
月面无人自主采样返回任务动力下降点确定及验证
2021-12-21 09:09:58赵洋盛瑞卿陈春亮张晓文邹乐洋高珊黄昊
中国空间科学技术 2021年6期
赵洋,盛瑞卿,陈春亮,张晓文,邹乐洋,高珊,黄昊
1. 北京空间飞行器总体设计部,北京 100094 2. 北京控制工程研究所,北京 100094
1 引言
嫦娥五号探测器成功实现了月面无人自主采样返回任务。作为保证月面采样的前提,执行月面软着陆是整个任务中极为重要的环节。这一过程从近月点附近的动力下降点开始,负责执行软着陆的探测器通过减速制动发动机点火,经过主减速、快速调整、接近、悬停避障等阶段,直至着陆月面既定区域内[1]。在着陆过程中需要根据导航敏感器实时测量探测器距离月面的高度、速度并按照制导控制律对探测器进行控制,最终保证探测器在指定目标范围内着陆。
动力下降点作为整个月面软着陆过程的“起始点”,也是地面轨道控制与探测器自主执行导航、制导与控制的关键“交班点”,其设计结果直接影响了最终着陆点的位置和着陆过程的着陆安全,也间接影响采样安全和采样工程目标的实现结果。而动力下降点的确定也是多系统间交互迭代的过程,涉及任务轨道设计、着陆目标的采样区确定、着陆过程安全分析、采样区地形地貌分析等环节。
针对在月面预定位置实现软着陆的问题,众多文献分别从轨道设计、最优标称制导轨迹设计、月面采样点确定、着陆安全区域搜索等方面进行了研究,其中文献[2]提出了在月面目标着陆点实施精确软着陆的燃耗最优标称制导轨迹设计方法;文献[3]针对月面定点着陆任务需求,设计了环月非对称降轨控制策略;文献[4]针对定时定点月面着陆的目标要求,提出了全程轨道控制设计方法;文献[5]提出了月面复杂地形表层采样可采点确定方法;文献[6]提出了在月球软着陆过程中识别障碍物,并利用高程图寻找安全着陆点的软着陆算法。国内外相关文献主要针对月面着陆关键要素进行了独立的设计优化工作。而如何通过多次联合调整轨道和着陆过程最优制导航迹,并在这个过程中综合考虑月面采样需求、着陆区安全,确保月面着陆及起飞动作顺利完成,是月面无人自主采样返回这类存在多任务阶段、复杂飞行过程、高精度轨道控制要求等特点的复杂深空探测任务亟需解决的问题。
本文根据嫦娥五号月面无人自主采样返回任务月面采样区定点着陆的任务需求,结合环月段轨道精确控制策略的设计结果,在综合月面软着陆、月面采样及起飞安全的需求,提出了在环月轨道基于“逐次逼近寻优”方法的月面软着陆过程动力下降点确定方法,即在动力下降前通过多次轨道控制与最优标称制导轨迹搜索联合控制策略的调整方法以确保着陆在月面目标落点,同时兼顾月面着陆、月面采样和月面起飞过程安全性,并依据该方法设计了具体实施流程。本文所介绍的“逐次逼近寻优”方法确定月面软着陆的动力下降点已经在嫦娥五号任务上得到了成功验证,对探测器实施月面着陆起到了重要的决定作用,所使用的方法对于复杂的地外天体着陆探测任务具有充分借鉴性。
