基于激光干涉仪对天文底片扫描仪气浮式运动平台的性能测试
2021-12-22 13:18:28王亮亮商正君郑立新杨美婷赵建海
计算机测量与控制 2021年12期
王亮亮 ,商正君, 郑立新,杨美婷, 杨 静, 赵建海, 于 涌,2
(1.中国科学院 上海天文台,上海 200030; 2.中国科学院大学,北京 100049)
0 引言
天文学的发展很大程度上取决于原始观测资料的数量和质量。在电荷耦合器件发明之前,天文玻璃底片是天文望远镜的主要观测接收器件。根据统计,1850-2000年间全世界天文望远镜总计拍摄了近300万张天文玻璃底片,它们记录了不同时期天体的动态信息,是当时所在天区的唯一观测记录。然而,底片发霉甚至药膜脱落正在不断增加着科学信息损失的风险。国际天文联合会(IAU)分别于2000年和2018年发布决议,呼吁全球天文界加强合作,尽早开展天文底片数字化,将珍贵科学信息抢救出来[1-2]。
为响应IAU号召,推进国际天文底片数字化工作,2020年起,上海天文台开展高精度天文底片专用扫描仪的自主研制。天文底片专用扫描仪主要由两轴线性运动平台、科学级探测器、远心镜头和光源等部件构成。其中,两轴线性运动平台的作用是承载天文底片,使其在工作平面内产生高精度的步进式二维运动。在此过程中,科学级探测器进行信号采集,完成整幅天文底片的面扫描,最后通过图像拼接形成数字化图像。根据天文底片实际情况和测量精度的需求,要求天文底片专用扫描仪的位置扫描精度优于1 μm,这直接取决于两轴线性运动平台的性能。
