基于力位协同控制的航天器多路射频频谱监测系统设计
2021-12-22 13:18:08王学良
计算机测量与控制 2021年12期
吴 敏,王学良
(中国科学院 微小卫星创新研究院,上海 200120)
0 引言
实时监测多路射频信号,可以实现对射频频谱监测系统的控制,射频信号在许多领域都得到广泛应用,例如卫星通信、无线电广播、航天器控制等领域。力位协同控制是通过将力量信息与位置信息有效融合,使航天器多路射频驱动结构到达指定位置,实现航天器多路射频部件之间的完美配合。在航天器多路射频频谱监测过程中,力位协同控制是产生运动轨迹、估计调姿误差、估计调姿机构力位的基础。在卫星通信系统中,对多路射频信号的监测,主要监测的内容是射频信号的传输范围和测量精度,实时监测无线电广播电视基站对多路射频信号,主要监测射频信号的强度以及射频数据的变化,对射频信号的监测意义重大[1-2]。
随着航天器技术的快速发展,基于力位协同控制,射频信号影响着航天器测试的质量,航天器与地面建立联系的通信链路,其数量随着射频信号的增强而增多,通信链路越多,航天器与地面测控站的信息交互越频繁,因此对射频信号进行有效的监测可以提高航天器与地面测控站的信息交互强度。文献[3]提出基于开关矩阵的卫星通信测控站多路频谱监测系统设计,利用接入基带上行中频信号,获取遥控信号频谱,通过USB接口连接计算机与频谱分析仪,实现频谱分析仪实时显示,基于开关矩阵,采用串行EEPROM器件,内集成总线为双线串行进行数据传输,采用MAX3232芯片实现多路频谱监测系统软件流程,实现卫星通信测控站多路频谱监测系统设计。文献[4]提出载人航天器与伴随卫星间射频系统电磁兼容性分析方法,建立了基于射频系统收发参数的电磁干扰安全裕度模型,分析了载人航天器接收天线伴随发射天线所产生的等效干扰。从载人航天器与伴随卫星的在轨电磁兼容的角度出发,给出了航天器之间兼容工作的最小相对距离计算方法。虽然上述研究取得一定进展,但频率偏差较大、扫频和随机扫频对射频频谱的监测效果较差。为了解决以上出现的问题,设计了基于力位协同控制的航天器多路射频频谱监测系统,给出了硬件结构和软件流程,最后通过实验研究,验证了本文系统的工作效果。
1 基于力位协同控制的航天器多路射频频谱监测系统硬件设计
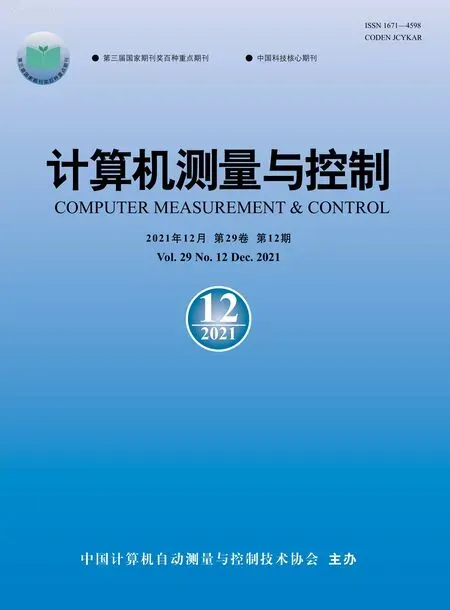
