
基于BIM与物联网传感的登高车安全管理技术研发
2021-12-22 06:38陈渊鸿
建筑施工 2021年9期
陈渊鸿 陈 燕 陈 禹
上海建工集团工程研究总院 上海 201114
随着城市化进程加深,城市空间逐步向高空发展。在大型工程建设过程中,登高车是常用的登高作业平台。在实际操作过程中,由于登高车存在部分视觉盲区,操作人员往往无法判断登高车平台与结构之间的间隙[1-4],因此,作业过程中常常出现碰撞问题,甚至导致倾覆、设备损坏等事故。
为了减少登高车作业过程中平台与主体结构的碰撞问题,本文基于BIM技术,研发出GPS模块定位与RFID通信这2种登高车防撞安全管理系统,基于BIM模型设计行进路线、作业位置、顶升姿态等,通过物联网感知技术对登高车平台周边障碍物进行感知,针对可能出现的安全隐患进行预警,从而最大程度地减少碰撞事故风险。
1 基于BIM与GPS的登高车安全作业技术
1.1 系统结构与原理
1.1.1 系统结构
本系统由GPS感知子系统、虚拟仿真子系统和预警系统组成,虚拟仿真子系统分别与GPS感知子系统和预警系统连接。GPS感知子系统包含若干GPS感应模块,布设于登高车平台护栏周围边角等容易碰撞部位,可通过卫星定位感知模块所在位置坐标。虚拟仿真子系统搭载于现场服务器,计算机中存储现场作业区域BIM模型,制定登高作业专项施工方案时,在BIM模型中划分安全作业区域,并对车辆行走路径、作业时登高臂姿态等进行三维模拟,确定作业方案,并将模拟确定的优化方案相关信息存储于BIM模型。此外,登高车模型中具有GPS模块信息,预留GPS模块位置信息接口,根据安全规范要求设置安全距离要求。预警系统包括报警喇叭、报警显示屏和报警灯等模块,可接收服务器发出的预警信息。当感知系统检测到登高车位置处于危险状态时,触发预警系统对操作人员和相关安全管理人员进行提醒,并在模型中定位坐标进行展示,避免发生碰撞事故,提高安全管理效率。
1.1.2 系统运行原理
BIM技术是以工程设计、施工、管理控制为系统的数据化工具,是数字化建造的主要组成,通过建立虚拟模型,为施工作业提供清晰完整、契合现场的数据库。借助这个包含建筑工程信息的三维模型,大大提高了工程的信息集成化程度,从而为工程项目的相关参与方提供一个工程信息交换和共享的平台。
GPS技术通过其准确、智能的定位能力成为当前位置定位的主要技术之一,用户可利用GPS技术获得准确的位置信息等相关数据。再通过互联网媒介将位置信息传给所需连接的设备,连接设备通过对该信息进行数据的计算和变换(如地图投影变换、坐标系统的变换等)后再传递给相关移动终端,以得到具体细致的位置信息。GPS定位技术的精度最高可达到0.1 m。
