δθ越大,U在一个周期内使转矩的改变量越大;反之越小。因此在起动阶段,应合理增大Δθ;而在转矩指令趋于平稳后,应减小Δθ以降低稳态转矩脉动。Δθ之前的正号、负号根据转矩偏差的符号决定,若偏差为正,则Δθ为正;反之为负。
理想的电流分配策略中,各相磁链值无需提供用来中和负转矩的那部分电流。所以,减小电机ψ*尤为重要。
如图4所示,当ψ*由|ψ1|变化到|ψ2|时,若依次选择Δθ为Δθ1、Δθ2和Δθ3,则其分别对应的电压矢量变化情况为:U1→U′1、U2→U′2、U3→U′3。由数学几何关系可知,Δθ=60°时(即1 rad),一个周期内U偏差程度最小。
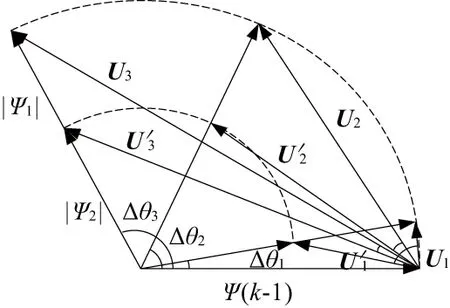
图4 Δθ和ψ*对参考电压选择的影响
2.2 磁链给定值ψ*的选取原则
本文的SRM磁链特性曲线如图5所示。对磁链特性数据进行处理,可以得到三相电感关系如图6所示。三相定子绕组电阻取值为1 Ω。在线性模型中,当某相流经一定电流(在一个控制周期内视电流为常数)时,产生的转矩与电感的变化率成正比[20],而产生的磁链大小与电感成正比。
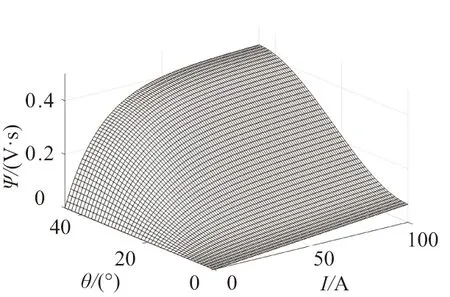
图5 SRM磁链特性曲线
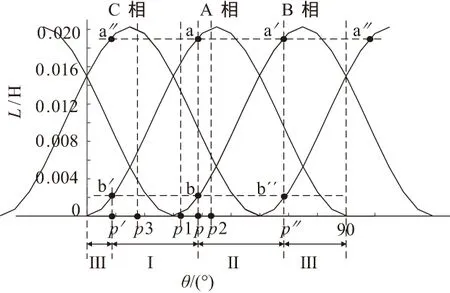
图6 三相电感关系图
假设在位置p处,A相和B相的供力能力一样(即电感变化率一样);在p1处,B相供力能力小于A相;在p2处,A相供力能力小于B相。
空载时,只需保证各相转矩和为0即可,因此可将空载时的磁链给定值固定为一个较小的下限值(本文为0.1 Wb)。
负载时(本文分析均默认负载为正),可分为3种情况:1)定子位置为p1。若ψ*减小,则iB增加,iA减小。因为B相供力能力小于A相,所以iB增加量大于iA减小量,总电流增大。2)定子位置为p2,若ψ*增大,则iB减小,iA增大。因为A相供力能力小于B相,所以iA增加量大于iB减小量,造成总电流增大。3)定子位置为p3,此时出力相只有A相。若ψ*过小,则电流过小,造成出力不足。为了保证合理的力分配策略,负载为正时,均认为负转矩相不出力。
在一个周期(90°)内,两相绕组供力能力相同的位置点共有三个:p、p′、p″。此三点可将一个控制周期分为Ⅰ-Ⅲ三个区间。在区间Ⅰ中,应选择A相作为供力相。即,此时的ψ*应该按照A相在位置p′-p处的磁链-转矩关系进行选择,从而避免:1)p′<θ≤15°时,过高的ψ*引起C相不合理导通;2)30°<θ≤p时,过小的ψ*引起B相不合理导通;3)15°<θ≤ 30°时,过小的ψ*造成单相绕组出力不足。同理,在区间Ⅱ、区间Ⅲ中,应分别选择B相、C相作为供力相。
