车联网环境下快速路出口匝道与地面衔接区多阶段控制方法
2021-12-16 08:52:16慈玉生韩应轩吴丽娜
交通运输工程与信息学报 2021年4期
慈玉生,韩应轩,吴丽娜
车联网环境下快速路出口匝道与地面衔接区多阶段控制方法
慈玉生1,韩应轩1,吴丽娜2
(1. 哈尔滨工业大学,交通科学与工程学院,哈尔滨 150090;2. 黑龙江工程学院,汽车与交通工程学院,哈尔滨 150050)
为了提高快速路出口匝道与地面衔接区的通行效率,提出了一种车联网环境下出口匝道与地面衔接区多阶段控制方法。首先,根据速度特性将出口匝道与地面衔接区划分为调整区、缓冲区和排队区。然后,针对衔接区车辆冲突频繁问题,提出了一种考虑相位优先级的车道变换策略。最后,在此基础上设计了三阶段快速路出口匝道与地面衔接区控制方法,并基于MATLAB和VISSIM搭建了车联网仿真环境。仿真结果表明:文中方法控制下衔接区路段间速度波动更小,平均速度提高了5%;与车联网速度控制相比,衔接区、排队区和缓冲区的延误分别降低了4%、6%和4%。此外,敏感性分析可知:当衔接区交通需求处于中等饱和度和渗透率大于70%时,本文方法控制效果优势最为明显。相关成果可为车联网环境下出口匝道与地面衔接区控制提供理论支持。
智能交通系统;快速路;出口匝道与地面衔接区;车联网;速度控制;车道变换
0 引 言
城市快速路的相对封闭性使得其出入口匝道与地面道路衔接区交通拥堵频发,出现入口匝道“上不来”和出口匝道“下不去”等问题。尤其当交通需求较大时,多股交通流在出口匝道与地面衔接区交织,极易引起交通拥堵。
当前研究一般通过对出口匝道和辅路信号控制及合理设计交通组织来减少衔接区交通冲突。例如Gunther等[1]通过确定出口匝道与辅路的竞争关系,将辅路部分交通流通过绕行其他道路来提高出口匝道衔接区通行能力;Zhao和Liu[2]提出一种非传统车道渠化集成模型来减少衔接区车辆交织,提高衔接区通行能力;Zhao等[3]利用在辅路设置预信号和引入车辆分拣区的概念来消除出口匝道衔接区交通冲突从而提高衔接区运行效率;Yang等[4]开发了出口匝道排队长度评估、干线动态绿波优化及出口匝道优先控制的集成控制系统,较好地解决出口匝道与地面道路衔接区交通拥堵问题,有效缓解了出口匝道排队溢出现象。
