
基于虚拟样机的步进装置分析改进与动力学建模
2021-12-21 10:24:32王佳睿张德强
辽宁工业大学学报(自然科学版) 2021年6期
王佳睿,张德强,李 煜
基于虚拟样机的步进装置分析改进与动力学建模
王佳睿,张德强,李 煜
(辽宁工业大学 机械工程与自动化学院,辽宁 锦州 121001)
针对DPH-260泡罩包装机夹持步进装置的PVC拉扯变形问题,基于Solidworks建模并利用ANSYS和ADAMS软件分别建立了改进前后夹持步进装置的虚拟样机及进行动力学仿真分析,得出PVC拉扯变形现象的原因并将改进前后仿真结果对比。针对改进后同步带传动机构传统动力学建模的局限性,将同步带离散为由Kelvin-Voigt单元柔性连接的质量块。最终对比了改进前后步进装置的运动曲线,通过理论分析建立了同步带传动机构动力学方程,为包装机步进装置的应用提供了理论参考。
泡罩包装机;虚拟样机;动力学仿真;离散模型
DPH-260辊筒式泡罩包装机广泛应用于药品包装生产过程之中,但包装机步进装置仍存在运动不稳定这一缺陷[1],这会导致加热后的PVC产生拉扯变形现象。针对此问题,利用Solidworks、ANSYS和ADAMS分别对改进前后步进装置的虚拟样机建模并进行动力学仿真。
首先,根据改进前步进装置的传动原理和ANSYS动力学的仿真结果,分析出PVC拉扯变形的主要原因:弹簧刚度不足导致曲柄复位时产生较大偏差,这一偏差使得曲柄转角过大,从而引起步进装置运动的不稳定。