基于多驱动的变频调速系统的控制策略*
2021-12-21 07:18:30胡小锋
吉首大学学报(自然科学版) 2021年3期
胡小锋
(湖南交通工程学院,湖南 衡阳 421001)
多驱动变频调速系统是在传统的交-直-交间接变频调速系统的基础上发展起来的.在实际工业应用中,将不同功率等级的逆变单元接在同一个直流母线上.根据实际工况要求,选用尽可能大的功率等级整流单元,不仅可以节省投资,还可以降低能耗,最大化运用能源.所以多驱动的变频调速系统已经广泛运用到了工业领域.但是,由于直流母线上的电容器组体积较大,使传统多驱动变频调速系统难以满足要求集成度高、体积小的应用场合.笔者提出了一种新型的多驱动的变频调速系统的拓扑电路,并分析拓扑电路的换流策略和控制策略,最后通过Matlab仿真来证实了本拓扑电路的有效性和可靠性.
1 拓扑电路
传统使用的多驱动变频调速系统,如图1所示.

图1 传统的多驱动变频调速系统
当前最新的多驱动变频调速系统的拓扑电路,包括整流和逆流两部分,其中含有直流环节,但是却没有储能元件.逆变部分由多个传统三相PWM逆变器组成,如图2所示.整流部分由12开关组成,能量可以双向流动,整个系统拓扑电路如图3所示.
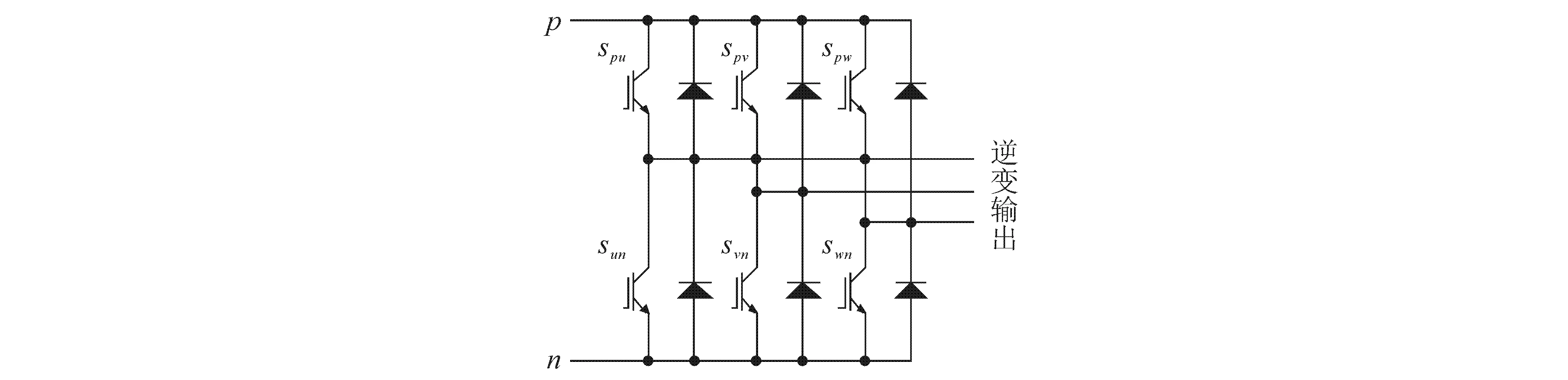
图2 三相PWM逆变电路
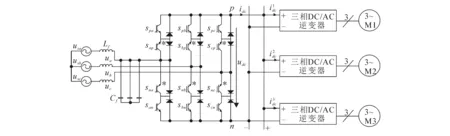
图3 新型多驱动调速系统的拓扑电路
2 换流策略
因为输出侧是使用的传统三相DC/AC逆变器,逆变器里面的逆变部分换流问题可以通过使用插入死区时间未解决.输入侧开关采用零电流换流法[1],它的基本原理是:输入侧开关换流时,先使逆变部分工作在零矢量状态,直流电流idc为零,从而减少了开关损耗.以a相换b相为例,在断开a相之前,先使各逆变单元工作零矢量v0或v7,idc=0,然后b相接通,从而实现安全换流,如图4所示.