2 月面无人自主采样返回任务过程
嫦娥五号月面无人自主采样返回任务整个飞行过程主要包括:发射入轨段、地月转移段、近月制动段、环月飞行段、着陆下降段、月面工作段、月面上升段、交会对接与样品转移段、环月等待段、月地转移段、再入回收段共11个阶段,如图 1所示,整个飞行过程持续23 d。
根据飞行过程设计,在实施月面动力下降软着陆前,探测器需要经过为期2 d的环月轨道飞行过程,该阶段从探测器完成近月制动后开始,着陆器-上升器组合体与轨道器-返回器从200 km环月轨道经过两次降轨变轨后进入200 km×15 km的环月轨道,飞行至动力下降点,开始实施动力下降。在着陆上升组合体着陆月面后,在月面短时间(2 d)内完成月壤采样及封装工作,随后上升器携带月壤样品再从月面点火起飞,进入15 km×180 km环月轨道,完成后续交会对接任务,如图 2所示。

图1 嫦娥五号月面无人自主采样返回任务飞行过程示意Fig.1 Flight process of Chang’e-5 unmanned automatic sampling and return mission
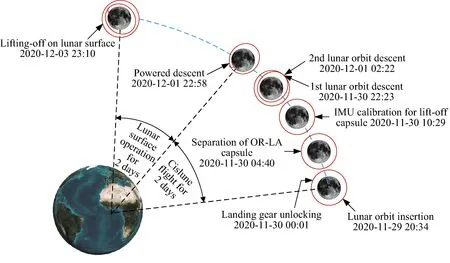
图2 嫦娥五号环月及月面工作飞行过程示意Fig.2 Flight process of cislune and lunar surface operation
对于实现月面软着陆的动力下降过程,则是在15 km×200 km环月轨道的近月点附近,通过发动机点火减速制动,由探测器自主控制至着陆在月面目标点。由于动力下降的轨控过程与探测器距月球表面实际高度密切相关,在动力下降过程中针对探测器高度变化,设计不同的导航敏感器使用策略[7],如图3所示。
其中,在距月面15~2 km的主减速段,主要采用捷联惯导平台实现自主惯性导航外推,在下降到12 km高度后,引入激光、微波测距敏感器对惯性导航信息进行修正,从而实现对高度测量误差的修正;在下降到4 km后,引入激光、微波测速敏感器作为动力下降过程速度测量新息,修正速度测量偏差;最后在距月面1.5 km的接近段和100 m悬停避障段,分别引入光学成像敏感器和激光三维成像敏感器,对目标着陆采样区的地形进行成像并检测障碍物(直径大于1 m的石块或坑),并确定安全着陆点。
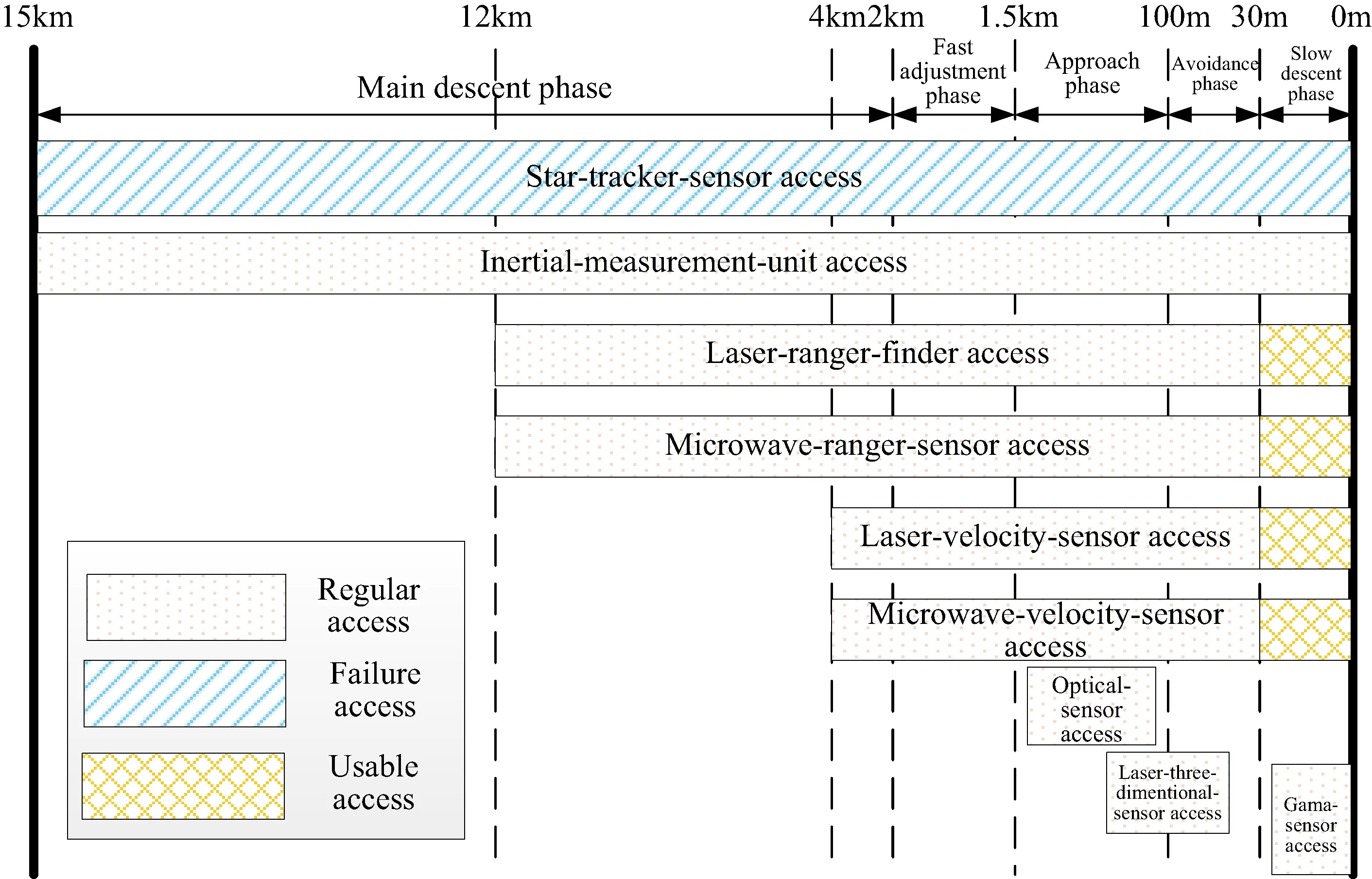
图3 嫦娥五号探测器着陆上升组合体动力下降过程敏感器使用情况示意图Fig.3 Navigation sensor utilization for powered descent phase of Chang’e-5 lunar exploration mission