上述研究均是通过交通设计、交通控制等方面被动改善出口匝道与地面衔接区交通运行情况[5, 6]。近年来,车联网技术的发展和应用为城市交通管控提供了一种新的方法,可为解决快速路出口匝道与地面衔接区拥堵问题提供一个新的思路。在车联网环境下,车辆之间、车辆与信号灯等基础设施之间可以进行信息交互,并能提供给驾驶员合适的速度引导信息使车辆不停车通过交叉口,同时能实时为信号控制提供数据源[7]。如鹿应荣等[8]研究了车联网环境下信号交叉口车速控制策略,构建了加速和减速控制模型,提高了信号交叉口的通行效率,但未考虑交叉口存在排队的情况;Wu等[9]考虑排队长度对速度控制的影响,根据车辆到达控制区请求速度控制时相位状态和交叉口排队情况,优化得出车辆到达停车线的最佳引导速度和到达交叉口的时刻,但未考虑车辆到达速度控制区的初始速度与引导速度之间的差值问题;Li等[10]在车联网环境下基于可接受间隙理论构建了入口匝道与主线衔接区的车辆组行为模型,并使用VISSIM时间切片仿真策略对模型进行了评估,从而提高主线与入口匝道衔接区交通安全及效率;Jing等[11]针对入口匝道车辆汇入主线易发生冲突引发通行效率降低的问题,以燃油消耗和行程时间最小为目标,提出了一种车联网环境下基于合作的多人游戏优化算法来实现合流车辆的协调控制;Mo等[12]针对三种出口匝道与主线衔接区场景提出了四种不同道路空间平衡条件下的车辆组合协作策略,并进行了仿真和评价;庞明宝等[13]针对出口匝道超长排队现象和高饱和度入口匝道提出了主线分散换道和速度控制自适应控制方法,并采用元胞自动机模型进行了仿真验证。
