
基于机载LiDAR数据的电力线建模方法研究
2021-12-17 05:24:56宋袁龙彭桂辉
中国煤炭地质 2021年11期
宋袁龙,彭桂辉
(中煤航测遥感局技术发展研究院,西安 710100)
0 引言
机载激光雷达(LiDAR)可以快速获取高精度、高密度的地球表面及地物三维坐标信息。随着轻小型机载LiDAR硬件技术和无人机技术的不断发展,机载激光扫描在电力巡线方面的应用也逐渐成为业内关注的热点[1-5]。
机载LiDAR可以很好地解决空间定位和三维测量精度的问题,作业周期短,能够快速获取电力线走廊的电力设施、植被分布、沿线建筑等空间信息。因此,机载LiDAR可以应用于电力巡检工作中,快速排查电力设施周围的安全隐患。在数据中自动识别分类并提取单根电力线点云是该技术应用的难点之一,目前,已有学者对此进行了研究,并且取得了一定成果。刘正军等基于直方图统计分析法对电力线点云进行分层,然后对单根电力线进行分离,从而建立了悬链线方程模型,不过该方法对悬垂较大的电力线数据处理效果不佳,同时对数据点缺失的电力线也不能适用[6-7]。邱焕斌采用对横截面采样并聚类的方法提取电力线束,不过该方法对单条电力线在横断面上的分布有一定的要求,具有一定的实施局限性[8]。梁静等提出了一种基于KD树聚类的电力线识别方法,该方法仅适用于连续且紧密相连的电力线数据,无法处理电力线点云不连续的数据[9]。余洁等人提出采用霍夫变换分离单根电力线的方法,但是不能避免传统霍夫变换带来的检测误差以及杂乱数据点干扰,从而影响检测的准确度[10]。Y.Jwa等人提出基于空间格网识别单根电力线的方法,但是仅适用于点云密度较高的数据[11]。Thomas Melzer等人提出了应用迭代霍夫变换提取单根电力线,该方法在一定程度上解决了传统霍夫变换带来的提取精度不高的问题,但是依然存在检测直线不准确的问题,导致电力线点云分类错误[12]。
因此,为解决上述技术中存在的问题,本文结合霍夫变换与最小二乘拟合法实现了一种鲁棒性及实用性更强的LiDAR数据电力线分类方法。
1 机载LiDAR点云电力线提取方法
1.1 数据预处理
初始的数据集中包含了大量与电力线无关的信息,如地面、植被、建筑等,给电力线信息提取带来不必要的干扰,并且增加了冗余的运算量。因此,在进行计算之前需要先将这些点云排除。
预处理的过程主要包括去除地面点云(点云滤波)和去除距离地面高差小于一定阈值(电力线一般高于建筑物、植被等地物)的地物点云。本文采用了三角网渐进加密滤波算法分类地面点,并在地形参考面上根据设定的高程阈值进行地物分类,将距离地面小于一定高度的点云排除。这些预处理的过程均为现有的成熟技术,并且比较通用,本文不再赘述。
1.2 迭代霍夫变换
霍夫变换是图像处理领域的一种成熟方法,可以用于识别图像中的直线特征。两个电塔之间的电力线在XY平面上投影正好为平行的直线,根据这一特征,可以应用霍夫变换的原理进行电力线识别。
