基于MVDR近场聚焦波束形成的管道缺陷声源定位
2021-12-22 09:18贾笑云王秀清
天津科技大学学报 2021年6期
贾笑云,王秀清,胡 烨
(天津科技大学电子信息与自动化学院,天津 300222)
波束形成(beamforming,BF)方法[1]是一种基于传声器阵列测量的噪声源识别技术.它是由多个传感器按照空间位置进行固定,形成阵列采集和处理声源信号,进而获取声场分布情况[2],被广泛应用于各个领域[3],受到研究人员的关注[4].聚焦波束形成方法,可以满足近场声源的需求,其中常规近场聚焦波束形成可以有效解决大尺寸、复杂系统的噪声源定位问题,具有良好的宽容性和易操作性.最小方差无畸变响应[5](minimum variance distortionless response,MVDR)聚焦波束形成方法是一种能超越瑞利限的高分辨近场定位算法,与常规的聚焦波束相比较,其参数设置更加广,也同样适用于大尺寸、中高频的噪声源近场定位.
对于波束形成方法,Kook等[6]将最大似然估计法运用在运动目标定位上,利用近场聚焦波束形成,得到汽车表面噪声源分布图.王建新[7]将传感器阵列与波束形成相结合识别噪声源位置.毕杨等[8]通过聚焦方法对波束形成算法进行优化,进而获得了更好的波束形成效果.张书仙等[9]将数字波束形成技术应用于单站测控系统中,实现了对多目标的测控效果.韩闯等[10]建立水平柱面测量模型,实现柱面声源分辨定位.陈欢等[11]提出了MVDR近场聚焦波束形成识别算法,估计水下噪声源的相对强度.目前,该方法大多数情况都被用于对噪声源进行定位分析,在管道缺陷识别领域应用较少.
管道缺陷定位的方法包括声波方法和基于机理模型的方法等.郎宪明等[12]提出采用超声波声速变化量的定位方法,对管道泄漏点进行定位.郑晓亮 等[13]提出线性阵列两步定位方法对管道泄漏位置进行定位分析.针对MVDR近场聚焦波束形成方法对于管道柱面声源的识别较少且都是基于空间直角坐标系的方式,为了更直观评价识别距离和角度误差,本文将MVDR近场聚焦波束形成方法进行改进,将空间直角坐标系转化为(z,θ)的形式,分别对轴向和周向进行声源识别定位.建立管道柱面模型,对声源点和阵元之间的距离进行理论推导,经过仿真分析,得到MVDR近场聚焦波束形成方法的声场分布强度图以及三维空间图,并分析声源信号频率、声源半径、阵元数以及阵元间距等因素对声场分布强度的影响.对轴向和周向识别定位偏差进行分析,给出可以对管道缺陷声源位置进行识别定位的最佳参数范围.
1 柱面MVDR近场聚焦波束形成方法
1.1 实验模型
大多数管道呈圆柱体状态,故选取水平柱面实验模型.将管道缺陷的声发射信号当作点声源,以管道中心为原点建立空间直角坐标系(x,y,z).其中,设x=rcosθ,y=rsinθ,可将坐标位置转换为(z,θ),r为圆柱半径.
如图1所示,R0=a代表管道柱面半径,声源点位置为M(z,θ),z表示距离中心原点的横向距离,θ表示点M在x-y平面的投影到x轴的角度值,以此坐标建立柱面模型.
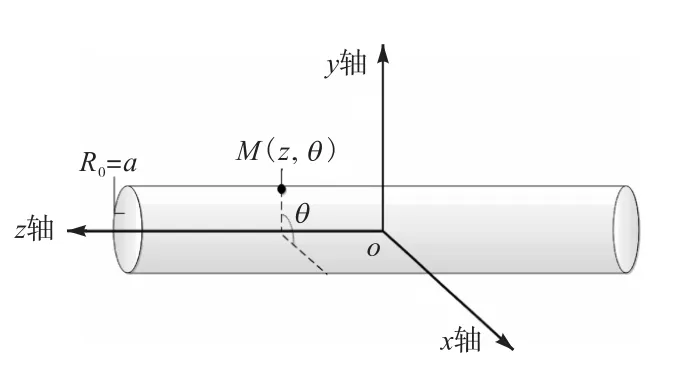
图1 实验模型 Fig. 1 Experimental model
1.2 基本原理
假设声源点I空间坐标为(xi,yi,zi),阵元n的空间坐标为(xn,yn,zn),则声源点I与阵元n之间的距离可以表示为