综上所述,位置p的确定十分关键。因为三相电感变化依次滞后30°,所以图6中b′、a也应相差30°。可进一步转化为:在A相Te-θ-i关系中,找到相差30°的两点m、n,且保证m、n所对应的Te相同,则位置点m、n即为所求。如图7所示,位置点m、n即对应于图6中位置点p′、p。
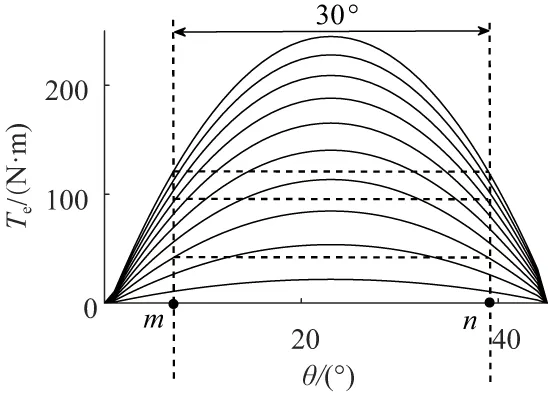
图7 A相Te-θ-i
综合SRM的ψ-i-θ和Te-θ-i,可得ψ-Te-θ。绘制位置点m、n所对应的ψ-Te-θ曲线,并且每隔5°插入一组ψ-Te-θ数据,如图8所示。在负载转矩一定时,不同位置处所对应的ψ*近乎成线性变化。为保证数据精度,同时减小数据的储存量和计算量,本文仅取位置m、n两处的ψ-Te-θ数据,其他位置的数据采用线性插值获取。

图8 A相ψ-Te-θ
综上,本文采用的控制策略为:ψ*根据不同的位置指令以及转矩指令,由位置点m、n处的Te-θ-i数据线性插值获得。Δθ为速度的函数,当电机速度v>30 rad/s时,取0.3,保证电机可以快速调整转矩;当ψ*突变时,Δθ取1,最大程度减小换相时U的偏差;当电机速度v<30 rad/s时,Δθ=0.015v+0.000 5,最大限度保证电机在稳态时拥有最小转矩脉动。
3 仿真实验分析
基于上述理论,SRM的变磁链SVPWM-DTC系统框图如图9所示。在MATLAB/Simulink软件环境中,对同样一台三相6/4极SRM进行仿真分析。
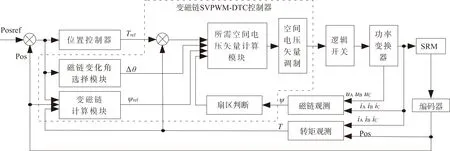
图9 变磁链SVPWM-DTC系统框图
为了研究控制算法优化前后,电机稳态转矩脉动,本文采用转矩峰峰值ΔTPP作为量化指标,定义如下:
ΔTPP=Tmax-Tmin
(20)
分别对传统DTC、SVPWM-DTC及变磁链SVPWM-DTC在空载和带载时进行仿真,如图10所示。并将不同情况下的稳态ΔTPP列于表1。

表1 稳态ΔTPP对比
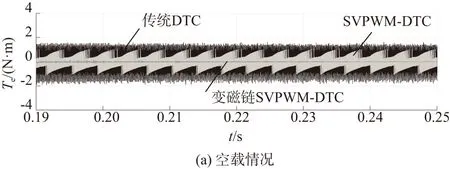
图10 不同控制策略下转矩脉动波形
显然,相较于传统DTC和SVPWM-DTC,变磁链SVPWM-DTC能大幅降低空载及负载时电机稳态转矩脉动;定磁链SVPWM-DTC在空载时的转矩脉动小于传统DTC,但因为Δθ较大,所以在负载时的转矩脉动反而大于传统DTC。
为研究控制算法优化前后,电机位置控制过程的动态响应,使用正反向方波位置指令对电机动态伺服跟随性能进行仿真,结果如图11、图12所示。