3 动力下降点确定的原理及约束条件
3.1 动力下降点的确定原理
动力下降点,顾名思义为执行月面着陆探测器开始点火减速制动的位置,其确定原理如图 4所示。其中:A点为动力下降点、B点为动力下降点对应的器下点、C点为导航控制系统引入高度测量值时的点、D点为C点的器下点,E点为着陆月面的点。动力下降点A与此时月面器下点B(真实月面)间距离,即动力下降点相对于真实月面实际高度为H1;动力下降点A与此时月面器下点M(相对于月球平均海拔平面)间距离,即动力下降点轨道理论高度为H2;导航测距敏感器引入点C相对实际月面高度为H3;图中ND虚线为过D点相对月心的一段圆弧线,ND与动力下降点A→月心连线的交点为N。动力下降点A与该点的距离为H4。
动力下降点确定的主要内容是确定在相对月面既定高度处实施探测器的点火制动动作。而根据动力下降过程的导航策略设计结果,为保证燃耗最优,通常动力下降点安排在近月点附近,同时为了确保导航控制系统在引入高度测量敏感器(距月面约12 km)的实测信息时滤波快速收敛,要求捷联惯导平台的高度积分结果与高度测量敏感器测量结果尽量接近,即动力下降点高度基准以引入测距敏感器时对应的月面实际高度为相对基准,根据动力下降航迹确定引入测距敏感器时对应的实际月面高度。因此,通常设置:H3≈12 km,H4≈15 km。
3.2 动力下降点确定约束条件
根据3.1节动力下降点定义及与动力下降航迹的空间几何关系,可以分析出,与动力下降点需要确定的参数包括:
1)动力下降点轨道参数,主要包括动力下降点位置、速度以及轨道倾角等;
2)动力下降发动机点火前探测器初始质量;
3)动力下降过程用于减速制动的主发动机推力及比冲。
同时,在动力下降点确定过程中,还需要结合嫦娥五号月面无人自主采样任务的设计特点,综合考虑月面采样区地形地貌特点以及月面着陆位置及姿态对后续动作,包括:月面采样工作、月面起飞上升等关键环节的影响。

图4 月面软着陆动力下降航迹示意图Fig.4 Flight track of powered descent on lunar soft landing
主要包括以下几个方面:
(1)动力下降航迹过程的安全性
主要涉及探测器器下点地形地貌对于导航敏感器的影响,包括两个方面:
1) 动力下降航迹覆盖范围对应的月面高程变化,主要影响的是微波和激光测距敏感器,若高程起伏变化较大,则不利于导航敏感器滤波收敛,同时也会影响测距信号有效性判断,造成虚警。
2) 接近段航迹覆盖范围对应的月面地形地貌,主要影响的是光学成像敏感器和激光三维成像敏感器选择月面安全着陆点的判断输出,若月面坡度较大、石块、撞击坑分布密度较高,会影响着陆安全。
