
基于LSTM算法的门座式起重机减速箱故障诊断研究
2021-12-22 13:18梁敏健彭晓军刘德阳
计算机测量与控制 2021年12期
梁敏健,彭晓军,刘德阳
(广东省特种设备检测研究院 珠海检测院,广东 珠海 519002)
0 引言
近年来,随着起重机朝着高功率和大型化方向发展,其齿轮箱的工作环境变得复杂恶劣,故障出现概率增大,尤其老旧门座式起重机的安全形势严峻,定期检验往往不容易发现起重机减速箱内部潜在的风险和故障。如减速箱齿轮磨损、轴承内外圈故障、轴承滚子损伤等。这些故障势必降低起重机的使用年限,严重影响起重机的可靠性。目前上述故障往往借助定期检验和维护保养阶段起重机的拆解才得以被发现。目的性差,效率低下,成本高昂,自动化程度低。
起重机运行过程中势必会产生振动信号,目前常常采用振动加速度传感器来监测门座式起重机减速箱来了解门座式起重机的工作状况,进一步人工提取隐患特征,以找到门座式起重机潜在的故障源。例如,王利明提出振动信号的变尺度解调与振动特征提取算法并成功应用于齿轮箱运行状态在线监测系统[1]。王鹏基于Gabor变换的无键相阶次跟踪技术提取故障特征,实现了对旋转机械部件在不拆机条件下的状态监测和识别潜在故障源[2]。冯毅提出基于连续峭度与小波瞬时能量特征融合的故障特征提取方法[3]。
随着模式识别算法的发展,研究人员开始应用模式识别的方法进行旋转机械的故障诊断研究[4-7]。例如,吴福森提出支持向量机的起重机变速箱故障诊断方法[8],刘俊超提出基于ICA-SVM的起重机旋转故障诊断方法,实现起重机旋转故障的自动诊断[9]。杨武帮提出变分模态分解(VMD)改进小波信号预处理和粒子群算法(PSO)算法优化SVM的模型有效准确地实现了对起重机齿轮箱的故障识别和分类[10]。可见大多数传统的智能诊断是采用“信号处理的特征提取+模式识别”的方法。虽然识别率有一定的提高,本质上依然依赖人工设计与选择特征,难以获得最接近故障属性特征的自然表达,导致训练时间长且误差率较高,没有实现真正意义上的智能诊断。
随着Hilton提出深度学习理论,人工智能技术得到了进一步地发展,最著名的就是卷积神经网络和循环神经网络,其中循环神经网络是一种处理序列数据的递归神经网络,在自然语言处理方面有着广泛的应用[11-15]。近年来,越来越多的学者将该深度学习方法引入到故障诊断领域,例如,丁頔等人利用RNN算法,无需提取时频域特征即可实现对轴承故障的诊断[16]。曲星宇等人采用LSTM网络实现了对磨矿系统故障的诊断[17]。