
基于UAV低空航测的矿山地质测量数据分类系统设计
2021-12-25 03:12吕宝利
世界有色金属 2021年17期
吕宝利
(中铁工程设计咨询集团有限公司济南设计院,山东 济南 250000)
UAV又被称为无人机,在应用中,是指使用无线传感设备与遥控设备,按照设定的程序,对不载人的飞行器进行飞行操控的小型飞机。目前,UVA已经被广泛应用到事故现场监测、矿山地质测量、农业生产等领域。相比常规的载人飞机,使用UAV可以执行更多具有一定危险性的任务[1]。同时,由于无人机体型较小,因此也可以使用无人机进行待勘察现场的低空航测。尽管无人机在应用中的优势较为显著,但在进行现场勘查数据的获取时,由于缺少载人飞机对数据的及时处理,因此会导致前端反馈的数据缺少一定的时效性,甚至会使前端反馈的数据出现不规则与无序等问题。为了实现无人机在市场内更多领域的广泛应用,本文将以矿山地质测量工作为例,从硬件与软件两个方面,对基于UAV低空航测的测量数据分类系统进行设计,通过对反馈测量信息的智能化分类,实现矿山地质勘查工作的高效性与质量性。
1 硬件设计
为了确保设计的系统具有真正的地质测量与分类功能,需要在规划其功能前,进行系统硬件结构的设计[2]。如下图1所示。
从图1可以看出,构成本文系统的硬件结构包括UAV航拍仪器、驱动装置、数据采集器、CAM芯片、通信接口。下述将以UAV航拍仪器与采集器为例,进行系统硬件结构的设计。

图1 数据分类系统硬件结构
在进行UAV航拍仪器结构的设计时,应考虑到此系统是应用于矿山地质测量的系统,因此航拍的摄像头应当参照线阵相机进行设计。此种摄像头在完成对地图数据的获取后,会向接收端传输大量的POS数据,数据经过驱动后自主进行投影。为了确保投影的数据可以满足矿山作业需求,在摄像头上集成一个面阵传感器,传感器通过感知数据的返回路径,对其进行规划与拼接,以此种方式便可以达到对现场图像信息有效反馈的效果。
采集器的电源由单片机集成,单片机运行后可产生一定的电压,此时系统内的驱动装置将根据需求端的需求电压,进行采集设备的供电。通常情况下,采集器的传输程序可根据web端网络的运行,进行电压信号的预测,并在完成预测后,向前端输送3.0V的电压。当单片机实现电压数据的转换后,便可以实现对数据与拍摄信息的针对性获取。
2 软件设计
2.1 基于UAV低空航测的数据特征提取
在硬件结构的支撑下,下文将对系统的软件功能进行开发。在此过程中,使用UAV低空航测技术,进行测量数据特征的针对性提取。考虑到无人机获取的数据是由点、线、面等信息集成构成的,因此,在提取特征数据时,仅需要根据拍摄端获取的数据集合进行融合处理,并提取其中数据的高阶特征,便可以实现对数据的分类[3]。假定高阶特征量表示为z,对应高阶特征在无人机传输端的回归方程表达式如下:


公式(2)中:y(t)表示为UAV低空航测中每个对应维度t内的空间信息状态;P表示为数据嵌入维度;τ表示为无人机的有效测量范围(通常情况下,取值为120.0°)。在完成上文研究后,进行测量数据的融合,提取融合中超过有效测量范围的前端数据,将此部分数据作为测量过程中的高维数据,实现对数据特征的提取。
2.2 特征数据内核分类端设计
通过设计特征数据内核分类端,可以实现人工操作分类行为的解放,在设计过程中,可将上文获取的高维度数据通过通信接口进行秩序导入。此时,特征数据的分类端将根据最优分类原理,进行测量数据特征向量机的分解,并将分解后的数据按照局部支撑内容,进行最优平面的分类。在此过程中考虑到UAV航拍仪器获取的特征信息也可能存在局限,因此,需要在完成数据导入后,定位特征信息的所在端,进行任意矢量的匹配,并将匹配后的信息通过采集器获取。此过程可用下述计算公式表示:

公式(3)中:ci表示为任意矢量i的匹配过程;Xs表示为采集器对匹配结果s的获取,其中s的取值在[1~n]范围内;ωi表示为对矢量i所在端的定位过程;Xi表示为对矢量的获取过程;n表示为匹配行为发生次数;i表示为采集信息内的任意特征矢量。按照上述计算公式,完成n次匹配行为,从而实现对前端测量数据的分类,完成本文系统软件功能的开发。
3 实验
结合本文上述论述内容,从硬件层面和理论层面实现了对数据分类系统的设计,为了验证该系统在实际应用中的可行性及效果,选择将基于无人机倾斜摄影测量的数据分类系统作为对照组,将本文基于UAV低空航测的数据分类系统作为实验组,开展如下对比实验:
选择将某进行矿产资源开发的矿山项目作为依托,针对该项目当中的矿山,在获取到其各类地质测量数据后,分别通过实验组分类系统和对照组分类系统对其进行分类和存储。在该矿山内,将矿山每2平方公里作为一个研究区域,共划分为5个研究区域,对五个2平方公里的研究区域矿山地质数据进行获取。已知每个区域测量数据规模为1000MBit,数据当中包含了t1、t2和t3共三个类别属性,为了方便验证,人为将三个类别当中的数据设定为对应数据规模,并将两种系统运行后得出的结果与设定的数据规模进行对比,计算分类系统的误分率δ,其中δ的计算公式为:

公式(4)中,W表示为系统给出的分类结果数据量;Wti表示为某一类属性当中对应的真实数据规模,其中属性的取值为1、2、3。按照上述公式,计算得出实验组和对照组的值,并绘制成表1。
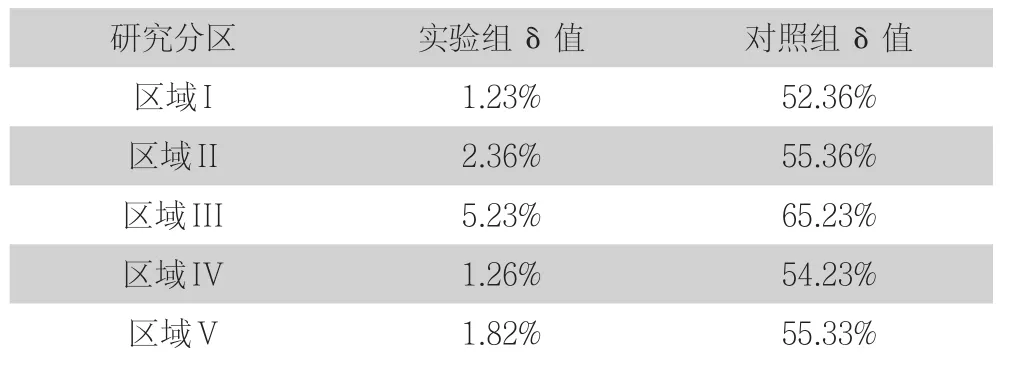
表1 实验组与对照组δ值对比
结合表1中数据得出,实验组的δ值均在5.50%以下,而对照组的δ值均超过50.0%。因此,通过上述实验证明,本文提出的分类系统在应用到实际矿山地质测量数据对其进行分类时,误分率更低,分类结果精度更高。
4 结束语
本次研究从硬件与软件两个方面入手,在完成实验后,通过实验对比的方式,证明了设计的系统具有一定实用性,但此次实验研究选择的参照对象较少,仅选择了一个矿山作为研究对象,实验结果可能存在偶然性,因此,可在后期的研究中,通过设置多个研究对象的方式,对本文设计成果加以讨论,实现对系统功能的完善。
猜你喜欢
轻工机械(2022年1期)2022-03-23
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
现代仪器与医疗(2021年1期)2021-06-09
陕西科技大学学报(2020年5期)2020-10-12
时代邮刊·下半月(2020年9期)2020-09-23
当代工人·精品C(2020年1期)2020-05-20
阳光(2020年5期)2020-05-06
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