(2)月面着陆及月面起飞的安全性
主要涉及目标着陆点地形地貌对于探测器的触地安全影响和间接对月面点火起飞的安全影响。由于目标着陆点的月面坡度直接影响着陆姿态,若着陆姿态偏差过大,会导致探测器倾翻。而同时考虑完成月面采样任务后,从月面稳定起飞上升,要求着陆姿态偏差在一定范围内。
(3)月面采样过程的安全性
包括石块分布情况和月壤结构特性对月面钻取及表取采样过程的影响,若石块分布较多、月壤结构较为坚硬,则难以实施月面采样任务。
因此,需要综合考虑上述影响因素,在充分分析月面采样区地形地貌特点和动力下降过程安全性的前提条件下,结合全任务轨道设计结果和探测器质量特性、发动机工作特性等关键参数,实施动力下降点的确定与动力下降过程的仿真。
4 月面软着陆过程动力下降点确定方法
动力下降点确定基于逐次逼近寻优策略的设计,主要包括两方面:首先,在轨道设计上主要通过在近月制动及环月过程中,实施修正升交点赤经和轨道倾角的轨道面调整策略,以实现对落点经度的调整,而在环月降轨过程中主要瞄准动力下降点高度和落点纬度;同时,根据动力下降过程动力学模型,结合最优标称轨迹设计结果,对最终着陆点进行预测,并将着陆点位置、着陆速度的预测结果与目标着陆点参数进行比较,将计算偏差作为重新确定动力下降点参数(位置、速度、发动机点火时间)的迭代输入,重新引入到第一步的轨道调整策略中。即以月面着陆点为“目标”,经过环月轨道轨控策略(近月制动2次、环月降轨2次)“逐次逼近”迭代,确保按动力下降最优航迹估计的着陆点与目标着陆点“逐步接近”,最终将着陆点计算结果与理论目标的偏差缩小在阈值范围内,即实现“目标寻优”,上述过程具体实现如图 5所示。
具体包括以下几个步骤:
1)根据初始动力下降点参数,确定动力下降过程动力学模型。
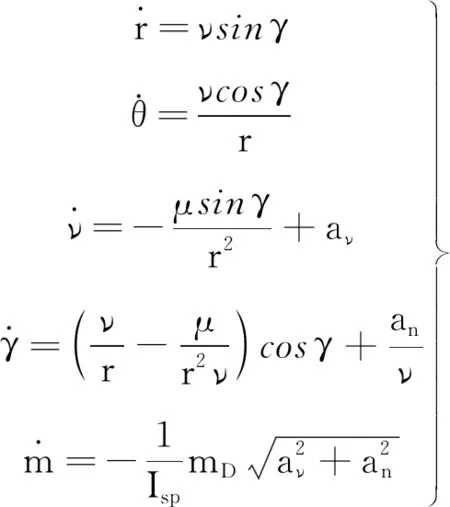
初始的动力下降点参数主要包括:在开始执行动力下降时刻TD时,探测器月心惯性系下位置PD=[XD,YD,ZD]、速度VD=[VxD,VyD,VzD]、轨道倾角iD、初始质量mD。其中,动力下降过程的动力学模型可以描述为[2]:
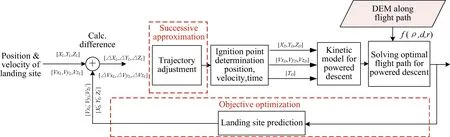
图5 基于逐次逼近寻优策略的动力下降点确定原理图Fig.5 Determination of ignition point for powered descent phase based on successive approximation and optimization
(1)