王鑫CNN-LSTM算法同样实现了对飞机的故障诊断的识别[18]。可见这类方法在大型机械中获得了较好的效果,但是RNN循环神经网络的存在梯度爆炸和梯度消失问题。因此,起重机减速箱的一维振动信号有很强的序列性,非常适合用循环神经网络进行处理,本研究拟建立基于LSTM神经网络的门座式起重机机械故障诊断分类模型,以期实现通过直接输入原始振动信号,便能自动快速获得门座式起重机减速箱机械故障的诊断分类结果。
1 门座式起重机故障诊断原理与方案
1.1 起重机减速箱故障诊断原理
减速箱是起重机重要的传动扭矩的部件,某二级齿轮减速箱结构如图1所示,主要包括齿轮副、轴系、轴承等部件,其可将电机的高转速传递到合适的低转速。

图1 起重机减速箱结构原理示意图
由于起重机工况复杂,尤其是港口门座起重机又常年工作在高湿高盐的港口环境中,减速箱容易产生运行故障,如齿轮的齿根/齿面磨损、断齿/缺齿、轴承滚子/内圈/外圈损伤等。上述类型的损伤均会在振动信号中体现出来。对于轴承,如果轴承表面出现故障时,滚子与故障部位接触就会产生振动信号,该信号是故障频率和轴承固有频率的叠加信号。对于齿轮,从动力学方程可知,齿轮平稳运行时,振动信号是啮合频率及其高次谐波的叠加,表达式如下:
(1)
式中,Am是幅值,f0是啮合频率,m是谐波阶次,N是谐波数。但是当齿轮发生故障时,齿间载荷、齿刚度等都随时间变化,因而振动信号的幅值、相位和频率均会发生调制现象[19],即
(2)
式中,am(t)是调幅函数,bm(t)是调相函数。由此可见,振动信号往往蕴含着某一类故障的信息。因此,如图1所示,本文拟在减速箱轴承支座部位放置三轴振动加速度传感器,以全面反映检测部位的振动状态。
1.2 门座起重机减速箱故障诊断系统方案
在上述诊断原理的基础上,本文设计了基于labview的起重机减速箱故障诊断系统总体方案,旨在实现对减速箱齿轮、轴承等关键部件进行振动数据的采集,数据处理和故障诊断分类。
该方案如图2所示,该系统包括三轴加速度传感器、信号调理模块、数据采集设备和上位机等硬件,软件包括系统设置、数据采集、数据处理、故障分类、数据存储、结果回放等模块。其中数据处理模块包括滤波,数据增强。故障分类模块包括LSTM模型训练和LSTM故障分类。

图2 基于labview起重机故障诊断系统总体方案
对于硬件部分选取PCB公司的三轴加速度传感器,其型号为356B18,灵敏度为1 000 mV/g;信号调理和数据采集模块选取了美国国家仪器公司CompactDAQ便携式数据记录仪,该模块包括NI9234数据采集卡和cDAQ-9174机箱。该模块最大采样频率为51.2 kS/s[20]。
