
具有数据包丢失的网络化Markov跳变系统故障检测
2021-12-24 05:15孙晓玥刘丽香徐雅婷王燕锋
湖州师范学院学报 2021年10期
孙晓玥,刘丽香,徐雅婷,王燕锋
(1.湖州师范学院 工学院,浙江 湖州 313000;2.莘县第一中学,山东 莘县 252400)
0 引 言
网络控制系统(Networked Control Systems,NCSs)是通过网络将传感器、控制器和执行器连接在一起形成的一个闭环控制系统[1].随着通信技术、计算机科学技术和控制技术的发展,NCSs技术有了很大的进步.与传统的点对点的控制系统相比,NCSs具有系统布线少、成本低、维护与扩展方便等优点[2],在远程医疗、航空航天等领域具有广泛应用,这给人们的生产和生活带来了极大的便利.
在NCSs中,网络信道将控制系统的各个节点与多个控制子系统连接在一起.网络堵塞、网络诱导时延、网络节点发送数据时存在竞争关系等问题都会导致数据丢失[3],很大程度地影响了控制系统的性能.在系统出现故障时,丢包会导致故障检测信息不完整,容易出现故障的错报和漏报.当前的许多研究都集中于控制器设计及系统的稳定性问题,对故障检测的研究相对较少.随着NCSs中元件的老化、外部扰动及工作环境的变化,系统不可避免地出现各种故障[4].NCSs的故障检测问题是一个具有实际意义的课题,得到了学者们的广泛关注,成为目前研究的一个热点.
目前,关于NCSs故障检测的文献可以分为三类:第一类只考虑数据包的丢失.如文献[5]讨论了传感器和控制器(S/C)之间数据包丢失的网络控制系统故障检测,提出了一种故障观测器结构,当发生数据包丢失时,将先前成功传输的系统输出用于观测器反馈,假设连续数据包丢失是有限的,观测器误差的变化可以建模为一个交换系统.第二类只考虑时延.如文献[6]考虑具有时延的分布式网络控制系统(DNCS)故障检测问题,提出一种基于滑模观测器的两级 DNCS 故障检测方法,并考虑两种不同情况:当系统的所有状态都可以测量时,将故障检测问题转换为滑动稳定可达问题;当系统的某些状态不可测量时,通过设计一个变换矩阵来分离可测状态和未知状态,然后针对这些未知状态开发不同的滑模观测器,从而实现故障检测.文献[7]解决了具有不确定时变时延的NCSs,并基于观测器的鲁棒故障检测滤波器设计和优化问题具有不确定时变时延的NCSs,通过矩阵理论建模为参数不确定系统.第三类同时考虑时延和数据包丢失.如文献[8]考虑一类具有时变延迟的网络控制系统,故障检测是在传感器数据中存在输出延迟和丢包的情况下进行的.增加控制器中的采样频率并等分传感器采样周期,时间延迟近似为控制器采样周期的整数倍,并结合控制器数据到达条件,构建基于离散异步动力系统的故障观测器误差方程.
上述文献的研究对象为线性系统,在实际的工程应用领域许多系统所展现出的特性通常不是特定的,其结构和参数有时会具有随机变化的特征,很难用确定性的模型来描述.本文以Markov跳变系统为研究对象.Markov跳变系统作为一类特殊的混杂系统,在电力系统、制造系统、通信系统,以及同时涉及随机决策和连续控制的系统中都有广泛应用,如由零部件故障、外部环境突变等原因引起的系统结构和参数变化都可认为是多模态线性系统间的随机切换.本文的研究意义有以下两点:
(Ⅰ)考虑S/C丢包,通过在控制器端构造观测器,以产生残差和实现基于观测器的输出反馈控制,从而建立系统闭环模型.
(Ⅱ)通过构造Lyapunov函数,得到闭环系统稳定的充分条件,并给出控制器增益矩阵、观测器增益矩阵和最小干扰抑制指标的求解算法.
1 问题描述
在传感器与控制器(S/C)之间存在数据包的丢失、控制器与执行器(C/A)之间不存在数据包丢失的情况下,网络化Markov跳变系统的状态方程为:
(1)