近年来,气浮式运动平台技术发展迅速,该技术基于气体动静压效应,使得载物台在导轨上实现无摩擦和无振动的平滑移动,有利于高精度和快速度的运动导向和定位[3]。哈佛大学天文台和比利时王家天文台均采用气浮式运动平台研制了高精度天文底片专用扫描仪。为了适应未来大批量天文底片高精度的数字化需求,上海天文台研制的天文底片扫描仪同样采用气浮式运动平台,平台委托无锡星微科技有限公司生产制造。受到搬运条件限制,气浮式运动平台在佘山天文底片实验室现场完成组装。平台性能除了与制造工艺有关,还与实验室工作环境(温度、湿度、震动等)密切相关。作为高精度天文底片扫描仪研制过程中的重要环节,有必要在平台组装完毕后对其性能开展实地测试与评估。第1节介绍气浮式运动平台和激光干涉仪,第2节为针对各参数的测试方法和过程,第3节为实验结果与分析,最后为结束语。
1 气浮式运动平台和激光干涉仪
运动平台采用“H”型结构,如图1所示,主要由花岗岩基底、安装在花岗岩上的Y平台、安装在Y平台上的X平台,以及安装在X平台上的载物台组成。其中,Y平台包括驱动和支撑X平台运动的直线电机和直线导轨,X平台包括驱动和支撑载物台运动的直线电机和直线导轨,使得载物台具备X和Y两个方向的运动功能,行程为350 mm×350 mm。由于应用气浮导轨技术,载物台可沿导轨做无摩擦和无振动的平滑移动,有利于实现精确的点对点定位以及连续扫描式运动。
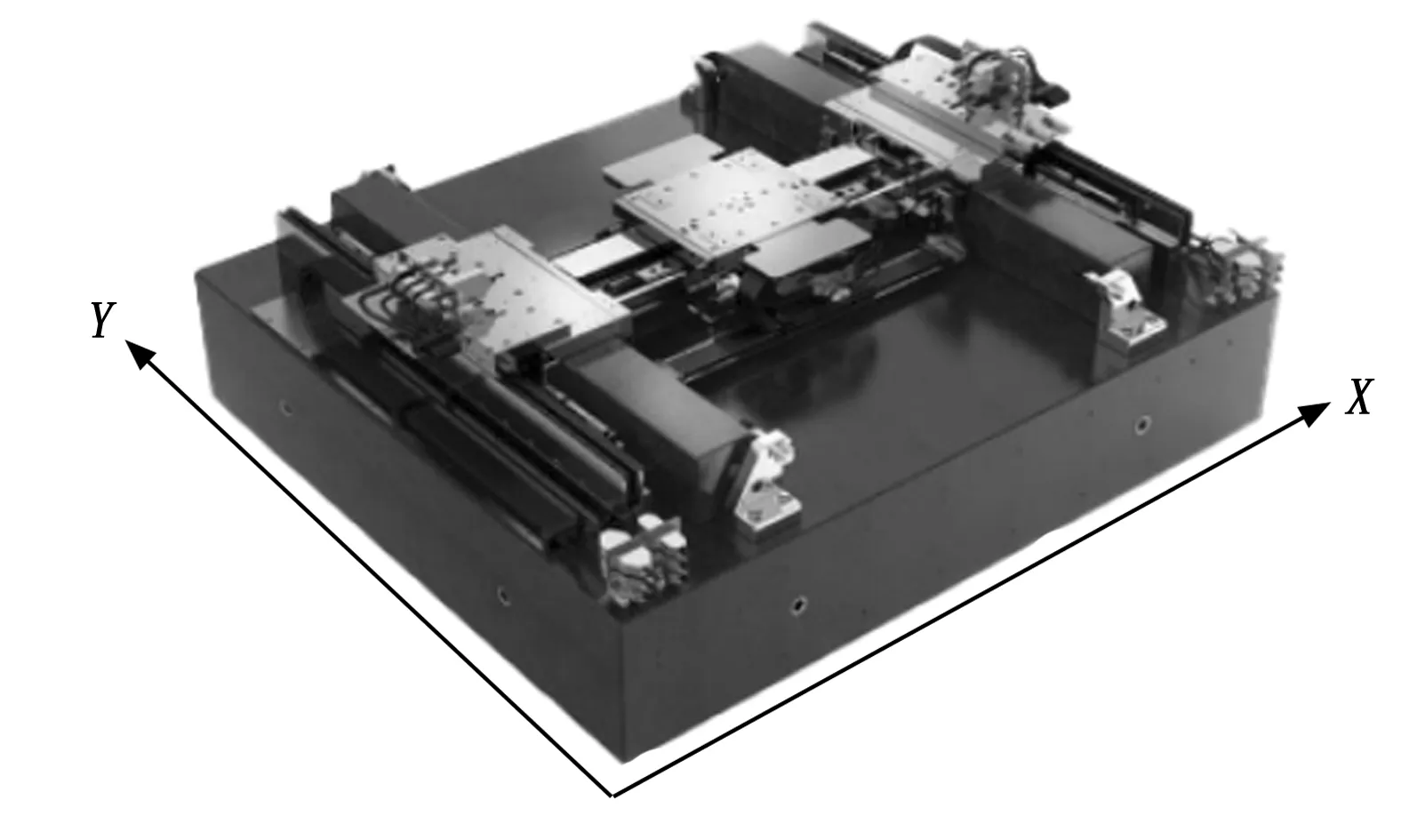
图1 气浮式运动平台结构
激光干涉仪基于光学干涉测量技术原理,具有高精度、非接触和实时性高等优点,广泛应用于线性运动位移平台精度的测量[4-5]。RENISHAW公司XL80激光干涉仪基于单频干涉技术原理,主要由激光头、光学镜组、环境补偿组件和LaserXL校准软件构成,其激光稳频精度优于±0.05 ppm(0~40 ℃),在1 m量程范围内,定位测量的绝对误差峰值小于±0.5 μm、直线度和平面度测量的绝对误差峰值小于±0.5 μm、角度测量的绝对误差峰值小于±0.1″[6]。按照使用要求,在测量前需要开机预热10 min以上,以获得稳定波长的激光输出。