故针对此问题将步进装置中的曲柄滑块式步进机构改为同步带直线传动机构。其次,针对同步带是柔性体这一特点,利用ADAMS建立了同步带传动机构的虚拟样机并进行动力学仿真并对比改进前后的运动曲线。最后,针对同步带传动机构传统动力学建模的局限性,将同步带离散为Kelvin-Voigt单元模型进行理论分析,为包装机步进装置同步带传动机构的动力学模型和仿真奠定了理论基础。
1 PVC经夹持步进后产生变形的原因分析
1.1 夹持步进装置的工作原理
夹持步进装置由夹持装置与步进装置构成,依靠气缸夹持PVC协助步进。通过曲柄带动摆杆实现左、右PVC夹持滑座的同步运动,右夹持负责将PVC片送至加热成型装置中进行加热成型工作,左夹持则负责将成型好的PVC片拉出。
气缸的夹紧方式采用下夹持,即气缸夹持PVC片两侧,图1所示为夹持步进装置结构示意图。
1.2 PVC经夹持步进产生的变形现象及原因分析
1.2.1 变形现象
DPH-260泡罩包装机在正常工作时,影响包装质量的故障多出现在PVC夹持步进部分。左右夹持步进机构通过拉轴一起同步运动,PVC片经加热后,延展性增强,在夹持步进装置拉扯后,更易发生形变,导致每板的距离变长,直接影响泡罩包装机的产量完成指标和备件消耗指标,同时增加了PVC卷的消耗,降低了设备有效作业率。

1.摆杆;2.曲柄;3.PVC卡板;4.气缸座板;5.滑动轴;6.PVC滑板;7.拉轴;8.PVC夹持滑座
1.2.2 产生变形现象原因分析