式中:r为任意位置探测器月心距;θ为月心-探测器矢量与月球自转轴矢量夹角;ν为探测器飞行速度;γ为动力下降过程飞行弹道平面倾角;μ为月球引力常数;通常取μ=4.902 79×1012m3/s2;av为探测器在轨飞行速度矢量切向加速度;an为飞行速度矢量法向加速度;Isp为探测器动力下降主发动机比冲;m为探测器动力下降过程的质量。
2)根据动力学模型,结合航迹下地形数据,计算分析着陆安全,迭代求解最优标称着陆航迹。
在给出上述动力下降点初始参数(位置、速度、发动机点火时间等)的输入后,可以根据动力下降过程的动力学模型,利用优化控制方法求解最优着陆航迹。
对于嫦娥五号月面无人自主采样返回任务,月面软着陆过程燃料消耗是最重要的设计因素,因此以动力下降过程燃料消耗最优轨迹作为期望轨迹进行迭代跟踪,即首先定义描述着陆过程燃耗性能指标函数[8]:
(2)

同时,考虑着陆安全问题,定义着陆器安全着陆判据为:f=(ρ,d,r),定义为:ρeven着陆区地形平均坡度;ρmax为着陆安全能容忍最大坡度,考虑月面着陆、采样及起飞任务安全,要求:在10 m基线(用于分析地形数据的单元尺寸,通常与地形数据分辨率密切相关,例如5 m分辨率的地形数据,通常取10 m,即两个像元作为基线)内,坡度(地形坡面与水平面的夹角)不超过8°;di定义为着陆区内撞击坑深度/直径比,dmax为着陆安全及任务要求能接受的最大撞击坑深度/直径比,按照任务要求,坑深度/直径比不超过0.1,i∈[1,Nc]为撞击坑数量;r定义为着陆区内石块丰度(石块分布面积占整个区域面积比),rmax为着陆安全及任务要求能接受的最大石块丰度,按照任务要求,石块丰度不超过1%,则有:
(3)
相应地,考虑着陆安全求解动力下降过程燃耗最优的着陆轨迹问题可以描述为:min J,即:
3)根据最优标称着陆航迹的设计结果,预测最终着陆点位置P'L=[X'L,Y'L,Z'L],速度V'L=[Vx'L,Vy'L,Vz'L]。
4) 根据最终着陆点预测结果,计算与目标着陆点的着陆点位置PL=[XL,YL,ZL]及着陆速度VL=[VxL,VyL,VzL]的偏差量ΔPL、ΔVL作为修正动力下降点参数的输入,其中:
5)根据步骤4计算的着陆点偏差,对当前轨道控制策略进行修正以调整目标着陆点,再以此递推重新确定动力下降点。
由于对月面无人采样返回任务,月面着陆点主要通过环月降轨控制调整月面落点纬度、通过引入近月制动法向速度增量调整月面落点经度。同时,通过优化地月转移瞄准的近月点倾角,保证采样点第二次穿过环月轨道面的时间,从而保证探测器月面起飞过程共面上升的测控条件[3][9-10]。
近月制动轨道调整策略:
环月降轨轨道调整策略:
式中:iLOI为近月制动后轨道倾角;ΔνLOIN为轨道调整的速度增量法向量;u为探测器的纬度幅角;ΔνLOIT为轨道调整的速度增量切向量;θLon为理论计算的着陆点经度;θLat为理论计算的着陆点纬度。