图4 12型开关整流电路的零电流换流
3 控制原理
本系统的控制原理包括单位输入功率因数的PWM整流控制,其次还包括输出电压的空间矢量的逆变控制.为了简化问题的分析,作如下假定:
(1)输入侧无LC滤波器:
Lf=0,Cf=0,usx=ux,Isx=Ix,X=a,b,c.
(2)三相输入电压:
(1)
(3)负载1三相输出电流:
(2)
(4)负载2三相输出电流:
(3)
(5)负载3三相输出电流:
(4)
(6)三个负载的功率因数角分别为φ1,φ2,φ3.
方程组(1)~(4)中:wi是输入电压及电流的角频率;w01,w02,w03分别是1,2,3路负载的输出电压及电流的角频率;φ01,φ02,φ03分别是1,2,3路负载u相输出电流的初相角;U1是输入相电压的最大幅值;I01,I02,I03分别是1,2,3路负载输出相电流的最大幅值.
3.1 PWM整流控制
首先将三相输入电压分成六个区间,其中每个区间的三相电压的极性都保持不变,在三相中,有一相电压具有正相或负相的最大的幅值,如图5所示.
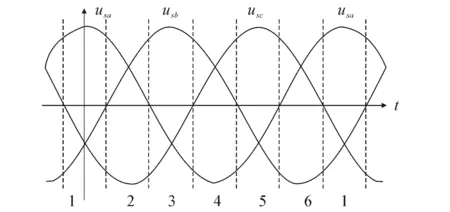
图5 一个周期内三相输入电压的六个区间
然后将一个开关周期ts分为两部分,其中两部分的输入侧开关的组合是不同的.为了获得最大输出的电压和减小开关的损耗,因此每个区间内都固定一相输入的电压于直流正极p端或负极n端,如表1所示.
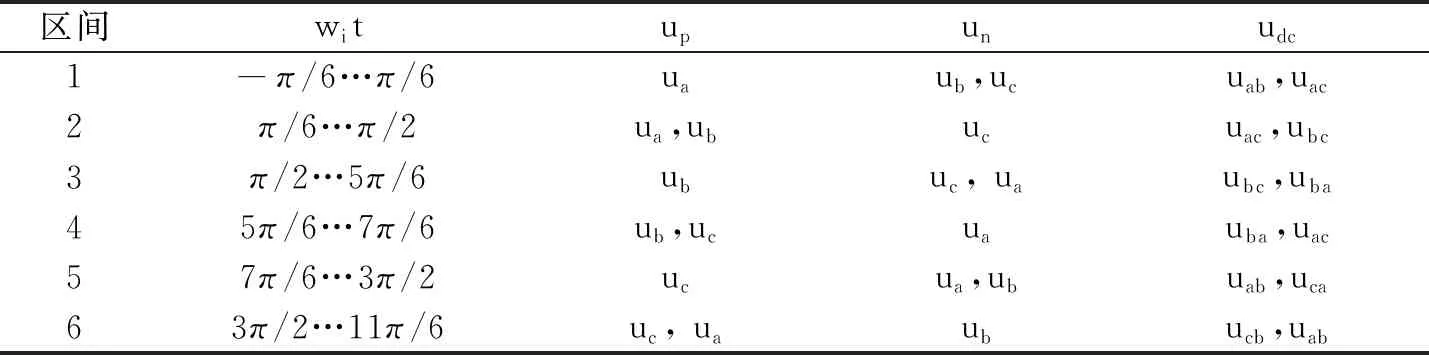
表1 输入相电压的钳位表
下文以第3区间为例,论述单位输入功率因数的PWM整流控制.因为b相固定直流的正极p端,在开关周期内的直流电压udc,分别为线电压ubc和uba,可以计算出一个开关周期内直流电压的平均值,
(5)
dbc+dba=1.
(6)
其中dbc,dba分别为ubc和uba在一个开关周期内的导通率.
想获得单位输入功率的因数,一定要保证其中基波的输入电压和输入电流之间成比例关系:
(7)
由式(3)~(6)可求得
(8)
3.2 SVPWM逆变控制


(9)
同理可求得负载2和3的有效矢量和零矢量的作用时间,从而

(10)