假设xi=rcosθi,y=rsinθi,则声源点I空间坐标可以表示为(zi,θi),阵元n空间坐标可以表示(zn,θn),则声源点与阵元之间的距离最终可以表示为

假设p1(T)表示柱面测量面上第I个信号源,沿z轴方向传播的某单位幅度声发射信号p1(T)可以表示为

则阵元接收的声发射信号可以表示为

其中:
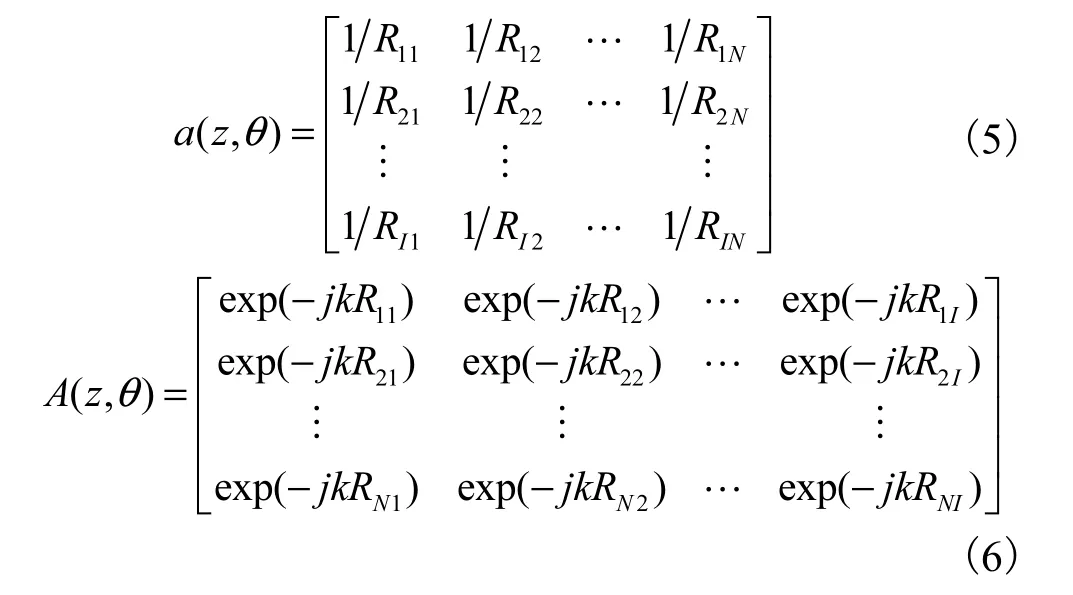
k为波数,k=2πf/c;f为声源信号频率;c为声速;n1为引入的随机噪声.
在柱面坐标系建立的约束条件为

构造协方差矩阵F=E(P(T)P(T)H),采用拉格朗日构造函数

对式(8)取微分并令其为0,u为常数,则

其中:b(z,θ)代表扫描面上的相对补偿向量,r0(z,θ)代表扫描面上归一化幅度补偿向量.