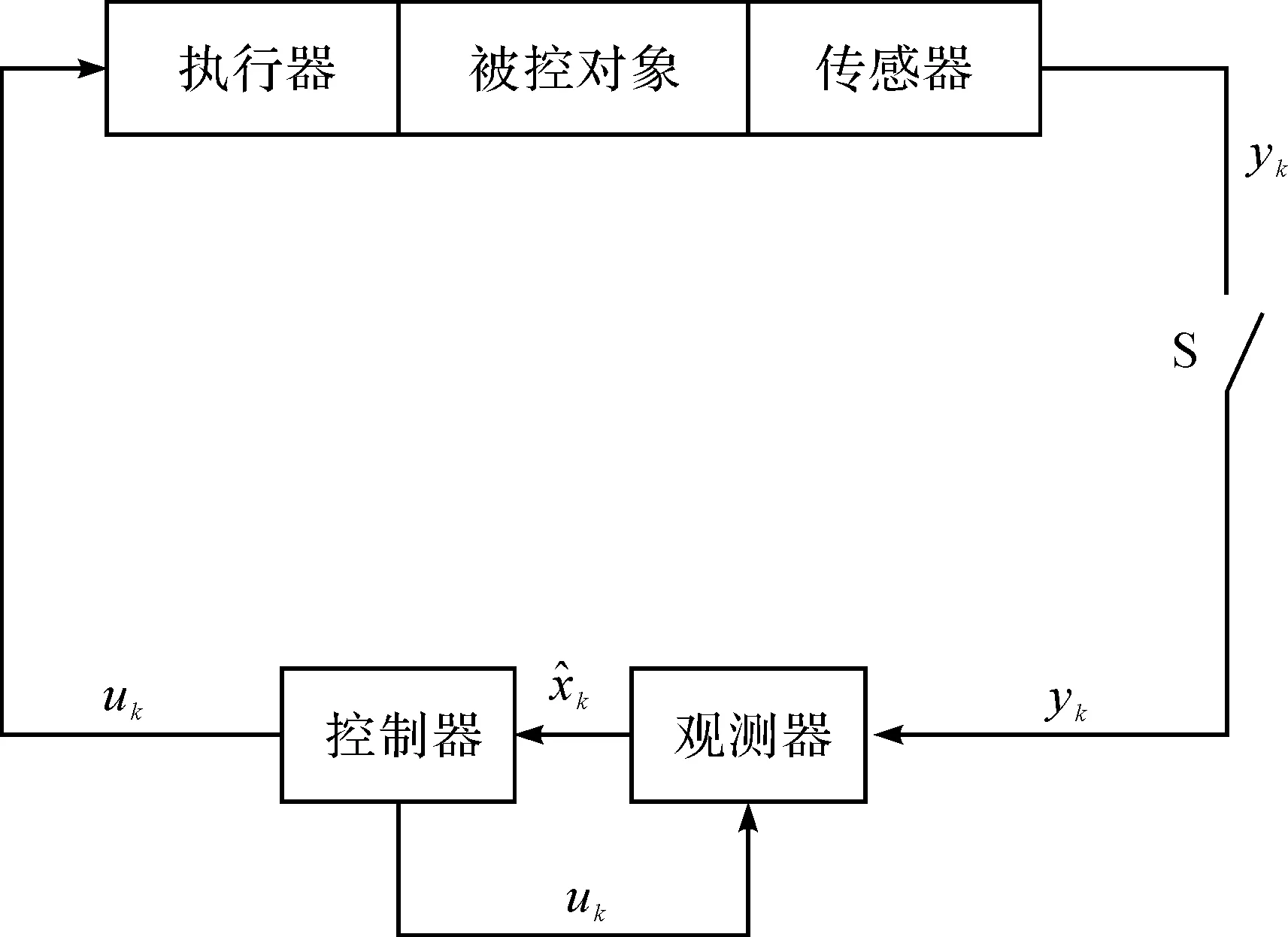
图1 具有数据包丢失的NCSFig.1 NCS with data packet dropout
随机变量αk代表开关S的状态,并从集合{0,1}中取值.当αk=0时,开关S打开,数据包丢失,信息传输失败;当αk=1时,开关S闭合,信息传输成功.
构造状态观测器:
(2)
(3)
其中,K为状态反馈控制器的增益矩阵.
由于在S/C之间存在数据包的丢失,所以k时刻在控制器节点的系统输出为:
(4)
定义状态估计误差ek和增广矩阵ζk:
从式(1)~(4)可以得到闭环系统的状态方程为:
(5)
其中,
(a)当αk=0时,S/C之间存在数据包的丢失,闭环系统(5)可表示为:
(6)
其中,
(b)当αk=1时,S/C之间不存在数据包的丢失,闭环系统(5)可表示为:
(7)
其中,
当数据包发生丢失时,闭环系统(5)在系统(6)~(7)之间跳变.因为当前时刻数据包的丢失与上一时刻数据包的丢失有关,所以可以把闭环系统表示为:
(8)
其中,{θk,k∈Z}为离散时间Markov链,在集合={1,2}中取值,θk的转移概率矩阵为
选择如下残差评价函数:
(9)
选择的故障检测阈值为:
(10)
其中,ρ0为初始评价时刻,L0为评价步长.
通过对比Jk和Jth即可检测出是否有故障发生:
(11)
本文的目标是考虑S/C侧数据包的丢失,设计故障检测观测器(2)和基于观测器的反馈控制律(3),使得
(Ⅰ)当ηk=0时,闭环系统(8)随机稳定;
(Ⅱ)在零初始条件下,
(12)
其中,ηk=0为干扰抑制性能指标.
2 主要内容
定理1当ηk=0时,如果存在正定矩阵Pm,i>0,Ym,i>0和矩阵K、L,使得
(13)
Pm,iYm,i=I,
(14)
其中,
对所有的m,n∈φ,i,j∈成立,则闭环系统(8)是随机稳定的.
证明对于闭环系统(8),当ηk=0时,考虑如下的Lyapunov函数:
其中,Pδk,θk>0.
由Schur补引理得:

因此,若定理1中式(14)成立,则闭环系统(8)是随机稳定的.证毕.
定理2当ηk≠0时,对给定的标量Pm,i>0,以及残差增益矩阵Pm,i>0,如果存在矩阵Pm,i>0,Pm,i>0和正定矩阵Pm,i>0,Ym,i>0,使得如下不等式成立:
(15)
Pm,iYm,i=I,m∈φ,i∈,
(16)
其中,
Γ22=Diag{-I,-Y1,1,-Y1,2,…,-Yg,2}.
则闭环系统(8)是随机稳定的,且满足H∞性能指标(12).
证明当ηk≠0时,由式(8)可得:
其中,
运用Schur补引理:

(17)
将式(17)从k=0到k=∞进行累加,可得:
由上式可得:
证毕.
3 数值仿真
考虑如下状态方程:
其中,
δk∈{1,2}.

根据定理2可得到的控制器增益矩阵、观测器增益矩阵和最小干扰抑制性能指标如下:

图2 闭环系统模态δkFig.2 The mode of the closed-loop system δk

图3 数据包丢失模态θkFig.3 Data packet dropout status θk
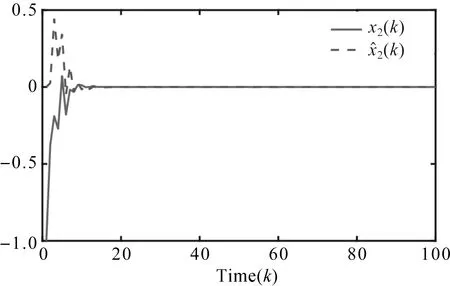
当没有故障发生时,图4和图5表示闭环系统的状态.当故障发生时,图6和图7表示故障残差rk和函数Jk的图像.由图6和图7可以看出,当故障发生时,故障残差rk和函数Jk都发生了变化.另外,我们可以得到J14=3.451 7 图4 闭环系统x1的状态和观测值Fig.4 Closed-loop system status x1 and its 图5 闭环系统x2的状态和观测值Fig.5 Closed-loop system status x2 and its 图6 残差信号Fig.6 Residual signal 图7 残差评价函数和阈值Fig.7 Residual evaluation function and threshold 本文对一类基于观测器具有数据包丢失的网络化Markov跳变系统故障检测问题进行了研究,考虑S/C之间存在数据包丢失情况,建立了闭环系统的数学模型,得到了闭环系统随机稳定的充分条件,并给出了控制器增益矩阵和观测器增益矩阵的求解方法.仿真结果表明,该方法有效可行.


4 结 论
猜你喜欢
计算机与数字工程(2022年3期)2022-04-07
民用飞机设计与研究(2020年4期)2021-01-21
中国交通信息化(2020年4期)2021-01-14
防爆电机(2020年4期)2020-12-14
中华养生保健(2020年3期)2020-11-16
北京航空航天大学学报(2020年10期)2020-11-14
中国惯性技术学报(2019年3期)2019-10-15
物联网技术(2018年8期)2018-12-06
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年24期)2017-02-02