以上研究主要集中于信号交叉口和快速路主线、出入口匝道衔接区的车联网控制,除此之外还包括对车联网环境下快速路入口匝道与主线速度控制[14]、多车道协同换道[15]、高速公路合流区控制[16]及快速路入口匝道交通量预测[17]等。但出口匝道与地面衔接区多股交通流交汇导致的通行效率低下和冲突严重的问题也应引起重视,尤其是车联网在出口匝道与地面衔接区相关研究。本文针对出口匝道与地面衔接区车辆间冲突严重导致排队过长问题,构建考虑排队长度和初始速度与引导速度间速度差的速度控制模型,结合出口匝道衔接段车道变换策略,提出了车联网环境下出口匝道与地面衔接区多阶段控制方法。研究网联车在不同渗透率和不同道路饱和度下的运行情况,并对不同渗透率下缓冲区长度进行敏感性分析,为网联车在出口匝道与地面衔接区的控制应用提供相应的参考。
1 问题描述
1.1 出口匝道与地面衔接区划分
出口匝道与地面衔接区包括出口匝道、辅路以及出口匝道与地面衔接点至下游交叉口停车线之间的区域,如图1所示。为了更好地对出口匝道与地面衔接区进行车联网控制,评价各部分的控制效果,将该区域划分为调整区、缓冲区、排队区三部分,并假设出口匝道与地面衔接区为三车道[18]。第一部分为调整区,辅路和主线交通流进入该区域后便进行速度调整;第二部分为缓冲区,辅路和出口匝道的网联车在缓冲区换道后进入目标车道;第三部分为排队区,驶入车辆和车道变换结束的车辆以车队的形式快速通过交叉口。车联网控制区可由调整区、缓冲区和排队区三部分组成,见下式:

式中,为控制区长度(m);为调整区长度(m);为缓冲区长度(m);为排队区长度(m)。
1.2 基本假设
车联网环境下快速路出口匝道与地面衔接区交通控制[7]需要作如下假设:
(1)车辆均搭载智能车载单元,路侧设置智能路侧单元,可以实现与控制中心的实时通信,通信延迟误差在可接受范围之内;
(2)车辆每隔1s与路侧设备交换位置、速度和行驶方向等信息;
(3)不考虑行人和非机动车的影响。
1.3 控制区长度确定
车联网控制区最短长度应满足车辆以任意初始速度进入控制区后均可以调整至目标速度;最大长度应保证网联车在一个信号周期时间内能通过衔接交叉口[19]。车联网控制区长度范围确定如下:

2 出口匝道与地面衔接区控制方法
