推力矢量试验设备分段精确控制方法研究
2021-12-22 13:18:34唐小力
计算机测量与控制 2021年12期
杜 宁,涂 清,易 凡,向 兵,唐小力
(中国空气动力研究与发展中心高速所,四川 绵阳 621000)
0 引言
推力矢量[1-6]是实现战斗机过失速机动和直接力控制模式超机动能力的一项气动/动力装置一体化技术,在现代战斗机突破失速障、增强机敏性、改善起降性能、巡航性能及隐形特性等方面具有重要作用,是现代高性能战斗机的必备技术[7--15],是第四代战斗机的重要标志之一。其中,推力矢量试验设备的控制系统研制是该项目建设中极其重要的一个子项。控制系统的作用除了能够为试验提供可靠稳定的高压气源,更重要的是还可以对多路高压、大流量气流进行精确的流量控制、对气流流量进行实时监测,以满足试验的需要。
结合推力矢量试验设备的特性,将整个控制过程分为启动充压、压力调节和流量调节3个阶段,并分阶段开展了专家系统、智能PID以及补偿解耦等控制策略研究,最终达到了设备的技术指标要求。
1 推力矢量试验系统结构及原理
推力矢量流量控制系统主要用于气体流量的实时控制和监测。整个控制系统分为两个部分,高压管路供气系统和流量控制系统。高压管路供气系统主要由闸阀、气动球阀以及多级减压阀组成,其作用是为推力矢量试验装置提供安全稳定可靠的气源。流量控制系统主要由调压阀、高精度数字阀以及流量计组成,其作用是对高压气流进行精确控制和实时监测,以满足试验的需求。
为保证系统运行的可靠性与稳定性,控制系统采用上、下位机结构形式。上位机选用工控机作为流量控制系统的操作员站和工程师站,实现流量控制系统的参数设定和系统操作/维护功能。下位机选用GE PACSystems RX3i PLC控制器为主站,VersaMax系列的远程I/O为从站。下位机主要实现流量的调节和测量以及对高压管路设备的安全监控。下位机从上位机接收试验参数,由PLC系统独立运行相应的控制算法,实现对流量的精确控制,同时承担驱动气体流量控制系统的安全联锁工作,当试验系统出现异常时,控制系统会自动采取有效措施,保证人员和设备安全。上位机软件选用Labview软件平台,下位机选用Cimplicity Machine Edition软件平台,上下位机通过以太网进行数据交互。推力矢量控制系如图1所示。

图1 推力矢量试验装置原理图
推力矢量控制系统研制的技术指标主要包括:
1)工作压力范围:9~15 Pa;
2)流量范围:0~3 g/s;
3)流量调节控制精度:3‰~5‰。
2 多模型控制策略
2.1 控制难点分析
推力矢量试验装置对流量控制精度要求高、调节时间要求短,而推力矢量流量系统本身具有的调整范围大、滞后、非线性、耦合强等特性,给流量的精确控制带来很大的难度,具体表现在:
1)系统调整范围大。每次试验,流量的变化均需要经历0至设定值的变化过程,流量在经历如此大的变化过程中,系统的非线性、不确定性等因素极大地增加了控制难度;
2)系统存在大滞后和强耦合。受系统结构限制,压力调节系统本身存在大滞后;且多路供气管路之间存在相互干扰,导致系统中各个主要变量间存在相互耦合。
3)流量调节精度要求高。试验对流量调节精度提出了很高的要求,其控制系统流量控制精度要求达到3‰~5‰,这一要求远远高于工业控制的精度要求。
4)流量调节速度要求快。为了节省气源,降低试验成本,要求流量尽可能快的调整至设定值,并保持到试验结束。
2.2 多模型控制策略设计
针对推力矢量试验中对控制系统的流量精度要求以及推力矢量系统的特点,对控制器提出如下要求:
1)在试验初期,需要快速的将流量调整至设定值附近,以节省气源,降低试验成本。
2)在试验进行过程中,采用高精度控制器,以保证流量控制精度达到3‰~5‰。
由此可见,对于试验的不同阶段,对控制器、控制性能的要求不同,采用单一的控制方法无法同时满足试验各个阶段的控制需求。因此必须针对不同试验阶段的要求,设计相应的控制算法。为此,多模型控制策略可以满足这一要求。
多模型控制采用多种控制方法,并引入一个监控机制。当被控对象的控制域发生较大的变化时,监督机构能够快速识别此变化并做出决策以选择适用于当前系统工作条件的控制方法。基于此,将整个试验过程分为启动充压、压力调节和流量调节3个阶段,并提出如下的多模型控制策略:
启动充压阶段主要是为实现快速建立流场、降低能耗的目的。由此该阶段采用基于专家知识的开环控制策略,调整调压阀后压力,待压力达到设定压力的0.9倍后转入闭环控制。
压力调节阶段主要是实现对调压阀后压力的精确调节。考虑到气源压力的下降、波动及管路之间的相互耦合等因素对压力闭环调节的扰动及影响,根据调压阀后压力偏差及其变化特点,将变积分系数和增量式控制算法相结合,设计自适应PID控制器,以满足对工作点压力的精确控制。当调压阀后压力控制精度达到1%时,转换至流量调节阶段。
流量调节阶段主要是实现流量的精确调节。由于调压阀对阀后压力调节与数字阀对流量调节之间存在一定的耦合关系,在流量精确调节过程中,采用补偿解耦控制策略,最终实现流量的精确控制。当流量控制精度达到3‰~5‰的指标要求后,记录试验数据。
为保证控制策略的实现,我们对试验流程也进行了设计,如图2所示。