根据步进装置的传动原理:步进装置的传动主要依靠曲柄[2],曲柄由凸轮带动,凸轮转动推动滚轮,使拉杆摆动,拉动链条使链轮转过一个角度,从而使曲柄转动实现一个步进距离,而曲柄的复位靠弹簧的拉力拉动链条,使链轮反方向转过一个角度,从而使夹持卡板回到原来位置。根据夹持步进装置的传动原理并结合曲柄滑块式步进机构的运动特性,考虑PVC拉扯变形现象产生的原因是弹簧刚度不足导致曲柄复位产生较大偏差,从而导致曲柄转角过大,引起步进装置运动的不稳定,图2所示为步进装置传动示意图。
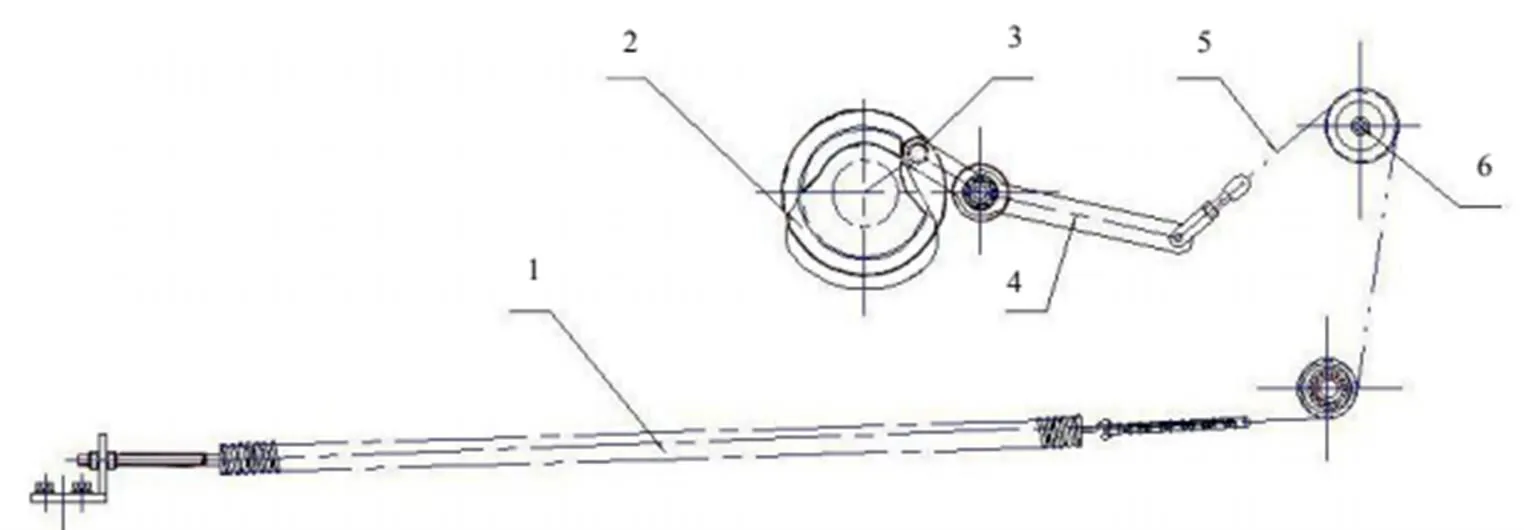
1.弹簧;2.凸轮;3.滚轮;4.拉杆;5.链条;6.链轮
1.2.3 基于Ansys Workbench的动力学仿真分析
基于Solidworks建模并与Ansys Workbench进行关联,利用Rigid Dynamics模块仿真模拟弹簧刚度不足时步进装置的运动情况,图3所示为Ansys Workbench动力学仿真模型。
按实际工作情况进行仿真参数设定,仿真时间0.61 s,仿真步长0.02 s,曲柄施加转矩=2.446 N·m。由于PVC随夹持卡板同步运动,故将仿真对象设置为夹持卡板,表1所示为夹持卡板部分时况速度、加速度数据,由于数据较多,故在此仅列出部分时刻的速度、加速度值。将所有数据采集后,通过Excel绘图功能表示出PVC夹持卡板速度、加速度曲线图,图4所示为夹持步进装置速度、加速度曲线图。
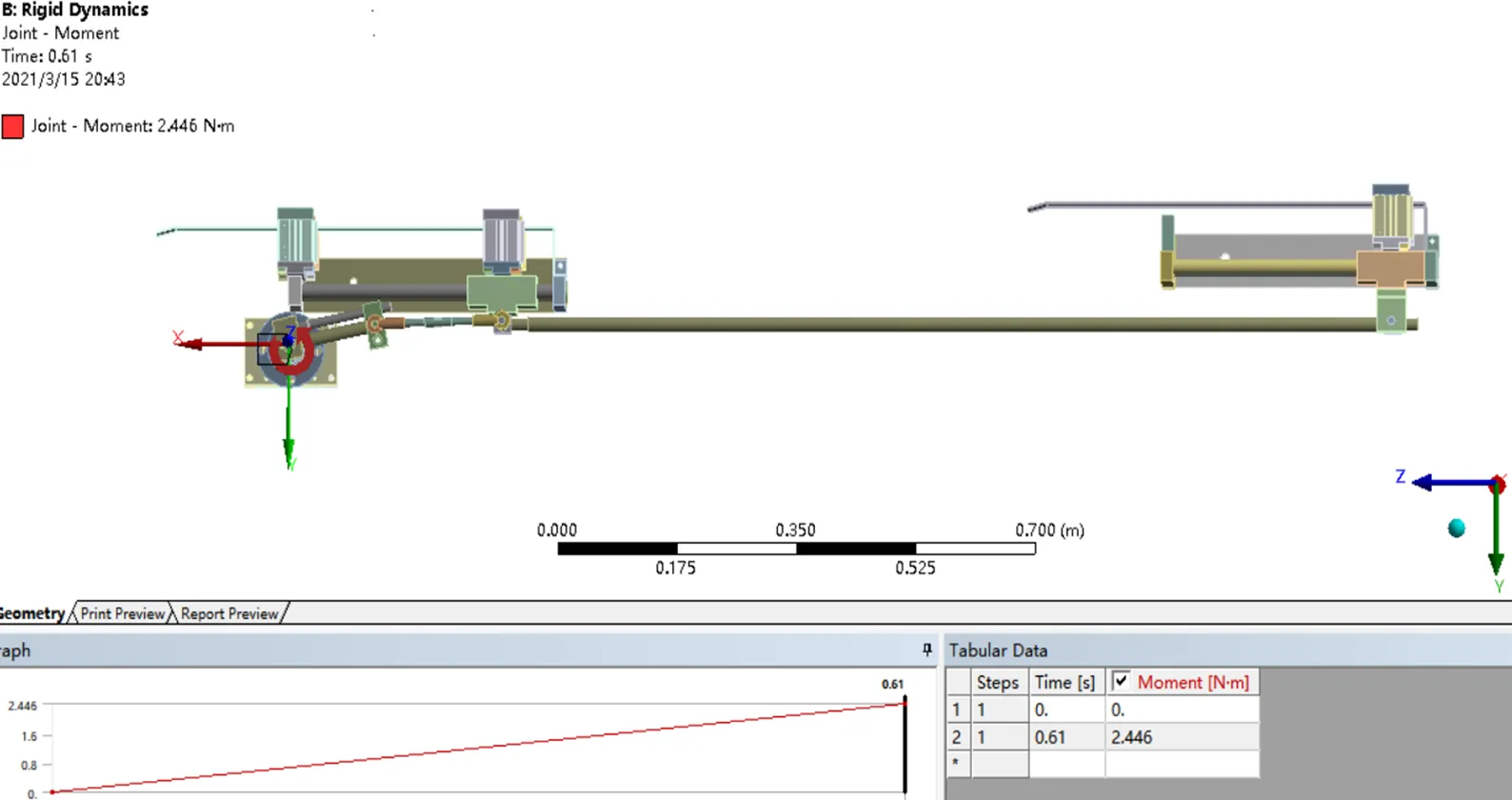