其中rn表示扫描点到阵元的距离.
MVDR近场聚焦波束形成空间谱可以表示为

在不考虑幅度补偿的情况下,MVDR近场聚焦波束形成空间谱形式[11]可以表达为

柱面MVDR近场聚焦波束形成算法的具体实现过程:首先,建立柱面坐标模型,假设声源点坐标位置,将空间直角坐标转化为(z,θ)形式,通过一系列的理论推导,给出声源点与阵元之间距离的理论表达式;然后,根据声源信号频率、声速、波数等相关信息,通过理论推导计算获取某单位幅度的声发射信号值,再根据式(3)、式(5)、式(6)确定阵列所接收的声发射信号;最后,构造式(4)的协方差矩阵,并对所构造的拉格朗日函数取微分,最终得到只考虑相位补偿的空间谱.求得柱面上目标声源的空间分布位置以及声场分布强度,进而实现对目标声源的识别与定位.
2 仿真与分析
2.1 仿真流程
对管道缺陷目标声源定位时,采用MVDR近场聚焦波束形成方法进行模拟仿真.模拟仿真主要分为以下4个阶段:(1)对声发射信号波形的获取,现有的方法是给一个激励获取声发射信号波形,本文是使用传感器阵列直接获取声发射信号;(2)将获取波形的峰值频率均值、幅值、平均频率均值、中心频率均值等参数进行分析处理;(3)由于MVDR近场聚焦波束形成算法中阵元间距、阵元数、声源半径以及声源信号频率等参数会对声源分辨效果产生影响,因此进行大量的仿真实验,以确定最佳仿真参数;(4)确定目标声源位置,得到声场分布图、三维空间图.
2.2 声源仿真
管道缺陷声源的声发射信号所处的频段范围较宽,考虑到低频段易受噪声影响,一般选取高频的超声信号.本文选取的管道材质为钢管材料,管道壁厚根据燃气管道壁厚进行选择,壁厚约为5mm,选取超声信号进行仿真,以此获得合理的实验参数,仿真中管道所处环境噪声较少.通过调整阵元间距、阵元数、声源信号频率以及声源半径,寻求最佳仿真效果时的仿真参数.实验中选取声源信号频率60~200kHz,声速5200m/s,管道长度(L)6m.
假设声源位置在(-2,60°)、频率f=60kHz、阵元数N=20、阵元间距d=0.32m、声源半径R0=1.5m的点,对声源进行仿真分析,取信噪比为20的高斯白噪声作为背景噪声.声场分布图、三维空间图如图2所示.由图2可知:声场分布较强的位置为 (-2,114°),轴向声源识别位置较为准确,但周向声源识别位置相差54°,相差较大,因此无法识别声源点位置.
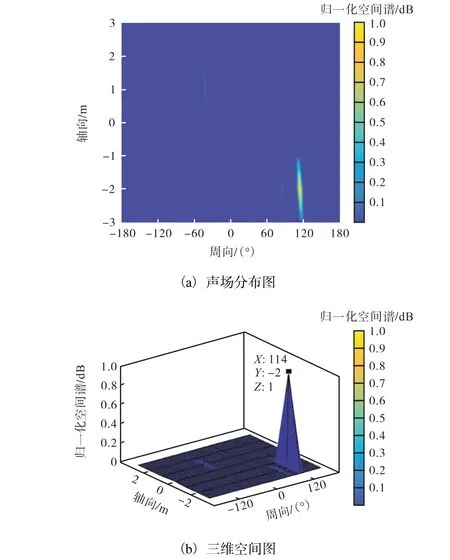
图2 f=60kHz、N=20、d=0.32m、R0=1.5m的声场分布图和三维空间图 Fig. 2 Sound field distribution diagram and threedimensional space diagram with f=60kHz,N=20,d=0.32m,R0=1.5m
放宽参数,选取频率f=150kHz,其他参数不变,其声场分布图、三维空间图如图3所示.由图3可知:声场分布较强的位置为(-2,54°),轴向声源识别位置为准确值,周向声源识别位置相差6°,对于此次仿真周长为9.42m的管道而言相差较小,可忽略不计,因此可以识别声源点位置;与图2相比,增大声源信号频率,周向声源识别的位置误差也随之减小,提高了整体的识别精度.