图2 推力矢量试验流程
3 基于专家系统的启动充压阶段控制
专家系统是一个智能计算机程序系统,其内部含有大量某个领域专家水平的知识与经验,能够利用人类专家的知识和解决问题的方法来处理该领域的问题[16-17]。
在试验现场,经过多年的现场试验,相关操作人员采集了大量试验数据,可以充分的显示出设备的特性信息;此外气动专家结合专业理论知识和长时间的实践探索,获得了丰富的理论与实践经验。这些专家知识对启动冲压阶段流场快速建立的过程具有十分重要的指导意义。因此,根据专家知识创建出对应的启动充压阶段控制知识库,并结合知识库中的相关知识设计出相应的控制规则库,以实现流场的快速建立。
3.1 定义特征参数表
以两路流量调节为例,依据控制流程,结合气动专业人员提供的参数,定义出启动充压阶段控制系统的特征参数,以及典型取值,如表1、表2所示。

表1 控制系统特征参数

表2 充压过程典型取值
3.2 创建知识库与规则库
结合地面调试时采集的试验数据所反映出的现象信息和“气动专家知识及经验”,创建出知识库,并根据知识库设计出了如下的流量控制专家规则:
Rule1:ifTS1thenu1=0,u2=0,u3=S10,u4=S20;
Rule3:ifTS2∩[(P01≥P1)∪(P02≥P2)] thenu1=l10,u2=l20,u3=S10,u4=S20;
Rule4:ifTS2∩[(P01≥P1)∪(P02≥P2)]∩TS5thenTS3,TS4。
其中:P01、P02为1#、2#调压阀后压力;S10、S20为1#、2#数字阀开度设定。该规则的优点是使调压阀后压力快速到达设定的切换点,进入压力闭环控制,避免压力出现震荡。
4 压力调节阶段的智能PID控制
在压力调节阶段,考虑到气源压力的下降、波动及管路之间的相互耦合等因素对压力闭环调节的扰动及影响,根据调压阀后压力偏差的变化特点,结合现场测量数据和操作人员的控制经验,设计出将变积分系数和增量式控制算法相结合的智能PID控制器[18],以克服常规PID控制器受被控对象非线性特性影响大、对扰动适应能力弱的缺点,实现调压阀后工作点压力的精确控制。
变积分控制器的输出为:
u(k)=u(k-1)+K1{kp[e(k)-e(k-1)]+kie(k)+
kd[e(k)-2e(k-1)+e(k-2)]}
(1)
其中:u为控制器输出;kp为比例系数;ki为积分系数;kd为微分系数;K为控制器参数。
当|e(k)|≤1 kPa、调压阀进入闭环控制压力阶段时,智能PID控制器分以下4种情况设计。
1)当e(k)Δe(k)>0且e(k)Δe(k-1)<0时,误差向误差绝对值增大方向变化,此时控制器输出为:
u(k)=u(k-1)+kp[e(k)-e(k-1)]+kie(k)+
kd[e(k)-2e(k-1)+e(k-2)]}
(2)
2)当e(k)Δe(k)<0且e(k)Δe(k-1)>0或e(k)=0时,误差的绝对值向减小的方向变化或者已经达到平衡状态。此时,保持控制器输出不变。
3)当e(k)Δe(k)>0且e(k)Δe(k-1)<0时,误差处于极值状态。如果此时误差绝对值较大,即|e(k)|≥1 kPa,则实施如下较强的控制量:
u(k)=u(k-1)+k1kpe(k)
(3)
如果此时误差绝对值较小,即|e(k)|<1 kPa,则可以考虑实施较弱的控制量:
u(k)=u(k-1)+K2kpe(k)
(4)
以上式中K1>K2。
4)当|e(k)|<0.05 kPa时,说明误差绝对值很小,此时加入积分环节,减小稳态误差,直到调压阀后压力达到精度要求。
5 流量调节阶段的精确控制
流量调节阶段是整个流量控制的关键阶段,调压阀对阀后压力调节与数字阀对流量调节之间存在一定耦合关系。同时,为快速、高精度控制流量,设计了两个并联的控制器,分别为暂态控制器和稳态控制器。暂态控制器适用于流量变化的过程,采用改变调压阀开度开环补偿调压阀后压力,同时调整数字阀的开度。当触及到危险流量范围时,快速改变流量以通过危险流量区域,确保设备安全。待流量达到设定值附近时,转入稳态控制器。稳态控制器具有极好的设定值跟踪能力,适用于流量小阶差调节和稳态过程,既保证了在设定值附近具有良好的调节效果,又具有很好的抑制干扰能力。
为有效消除调压阀后工作点压力与流量之间的耦合关系,采用补偿解耦控制策略[19-20]来实现流量的精确控制。控制器结构如图3所示。