XL80激光干涉仪的测量结果对环境非常敏感[7-8]。天文底片扫描仪实验室配备了恒温恒湿控制系统,室内温度保持20 ℃±0.5 ℃,湿度保持50%±5%。气浮式运动平台整体放置在与佘山岩石固连的独立基墩上,可以避免外界震动的影响。此外,对气浮式运动平台和激光干涉仪所在区域安装了挡风棚,减少空气流动对气浮式运动平台和测量光路的干扰。为了检验在当前环境下XL80激光干涉仪本身的测量稳定性,在气浮式运动平台350 mm行程范围内,等间隔选取5个位置。分别布置相应的激光干涉光路(见第2节),在每个固定位置重复采集定位、偏摆角和俯仰角等参数的测量数据。为了与实际测量时的耗时相当,每个参数的测量时长控制在3分钟左右,采集测量数据200次。表1列出各参数测量数据的均方差。可见,在当前实验室环境下,XL80激光干涉仪本身具有较高的测量稳定性,可以满足微米级气浮式运动平台的测量需求。

表1 XL80激光干涉仪测量结果的稳定性
2 测试方法及过程
天文底片记录了不同历史时期天体的位置和活动信息,是当时所在天区不可再现的唯一观测记录,因此在天文底片数字化工作中,使用高精度扫描仪的基本原则是完整保留天文底片的原始科学信息,不引入额外的位置误差。根据天文底片实际情况和测量精度的需求,要求天文底片扫描仪的位置扫描精度优于1 μm,这直接取决于两轴线性运动平台的性能。受到制造工艺和安装的限制,气浮式运动平台的载物台在运动过程中会产生多个自由度误差,包括线性位移定位、水平直线度和垂直直线度等误差(如图2左图),俯仰、偏摆和滚动等姿态角误差(如图2右图),以及X和Y两轴之间的不垂直度误差[9-10]。