图3 Ansys Workbench动力学仿真模型
表1 部分时况速度、加速度值
时间/s速度/(m·s-1)加速度/(m·s-2)时间/s速度/(m·s-1)加速度/(m·s-2) 0000.390.350.60 0.05-0.081-0.470.440.380.61 0.150.172.590.540.390.62 0.20.250.820.590.400.65 0.260.280.680.610.410.66

图4 夹持步进装置速度、加速度曲线图
由图4可见:在0~0.1 s这一时间段内,速度曲线出现速度为负的返程现象,结合曲柄滑块式步进装置的传动原理和ANSYS动力学仿真结果进行分析得出:返程现象的产生是由于弹簧刚度不足使曲柄不能与摆杆共线,从而导致在下一次步进运动时曲柄转角过大引起滑座返程现象的发生;在0.1~0.2 s时间段内,加速速度出现波峰。
由于PVC经加热后热塑性增加,故曲柄滑块式步进机构导致的运动不平稳性会加剧PVC拉扯变形现象的发生。
2 改进方案
2.1 改进方案的选定
2.1.1 曲柄滑块式步进机构的改进方案
由于PVC夹持步进装置需要往复运动,故考虑将步进机构改为滚珠丝杠传动或同步带传动,由于同步带传动精度高、价格低廉,故选用同步带传动。以伺服电机为动力源与带动同步带配合的滑座,实现了步进装置的简化[3],图5所示为改进后夹持步进装置结构示意图。
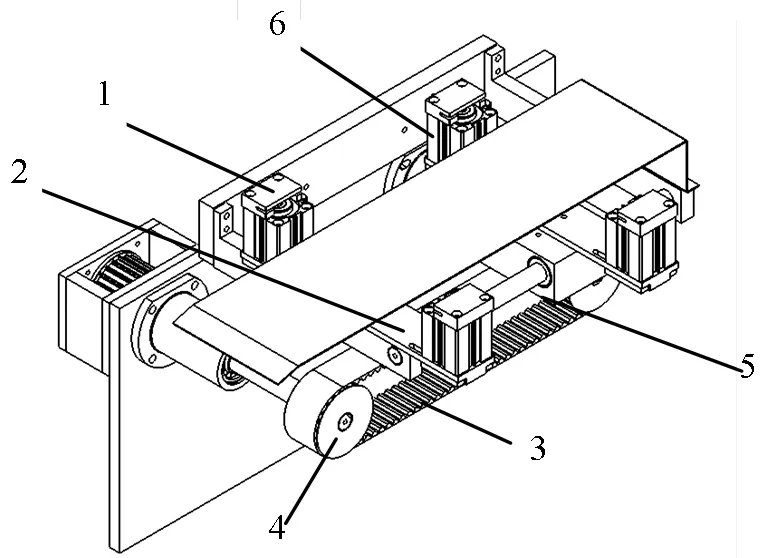