图3 补偿解耦控制策略框图
定义emi=Flowi-Flowoi(i=1,2),其中emi表示流量偏差;Flowoi为设定流量;Flowi为输出流量。
控制器的特征模型为:
Φ=P⊗Q
(5)
控制模态集:
u=C·M
(6)
M=[m1m2m3m4m5m6m7m8m9m10]T。
式中,m1→Kp·emi;m2→Si0;m3→K1KP·emi;m4→K2KP·emi;m5→K3Kp·emi;m6→K4Kp·emi;m7→K5KI·∑emi;m8→K1·f(emi);m9→Δmi·K;m10→βmi。其中,Δmi为流量的变化量,f(emi)为积分项变速因子,其表达式为:
(7)
M1~M4为设定的误差带;K1~K5为增益系数;Kp、KI为比例、积分系数;K为解耦系数;βml为解耦修正值。
6 实验结果与分析
系统设计完成后,依次对硬件、软件等功能进行了测试,然后进行了系统联合调试。联合调试主要分为模拟调试和带动力调试。模拟调试是通过模拟压力、流量反馈对控制系统的功能进行验证和测试。带动力调试是连通高压气源,通过安装在管路上的传感器和流量计作为信号源,采用多模型控制策略对管路阀门进行精确调节,以验证实际效果。
经过前期周密的准备,项目组顺利完成了推力矢量控制系统的调试工作。图4分别给出了1#和2#管路在不同流量给定条件下的控制曲线图。

图4 流量控制曲线
从图4(a)中可以看出,在小流量试验时,通过基于专家经验的智能控制,保证了系统快速冲压;在压力、流量调节阶段,通过补偿解耦控制策略,流量能快速接近设定值并迅速收敛达到稳定状态。从图4(b)中可以看出,在大流量时,系统同样具有较强的控制、调整能力,表明控制器设计具有较强的适应性。
为进一步说明本文所提方法的有效性,对各个不同目标流量的工况进行试验,统计各个实验的控制精度,并与之前采用传统PID控制算法得到的结果进行对比。该精度由如下公式计算得到:

(8)
图5为采用本文所提算法在不同试验工况下得到的流量控制精度,图6为采用传统PID控制算法在不同试验工况下得到的流量控制精度。从图6中可以看出,采用传统PID控制算法得到的控制精度不能满足试验要求,最小值仅为5‰,并随着流量设定值的增大而逐渐增大;而从图5中可以看出,系统流量控制精度最大值为3.5‰(2#管路350g/s时),最小值小于1‰,控制精度大幅度优于采用传统PID控制算法的到的结果,完全满足进行推力矢量试验所设计的3‰~5‰的指标要求。这是由于采用分段控制的方法,针对不同阶段的特性,有针对性的设计出相应的控制器,能够很好的实现流量的精确控制。
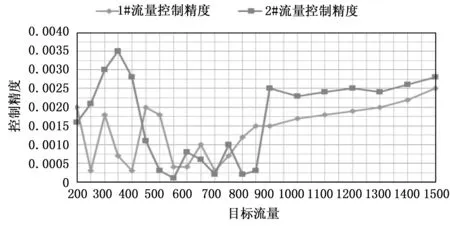
图5 基于本文算法的流量控制精度
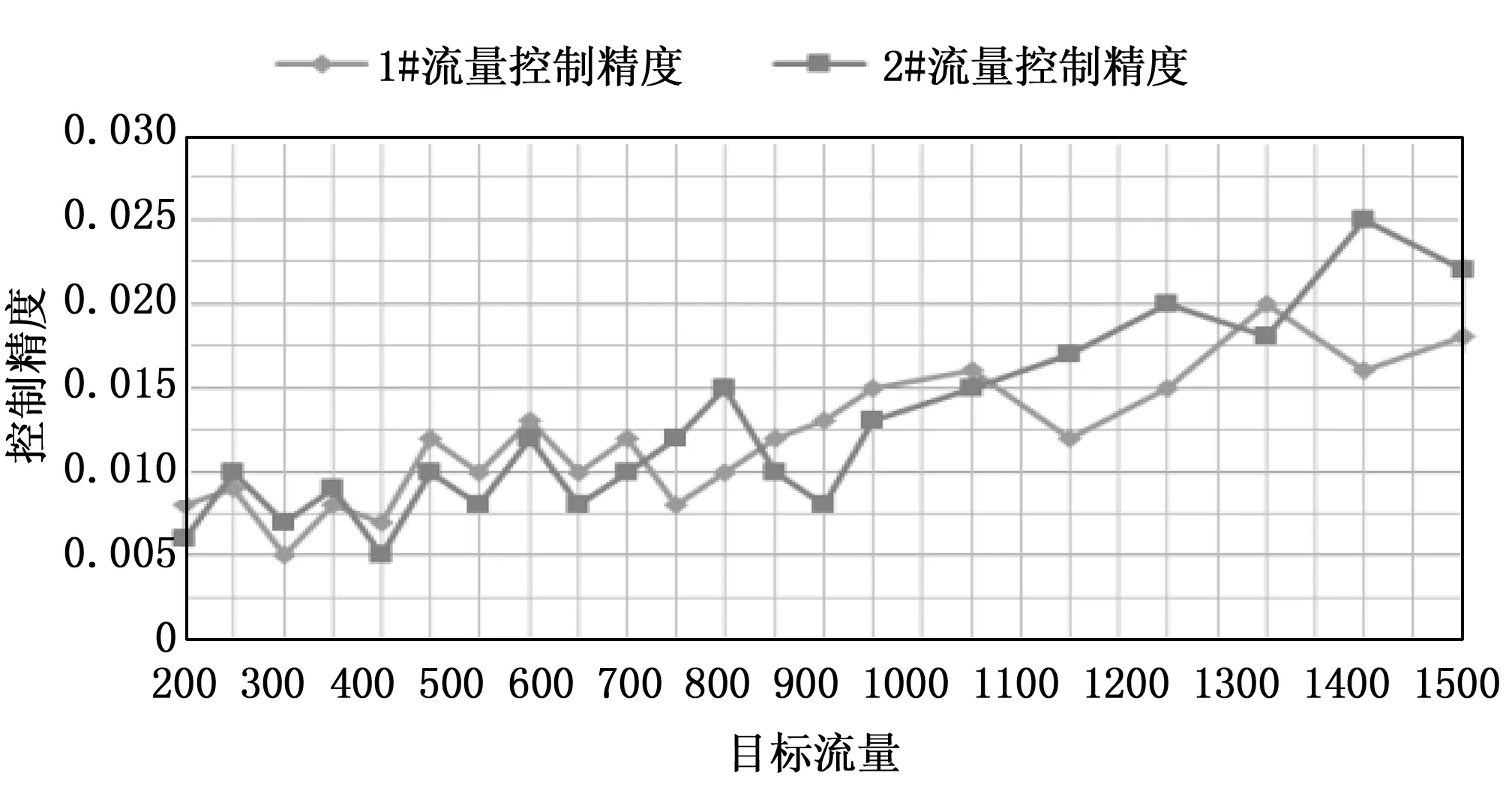
图6 基于PID控制算法的流量控制精度
7 结束语
通过本研究,可以得到以下结论:
1)研制的流量控制系统,流量控制精度达到3‰~5‰,完全满足推力矢量试验的对流量精准度的需求。
2)设计的多模型精确控制策略,能很好地克服了系统本身的特性,实现气流在高压、大流量条件下的高精度控制。
3)基于补偿解耦控制策略,系统具有较强的控制、调整能力,流量能快速接近设定值并迅速收敛达到稳定状态。
猜你喜欢
宇航计测技术(2018年3期)2018-09-08 02:21:36
制造技术与机床(2017年6期)2018-01-19 02:41:07
物联网技术(2017年7期)2017-07-20 14:09:05
专用汽车(2016年4期)2016-03-01 04:14:27
电源技术(2015年9期)2015-06-05 09:36:06
纺织导报(2014年9期)2014-10-31 00:07:58
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
中国高新技术企业(2014年1期)2014-01-14 08:31:50
上海金属(2013年4期)2013-12-20 07:57:17
河南水利与南水北调(2013年4期)2013-12-08 07:23:58