将霍夫变换应用于点云数据时,由于点间距的存在和点云的离散性,或者数据采集时电力线的晃动,电力线点云并非严格按照数学意义上的直线排列,对数据集一次性进行霍夫变换直线提取时格网值的阈值很难控制,并且直线的数目也难以确定,直线识别效果并不理想。
为了避免上述的问题,本文采用迭代霍夫变换方法,即对数据集点云进行霍夫变换后,仅统计霍夫空间累加值最大的格网用以获得直线方程,并用该直线方程筛选呈直线排列的点云,然后将剩余点云重复进行上述步骤,直到全部直线均被检测(在实际应用中,可以根据电力走廊的电力线数目设置迭代次数)。通过迭代的霍夫变换,每次提取的直线都是当前数据集中直线形态最明显的点云,计算结果明显优于直接进行霍夫变换。
1.3 最小二乘法优化HT的直线方程
采用霍夫变换可以直接获得直线的极坐标方程参数,但是由于实际的电力线点云并非严格按照直线排列,获取的直线方程只能反映数据集中直线形态最明显的点云分布,而并不是穿越整条电力线最优直线。此时,根据点到直线的距离作为条件进行电力线点云分类时,会出现误分类或者同根电力线点云分类不完全的情况。因此,本文对获取直线方程的方法进行了改进,霍夫变换中引入最小二乘的方法拟合单条电力线的直线方程,具体方法如下:
在霍夫变换获取最大累加值的格网后,将参与计算该格网的点云进行标记,得到点集P1=(xi,yi,zi),(i= 1,2,…,N),对该点集进行直线最小二乘拟合。最小二乘拟合对离群点的干扰特别敏感,而经过霍夫变换的点集很好地排除了离群点,因此应用最小二乘可以获得穿越点集的最优直线方程。
1.4 电力线点云分类
获取直线方程之后,可以根据点到直线的距离公式:
(1)
将d满足阈值的点云分类为同一根电力线,记为点集P2。在实际应用中,输电线路通常是多层分布,在XY平面内有可能产生重叠,仅用XY平面内点到直线的距离有可能获得多条电力线点云。根据电力线点云分布的特征:同根电力线的相邻点云三维距离很近,远远小于不同根电力线的点云,可以对P2中的多条电力线点云进行分离。即对P2中的点集根据XY坐标进行排序,相邻点云的三维距离若小于阈值则分类为同一根电力线。
1.5 电力线建模
两个电塔之间的电力线点云呈悬链线形态。悬链线方程级数展开为抛物线方程[13],因此,可以采用空间抛物线方程作为电力线模型。电力线在XY平面内的直线方程斜截式:
y=kx+b
(2)
在通过该直线且垂直于XOY的MOZ平面上,电力线为一根抛物线。根据式(3)将电力线点云x的坐标投影到抛物线所在的MOZ平面,应用最小二乘拟合对单根电力线进行抛物线拟合,得到抛物线方程(4)。
m=x/tan-1k
(3)
am2+bz+c=0
(4)
由(1)、(4)式可得到空间三维点集抛物线方程,即电力线模型方程。
2 实验
在Visual Studio 2010 C++开发环境中,实现了本文所述的电力线提取方法。实验计算机配置为Intel i5-2300 CPU 2.8HZ,4.0G内存,装配Windows7系统。