1.夹持卡板;2.气缸板座;3.齿形带;4.齿形带轮;5.齿形安装板;6.气缸
3 同步带传动机构的离散化建模与ADAMS虚拟样机的动力学仿真
因为同步带在系统传动过程中会发生多种变形,既有大的平动和转动,又有弹性变形的特点,而同步带的传统建模法仅是将同步带等效为轴与弹簧的连接[4-5],忽略了各带元之间的相互影响,因此,针对传统动力学建模法的局限性,将同步带离散为Kelvin-Voigt单元模型进行动力学建模,并基于ADAMS虚拟样机进行动力学仿真,以验证步进装置的改进效果。
3.1 同步带传动机构离散化动力学建模
由同步带是柔性体这一特点,故采用刚性有限元法对同步带进行建模,将同步带离散为个由Kelvin-Voigt模型连接的质量块,从而实现了柔性同步带的离散化建模。
图6所示为同步带离散化模型[6]。同步带传动机构处于步进状态时,由于负载滑座通过齿形安装板与同步带配合,故同步带在实际传动过程中外力和载荷的方向为切向。由图6可见:m、K、X、F、F´分别为各离散单元的质量、刚度系数、质心位置、驱动力、阻力。
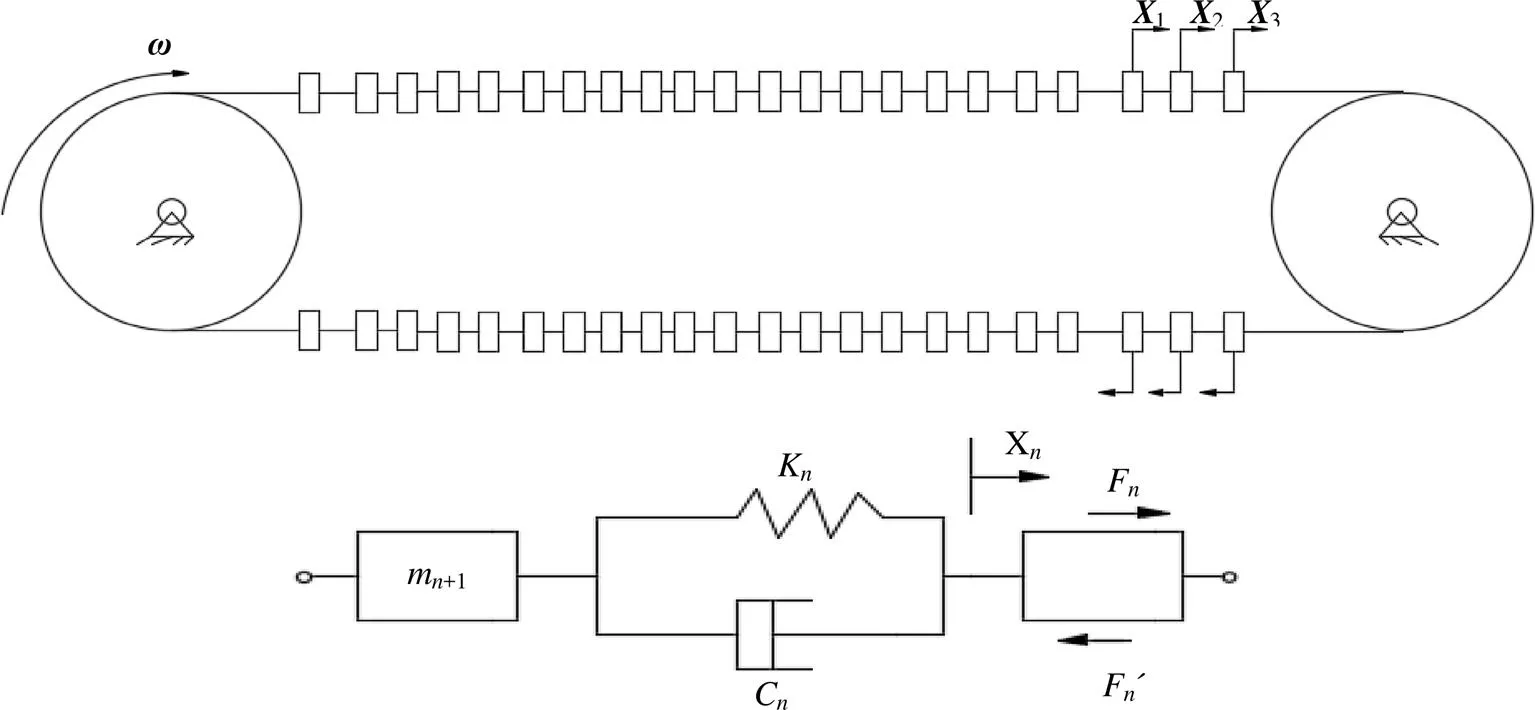
图6 同步带离散化模型
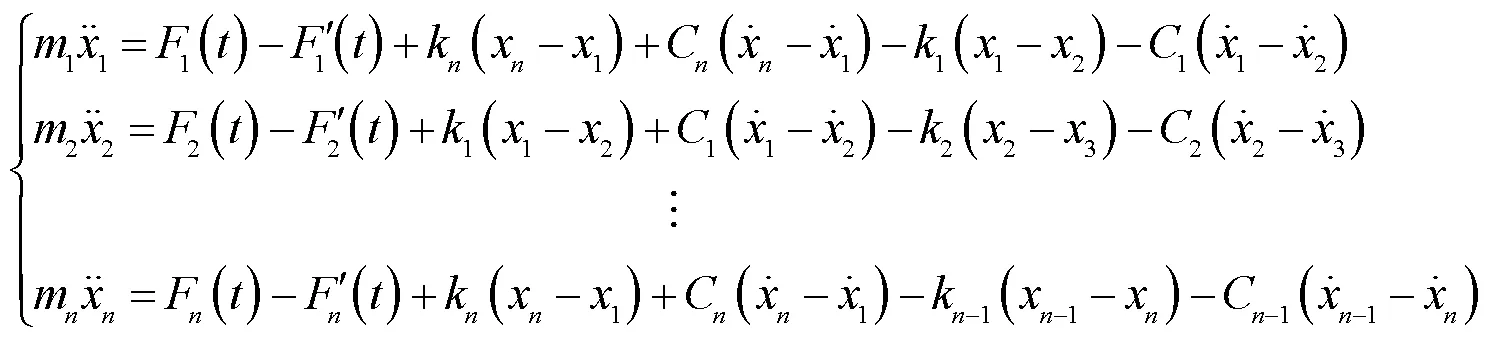
3.1.1 同步带离散化动力学方程
将同步带离散化,列出各质量单元的力平衡方程组,如式(1)所示;整理式(1)可得式(2)。
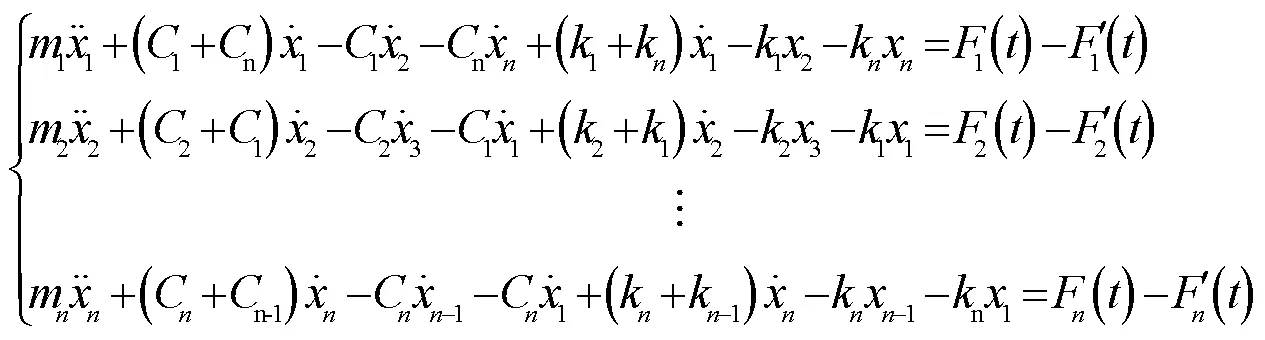