2.1 出口匝道与地面衔接区速度控制模型
考虑停车线前排队长度和车辆进入控制区时初始速度调整至最佳引导速度的时间,根据车辆进入车联网控制区时相位情况,建立红灯情形下和绿灯情形下的速度控制模型[20, 21]。
情形1:当车辆以某一初始速度驶入速度控制区时,此时信号灯处于红灯,且出口匝道与地面衔接区停车线前存在一定的排队长度。


到达停车线的时刻和最终的建议引导速度分别如式(5)和(6):




情形2:当网联车进入速度控制区时,此时信号灯显示为绿灯,但车辆按照当前速度行驶无法通过交叉口。对网联车进行速度控制存在两种情形,即在不考虑二次停车的情况下,网联车可以通过加速在本周期绿灯时间内通过交叉口,或不能通过则减速在下个周期的绿灯期间通过[9]。此种情况只考虑两个周期的情况,则最佳的引导速度见下式:
因此,快速路出口匝道与地面衔接区速度控制过程如图2所示[22]。

图2 快速路出口匝道与地面衔接区速度控制流程图
2.2 缓冲区车道变换策略

Step1 当车辆进入衔接段缓冲区后,判断车辆是否需要变道,首先确定是否满足变道安全条件。变道安全条件为换道过程中后车与换道车辆之间距离大于潜在碰撞距离[24],见下式:

如果满足安全条件,开始换道,否则进入下一步。
Step2 如果不满足安全条件,判断换道车辆行驶路径是否与当前信号交叉口相位通行状态一致。假设出口匝道衔接交叉口相位方案为左转和直行分别放行,当左转相位为当前相位时,左转车辆优先于直行车辆换道;当直行相位为当前相位时,直行车辆具有较高的优先级;当前相位均不是左转和直行相位时,执行下一步。
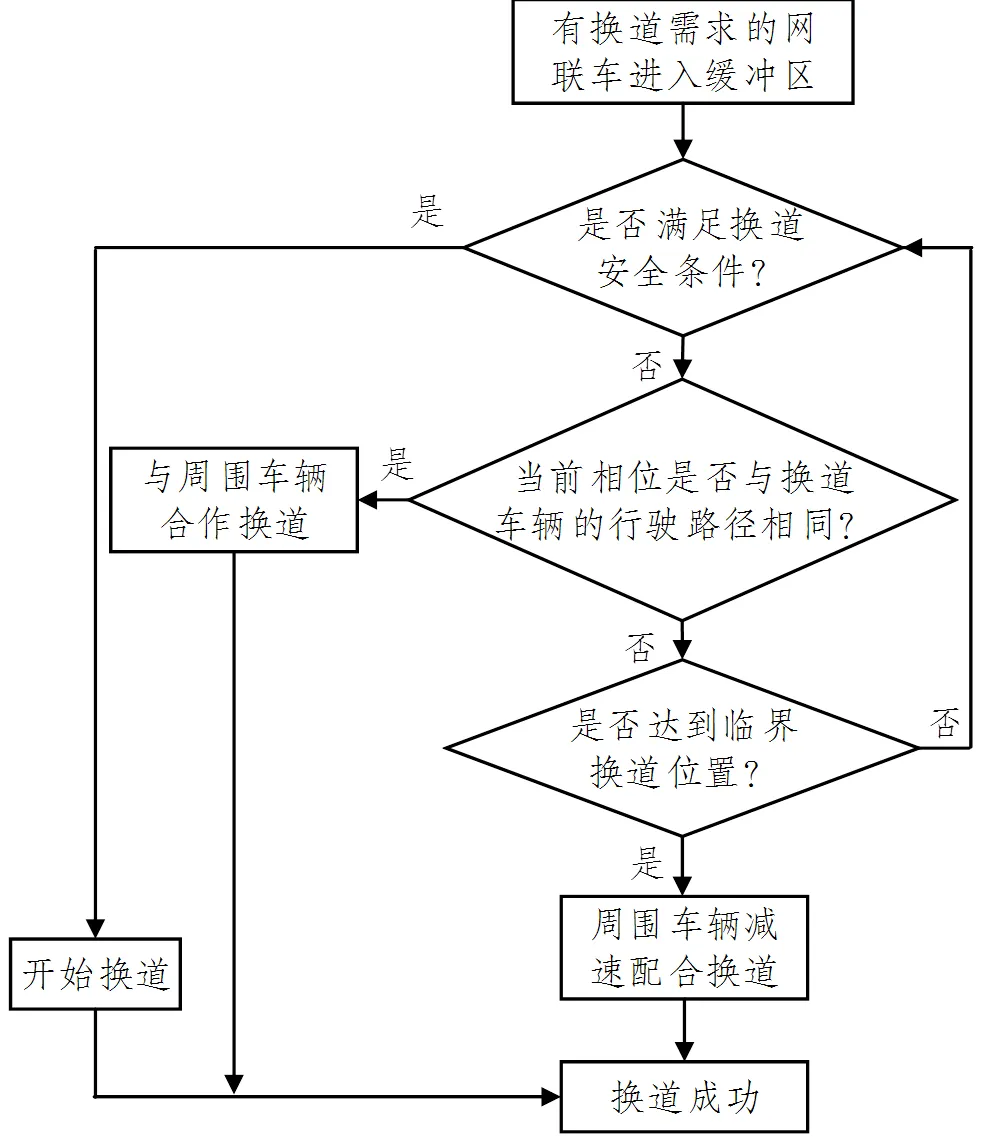
图3 快速路出口匝道与地面衔接区车道变换策略
2.3 出口匝道与地面衔接区三阶段控制方法
根据衔接交叉口区划分情况,对应网联车在衔接区控制策略可分为三个控制阶段:速度调整阶段、缓冲换道阶段和排队通过阶段[25]。快速路出口匝道与地面衔接区的控制流程如图4所示。


