小型水面垃圾清理机器人的设计与实现*
2021-12-21 07:18江笑雨陈加粮周浩岚
吉首大学学报(自然科学版) 2021年3期
江笑雨,陈加粮,周浩岚
(吉首大学信息科学与工程学院,湖南 吉首 416000)
全国各地分布着众多的小型人工湖,如校园、景区内的观赏湖等,湖上经常漂浮着塑料袋、矿泉水瓶等生活垃圾以及落叶等自然垃圾.这些垃圾不仅影响环境的观赏价值,也让清洁人员很难进行无死角打捞.人工打捞不仅工作量大,而且难以保障人身安全.我国目前所使用的水面垃圾清理机器人,大部分是从国外进口的,价格昂贵,维修成本极高[1].这不仅耗费大量人力、物力和财力,还影响设备的正常使用.国外设备大部分是采用双体船,外形较大.国内研发的一般也是大型机器,较多应用于大型自然水面[2],对于小型人工湖的实用性不强.为解决这些问题,笔者设计了小型水面垃圾清理自动智能化机器人.该机器人为智能化机器人,操控者利用手机APP监察位置,通过遥控器来控制机器人进入特殊水域作业,能确保人身的安全.主体采用与常用塑料不同的可再生资源PLA聚乳酸热塑性聚合物,经济且环保.传送带设计借力科学,行动更敏捷轻松,该机器人非常适合在小型区域开展清洁工作.
1 框架设计
这款机器人基于arduino 开源系统,使用arduino uno开发板为主要的控制核心,联合其他控制模块来控制水面垃圾清理,在结构上以“过滤”的理念设计出空中心形态,采用遥控的方式代替人工操作,省时省力且能保证工作人员的安全[3].操作人员可以通过遥控器来控制机器人前进、后退、左转、右转.当机器人运行时,传送带一半延伸到水中,一半延伸到存储装置中.整体结构如图1所示.当整个装置中两个螺旋桨推动机器人前进的同时,传送带也开始转动.由于沾上水之后的吸附力,水面的漂浮垃圾会被传送带统统“吃”进去,然后随传送带滚动的过程中会把垃圾滚进去,而水会因为自然的重力被留在装置外面.制作机器人的材料包括木材、金属、塑料等.其中金属为主要的材料, 其强度高、不易磨损、有良好的延展性等.但加工成本会高,而且金属在遇到水中的电解质时会被腐蚀.经过多次实验操作,结合经济性和轻量化的要求,我们决定采用PLA 3D打印材料作为整体结构.PLA聚乳酸是一种热塑性聚合物,来自可再生资源.该材料与其他常用塑料不同,它可通过不可再生的石油蒸馏和聚合获得,设计更加符合环保理念.在打印时可以提高打印密度,进而提高强度和刚度,达到我们预期的标准.由PLA材料构成的两个船型空心体用来提供浮力,并在内部放置电机.尾部连着两个螺旋桨驱动,上部为有一定厚度的隔离层用于安放控制装置.垃圾收集由前方传送带完成,它把收集到的垃圾传送到后方垃圾收集装置.收集装置由网状结构组成,呈长方体型,为可替换式收集箱.

图1 整体结构
水面垃圾清理机器人主体构造采用的是小水线面双体船结构,利用中间空腔进行垃圾的收集及储存[4].潜没于水中的两侧船型空心体、高于水面的平台由连接上下部分的支柱构成有效组合体,可减少受水浪干扰力,具备优越的耐波性和更富余的利用空间等优点.
2 收集装置
收集装置包括垃圾打捞装置、存储装置以及动力装置[5].整个打捞装置运用了过滤的原理,保证机器人所过之处垃圾皆被清理.收集装置采用了传送带设计,传送带一半延伸到水中,另一半延伸到垃圾收纳箱中,当整个装置中两个螺旋桨推动的同时,传送带也开始传动,整个装置前进.机器人行经水面时,充分利用水面垃圾的漂浮性质,并借助垃圾沾上水之后的吸附力,将垃圾吸附到传送带上,然后随传送带进入垃圾收集装置中.这样,垃圾清理机器人运动轨迹上所有的垃圾就会被清理干净.