图3 f=150kHz、N=20、d=0.32m、R0=1.5m的声场分布图和三维空间图 Fig. 3 Sound field distribution diagram and threedimensional space diagram with f=150kHz,N=20,d=0.32m,R0=1.5m
改变参数,选取频率f=150kHz、阵元数N=8、阵元间距d=0.86m,其他参数不变,其声场分布和三维空间图如图4所示.由图4可知:声场分布较强的位置为(-2,42°).轴向声源识别位置为准确值,周向声源识别位置相差18°;与图3相对比,减少了阵元数,周向声源识别的位置误差也随之增大,降低了识别精度.
改变参数,选取频率f=150kHz、阵元数N=8、阵元间距d=0.86m、声源半径R0=3m,其声场分布图、三维空间图如图5所示.由图5可知:声场分布较强的声源点位置为(-2,54°),轴向声源识别位置为准确值,周向声源识别位置相差6°;与图4相对比,增大声源半径,周向声源识别的位置误差也随之变小,提高了识别精度.
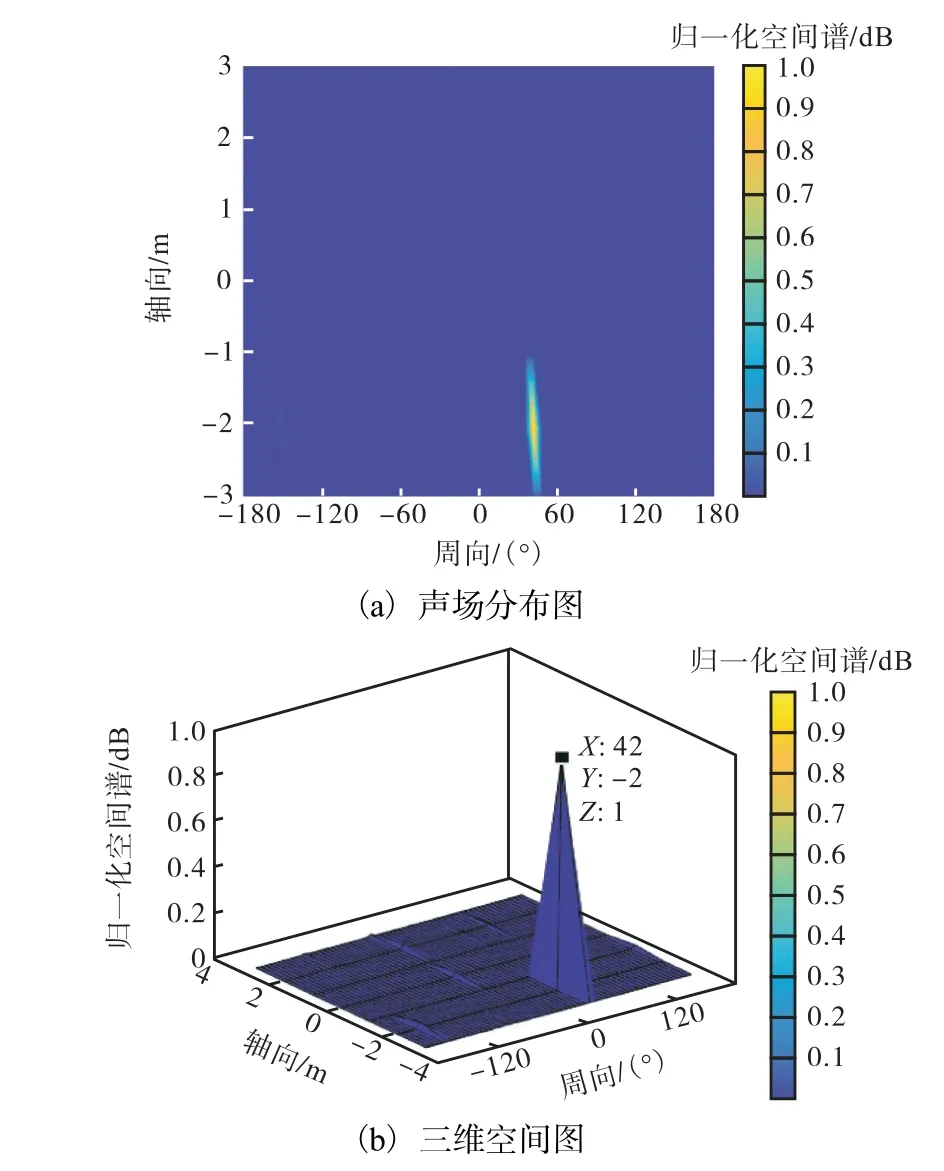