针对自由度误差的不同表现形式,使用RENISHAW XL80激光干涉仪,参考ISO230测量标准并结合实际测量条件,对定位重复精度、水平直线度、垂直直线度、俯仰姿态角误差和偏摆姿态角误差,分别搭建激光干涉光路开展测试。
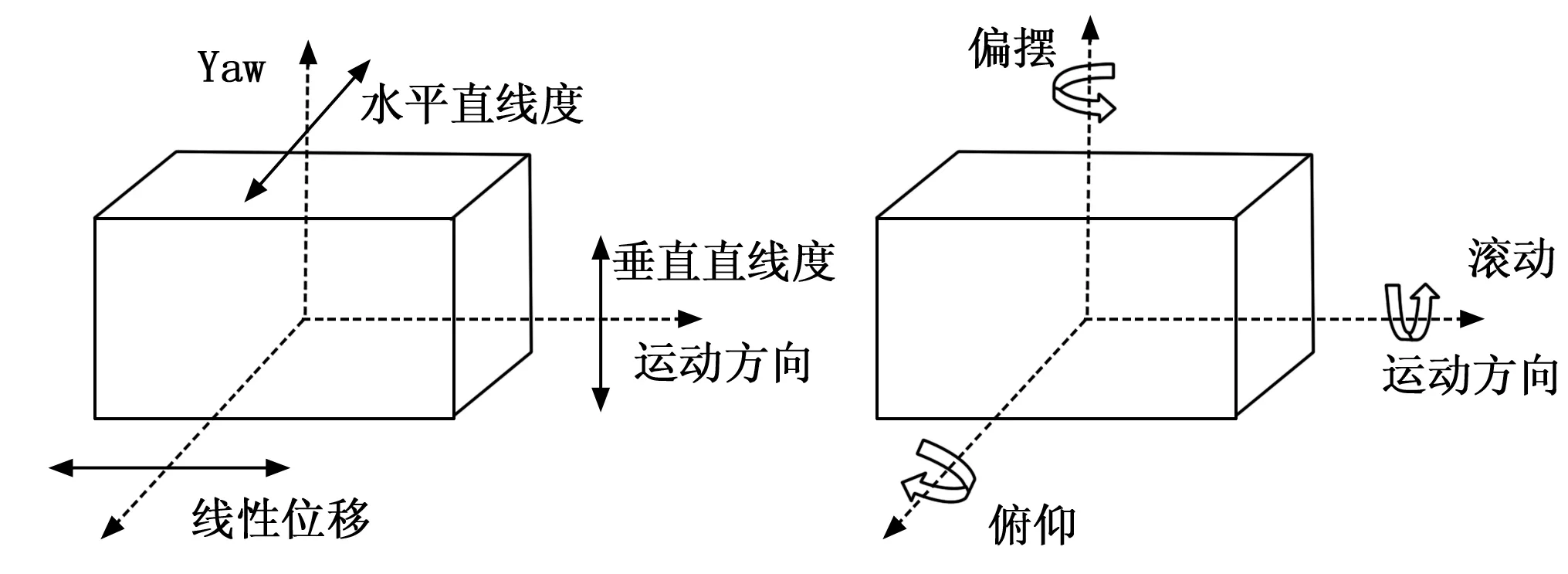
图2 平台运动自由度误差示意图
2.1 定位重复精度
定位重复精度测试的光路设计如图3所示,其测量原理为,干涉仪激光头出射的激光束经分光镜M1分为两束,一束光反射至固定角锥反射镜M2,经过反射再次经过分光镜后反射至探测器形成参考光束。另一束经分光镜M1透射至载物台上的移动角锥反射镜M3,经反射返回至探测器中形成测量光束。当移动角锥反射镜M3沿测量轴由位置A移动至位置B时,参考光束与测量光束干涉形成的条纹将由于该光程差的引入而发生变化,条纹变化数目对应于移动角锥反射镜M3的位移量[11-12]。

图3 定位重复精度测量的光路示意图

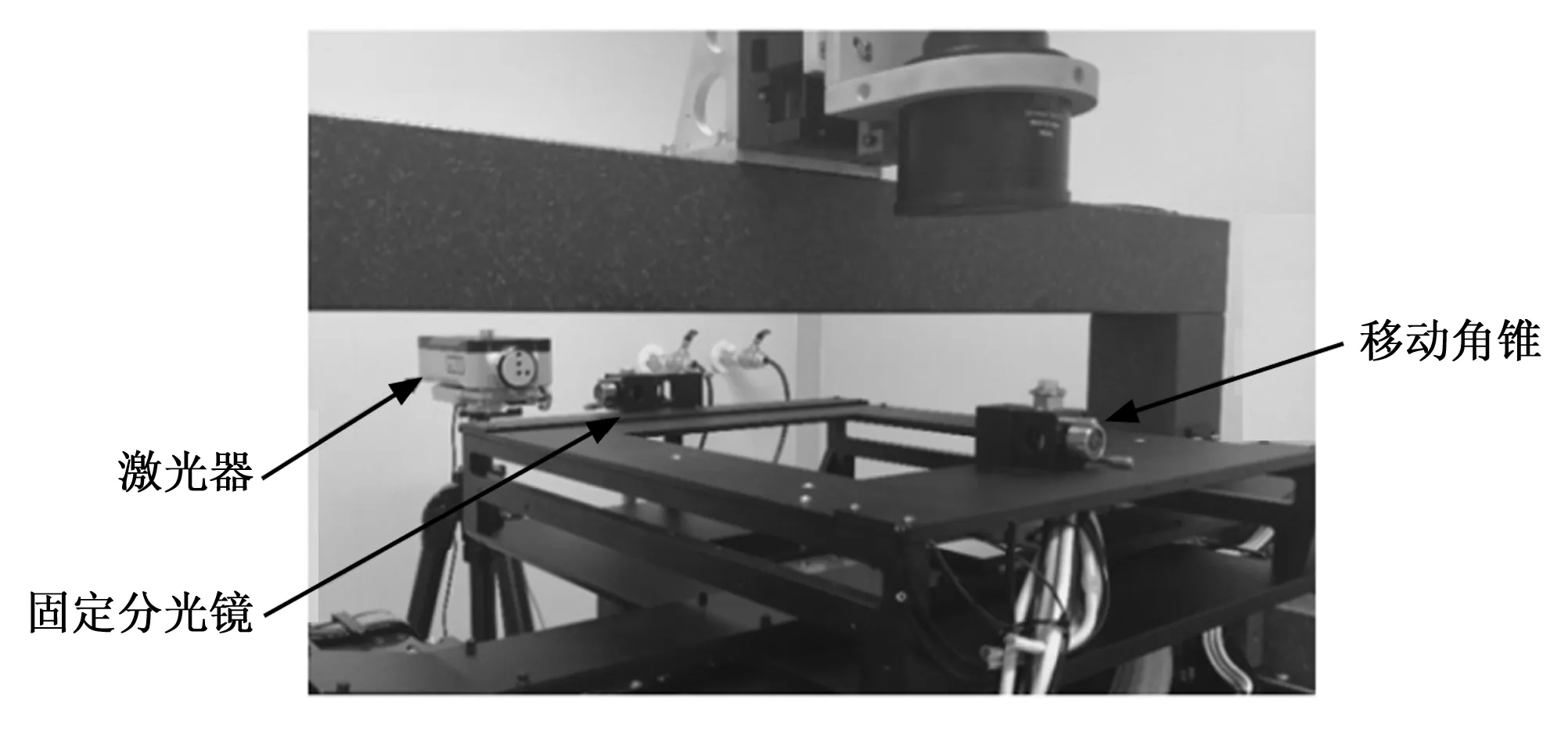
图4 定位重复精度测量的实物照片
2.2 直线度和平面度
直线度测试的光路设计如图5所示,其测量原理为,干涉仪激光头出射的激光束经分光棱镜M1被分为有一定夹角的两束光,分别沿着水平测量轴线的上方和下方出射,随后入射至长条直角双面反射镜M2,最后返回至分光棱镜M1发生干涉[13]。当分光棱镜M1沿水平测量轴由位置A移动到位置B时,由于载物台在运动平面内存在直线度偏差,使得分光棱镜M1在B处向上移动为Δh。