基于力位协同控制的航天器多路射频频谱监测系统硬件主要由频谱分析仪、单片机和控制单元三部分组成[5-6]。系统硬件结构如图1所示。
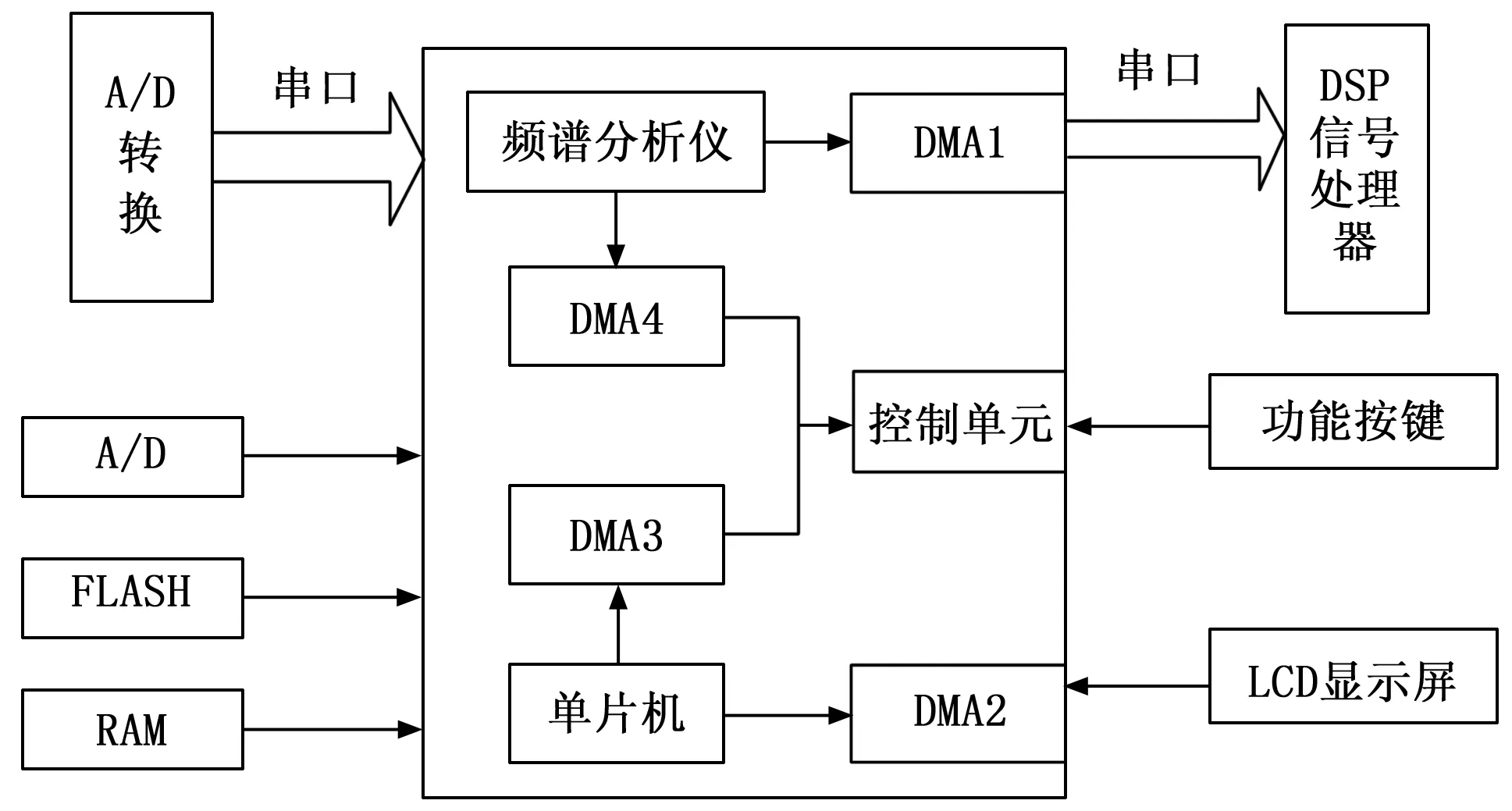
图1 基于力位协同控制的航天器多路射频频谱监测系统硬件结构
1.1 频谱分析仪设计
基于力位协同控制的航天器多路射频频谱监测系统中的频谱分析仪是本文系统的重要设备,该频谱分析仪的测量范围为2~39.88 GHz,属于频率覆盖中频范围,在3~4 GHz的频段上,具有-100 dBm的噪声电平,分辨率带宽为5 GHz,可以同时监测4路射频信号[7]。频谱分析仪结构如图2所示。
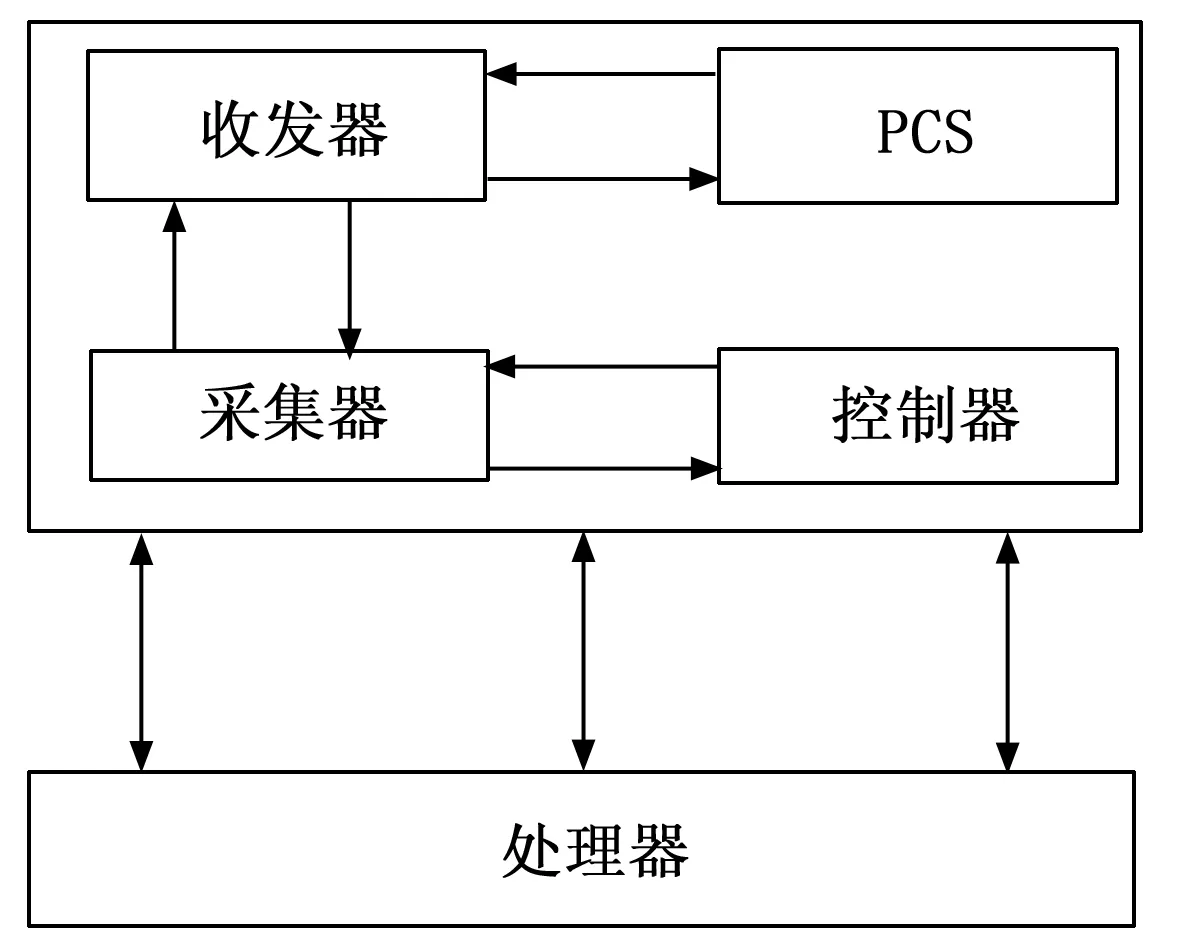
图2 频谱分析仪结构
针对频谱分析仪的控制接口,考虑力位协同控制,可采用其他系列的控制接口,因为频谱分析仪的控制接口基本上是相同的,因此可以交替进行使用,这样大大提升了航天器多路射频频谱监测系统的通用性[8]。
1.2 单片机设计
基于力位协同控制的航天器多路射频频谱监测系统的单片机为监测系统的CPU,该单片机的生产成本较低,具有所占体积较小、使用功耗较低的优势,是一款性能较好的单片机[9-10],考虑力位协同控制,充分满足了航天器与地面测控站的信息交互需求。单片机最大工作频率是72 MHz,内置32 K字节的闪光点、2个计时器、20 K字节 RAM、2个同步串行通讯接口、4个异步串行通讯接口、多个I/O接口和UART接口、6个SPI接口,其内核为ARM16位的8051[11-12]。单片机串口如图3所示。
图3 单片机串口
该单片机还具有1个模数转换器,转换时间为2 μs,转换范围为0~7.2 V,对航天器射频频谱具有保持功能,满足航天器多路射频频谱监测系统对射频信号的采样需求,提升了射频信号的刷新率,实现了对射频频谱的监测和控制[13-14]。
监测系统的电路主要为系统提供电源,并进行短路保护、失调电压的调零,电路选用单电源为系统进行供电,瞬时电压最高可达12 V,最低电压为1.8 V,工作电压为8.5 V,工作电流为3.3 A,由于系统单片机的模数转换器不能采集负值,因此需要将航天器多路射频信号进行放大,并添加直流偏置电压,电压输入范围为0~5 V,电压采集精度为5 mV。系统电路结构如图4所示。