Step2 缓冲换道阶段。进入到缓冲区后的网联车要根据信号相位状态进行相应换道行为,进入相应车道。按照出口匝道与地面衔接区缓冲区车道变换策略进行车道变换。
Step3 排队通过阶段。进入目标车道后,车辆进入排队通过区。若此时为绿灯相位,且前方不存在排队车辆,网联车可作为头车加速至最大速度快速通过交叉口,否则跟随前方车辆形成车队通过交叉口;若此时为红灯相位,则以最小速度驶入排队区,尽可能不停车通过交叉口,减少燃油消耗和尾气排放。
3 案例分析
本文以济南市二环南快速路出口匝道衔接二环南路与舜耕路区域为例来验证本文方法的可行性。该出口匝道衔接地面道路进口道设置有两条直行车道、两条左转车道和一条右转车道,出口匝道设置两条车道,辅路设置三条车道(包括一条右转专用车道),车道宽度均为3.5m;调整区长240m,缓冲区长100m,排队区长60m,大型车与小型车的比例为1∶9,如图5所示。衔接交叉口的周期时长为216s,东西直行相位有效绿灯时间为87s,东西左转相位有效绿灯时间为42s。换算后的快速路出口匝道与地面衔接区进口道交通流量如表1所示。
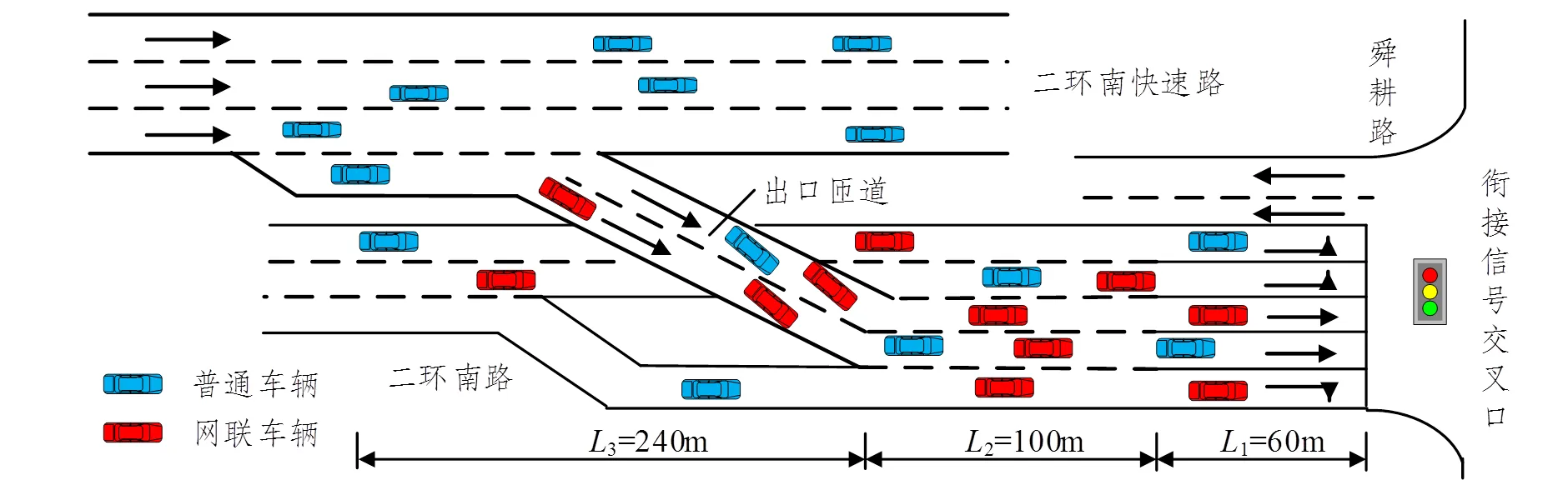
图5 济南二环南快速路出口匝道与地面衔接区示意
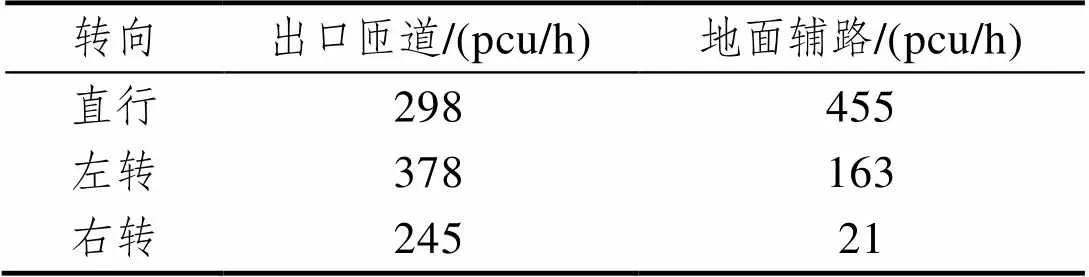
表1 快速路出口匝道与地面衔接区交通量
3.1 实验方案
首先,利用VISSIM软件建立仿真模型,对仿真参数标定后结果为:安全距离附加部分为3.54,安全距离倍数部分为3.40,最大减速度为6m/s2,平均停车间距为1.8m,最小前视距离标定为10m,前方可观察车辆数为3辆,最长等待时间为45s,最小车头间距为0.5m,直行车道和左转车道的饱和流率分别为1 260 pcu/h和1 152 pcu/h。经校验,东西南北四个进口道的流量误差为0.35%、2.44%、0.71%和1.28%,能较好地反映实际的交通情况。