(11)
综合式(9)~(11)可求得

(12)
由式(7),(12)可求得
图6以负载1为例说明了一个开关周期的PWM调制过程以及零电流换流的实现过程.为了使整流侧安全换流,逆变侧必须具有最小零矢量作用时间tmin,因此最大电压传输比Mmax<0.866.
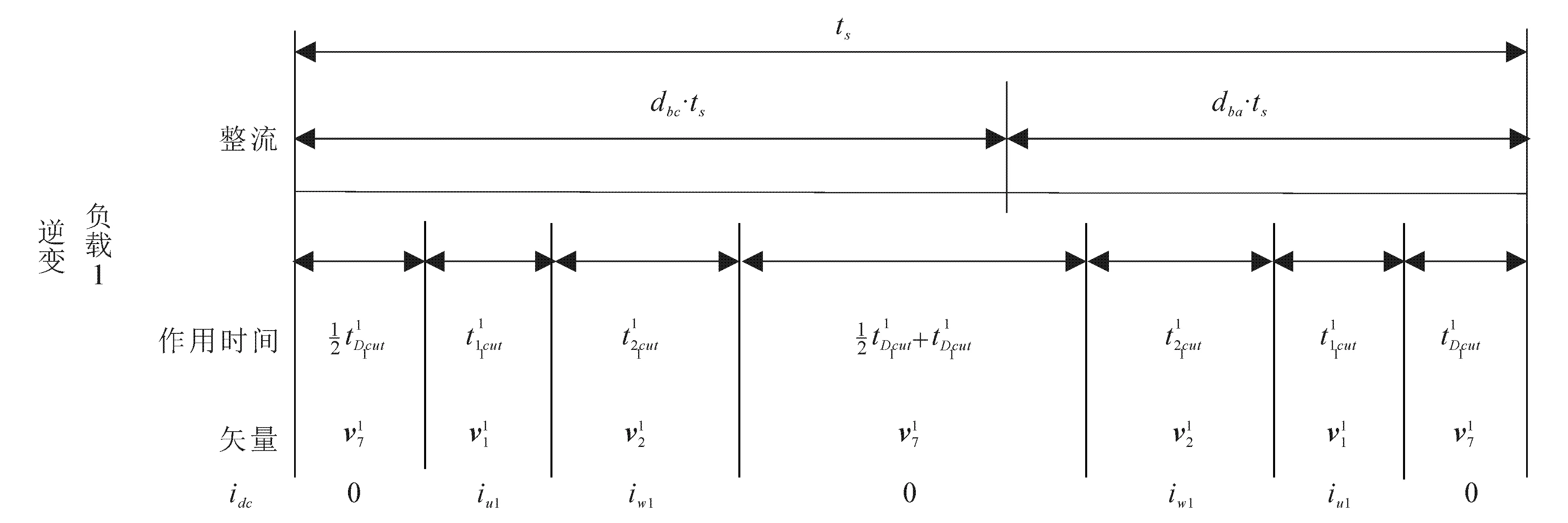
图6 负载1的PWM调制过程
4 仿真结果
通过MATLAB/SIMULINK对图5拓扑电路做了如下仿真实验.本仿真使用的变换器参数如下:
输入部分:UN= 380 V,fN=60 Hz,Lf=200 μH,Cf=30 μF,输入电阻Rin= 0.2 Ω;
输出负载1为三相异步感应电机简单模型:PN=4 kW,UN=380 V,fN=50 Hz,R1=1.79 Ω,L1=7 mH,IN=6.9 A,nN=1 430 r/min,K1=0.8;
输出负载2:R2=100 Ω,L2=30 mH,fout2=40 Hz,K2=0.6;
输出负载3:R3=100 Ω,L3=50 mH,fout3=20 Hz,K3=0.4;
调制频率:8 kHz.
仿真分为两个阶段:第一阶段t≤0.9 s,电机在电动运行指令下运行,输出功率为3 kW;第二阶段t>0.9 s,电机在发电运行指令下运行,负载功率为3 kW.
仿真结果如图7所示.
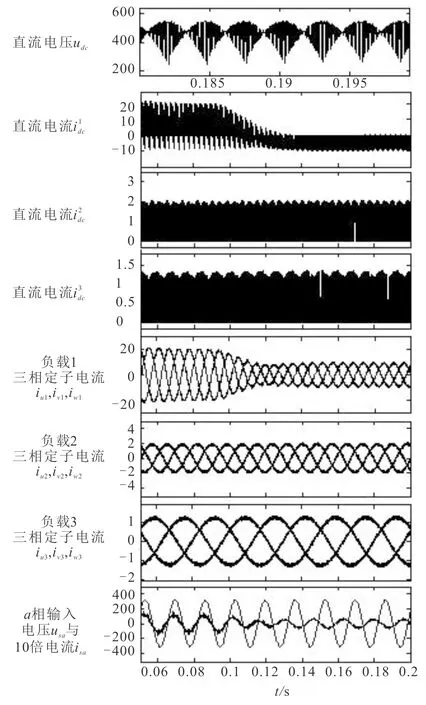
图7 多驱动变频调速系统的仿真结果
仿真结果分析:

(2)由于电机损耗,发电运行状态时的电机定子电流小于电动运行状态时的定子电流.
(3)在电动运行时,a相输入功率因数接近于1;在发电的运行过程中,a相的输入功率因数接近于-1,但是由于有滤波电容的作用,所以使输入电流的相位略超前于输入的电压.
5 结论
本文研究了一种多驱动变频调速系统的控制策略和换流策略,仿真实验验证了理论分析结果,可得到以下基本结论:
(1)PWM整流控制和输出电压空间矢量的逆变控制可以应用于多驱动系统调速系统.
(2)零电流换流策略可以解决输入侧的换流问题.
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
测控技术(2018年9期)2018-11-25 07:44:22
电子制作(2016年1期)2016-11-07 08:43:01
设备管理与维修(2016年7期)2016-04-23 06:51:55
通信电源技术(2016年5期)2016-03-22 01:09:45
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电测与仪表(2014年14期)2014-04-04 11:53:38
电测与仪表(2014年14期)2014-04-04 11:53:30
自动化博览(2014年4期)2014-02-28 22:31:12