对于软件部分,本文基于labview完成开发出了起重机故障诊断系统,设计并实现系统设置、数据采集、数据处理、故障分类、数据存储、结果回放等模块的功能。
1.3 门座起重机减速箱故障诊断流程
在上述原理和故障诊断系统设计的基础上,基于LSTM的门座起重机减速箱诊断流程如图3所示。

图3 门座起重机减速箱诊断流程示意图
流程分4个阶段:数据采集、信号预处理、模型搭建、模型应用。在数据采集阶段,首先将三轴加速度传感器置于某门座起重机减速箱的轴承支座处,利用本文开发的基于labview的起重机振动数据采集系统进行数据采集。在数据预处理阶段,将数据进行常规滤波处理后,对数据进行数据增强操作,并将数据集划分为训练数据集和测试数据集。在模型搭建阶段,首先建立LSTM模型,通过输入的训练和测试数据集对创建模型的参数进行不断更新,直到达到精度要求,保存更新后的模型参数,完成模型的搭建工作;在模型应用阶段,输入新采集的一维振动信号,运用训练好的LSTM模型对故障类型进行判断,从而完成整个故障诊断的工作。
1.3.1 数据采集阶段
由于平时收集带故障的门座式起重机减速箱数据比较困难,本文采用公开的故障数据集和现场收集的数据相融合的方式进行故障数据集的准备。
对于公开的数据集采用东南大学严如强团队整理的齿轮箱故障数据集[21],该数据集包括轴承滚子故障、轴承内圈故障故障、轴承外圈故障、轴承内外圈联合故障等四类类轴承故障和齿轮断齿、缺齿、齿面磨损、齿根磨损等4类齿轮故障。对于现场数据集。本文利用开发出的基于Labview的门座式起重机减速箱机械振动数据采集系统采集大型门座式起重机减速箱的振动信号。
融合数据集中各类型故障的典型振动信号如图4所示。
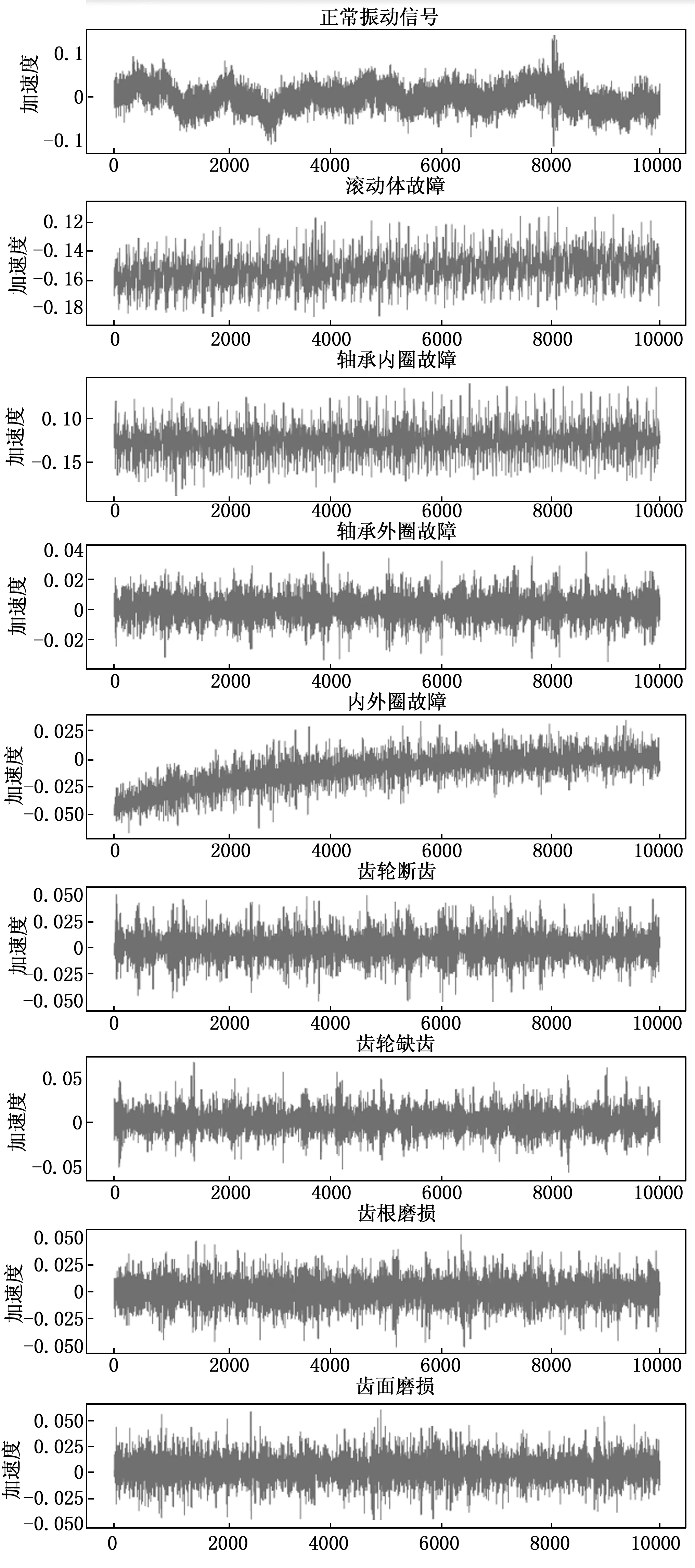
图4 各故障类型的振动信号
1.3.2 信号预处理阶段
样本的数量和质量直接影响深度神经网络的检测精度,为获得具有更好泛化能力的模型,提高分类的准确率,卷积神经网络需要大量的训练样本,而目前门座式起重机故障并没有诸如ImageNet等庞大的公共图像数据库,仅仅有一些著名的公开旋转机械数据集,而且未包含门座式起重机一些特有的故障特点,如低速重载、干扰信号多,因此为增强模型的泛化能力将数据集进行重叠采样,以增加数据样本。