此时,相对于A位置,在分光棱镜外部,测量轴线上方光路与下方光路的光程差没有发生变化,如图5(a)所示;而在分光棱镜内部,两束光路的光程差会发生变化[14],如图5(b),该光程差变化量体现在两光束的干涉条纹数目的变化。平面度测试与直线度类似,需要将双面反射镜M2旋转90°进行测量,以此反映载物台在垂直于运动平面上的起伏[15-16]。

图5 直线度测量的光路示意图
图6为测量直线度的实物照片,激光器和双面反射镜固定于运动平台外部,分光棱镜安置在可移动的载物台上。测量过程为:按照图5布置测量光路并准直;在整个行程范围内,以20 mm为步长,控制载物台沿测量轴从起点移动至终点,采集一系列行程Li和偏差Δhi;利用直线方程拟合Li和Δhi,根据拟合残差的均方差,得到该测量方向的直线度(或平面度)。

图6 直线度测量的实物照片
2.3 姿态角误差
负载姿态角(俯仰和偏摆)误差测试的光路设计如图7所示,其测量原理为,干涉仪激光头出射的光束经角度分光镜M1分为反射和透射光束,反射光束向上经再次反射后入射至角偶反射棱镜M2上方,返回分光镜;透射光束入射至角偶反射棱镜下方,也返回分光镜[17-19]。若位置B存在相对于位置A的俯仰角误差θ,则由角偶棱镜M2返回的两束激光的光程差会增加δL=θ*L,其中L为仪器常数。光程差变化量δL体现在两光束干涉后干涉条纹数目的变化。偏摆角误差的测试与俯仰角误差的测试方法类似,需将角度分光镜和角偶反射棱镜旋转90°进行测量,以此反映载物台在运动面内的偏摆[20]。
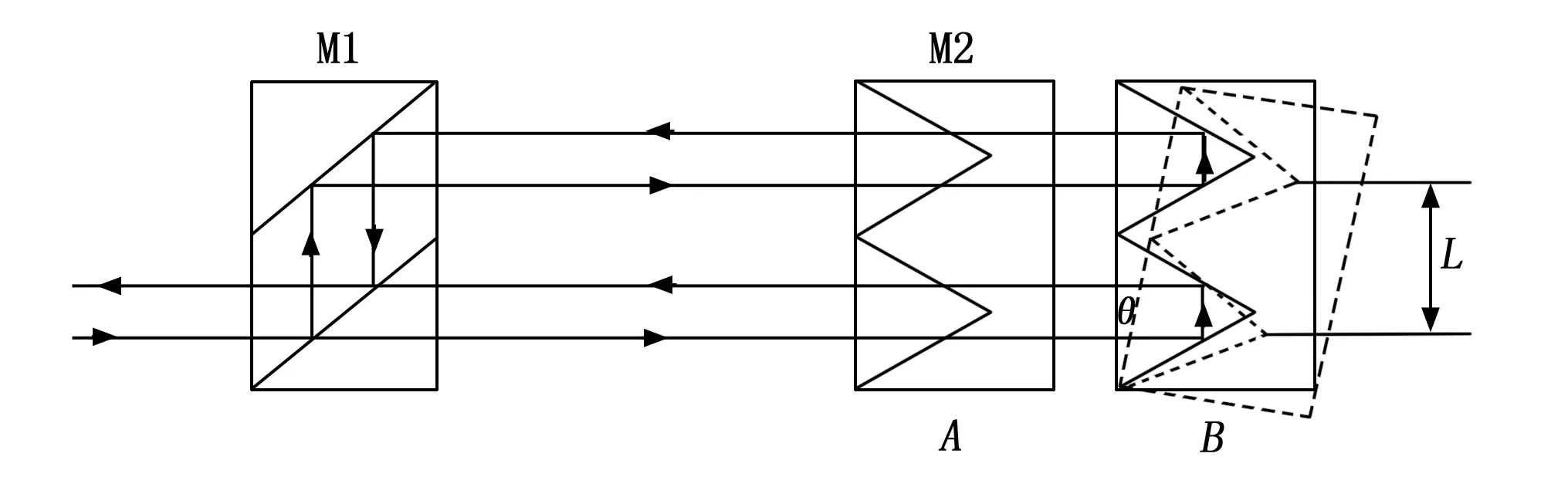
图7 角度测量的光路示意图