图4 f=150kHz、N=8、d=0.86m、R0=1.5m的声场分布图和三维空间图 Fig. 4 Sound field distribution diagram and threedimensional space diagram with f=150kHz,N=8,d=0.86m,R0=1.5m
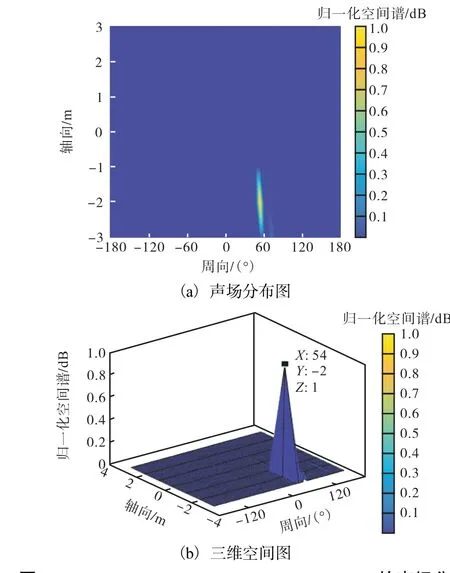
图5 f=150kHz、N=8、d=0.86m、R0=3m的声场分布图和三维空间图 Fig. 5 Sound field distribution diagram and threedimensional space diagram with f=150kHz,N=8,d=0.86m,R0=3m
3 定位误差分析
假设实际声源值坐标为M(z,θ),使用MVDR近场聚焦波束形成算法获取的坐标为M1(z1,θ1),定位误差为D,则定位误差分析如图6所示.
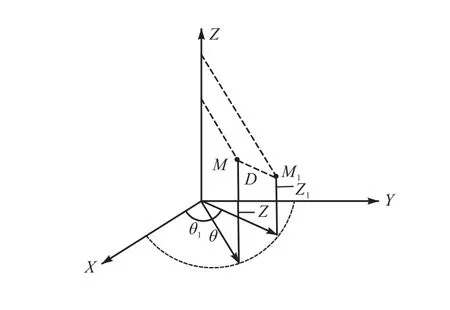
图6 误差分析图 Fig. 6 Error analysis chart
整体的声源定位误差为