图4 监测系统电路结构
1.3 控制单元设计
监测系统的控制单元采用TI公司生产的商用PC机,内置双核CPU,其工作主频最高可达3.45 GHz,正常工作频率为2.58 GHz,具有8 GB的内存,可存储多种射频频谱数据,控制单元的内部配置了网卡,可为多路射频信号的传输提供较高的网速[15]。控制单元结构如图5所示。

图5 控制单元结构
控制单元内具有一款成本较低、精度较高的放大器和A/D转换器,放大器的放大倍数为1~15 000倍,能使单片机内模数转换器放大多路射频信号,A/D转换器属于16位逐次逼近型转换器,其转换速度快,可迅速将多路射频信号转换成数字信号,以方便航天器与地面测控站进行信息交互,以保证多路射频信号通过各种接口进行传输,控制单元主要实现对监测系统中频谱分析仪和单片机的控制,以及对多路射频频谱进行监测[16]。
2 基于力位协同控制的航天器多路射频频谱监测系统软件设计
基于力位协同控制的航天器多路射频频谱监测系统软件流程如图6所示。

图6 基于力位协同控制的航天器多路射频频谱监测系统软件流程
首先,对多路射频信号的频谱进行切换。频谱分析仪和监测软件建立连接后,频谱分析仪识别控制命令库中的控制命令,并向系统发送控制命令,搜索命令库中的频谱切换命令,转换成程序语言。通过程序语言向航天器提供控制接口,在频谱分析仪上设置射频信号的频谱带宽参数,将频谱带宽参数代入频谱程序语言内,同时基于力位协同控制,将频谱切换命令封装成功能函数,通过功能函数判断频谱带宽参数是否超出了频谱分析仪的限定范围,若超出限定范围,则构建射频信号控制命令,对射频信号控制命令的长度以及频谱带宽参数进行初始化,若未超出频谱分析仪的限定范围,则根据频谱切换命令对多路射频信号的频谱进行切换[17-18]。
然后,显示多路射频信号的频谱。对多路射频信号的频谱切换完毕后,为了实时显示切换后的频谱,需要向频谱分析仪发送控制命令,频谱分析仪接收控制命令后,保存当前切换的多路射频信号的频谱图像。保存完成后,通过无线通信传输系统将保存的频谱图像发送至频谱监测系统,监测系统接收频谱图像后,将其以GIF文件格式进行存储。