将式(2)用式(3)所示矩阵形式表示。

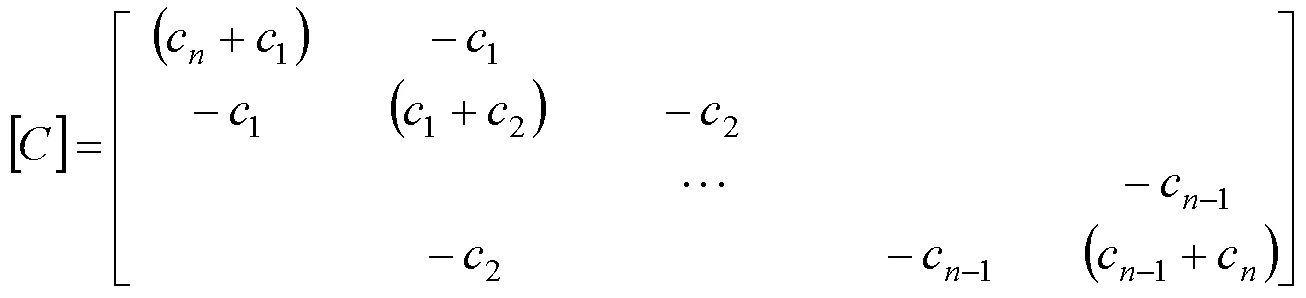

Kelvin-Voigt模型的参数测定法可求得阻尼系数和弹簧刚度矩阵各参数[7],由公式(3)可求得在同步带离散化后,各单元在步进装置同步带传动机构任意时刻的位移、速度及加速度。
3.2 基于ADAMS同步带传动机构虚拟样机的动力学仿真
由于同步带传动仿真属于刚柔耦合仿真,故同步带传动机构模型不便用Solidworks直接导入,在此利用ADAMS自带的同步带模型包Machinery-Belt进行建模,为提高计算机求解速度,将同步带步传动机构简化,将滑座与同步带齿形安装板配合以等效原来的滑座-导向轴-齿形安装板-同步带传动,滑座与导向轴之间的摩擦力直接施加在滑座上。
表2所示为同步带接触碰撞及摩擦参数:其中、、f、f分别为弹性刚度、接触阻尼系数、动、静摩擦系数,图7所示为简化后同步带传动机构的ADAMS虚拟样机。
3.3 基于ADAMS的动力学仿真分析

表2 同步带接触碰撞及摩擦参数
模型k/(N·mm-1)c/(N·s·mm-1)fdfs 带-带轮1×1040.10.50.67

图7 简化后同步带传动机构的ADAMS虚拟样机
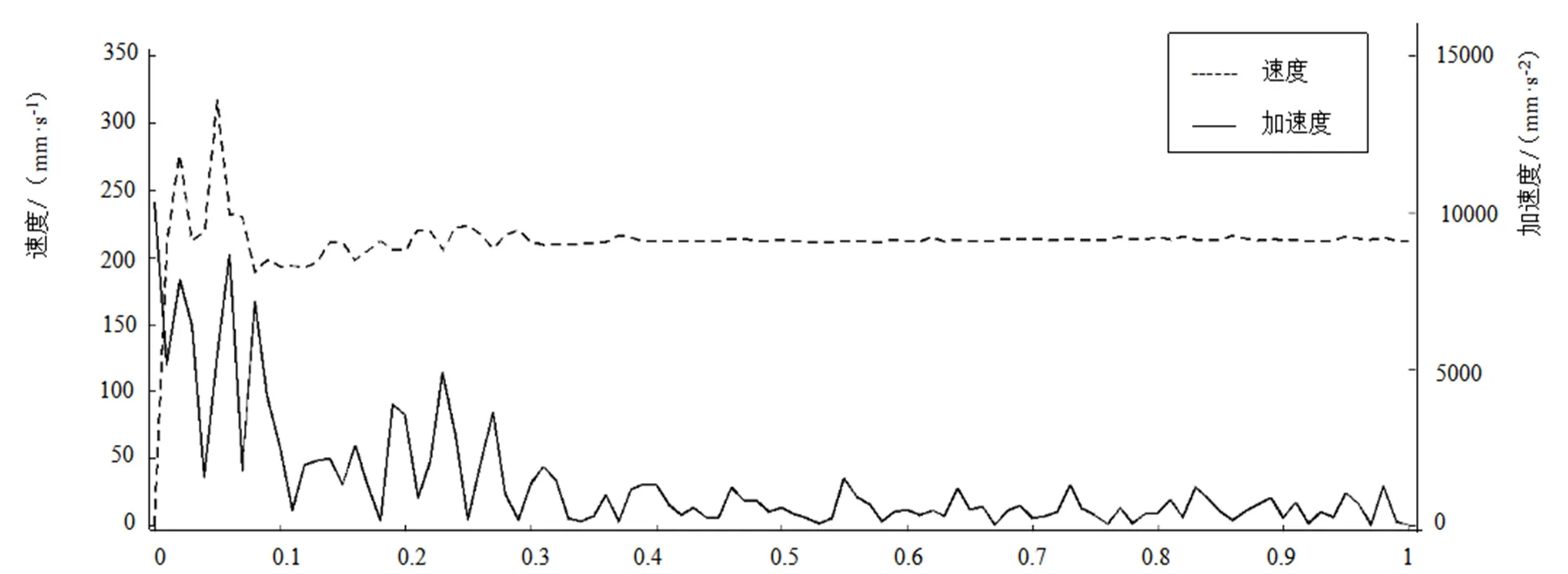
图8 同步带传动机构速度、加速度曲线图