系统对传统登高车进行改造,将BIM模型与GPS模块采集的点位信息相结合,首先建立登高作业区域BIM模型,该模型包含作业区结构、大型机械、道路、堆场、基坑围护等信息,还具有登高车模型,同时搭载GPS模块,并设置该模块感应数据的接口。确定作业方案时,首先通过BIM模型确定登高车的进场及行进路径、登高作业位置及作业方案,确保作业安全。将该路径关键位置坐标存储于BIM模型,并搭载于现场服务器。作业时,登高车平台上搭载的GPS模块通过卫星定位定时获取位置坐标信息,待所有信息汇总存储至服务器后,服务器将传感信息与模型信息进行分析比对,当所测路径与规划路径偏移、临近危险作业区域或将与邻近结构碰撞时,通过预警系统进行预警,实现登高车防撞报警功能,为现场的安全施工提供了保障。另一方面,驾驶人员通过移动终端访问服务器,可在驾驶舱中查看登高车所在状态,接收预警系统传出的风险信息。本系统将GPS模块应用于机械设备中,实现登高车的智能防撞报警、精确定位功能,实现了工地现场智能化、信息化。
1.2 技术应用方式
如图1所示,GPS型防撞登高车对车体进行了改造,为保障最大限度减少碰撞,此类登高车将传统的长方形平台改造成正方形。正方形样式车体对GPS数据精度的采集具有较好的效果,定位准确性较高。操作台围栏边缘位置部署GPS模块,实时采集现场工作登高车车体的位置信息,配合使用BIM三维模型进行计算,从而得出整个检测物的整体点位信息,进而设定登高车安全活动区域的边界点。得到位置信息后,将定位信息传输至服务器;服务器将接收到的登高车车体的位置信息与BIM模型中的安全区域进行比对,使登高车在超出安全区域时会及时预警,预警信号通过报警系统对终端发送相关指令,最终指导操作人员控制登高车做出相应的规避动作。
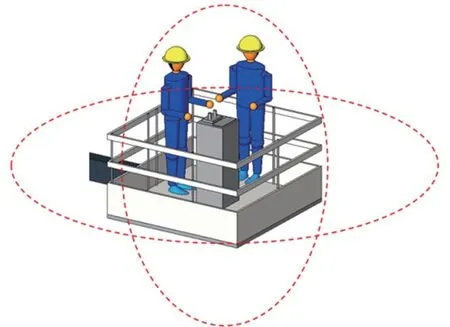
图1 GPS型防撞登高车防撞报警系统
2 基于BIM与RFID的登高车安全作业技术
2.1 系统结构与原理
2.1.1 系统结构
本文研发的基于BIM与RFID登高车安全作业技术包含接近检测系统、RFID定位系统、虚拟仿真系统及安全预警系统等多个系统。检测系统采用激光雷达传感测距技术,不受光照影响,能量集中,具有很高的灵敏度和分辨率,抗干扰能力强,可准确测定登高车护栏边缘与结构的距离。RFID定位系统由RFID芯片及RFID读卡器组成,RFID芯片搭载于登高车平台,读卡器安装于作业区附近结构边缘位置,读卡器读取芯片发射的信号,通过信号强弱判断距离,通过三角定位算法得到坐标。虚拟仿真系统搭载于服务器,包含作业场景、危险源、行进路径及登高车作业方案等详细信息,安全预警系统的结构及技术与BIM结合GPS系统的安全预警系统有着相似性,都是通过系统与终端服务器相连接。当设备在进行登高作业出现安全隐患时,可触发预警信号进行设备预警,预警的方式有:报警声、报警信息提示、打开报警灯等。
佟老板来到鱼塘时,我以为是来钓鱼的,就把一杆小称递过去,同时把一块写了价格的牌子指给他看。城里来钓鱼的都知道我的价格,我的价格也不贵,比市场上便宜得多,纯野生的鲤鱼每斤四块五,草鱼六块,黑鱼八块。城里经常有人来钓鱼。我对城里人是不拒绝的。我说欢迎来钓鱼,我看你是第一次来,到这里钓鱼有个规矩,钓到的鱼必须买走,你找了乐呵,我也赚点酒钱。
2.1.2 系统运行原理