图8为俯仰角误差测试的实物照片,激光器和角度分光镜固定于运动平台外部,角偶反射棱镜安置在平台载物台上。测量过程为:按照图7布置测量光路并准直;在整个行程范围内,以20 mm为步长,控制载物台沿测量轴从起点移动至终点,采集一系列偏差;根据的均方差,得出该测量方向的俯仰角误差。
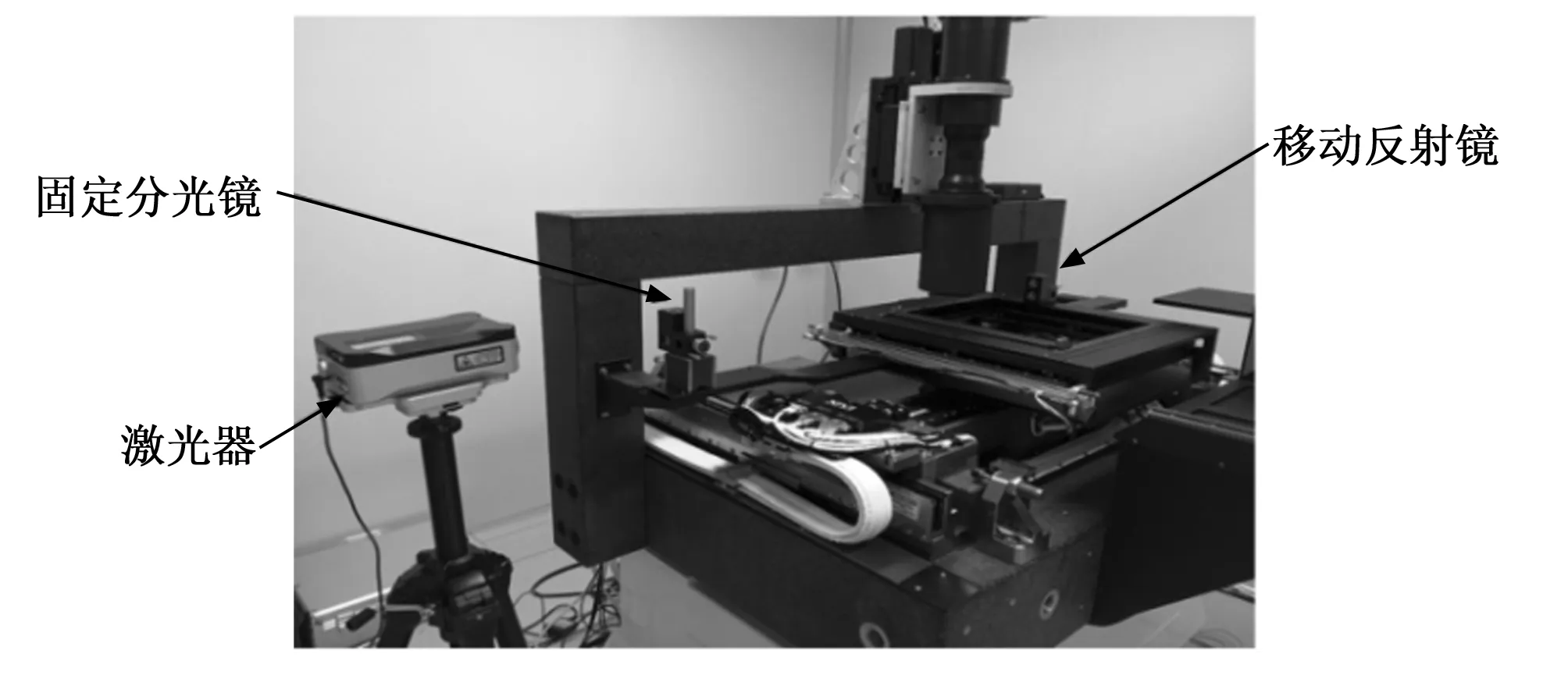
图8 角度测量实物照片
3 实验结果与分析
高精度天文底片专用扫描仪采用的气浮式运动平台工作范围为350 mm×350 mm,在该工作范围内等间隔选取3个横向和3个纵向,如图9所示,在每个测量轴上,按照第2节所述测量方法和过程,使用RENISHAW XL80激光干涉仪搭建测量光路,分别对定位重复精度、水平直线度、垂直直线度(平面度)、俯仰角误差和偏摆角误差等参数开展测试。

图9 测量布局图
气浮式运动平台的定位重复精度测试结果列于表2,对每个轴的3个测量方向分别进行两次测量。X轴的X01、X02和X03方向的测量结果均值为0.021 μm,Y轴的Y01、Y02和Y03方向的测量结果均值为0.015 μm。
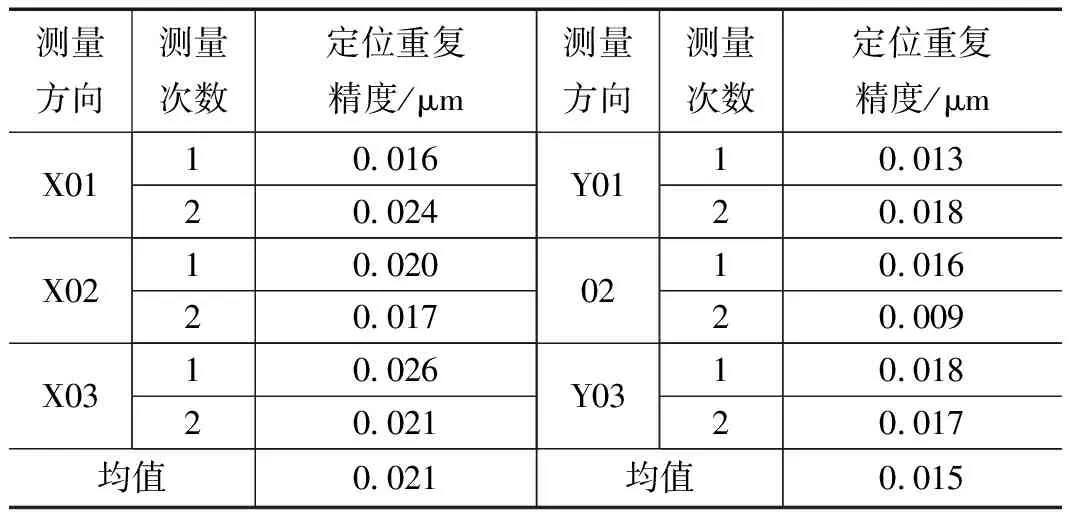
表2 气浮式运动平台定位重复精度测试结果
气浮式运动平台的水平直线度测试结果列于表3,对每个轴的3个测量方向分别进行两次测量。X轴的X01、X02和X03方向的测量结果均值为0.205 μm,Y轴的Y01、Y02和Y03方向的测量结果均值为0.152 μm。
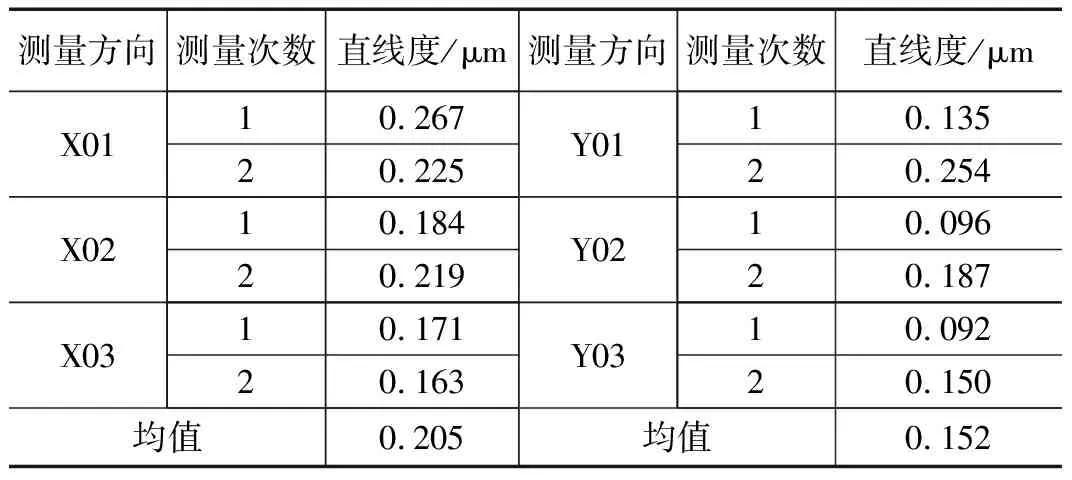
表3 气浮式运动平台水平直线度测试结果
气浮式运动平台的垂直直线度(平面度)的测试结果列于表4,对每个轴的3个测量方向分别进行两次测量。X轴的X01、X02和X03方向的测量结果均值为0.216 μm,Y轴的Y01、Y02和Y03方向的测量结果均值为0.178 μm。