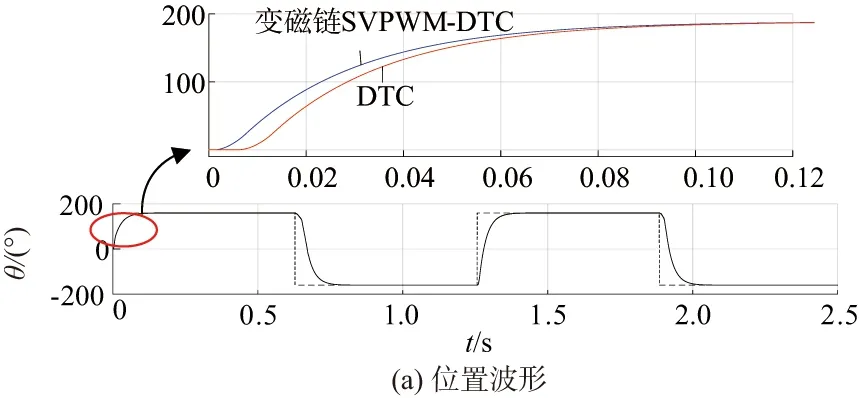
图11 动态伺服跟随性能
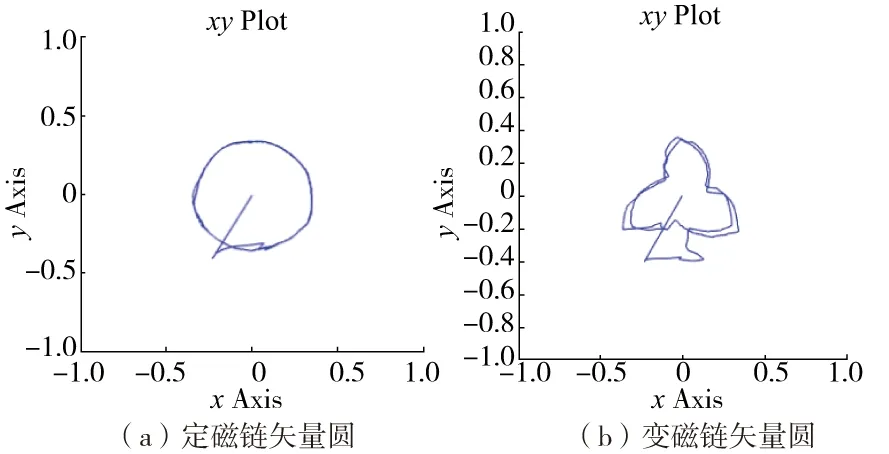
图12 磁链矢量圆对比图
为研究变磁链SVPWM-DTC在变载时ψ*与三相电流值的关系,给出了电机稳态变载的运行波形,如图13所示。此时的ψ*随着负载的变化而变化,且远小于饱和磁链值。三相电流值也随着ψ*的变化而变化,且iA变化程度远大于iB、iC。
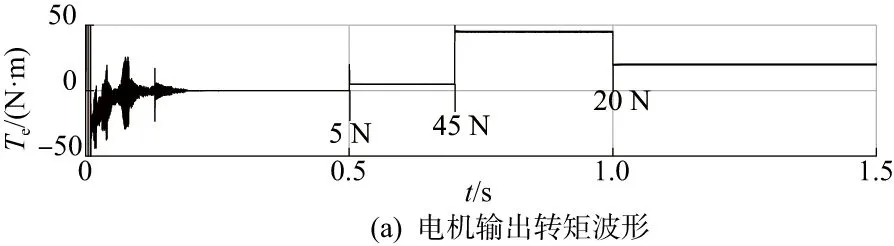
图13 变磁链SVPWM-DTC负载变化时稳态波形
为进一步分析稳态ψ*对定子电流的影响,分别对传统DTC和变磁链SVPWM-DTC在空载、轻载、重载时进行测试,将结果列于表2。
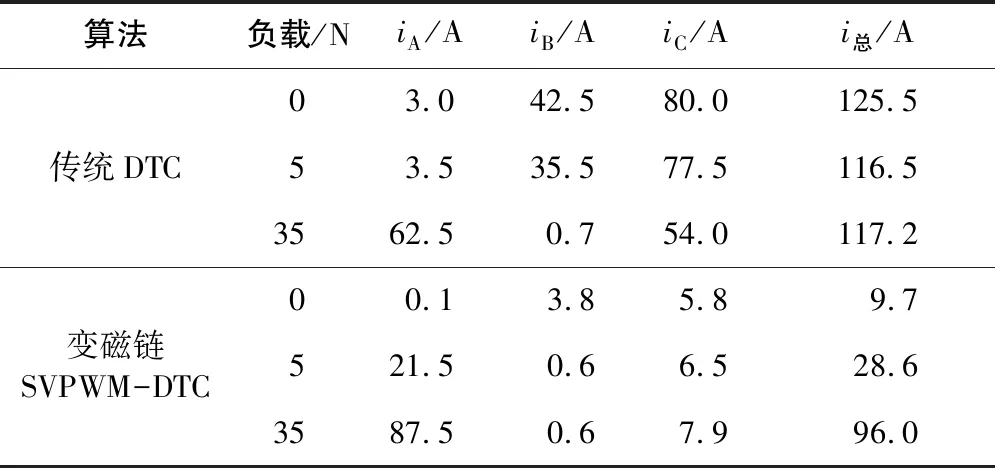
表2 传统DTC与变磁链SVPWM-DTC性能比较
以位置指令190°为例分析,其他位置同理。本文建模时,将电机的0位置设定为A相完全不对齐位置。故稳态时A相和C相处于电感上升阶段,B相处于电感下降阶段,如图6中p′。
1)空载稳态:主要通电相为B相和C相。iC主要用于维持磁链,iB用来平衡C相产生的正转矩。此时ψ*越大,i总越大。
2)定磁链稳态:若轻载,主要通电相为B、C相。iC用于维持磁链,iB用来平衡C相过剩的正转矩。此时iA很小;若重载,因iC无法提供足够转矩,故iA较大。但iA无法提供足够磁链,故iC仍较大。
3)变磁链稳态:轻载、重载均无需过大于iC。
4 结语
本文在传统DTC的基础上,提出了变磁链SVPWM-DTC策略。该控制策略的控制频率固定且减小了转矩的过冲或缺失;结合SRM磁链特性数据的变磁链策略,详细分析SRM运行过程中磁链值的选取原则,解决了稳态定子电流不合理分配的问题,增大了磁链有效利用率。仿真结果显示,变磁链SVPWM-DTC策略不仅能够大幅降低电机转矩脉动,同时也有效降低了功率器件的开关损耗以及定子绕组的铜耗,使位置控制系统具有良好的动、静态性能。
猜你喜欢
大电机技术(2022年3期)2022-08-06
中国特种设备安全(2022年3期)2022-07-08
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
舰船科学技术(2015年8期)2015-02-27
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04