轴向和周向的定位误差[5]为
参数取值一致的情况下,在频率范围60~200kHz内采用MVDR近场聚焦波束形成方法进行仿真实验,不同频率下的定位误差如图7所示.
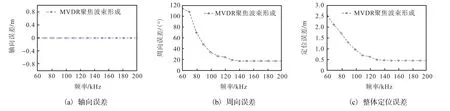
图7 不同频率下的定位误差 Fig. 7 Positioning errors at different frequencies
参数取值一致的情况下,在阵元数5~20范围内采用MVDR近场聚焦波束形成方法进行仿真实验,不同阵元数下的定位误差如图8所示.
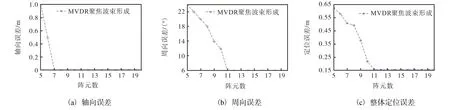
图8 不同阵元数下的定位误差 Fig. 8 Positioning errors under different numbers of array elements
参数取值一致的情况下,在声源半径范围1.5~4m内采用MVDR近场聚焦波束形成方法进行仿真实验,不同声源半径下的定位误差如图9所示.

图9 不同声源半径下的定位误差 Fig. 9 Positioning errors under different sound source radiuses
参数取值一致的情况下,在阵元间距范围0.32~1m内采用MVDR近场聚焦波束形成方法进行仿真实验,不同阵元间距下的定位误差如图10所示.
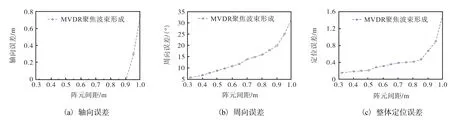
图10 不同阵元间距下的定位误差 Fig. 10 Positioning errors under different array element spacing
基于上述仿真情况,在声源信号频率60~200kHz、阵元数5~20、声源半径1.5~4m、阵元间距0.32~1m范围内进行大量仿真实验,部分仿真结果统计见表1.
由表1以及定位误差图可知:随着声源信号频率、声源半径的增加、阵元间距的减少和阵元数的增加,整体定位误差会越来越小,声源识别效果也会越来越好.当选取阵元间距较小时,虽然分辨效果越来越好,但也使得实际工程操作难度大大增加.因此,在实际测量过程中,在对声源分辨结果没有造成影响的情况下,应最大程度地降低测量精度,综合考虑声源信号频率、声源半径、阵元数、阵元间距的取值范围和实际可操作性以及经济实用性.
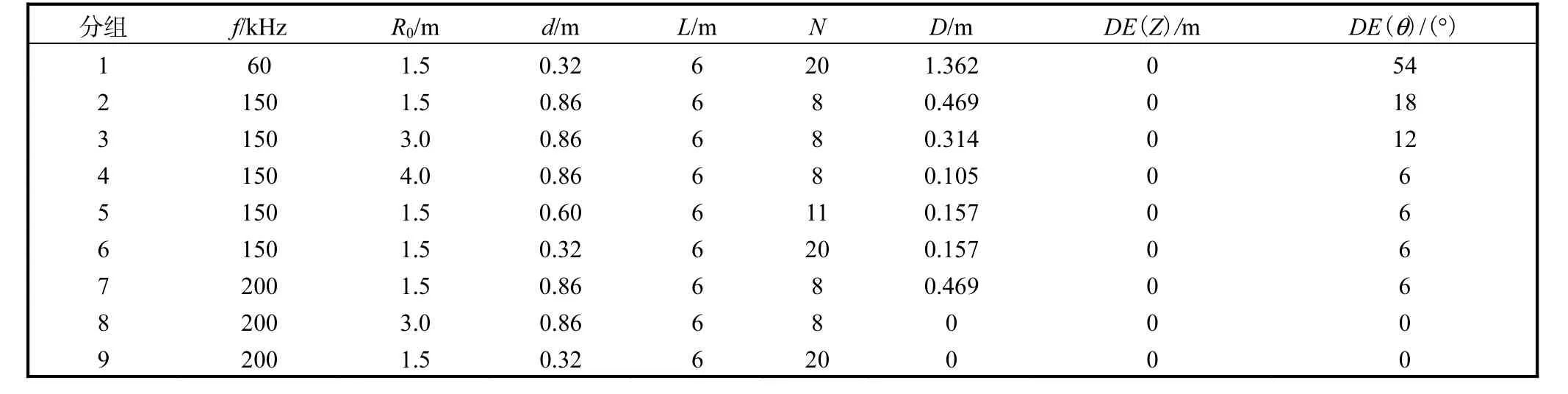
表1 仿真结果 Tab. 1 Simulation results
4 构建声发射定位实验系统
声发射采集定位实验实际连接图见图11.
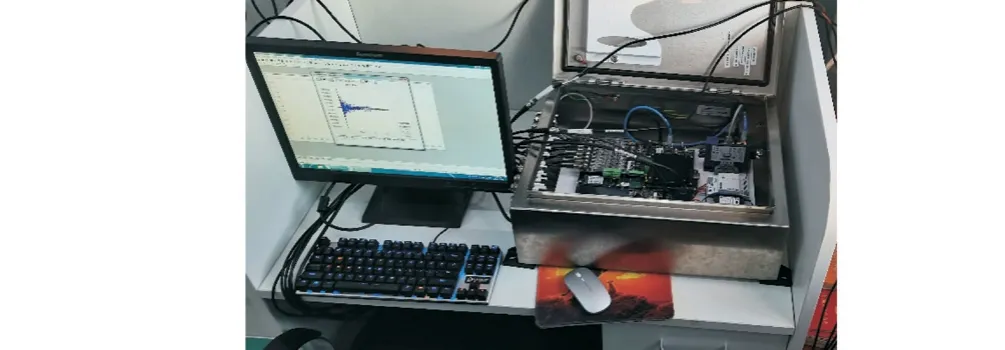
图11 声发射采集定位实验实际连接图 Fig. 11 Actual connection diagram of acoustic emission acquisition and positioning experiment