其次,使用MATLAB编程调用VISSIM的COM接口搭建车联网环境,对出口匝道与地面衔接区进行车联网控制。为了避免路网未完全加载所产生的误差,设置仿真时间为5 400s,选取1 800~5 400s为仿真数据输出分析时段。将排队区、缓冲区和调整区路段编号1至7,通过分析各路段速度分布波动程度来对比定时控制与车联网控制下交通运行状况[26]。在出口匝道衔接交叉口信号周期固定的情况下,将采用传统定时控制、基于ALINEA的辅路反馈控制[27]、仅车联网速度控制[8]以及本文方法进行对比分析。对文中方法进行影响因素敏感性分析,研究网联车在不同渗透率或驾驶员服从率和不同饱和度下的延误变化情况,并对不同渗透率下缓冲区长度对延误的影响进行分析。
3.2 结果分析
出口匝道与地面衔接区各路段车联网控制前后每间隔2min的速度分布情况如图6和表2所示。从图6(a)中可以看出,路段1、2、3之间的速度变化较大,这与实际交通情况相符,红灯期间车辆在排队区聚集,并且辅路和匝道车辆在缓冲区聚集,导致车速降低和各区段之间速度波动变大。从图6(b)中可以看出,文中方法控制下各路段间速度变化幅度相对平稳,由表2可知速度均值相对定时控制提高了5%,方差相对于定时控制降低了7.4%,中位数提高了2%,整体运行速度有了一定的提高。主要因为对出口匝道与地面衔接区进行车联网控制后,可以控制车辆车速尽可能不停车通过交叉口。在缓冲区可以根据此时信号相位情况,变道车辆可以更快速度变换至目标车道,减少因车辆交织产生的延误。

图6 出口匝道与地面衔接区各路段速度分布图

表2 速度分布分析表(km/h)
不同控制方法下延误和停车次数指标的变化情况如图7和图8所示。对于衔接区,文中方法相对于定时控制、辅路反馈控制和仅车联网速度控制延误降低了45%、42%和4%,停车次数降低了31%、18%和4%。与定时控制相比,辅路反馈控制可以通过获取缓冲区的排队长度和占有率来调节辅路进入缓冲区的交通量,减少了辅路和匝道车辆交汇产生的冲突,缓冲区的延误和停车次数降低了33%和9%,但不会提高排队区的通行效率;相对于辅路反馈控制,车联网速度控制使衔接区的延误和停车次数减少了39%和14%。