表4 气浮式运动平台平面度测试结果
气浮式运动平台俯仰角的测试结果列于表5,对每个轴的3个测量方向分别进行两次测量。X轴的X01、X02和X03方向的测量结果均值为0.221″,Y轴的Y01、Y02和Y03方向的测量结果均值为0.245″。
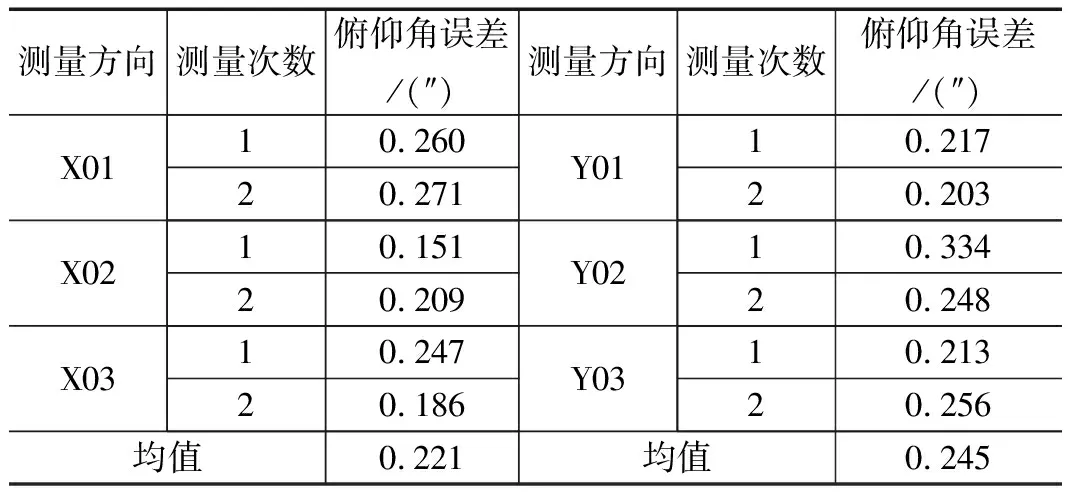
表5 气浮式运动平台俯仰角误差测试结果
气浮式运动平台偏摆角的测试结果列于表6,对每个轴的3个测量方向分别进行两次测量。X轴的X01、X02和X03方向的测量结果均值为0.183″,Y轴的Y01、Y02和Y03方向的测量结果均值为0.233″。
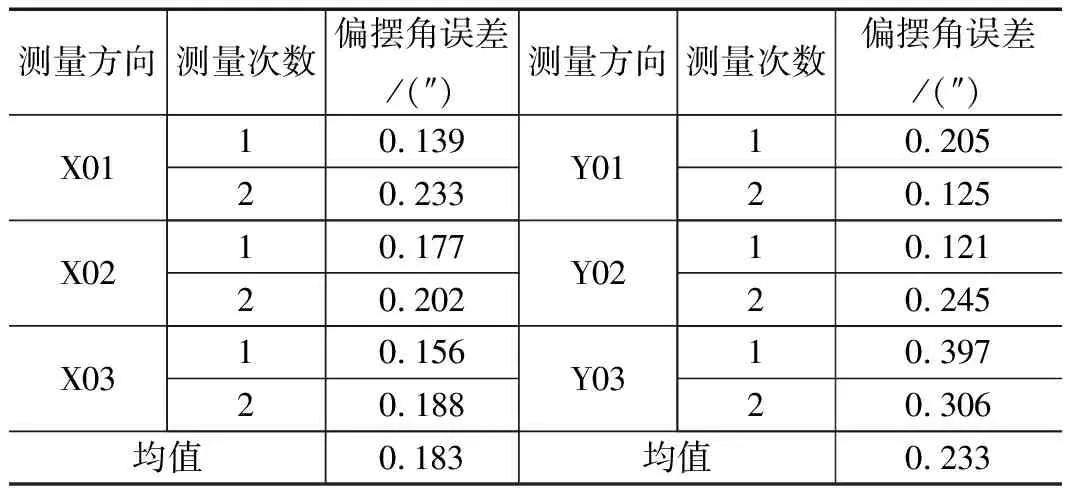
表6 气浮式运动平台偏摆角误差测试结果
对于“面扫描”方式,每个自由度误差对天文底片数字化的影响不同。其中,定位误差直接关系到底片步进运动的准确性,该气浮式运动平台的定位重复精度优于0.025 μm,这为后续通过系统补偿提高绝对定位精度提供保障;偏摆角误差表征底片姿态的变化,它影响图像拼接的准确性,考虑偏摆角误差优于0.3″,对于300 mm见方的底片边缘影响将小于0.4 μm;平面度和俯仰角误差主要影响拍照的对焦准确性,扫描仪采用的远心镜头景深超过0.1 mm,这两项参数的误差影响可以忽略。因此,该气浮式运动平台满足高精度天文底片扫描仪的研制需求。
4 结束语