将声发射传感器阵列按一定布局布置到管道上,声发射信号通过信号处理模块传输到总线控制器,通过PCLE总线传递到CPU主板上,将信号传输到上位机进行定位分析和显示,获取管道缺陷位置.
考虑到实验条件,选取长为1500mm、直径为35mm的竖状暖气管道,按8个测量点进行实验.上位机AEwin软件获取的定位结果如图12所示.图12中红色点位置(0.4916mm,898.8mm,13.61mm)为声源点位置.
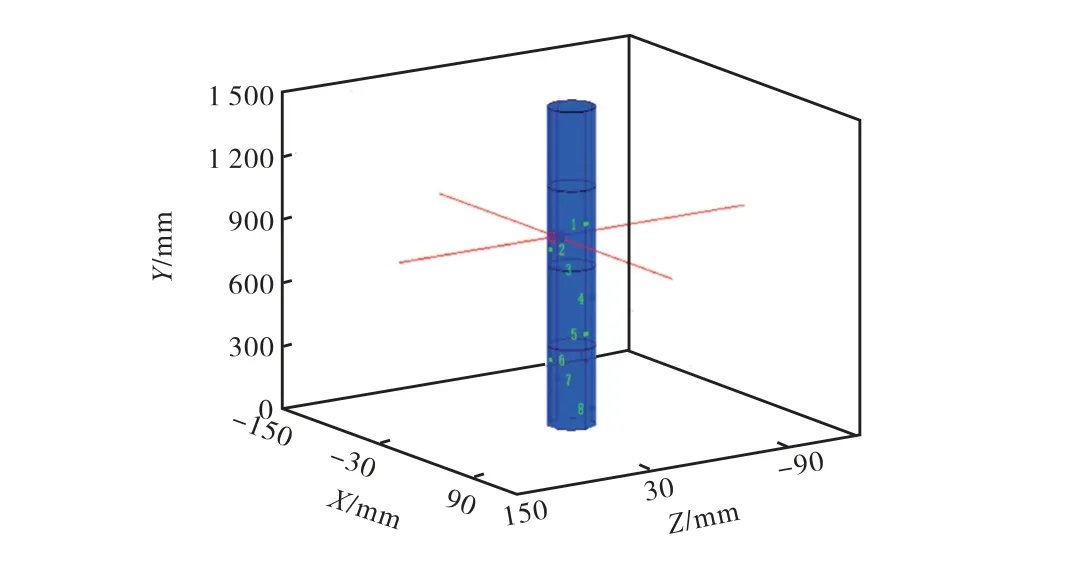
图12 AEwin声源定位图 Fig. 12 Location map of AEwin sound source
将参数导入MVDR近场聚焦波速形成声源定位软件得到的声源定位结果如图13所示.由图13可知定位出声源位置在(900mm,90°)位置,通过坐标转换,得到声源点位置约在(0mm,900mm,17.5mm).与图12声源定位结果相对比,误差不大,因此可以说明两者定位效果相符,表明声源定位方法可行.
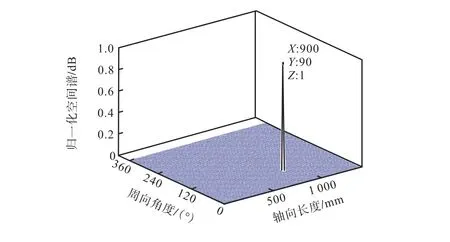
图13 MVDR声源定位图 Fig. 13 Location map of MVDR sound source
5 结语
运用MVDR近场聚焦波束形成方法,研究柱面管道缺陷声发射信号源识别仿真及影响声源分辨效果的测量参数,寻求最佳的声源识别仿真效果.结果表明:频率处于100kHz以上时,误差逐渐趋于平缓,误差值在0.5附近;阵元数处于10以上时,误差值较小,为0.157;阵元间距超过0.85m时,误差上升趋势较大;声源半径在1.5~4m范围内,误差呈下降趋势.当声源信号频率越高、阵元间距越小、阵元数越多以及声源半径越大时,声场分布强度就越高,定位误差就越小,声源识别效果也越好。因此,可将MVDR近场聚焦波束形成技术推广应用于大型油气管道或者大型储罐缺陷声源的检测,从而实现对管道 或储罐缺陷位置的声源识别与定位,以达到提前预防泄漏的效果.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
教育教学论坛(2020年39期)2020-10-09
现代计算机(2019年11期)2019-05-27
中国舰船研究(2019年2期)2019-04-20
家庭影院技术(2018年11期)2019-01-21
数学学习与研究(2018年15期)2018-11-12
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年10期)2018-11-02
现代电子技术(2018年7期)2018-04-04
制导与引信(2016年3期)2016-03-20