采用了两组实验数据。第一组实验数据由中国测绘科学研究院采集的广州某地的输电线数据。该电力线路长度约为353m,点云平均密度为84点/m2,包含4层共8根电力线。首先对数据进行滤波处理,然后根据地形,采用10m作为高程阈值,将高程小于该阈值的点排除。霍夫变换时,角度参数粒度设置为0.5°,电力线提取及重建的结果如图1所示,使用本方法对每根电力线进行了分离,精确重建了每根电力线。

图1 第一组实验电力线提取及重建Figure 1 First group experimental power line extraction and reconstructing
第二组实验数据由煤航测绘院提供,为国外某地的电力线走廊数据(图2)。该数据点云密度较低,平均点密度为23个点/m2,电力线数据存在密度、断裂的情况,本文截取了其中两个电塔之间的部分电力线点云,在数据质量较差的情况下,单根电力线分离和重建的效果。霍夫变换角度参数粒度设置为0.1°(图3),每一根电线都能够正确的分离,对其中的分裂导线也进行了详细的区分。
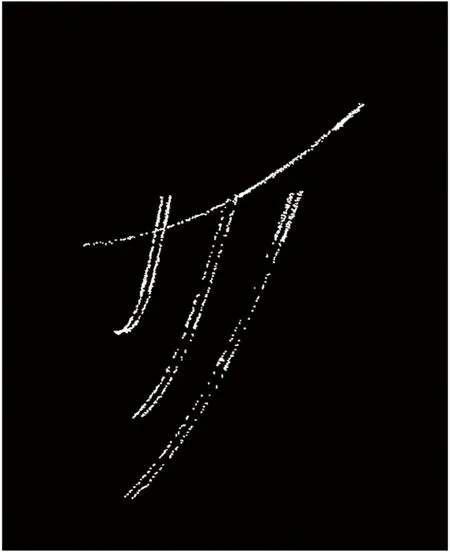
图2 实验数据2示例Figure 2 Experimental data 2 demonstration
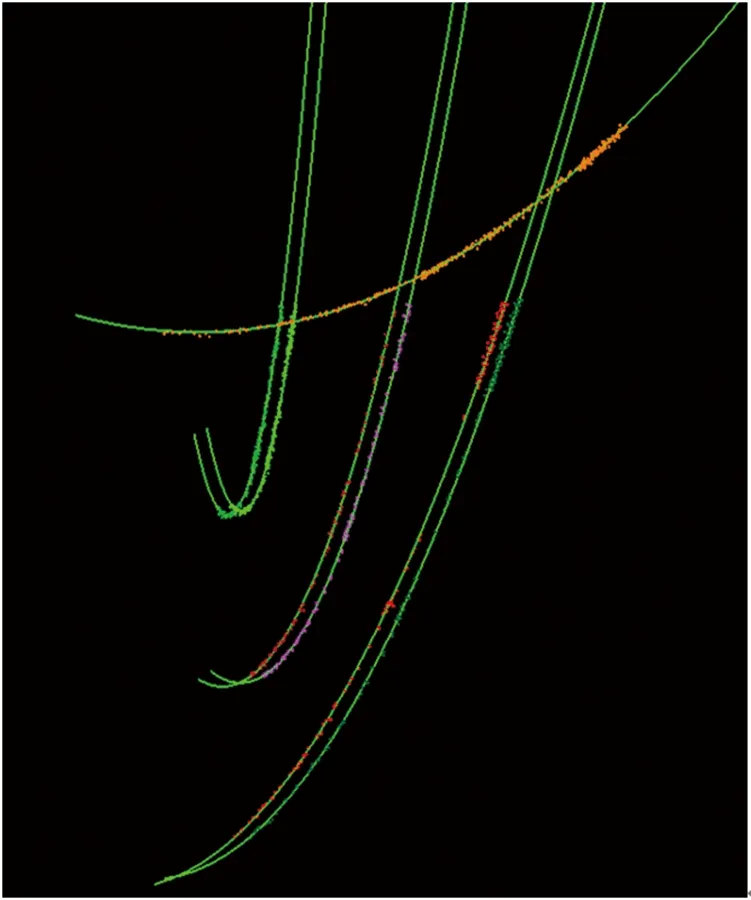
图3 实验数据2电力线重建结果Figure 3 Experimental data 2 power line reconstruction result
将本方法应用于上述两组质量不同的数据时均取得了较好的效果,实验说明,直线识别的精确度依赖于霍夫变换中角度参数的粒度,在需要精确分离电力线时,该参数应选择较小的值。
3 结论
针对机载LiDAR在电力巡线中的应用,提出了一种机载LiDAR点云电路线提取方法,采用迭代霍夫变换识别电力线,并在现有的霍夫变换基础上引入了最小二乘原理,提高了电力线分类的精度,该方法对电力线点云稀疏、密度分布不均匀的数据也具有良好的适应性,目前已经正式应用于煤航数据处理软件LiDAR-DP。
下一步的研究将侧重于提高迭代霍夫变换计算的效率以提高其速度。同时,研究多档电力线两个电塔之间的数据自动分割方法,以提高其自动化程度。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31 09:46:28
中外文摘(2022年8期)2022-05-17 09:13:36
中老年保健(2021年4期)2021-08-22 07:10:04
电线电缆(2018年2期)2018-05-19 02:03:42
电子制作(2017年14期)2017-12-18 07:07:59
电信科学(2016年11期)2016-11-23 05:07:50
电测与仪表(2016年12期)2016-04-11 12:28:18
电测与仪表(2015年8期)2015-04-09 11:50:28
电测与仪表(2014年13期)2014-04-04 12:04:08
电测与仪表(2014年20期)2014-04-04 11:58:08