考虑力位协同控制,监测系统的控制单元通过查询控制命令找到监测系统存储的频谱图像文件,并以堆方式读取频谱图像文件,读取完毕后将其临时存储到流对象指针内,频谱分析仪通过频谱切换过程中创建的功能函数对频谱图像进行初始化,通过控制单元调用功能函数中的射频信号响应函数,调用完毕后按照刷新控制命令刷新频谱图像所在的内存区域,并将刷新信息定时发送出去,功能函数对发送出去的刷新消息进行及时响应,频谱分析仪得到响应消息后,发送频谱图像显示控制命令,监测系统接收频谱图像显示的控制命令后,显示多路射频信号的频谱图像[19-20]。
最后,对射频信号的频谱进行监测。多路射频信号的频谱显示完毕后,需要对其进行实时监测,在监测时,需要读写每路射频信号的测量数据,测量每路射频信号的频谱带宽、显示电平、中心频率等参数;测量完毕后,对测量的射频信号的数据状态进行监测,根据监测通道的类别对射频信号的频谱进行轮巡监测。
3 实验结果与分析
为了验证本文设计的基于力位协同控制的航天器多路射频频谱监测系统的实际工作效果,将基于动态频率选择技术的航天器射频频谱监测系统与本文系统进行对比实验。实验的相关参数为:频谱更新的时间间隔为2 ms,每个射频信号的频谱分辨率设置为20 dBm,输入功率在-30~-10 dBm动态范围内,输入频率范围为5~50 GHz,为保证实验结果的有效性和严谨性,其他实验条件均相同。
基于以上设置的实验参数,首先针对不同系统的频率偏差进行实验。将多路射频信号的频谱输入到频谱分析仪中,切换微波开关矩阵,多次测量在不同的频率范围内多路射频信号的频谱偏移量,利用监测系统中的场放设备收集频率数据,为了获得精度较高的频率偏差,需要多采集不同频率下的频偏值,并对频率数据和多路射频信号进行拟合,拟合后的频偏量和不同频率下的频偏差值可反映监测系统的频率偏差情况,频率偏差越高,系统对航天器多路射频频谱的监测效果越差,频率偏差越低,监测效果越好,本文设计的基于力位协同控制的航天器多路射频频谱监测系统对比结果如图7所示。

图7 频谱偏置校正图
通过图7可以看出,通过对实验结果进行分析,本文系统的频率偏差较低,频谱校正后偏差与温度—频偏特性曲线基本一致。由此验证了本文系统的频率偏差监测效更好。针对监测系统中扫频和随机扫频对多路射频带宽频谱的监测效果进行对比实验,监测结果如图8所示。
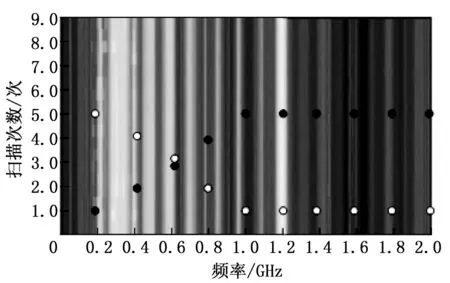
图8 带宽频谱监测结果