对历史天文玻璃底片的数字化保存是全世界天文机构的共性紧迫需求,为切实响应IAU的号召,上海天文台正在实施高精度天文底片专用扫描仪的研制工作。气浮式运动平台是扫描仪的核心部件,其性能直接影响天文底片数字化的精度。作为扫描仪研制过程中的重要环节,使用RENISHAW XL80激光干涉仪对气浮式运动平台开展测试。结果表明,在350 mm×350 mm工作范围内,气浮式运动平台载物台的定位重复精度优于0.025 μm,直线度和平面度优于0.3 μm,俯仰角误差和偏摆角误差小于0.3″,满足高精度天文底片扫描仪设备的研制要求。
除上述参数性能外,气浮式运动平台的载物台还会产生沿运动方向的滚动角误差,以及X轴与Y轴的垂直度误差。滚动角误差与俯仰角误差类似,主要影响拍照的对焦准确性,较大的镜头景深对其要求不高;垂直度误差影响底片步进运动的准确性,前期利用大理石方尺测量结果为1.3″,该误差在定位重复精度高的情况下,同样可以通过系统补偿进行修正。利用激光干涉仪测试这两项参数,需要布置特殊的激光干涉光路和特殊的光学镜组,将在后续工作中进一步开展。
猜你喜欢
计量学报(2022年7期)2022-08-23 09:23:24
云南化工(2021年5期)2021-12-21 07:41:52
新教育论坛(2019年14期)2019-09-10 03:13:50
建材发展导向(2019年10期)2019-08-24 06:24:52
石油化工建设(2018年2期)2018-07-11 01:24:58
制造技术与机床(2017年6期)2018-01-19 02:41:19
电器工业(2016年8期)2016-03-08 04:44:05
重型机械(2016年1期)2016-03-01 03:42:06
时代农机(2015年3期)2015-11-14 01:14:59
电子世界(2014年23期)2014-10-21 12:55:13