因此,嫦娥五号任务轨道调整策略设计了逐次逼近目标落点的方法,具体过程如图6所示。其中,分别通过近月制动轨控策略设计、环月降轨(两次)轨控策略设计,逐步“逼近”理论目标。
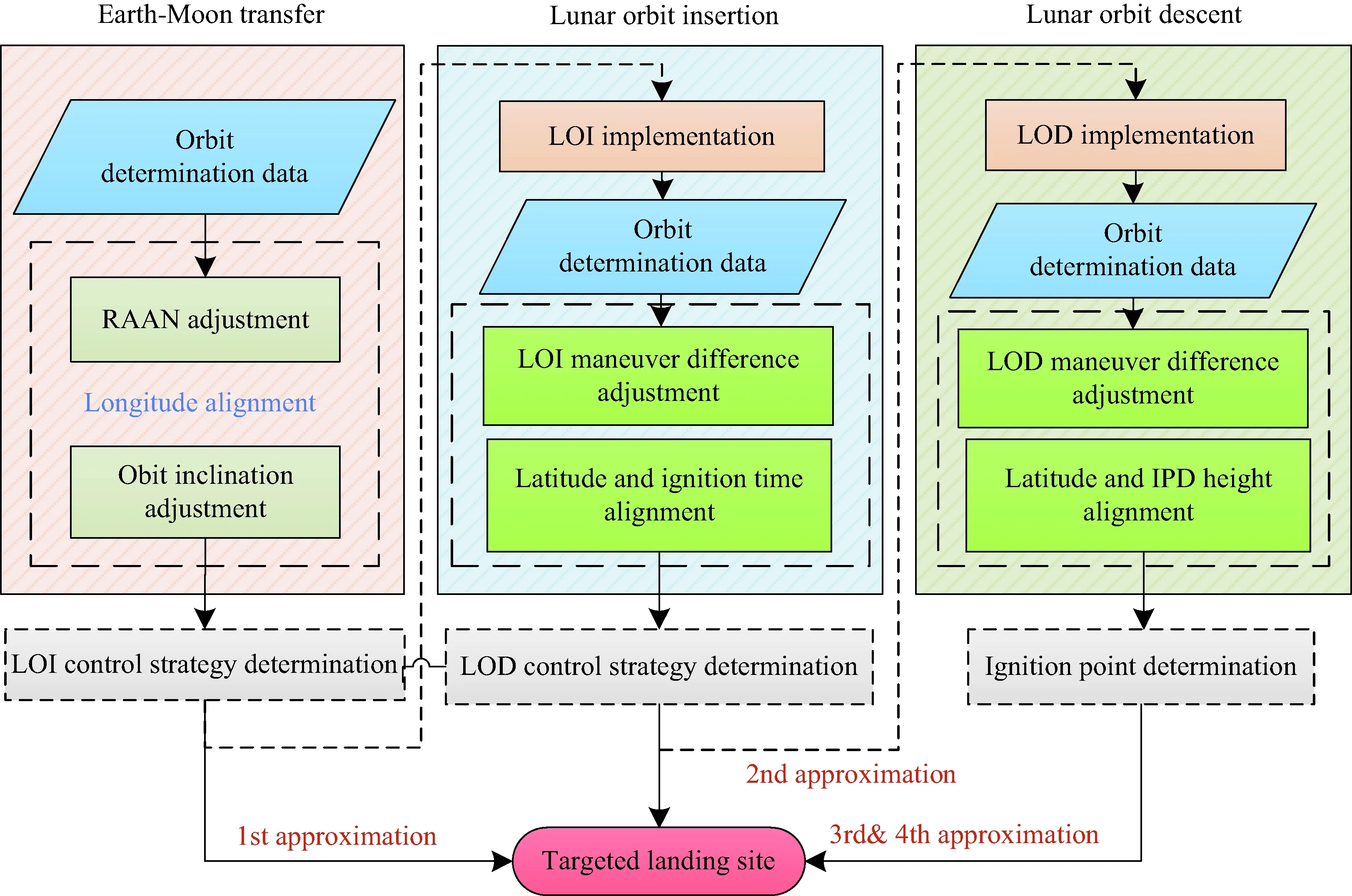
图6 修正轨控策略逐次逼近目标流程Fig.6 Flow chart of successive approximation of trajectory maneuver control strategy design
6)迭代计算步骤1~5,最终将着陆点计算结果与理论目标的偏差缩小在阈值范围内。
根据月面采样任务要求,理论预估落点与目标落点月心角偏差≤0.01°,同时,探测器与月面接触时水平速度不大于0.7 m/s,垂直速度不大于3.5 m/s,以上述条件作为动力下降点确定工作的收敛目标。
5 嫦娥五号月面软着陆动力下降点确定实施与验证结果
5.1 动力下降前轨道控制及动力下降点确定结果
按照嫦娥五号月面软着陆前的任务设计,在实施动力下降前,要经过近月制动、环月降轨等环节,每次轨控执行结果会对后续轨道控制策略设计结果产生影响。相应地,每次轨道控制策略的变化会对动力下降点的确定及着陆点的确定结果产生影响。
考虑月面软着陆任务动力下降过程实施前的轨道控制结果对动力下降点确定的影响以及月球引力摄动对不同时间轨道确定结果的影响。分别在月面软着陆前主要的四次轨控任务后实施动力下降初始点确定,即:2020年11月25日地月转移段四器组合体第二次中途修正后(TCM-2)、11月29日四器组合体近月制动后(LOI)、11月30日着上组合体第一次环月降轨后(LOD-1)和12月1日第二次环月降轨后动力下降前(LOI-2)。因此,不同轨道控制结果对应的动力下降点初始参数也不同,由于动力下降过程中并不具备轨道调节的能力,相应也会导致最终着陆点的结果发生变化。嫦娥五号月面无人自主采样返回任务软着陆前轨道控制结果对动力下降点确定结果的影响如表1所示。

表1 软着陆前轨道控制对动力下降点确定的影响
在不同轨控任务对应的动力下降点确定后的软着陆最优航迹仿真结果如图7所示。

图7 嫦娥五号在轨历次动力下降点确定后的航迹仿真结果Fig.7 Simulation results of flight tracks with multiple ignition point determination for powered descent phase
5.2 嫦娥五号着陆及起飞安全性分析结果
由于嫦娥五号确定的采样区位于月球正面风暴洋(Oceanus procellarum)区域,其纬度范围为43°±2°N,经度范围59°±10°W,如图8所示[11]。
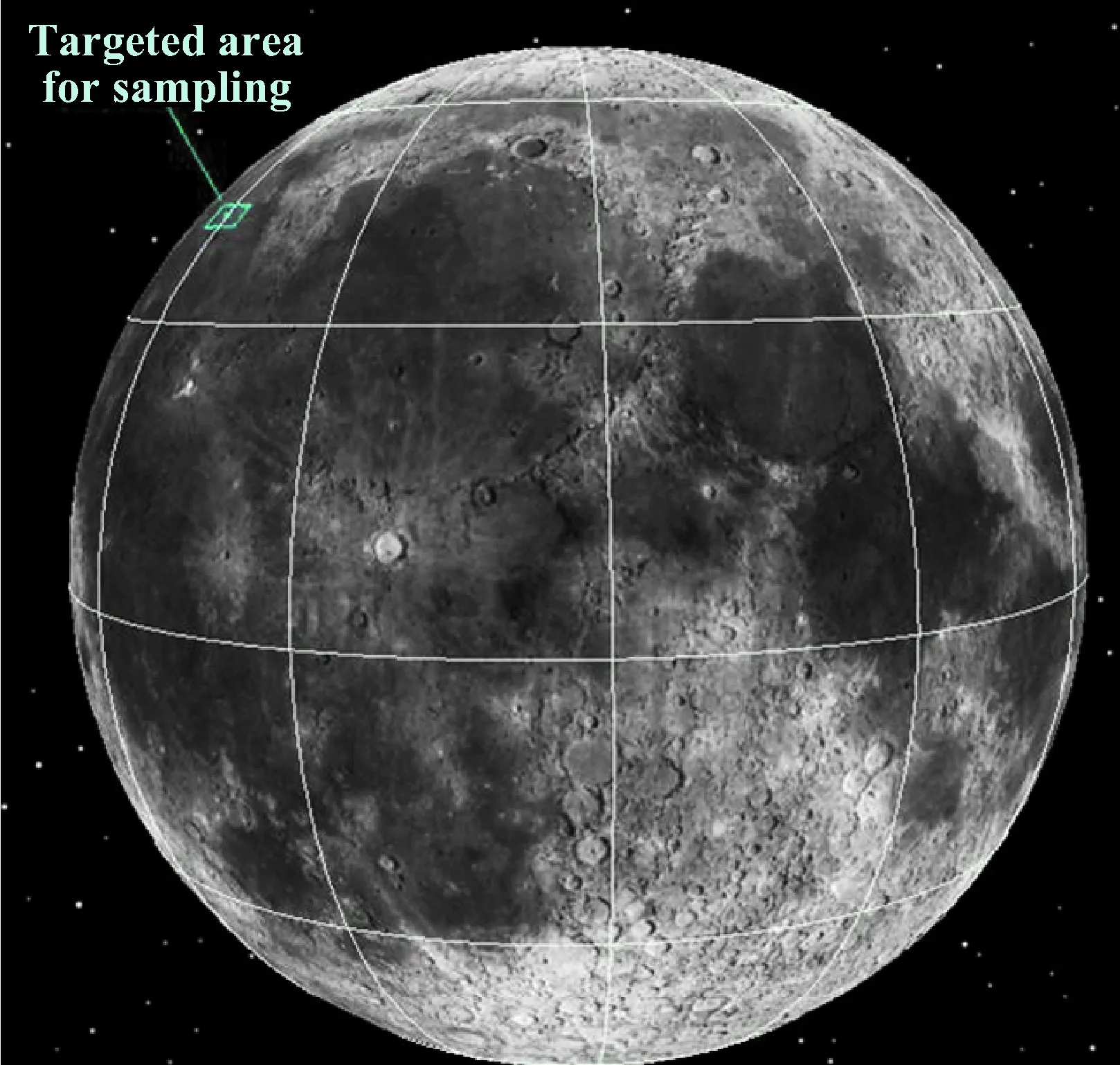