图像增强的方法为几何变换(包括旋转、翻转和平移等)、像素调整(亮度调节、对比度调节和添加噪声等),通过增加数据样本来提高模型的鲁棒性与泛化能力,本文仿照图像增强的方式采取重叠采样的方法对门座式起重机振动信号进行如图5所示的数据增强[22]。即用等宽的窗口在振动信号上以一定的步长滑动,以获得样本信号,当步长比一个样本长度短时,样本间即有重叠,长度为L的振动信号被划分为N=(L-Nin)/s个样本,样本长度为Nin,窗口的滑移步长为s。最后根据通用数据集划分策略,将数据集随机分配成训练集(70%)、测试集(30%)。
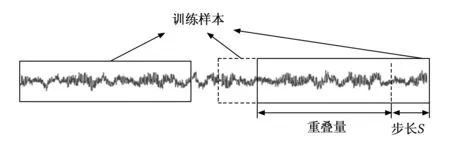
图5 数据增强原理示意图
2 基于LSTM算法的门座式起重机机械故障诊断模型
根据门座式起重机振动信号的特点以及现场检验所需的快速高精度要求,本研究采用LSTM的网络处理振动序列数据,构建门座式起重机机械故障诊断系统结构如图7所示。
2.1 典型的循环神经网络模型
循环神经网络是深度学习领域应用最多的模型之一,其常用LSTM的结构如图6所示[23]。
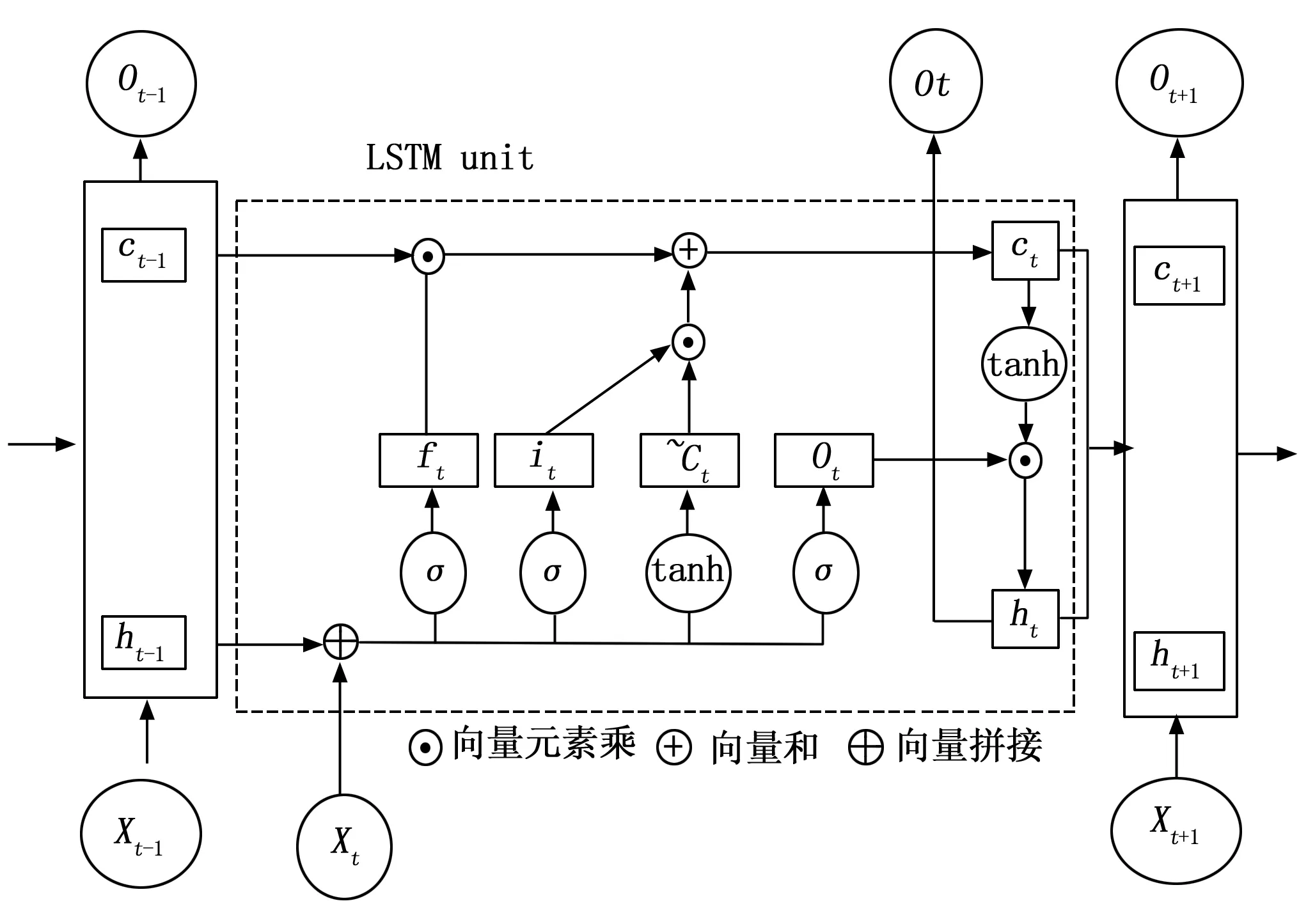
图6 长短期记忆神经网络(LSTM)的结构图
该种网络当前的输出与之前的输入有联系,即该网络对前面的信息的记忆且整合到输出的计算中,隐藏层的单元不再是无连接的,而且隐藏层的输入既有输入层的输出,也有上一时间隐藏层的输出。

图7 基于LSTM神经网络模型预测框架
本文拟采用的LSTM是RNN中的特例,其架构如图7所示,该结构描述的神经元可类比传统BP神经网络中隐藏层的神经元,只是输入和输出比BP神经网络特殊。每个LSTM神经元都有两个输入和两个输出,两个输入值分别是序列值xt和上次的记忆ct-1两个输出值分别是被更新的记忆单元ct-1和神经元更新的值ht。上述输入和输出值是通过LSTM的3个门机制和一个刷新记忆的结构控制,从而克服传统循环神经网络梯度爆炸和梯度消失的问题。
1)遗忘门:遗忘门ft是上一个状态ht-1和新的输入xt的函数,即介于0~1之间的sigmoid激活函数作用于ht-1和xt的每一个元素,得到遗忘门ft。遗忘门ft和上次记忆单元ct-1相乘,从而决定着多少百分比的记忆ct-1被下一次使用,遗忘门的表达式如式(3):
ft=σ(Wfxt+Ufht-1+bf)
(3)
式中,Wf和Uf是要估计的参数矩阵,bf是偏置。
xt是LSTM的输入向量,ht-1是上一个LSTM单元的输出值。
2)输入门:输入门和遗忘门计算方式很类似,计算方式如(4)所示:
it=σ(Wixt+Uiht-1+bi)