由图8可知,采用频谱分析仪分析监测并保存250 s的多路射频信号,利用扫频和随机扫频对多路射频数据进行离线操作,由于多路射频信号中的下行链路信号较为稳定,且下行链路信号的传输信道变化较小,在利用扫频进行离线操作时,设置扫频的采样时间间隔为25 s,对下行链路信号频谱的采样只需要6次即可,随机扫频的采样时间间隔设置为12.5 s,需要进行12次采样。对于多路射频信号中的时变信号,其传输速度较快,且频率变化范围较大,不容易捕捉时变信号频谱的变化,因此采用扫频对时变信号频谱进行采样的时间间隔为30 s,采样次数为5次,随机扫频对时变信号频谱的采样时间间隔为50 s,采样次数为3次,采样完成后统计扫频和随机扫频的频谱采样数值,两种监测系统的扫频和随机扫频的频谱监测结果如图9所示。

图9 扫频和随机扫频频谱监测结果
由图9可知,对于多路射频信号中下行链路信号的频谱监测,本文系统中扫频和随机扫频的频谱监测数值较高;对于多路射频信号中时变信号的频谱监测,本文设计的基于力位协同控制的航天器多路射频频谱监测系统中,扫频和随机扫频对时变信号频谱的监测数值较高。由此可见,本文系统的扫频和随机扫频可以很好地完成频谱监测。
综上所述,本文设计的基于力位协同控制的航天器多路射频频谱监测系统的频率偏差更低,扫频和随机扫频对多路射频频谱的监测效果更好。
4 结束语
为了解决以往航天器射频频谱监测系统出现的:频率偏差较高、扫频和随机扫频的频谱监测效果差等问题,本文设计了基于力位协同控制的航天器多路射频频谱监测系统,该系统硬件方面设计了频谱分析仪、单片机、电路、控制单元,完成了对多路射频频谱的采样、切换和控制,软件方面给出了软件流程,最后通过实验研究验证了本文系统具有更低的频率偏差,多路射频频谱的监测效果更好。
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
流程工业(2022年3期)2022-06-23 09:41:06
空间科学学报(2021年6期)2021-03-09 06:20:14
航天器环境工程(2020年3期)2020-11-04 06:46:24
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
电子测试(2017年12期)2017-12-18 06:35:24
电子制作(2017年8期)2017-06-05 09:36:15
通信技术(2016年12期)2016-12-28 10:34:54