图8 嫦娥五号探测器月面采样区范围示意Fig.8 Targeted area for sampling of Chang’e-5 lunar probe
根据对嫦娥五号采样区数字地形数据的分析结果[12],该区域平均月面(距月心1 737.4 km)的地形高程范围为-3 377 m~-1 725 m,平均高程为-2 451.91 m。平均坡度为2.73°,整体地势较为平坦。整个采样区撞击坑分布情况为西部稀疏,撞击坑坑壁平均坡度小于10°。整个采样区内石块呈现出“不均衡”的随机散布状态,并围绕撞击坑呈现出圆形发散的群状分布[13-14]。结合着陆安全概率计算方法[15],在采样区内筛选出适宜着陆的区域,如图9所示,其中蓝色区域能够满足本次着陆任务的安全区域。根据分析结果,采样区内超过95%的区域都能够满足着陆安全性要求,这与采样区地形的分析结果也是一致的。
根据5.1节中动力下降点确定的最终结果,同时考虑不同初始参数(如轨道确定偏差、轨控偏差、主减速发动机推力偏差等)对最终落点的影响,最终确定的着陆区范围约为26 km×6 km。如图10中红色框区域所示,该区域具体范围如表2所示。
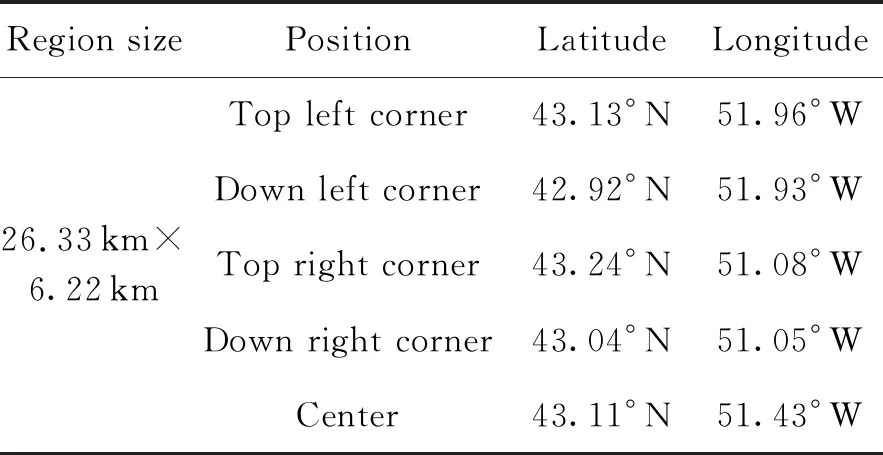
表2 动力下降点确定的目标着陆区范围
同时结合最优着陆航迹、月面起飞航迹分析了航迹覆盖范围的月面地形及高程等关键参数,分析了月面着陆及月面起飞过程的安全性,分别如图9、图10所示,分析结果表明航迹所确定的区域地形能够满足着陆及起飞任务安全实施,可以采用。

图9 嫦娥五号动力下降航迹着陆安全性分析结果Fig.9 Safety analysis result along powered descent flight track
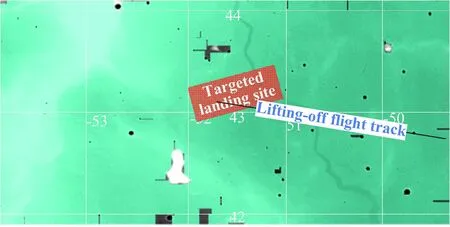
图10 嫦娥五号起飞航迹着陆安全性分析结果Fig.10 Safety analysis result along lunar surface lifting-off flight track
5.3 嫦娥五号月面软着陆实现结果
嫦娥五号月球探测器着陆上升组合体按照既定任务设计,于2020年12月1日22:57:17发动机开机,从动力下降点37.37° N ,76.86° W开始实施动力下降,经过了961 s的飞行,依次经过主减速段、快速调整段、接近段、悬停段、避障段、缓速下降段控制,最终于23:11:21安全着陆在既定采样区内,着陆点位置为43.1° N,51.42° W,与动力下降前下降点确定的结果一致。而根据导航敏感器的遥测数据结果可以确定,着陆点附近的采样区地势平坦,着陆姿态偏差不超过2.2°,满足后续月面采样及起飞的任务需求。