3 储存装置
储存装置采用网状设计,因为设备在运行中会有水随着垃圾进入而被带入收集器中,笔者参考了渔网的性质,采用了柔性的网状储存装置,网状的内部收集器能将水过滤出去,避免了因为垃圾的重量过大而影响运行.其中卡扣的设计思想,非常方便地进行设备的摘取和安装,操作简单方便.同时,双面体船身为垃圾储存提供了更充足的空间,提高了产品实用性,整个装置具有打捞速度快、收集容量高等特点.
4 控制装置
控制设计采用arduino uno开发板作为主要的控制核心.arduino可利用类C语言来进行编程,而且有图形化的编辑器,容易操作.核心控制电路系统如图2所示.为实现实时监控,采用HC05蓝牙模块连接控制,和手机App进行连接,当手机发出信号时,蓝牙模块把信号传给AS32无线模块,无线模块将指令传递给主板arduino uno,主板读取AS32模块接收到的指令,根据指令控制两个直流电机和两个步进电机.其中直流电机为垃圾清理机器人提供动力来源,步进电机分布在收集装置履带的两侧,给收集装置提供动力来源.整个控制装置安装在机器人的上部,采用上盖封装结构,其中部分连接采用防水贴来提高防水能力.

图2 控制系统电路
5 动力装置
提供动力来源的主要是直流电机和步进电机.为满足行进要求,笔者采用了直流电机,电压在12 V的时,空转可达到10 000r/min左右,动力满足模型需求.螺旋桨为树脂材质,也用3D打印的方式得到成品,其硬度和强度也可以满足需求.因为直流电机避免不了在水下运行,所以提前用塑料封装好,连接处使用防水胶,就可以达到在水下运行的目的.
因为传动的精度要求远比行进的要高,所以不适宜采用直流电机来直接驱动.为满足转动要求,于是使用步进电机,为履带提供动力来源.履带收集的动力装置如图3所示,具体型号28BYJ48.这款电机在输出扭矩上符合要求.步进电机的驱动模块采用ULN2003驱动板.ULN2003是由7个硅 NPN 达林顿管组成, 其电路的特点是在 5 V 的工作电压下能与TTL和CMOS电路直接相连,可以直接处理原来需要标准逻辑缓冲器来处理的数据,由arduino控制板传出的信号可以直接给到步进电机驱动,进而控制电机的转动.
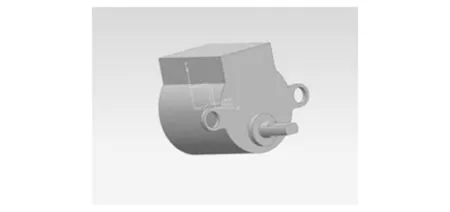
图3 收集的动力装置
随着智能时代的到来,便捷、安全的机器人替代人的体体力劳动是大势所趋.本产品为全自动水面清洁机器人,具有智能化及多功能集合的特点.船体为小水线面双体船结构,相对于市面上的单体船,稳定性更强,空间更充足,可装载更多的垃圾.小型化设计有利于机器人在狭窄水面工作,这在目前还算是一个空白,市场吸引力巨大,竞争较小,消费者需求旺盛.该小型水面垃圾清理机器人经过多次实验、逐步优化,具有操作简易、结构简单、成本低廉、绿色环保的特点.
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
中学生数理化(高中版.高一使用)(2021年1期)2021-03-19
课外生活(小学1-3年级)(2020年2期)2020-03-09
电子制作(2019年23期)2019-02-23
电机与控制学报(2018年9期)2018-05-14
中学教学参考·理科版(2016年11期)2017-06-08
科普童话·百科探秘(2015年6期)2015-10-13
新高考·高一物理(2015年5期)2015-08-18
滇池(2014年5期)2014-05-29