(4)
输入门it同样也是上一个旧的状态向量ht-1和新的输入向量xt的函数,即介于0~1之间的sigmoid激活函数作用于ht-1和xt的每一个元素,得到输入门it。
(5)
其中:候补记忆单元表达式如式(6)所示:
(6)
式中,tanh是双曲正切激活函数。
4)输出门:LSTM的输出首先通过输出门进行更新,表达式如(7)所示:
ot=σ(Woxt+Uoht-1+bo)
(7)
接着结合输出门ot,将内部的信息传递给外部状态ht:
ht=ot°tanh(ct)
(8)
式中,tanh函数是值域介于-1~1之间的双曲正切函数,该函数作用于更新后的记忆单元ct后和输出门相乘,从而得到LSTM的输出。
2.2 基于LSTM神经网络的门座起重机机械故障模型
图7为基于LSTM神经网络模型预测框架,该网络包括输入层、LSTM层、全连接层、输出层等部分,输入层是经过重叠采样增强处理过的振动信号,每个样本1 024个点,重叠滑移步长设为14。LSTM层单元大小为32,以增大输入的信息量。具体参数见表1。

表1 LSTM的网络参数结构类型
3 实验结果与分析
3.1 实验平台与模型训练
长短期记忆神经网络门座式起重机机械故障诊断模型使用Python编程语言及Keras深度学习框架实现,模型训练的硬件环境为Intel i5 CPU,16 G RAM,NVIDIA GTX1050 GPU。
使用融合数据集中70%数据作为训练集,设模型训练的超参数学习率为0.000 1,批尺寸为128,最大迭代数(epochs)为40。模型训练的损失值曲线如图8所示。经对比,基于LSTM的诊断模型比传统的基于CNN诊断模型在损失值方面表现出更为优异的性能。

图8 训练集损失值曲线
3.2 实验测试与结果分析
以融合数据集中30%的数据作为实验数据(测试集),使用基于LSTM的算法模型进行故障诊断识别。为准确分析试验结果和算法模型的性能,除使用准确率A(Accuracy)作为结果评价指标外,针对每一类故障识别结果分别采用精确率P(Precision)、召回率R(Recall)以及F1值对模型的故障识别结果进行全面评估,具体计算标准如式(9)~(11)所示,其中F1值是精确率和召回率的调和均值。上述指标的取值范围均在0~100%之间,并且越大越好。
(9)
(10)
(11)
式中,TPi为样本实际是i类且模型识别为i类的数量;FPi为样本实际不是i类但模型识别为i类的数量;FNi为样本实际是i类但模型识别不为i类数量。