基于BIM与RFID的登高车安全作业系统运行原理如图2所示。该系统通过激光雷达测距技术和RFID定位技术相结合,在车体的操作台部分装设激光雷达传感器和RFID芯片,同时通过连入本地服务器对接激光雷达传感器和RFID读卡器,车体所搭载的RFID读卡器在进行作业时,通过读取RFID芯片来发射相关数据信号。
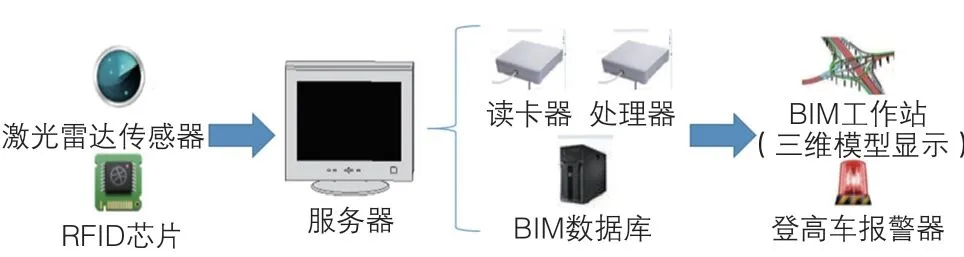
图2 RFID防撞登高车原理
防撞登高车所配备的激光雷达传感器可通过4个方位进行探测预警,通过4个方位数据预设区域进行雷达探测,一旦区域内出现障碍物,传感器立即把相关数据信息传送到本地服务器,随后RFID芯片预向读卡器进行信号发射,最终登高车将通过报警系统提示操作人员相关风险,RFID读卡器读取RFID芯片发射的信号并传输到处理器,通过三角定位算法计算得到登高车所在坐标位置,将相应数据同步至BIM数据库,并将防撞登高车所处的位置信息在三维模型中表示出来;现场工作人员通过三维模型可以及时查看登高车所检测的位置信息以及使用的相关状态,一旦出现突发紧急状况,工作人员也能够及时赶到事发位置进行现场支援。
2.2 技术应用方式
以BIM技术为基础,将RFID芯片技术融入登高车以达到安全作业的目的。此类型改造,是在设备上装载RFID芯片和激光雷达传感器,通过芯片、雷达的技术结合来实现区域定位以及智能防撞效能,通过4个方位的数据预设区域进行雷达探测,一旦区域内出现障碍物,传感器立即把相关数据信息传送到本地服务器,随后RFID芯片预向读卡器进行信号发射,最终登高车将通过报警系统提示操作人员相关风险。
现场工作人员通过登高车进行登高作业时,登高车到达服务器RFID读卡器所覆盖的预定范围时,附近的RFID读卡器即迅速激活车体上搭载的RFID芯片,来精准定位登高车所在位置区域,同时由终端处理器在移动端上以BIM三维模型将情况进行现场展示,实现现场相关情况的全局掌握,进而提高了操作的安全性。
同时,设备服务器所搭载的RFID读卡器可以准确识别相关RFID芯片,通过芯片连接服务器,再以三维模型进行显示。
3 BIM与物联网登高车安全作业技术应用
某大型市政工程为穿越主城区主干道,设计车速80 km/h,双向6车道,两侧设非机动车道及人行道,红线宽度60 m。为了最小限度降低施工作业影响,采用预制桥梁进行建造,利用登高车辅助完成部分高处作业工作(图3)。该项目为重大市政工程,作业覆盖面广,对作业安全性有极高要求。为了提高登高作业安全性,降低施工风险,采用基于BIM与GIS的登高车安全作业技术进行施工。
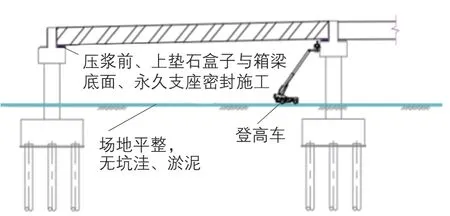
图3 登高车辅助高空作业立面示意
登高车主要技术参数如表1所示。
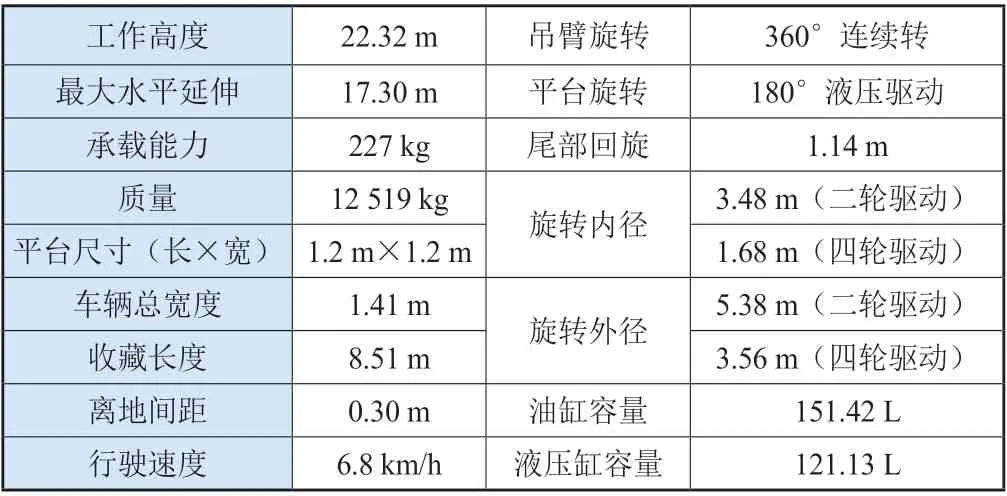
表1 登高车主要技术参数
本系统主要应用内容有如下几个部分:
1)登高作业方案模拟。通过BIM模型设置登高车运行路径、停靠位置、关键姿态等,模拟分析登高作业方案,优化作业方案,减少可能存在的安全隐患,基于三维模型进行可视化交底(图4)。