动力下降过程航迹和月面起飞上升对应的器下点月面实际高程变化情况分别如图11、图12所示。在动力下降过程的航迹覆盖范围内,月面高程范围为-2 728.5~-1.738 1 km,月面起飞过程高程范围为-2 673.2~ -2 019.5 km,根据分析,航迹下月面地形能够满足着陆安全和月面起飞安全的要求。根据月面实际测量结果,动力下降点确定结果满足任务要求,所使用的动力下降点的确定方法通过了有效验证。

图11 嫦娥五号探测器动力下降过程航迹器下点月面高程变化情况Fig.11 Terrain elevation change along the flight track of powered descent phase of Chang’e -5 lunar probe

图12 嫦娥五号探测器月面起飞过程航迹器下点月面高程变化情况Fig.12 Terrain elevation change along the flight track of lunar surface lifting-off phase of Chang’e -5 lunar probe
6 结论
本文针对嫦娥五号月面无人自主采样返回任务设计特点,综合月面软着陆、月面采样及起飞安全的需求,提出了在环月轨道基于“逐次逼近寻优方法”的月面软着陆环节动力下降点的确定方法。在动力下降前通过多次轨道控制与最优标称制导轨迹搜索联合控制策略的调整方法确保了月面着陆,同时对月面着陆、月面采样和月面起飞过程的安全性进行了确定。嫦娥五号任务进入环月轨道后,按照“逐次逼近寻优方法”在轨共实施了4次策略调整工作并确定了最后的下降点参数,最终在既定的动力下降点成功实施了月面软着陆任务。本文提出的方法及设计的在轨实施流程经过了有效验证,对于后续地外天体软着陆任务,特别是地外天体表面采样、起飞上升任务的轨控策略设计及软着陆任务设计均具有借鉴意义。
猜你喜欢
英语世界(2022年5期)2022-05-18 12:14:16
空间科学学报(2021年2期)2021-07-21 08:43:38
上海航天(2020年6期)2021-01-18 04:50:12
北京航空航天大学学报(2020年1期)2020-02-11 08:15:04
环球时报(2018-12-13)2018-12-13 04:22:37
深空探测学报(2016年4期)2017-01-18 06:15:03
载人航天(2016年4期)2016-12-01 06:56:13
太空探索(2015年1期)2015-07-18 11:02:13
太空探索(2014年12期)2014-07-12 15:17:12
太空探索(2014年11期)2014-07-12 15:17:00