将测试集样本输入分类模型,根据分类结果得到混淆矩阵如图9所示,进而计算出模型处理振动信号的性能指标如表2所示。
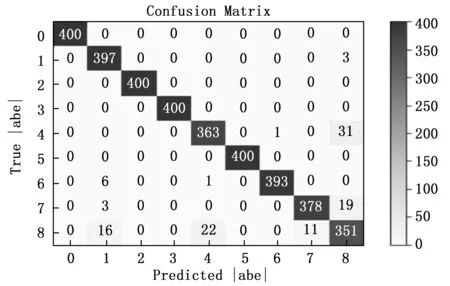
图9 门座式起重机机械故障诊断的混淆矩阵

表2 基于LSTM门座式起重机机械故障诊断模型的性能指标
通过表2可以发现,基于LSTM的故障诊断模型对门座式起重机减速箱故障的各种类型故障预测精确率均在87%以上,召回率在88%之上,最终故障诊断整体准确率达到了96.8%,满足门座式起重机故障诊断现场检测的精度要求。而从表3可以看出,基于CNN的故障诊断模型对门座式起重机减速箱故障的各种类型故障预测精确率最低在70%左右,召回率最低66%,最终整体准确率只有92.66%,比LSTM低4.1%,从而证明基于LSTM在准确率和稳定性方面的优势。
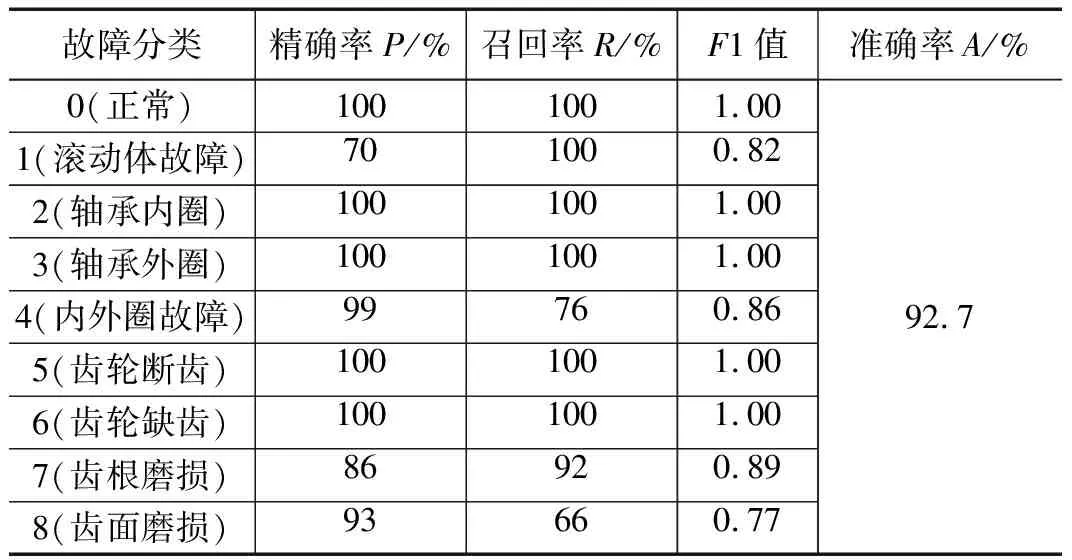
表3 基于CNN门座式起重机机械故障诊断模型的性能指标
4 结束语
针对门座式起重机减速箱机械故障智能诊断和分类问题,基于长短期记忆神经网络设计了应用于门座式起重机减速箱振动信号的自动诊断分类模型。借助东南大学齿轮箱数据集以及现场采集的门座式起重机振动数据,建立了门座式起重机减速箱机械故障数据集。使用数据增强的方式对数据集进行预处理。采用测试数据集对模型的精度与复杂度进行了测试实验,实验结果显示,该模型能够实现门座式起重机减速箱机械故障分类的整体准确率达96.8%,比传统的CNN网络精确性和稳定性更优,结果表明该模型能够准确地对门座式起重机减速箱机械故障进行准确分类,能初步满足现场检验对快速检测的要求。在下一步的工作中,将继续搜集各类门座式起重机减速箱故障数据,扩充数据集,提高模型识别准确率,同时将研发便携式门座起重机减速箱机械故障智能诊断系统,提升模型的实用价值。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
舰船科学技术(2022年11期)2022-07-15
汽车实用技术(2022年9期)2022-05-20
中国电气工程学报(2020年12期)2020-10-27
中国电气工程学报(2020年3期)2020-07-31
人大建设(2019年9期)2019-12-27
汽车与驾驶维修(维修版)(2019年7期)2019-09-10
科技风(2018年23期)2018-05-14
设计(2017年13期)2017-10-31
企业文明(2016年8期)2016-05-14