图4 登高车BIM作业模拟
2)登高车作业位置管理。服务器汇总登高车定位信息,并在三维BIM模型进行定位。使用登高车进行工作前,首先通过GPS模块采集检测物上某个点位的坐标信息,服务器配合使用BIM三维模型计算出整个模型所有的点位信息,继而在三维模型上设定登高车活动的安全区域,如假设登高车4个方位离检测物的距离不得小于1 m,通过GPS技术采集安全区域边界线的点位信息,将登高车点位信息与安全区域点位信息比对,通过BIM三维模型展示现场环境,同时结合GPS技术对现场安全区域的点位信息进行采集,实时在线掌握现场登高车工作情况,管理人员可集中管理登高车所在位置信息,操作人员可通过移动终端查看自身所在位置。
3)登高车作业风险预警。登高车在工作时,通过GPS技术实时采集登高车的点位信息,传送至服务器,通过服务器中BIM数据库对登高车点位与安全区域边界点位信息进行计算分析,一旦发现运行轨迹超出运行范围、进入危险作业区域或点位计算得出距离小于设定值,系统会立即发送指令给登高车的报警系统,登高车的报警器会发出报警声,提醒现场人员停止登高车前进并退回至安全区域,避免现场登高车与检测物发生碰撞,实现登高车防撞报警功能。GPS防撞登高车同时结合GPS技术对现场安全区域的点位信息进行采集,通过线上移动端实时掌握现场登高作业相关情况,防止出现安全隐患的相关操作,以达到规避安全风险的目的,有效减少施工现场安全事故的发生。
4)安全作业指引。通过在登高车上GPS设备反馈信息,对登高车点位信息与安全区域点位信息比对,通过BIM三维模型展示现场环境,指引现场作业人员进行登高作业。
4 结语
本文将BIM技术与物联网传感技术相结合,分别基于GPS与RFID传感技术,研发了2种基于BIM技术的登高车防撞技术,该技术具有以下优势:
1)GPS防撞登高车与RFID防撞登高车的使用避免了人员操作的高度视觉盲点,降低了登高工作中出现事故的概率。同样适用于各种复杂的登高作业,通过对“路径”和“空间”的设定,能够有效地避免操作作业中的各种碰撞事件。
2)两类防撞登高车基于BIM技术而设定,因此,登高作业过程也可以在BIM平台得到记录显示,操作人员可在平台上模拟实施登高作业,以排查作业中出现的各种安全隐患。
3)防撞登高车所搭配的设备及技术性价比高,对工作效率的提高及安全作业有着较好的使用效果。
猜你喜欢
电脑爱好者(2020年17期)2020-09-14
铁道通信信号(2019年9期)2019-11-25
小哥白尼(趣味科学)(2018年12期)2018-12-18
汽车工程师(2018年1期)2018-07-13
网络安全和信息化(2017年10期)2017-03-08
电子技术与软件工程(2016年24期)2017-02-23
中国公共安全(2017年11期)2017-02-06
中国公路(2017年13期)2017-02-06
知识产权(2016年8期)2016-12-01
网络空间安全(2016年3期)2016-06-15