由图8可见,在同步带传动机构运行初始阶段,速度、加速度曲线有较大波动,这是由于带的张紧力在主动轮启动时瞬间达到极值[8],随着从动轮的转动,带的张紧力减小并趋于稳定,负载滑块的运动也趋于平稳,由于带轮与同步带之间相互啮合的轮齿面积随时间不断变换,故速度、加速度曲线在一定值的上下范围波动。
3.4 步进装置改进前后运动分析对比
通过对比图4与图8中的速度、加速度曲线可知,改进后的步进装置在0~0.1 s这一时间段内,速度曲线不会出现速度为负的返程现象发生,尽管在0~0.1 s内速度、加速度值有较大波动,但0.1 s过后运动曲线趋于平稳,经分析这是同步带传动的正常现象,且与实际情况相吻合。
4 实际生产效果验证
通过对DPH-260辊筒式泡罩包装机夹持步进装置的改进并不断调试,最终改进后的同步带夹持步进装置运行平稳,PVC片不会出现因加热后,因热塑性增强导致的拉扯变形问题,废品率相对以前明显降低,包装效率可达到280~360板/分,图9所示为改进前后夹持步进装置实物图。

图9 改进前后夹持步进装置实物图
5 结论
基于ANSYS和ADAMS虚拟样机分别对改进前后的夹持步进装置进行动力学仿真分析,仿真结果显示,改进后的夹持步进装置速度、加速度曲线趋于平稳,0~0.1s内速度为负的回程现象消失。
针对改进后同步带传动机构传统动力学建模的局限性,将同步带离散为由Kelvin-Voigt单元柔性连接的质量块,通过理论分析建立了同步带传动机构动力学方程,为包装机步进装置同步带传动机构的动力学模型和仿真奠定理论基础。
[1] 宋丽佳. 浅析药品包装材料对药品质量的影响[J]. 黑龙江科技信息, 2016(4):3.
[2] 张锡玉, 刘建波. 曲柄摇杆式翻板机的仿真设计及改进[J]. 一重技术, 2009(2): 9-11.
[3] 刘雄心. 泡罩包装机械中的步进装置[J]. 包装与食品机械, 2016(2): 40-43.
[4] 严璐, 张爱军. 模拟同步带的半实物仿真测试研究[J]. 国外电子测量技术, 2017(9): 40-44.
[5] 赵秀文, 赵玉梅,李明. 同步带传动的研究[J]. 吉林工学院学报, 1996(17): 50-54.
[6] 滕红华. 基于有限元方法的胶带输送机动态设计研究[J]. 武汉工业学院学报, 2002(4): 36-38, 42.
[7] 陆兴华. 带式输送机系统离散动态模型[J]. 煤矿机械, 2009, 30(2): 56-59.
[8] 马志平, 葛正浩, 姚正凯. 同步带传动的虚拟样机建模与动态性能研究[J]. 机械传动, 2013(3): 31-33.
Analysis Improvement and Dynamic Modeling of Stepping Device Based on Virtual Prototype
WANG Jia-rui, ZHANG De-qiang, LI Yu
(College of Mechanical Engineering and Automation, Liaoning University of Technology, Jinzhou 121001, China)
In view of the PVC pulling deformation problem of the clamping stepping device of DPH-260 blister packaging machine, based on Solidworks modeling, ANSYS and ADAMS software used, the virtual prototype of the improved front and rear clamping stepping device was established and the dynamic simulation was carried out. The reasons for the PVC pulling deformation phenomenon were obtained and the simulation results before and after the improvement were compared. Considering the limitation of traditional dynamic modeling of the improved synchronous belt transmission mechanism, the synchronous belt is discretized into mass blocks flexibly connected by Kelvin-Voigt element. Finally, the movement curves of the stepping device before and after the improvement were compared, and the dynamic equation of the synchronous belt transmission mechanism was established through theoretical analysis, which provided a theoretical reference for the application of the stepping device of the packaging machine.
blister packaging machine; virtual prototype; dynamic simulation; discrete model
10.15916/j.issn1674-3261.2021.06.005
TB486
A
1674-3261(2021)06-0373-06
2021-03-06
辽宁省科技厅2018年重点研发计划指导项目(2018106005)
王佳睿(1997-),男,山东滨州人,硕士生。
张德强(1964-),男,河北石家庄人,教授,硕士。
责任编辑:陈 明
猜你喜欢
粮食加工(2022年6期)2022-12-02 09:07:56
中国特种设备安全(2022年4期)2022-07-08 02:42:40
长春大学学报(2021年4期)2021-05-17 08:38:56
机械工程师(2021年4期)2021-04-19 07:27:56
装备制造技术(2020年4期)2020-12-25 05:26:04
设备管理与维修(2019年22期)2019-12-19 01:30:12
机械研究与应用(2018年5期)2018-11-05 05:59:38
制造技术与机床(2017年3期)2017-06-23 08:11:32
时代农机(2016年6期)2016-12-01 04:07:20
环境科技(2015年4期)2015-11-08 11:10:40