文中方法在车联网速度控制的基础上考虑了相位优先级进行车道变换,当前相位下的车辆能更快地通过缓冲区,提高了当前相位下的绿灯利用率;相对于仅车联网速度控制,排队区和缓冲区的延误分别降低了6%和4%,停车次数降低了9%和7%,说明了文中方法的有效性。
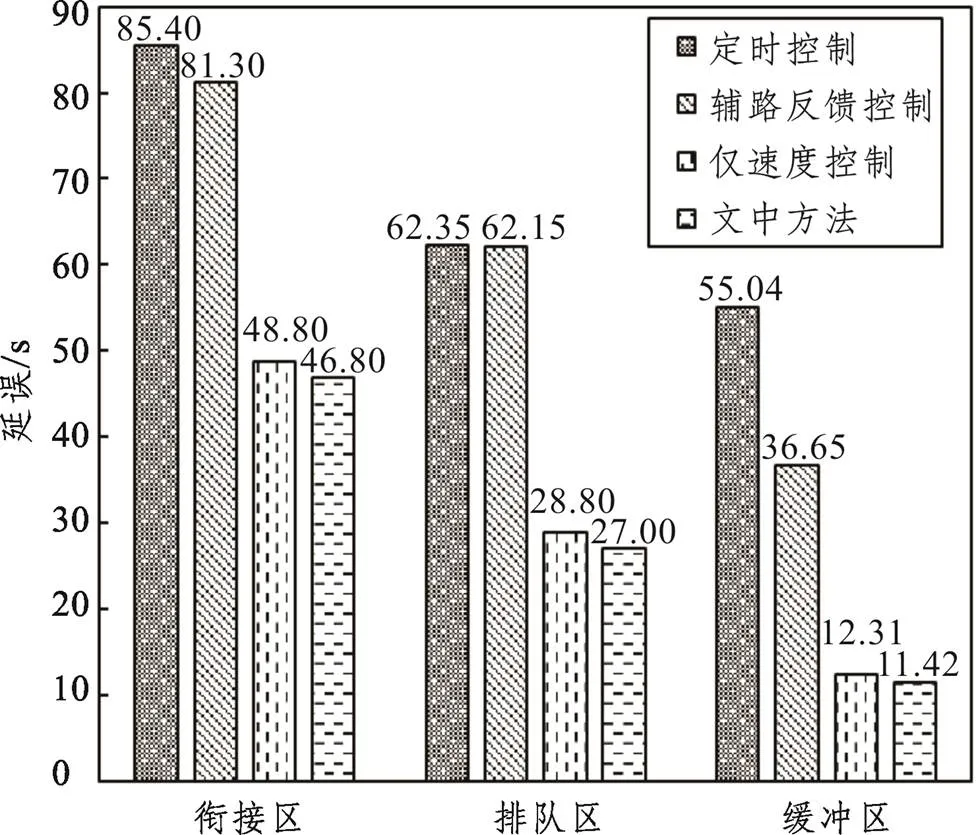
图7 不同控制方法延误对比图
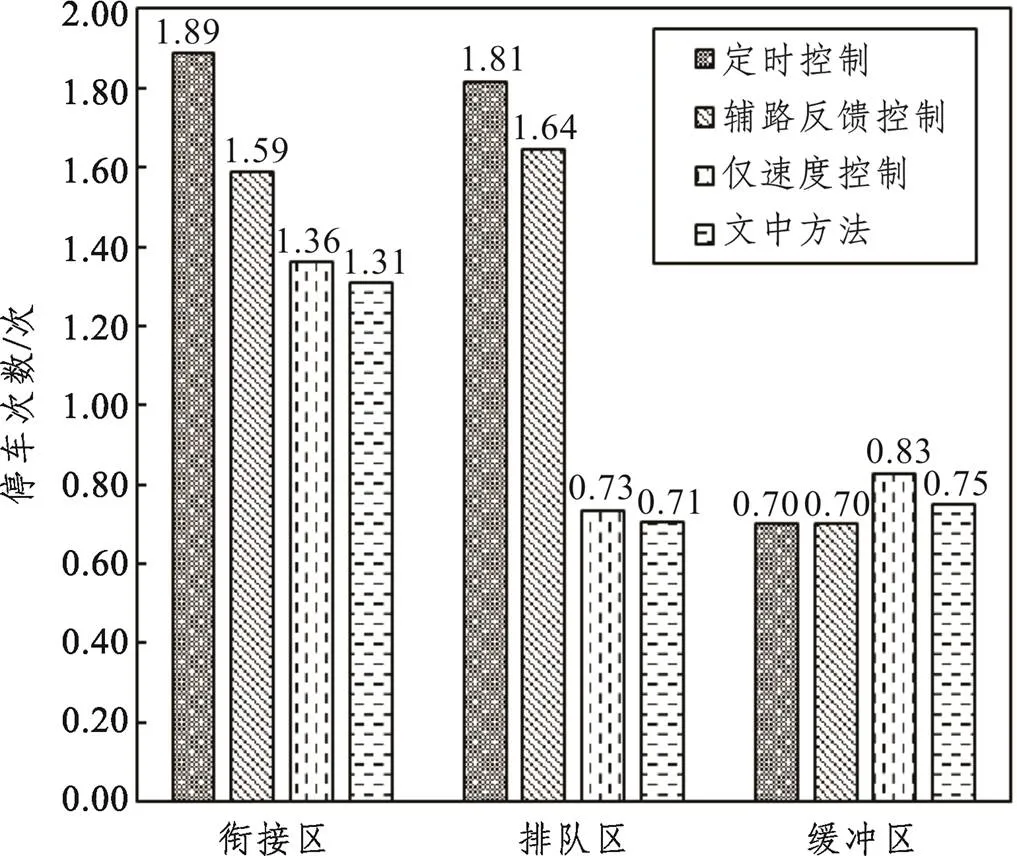
图8 不同控制方法停车次数对比图
分析在低、中、高饱和度下,不同网联车渗透率对出口匝道与地面衔接区车均延误的影响,如图9所示。选取饱和度为0.2、0.5和0.8反映道路在不同交通需求下的情况。为避免随机因素影响,选取不同随机种子进行多次仿真,仿真结果取平均值。从图9可知,出口匝道与地面衔接区的车辆延误在三种饱和度情形下均随着网联车渗透率的增加而降低。线性拟合之后的斜率为1.27、3.15和3.13,说明在中饱和度情形下延误随渗透率增加降低最快;当渗透率大于70%时,随着渗透率的增加中饱和度情形下的延误最低。这是因为在中饱和度下,车辆更易形成稳定流,随着渗透率的增加,网联车比例增加,传统车辆受网联车辆影响更容易形成饱和车队,提高了通过衔接交叉口的效率。

图9 不同渗透率和饱和度下的延误变化图
出口匝道与地面衔接区的缓冲区是提供两股交通流汇聚的区域,需要一定的距离供车辆变换车道。图10反映了饱和度为0.8的情形下不同渗透率和缓冲区长度下对出口匝道与地面衔接区延误的影响。从图中可以看出,当渗透率在40%至80%之间为中渗透率时,延误随缓冲区长度的增加呈现出先减小后增大再减小的趋势;在低渗透率和高渗透率情形下,缓冲区长度变化对延误的影响较小。主要因为在中渗透率情形下,网联车辆和传统车辆比重相当,车辆间的交互行为较为复杂,对缓冲区长度的变化较为敏感。当车辆处于完全网联环境下,车辆运行延误主要来自于因信号灯相位切换而调整车速产生的信控延误。
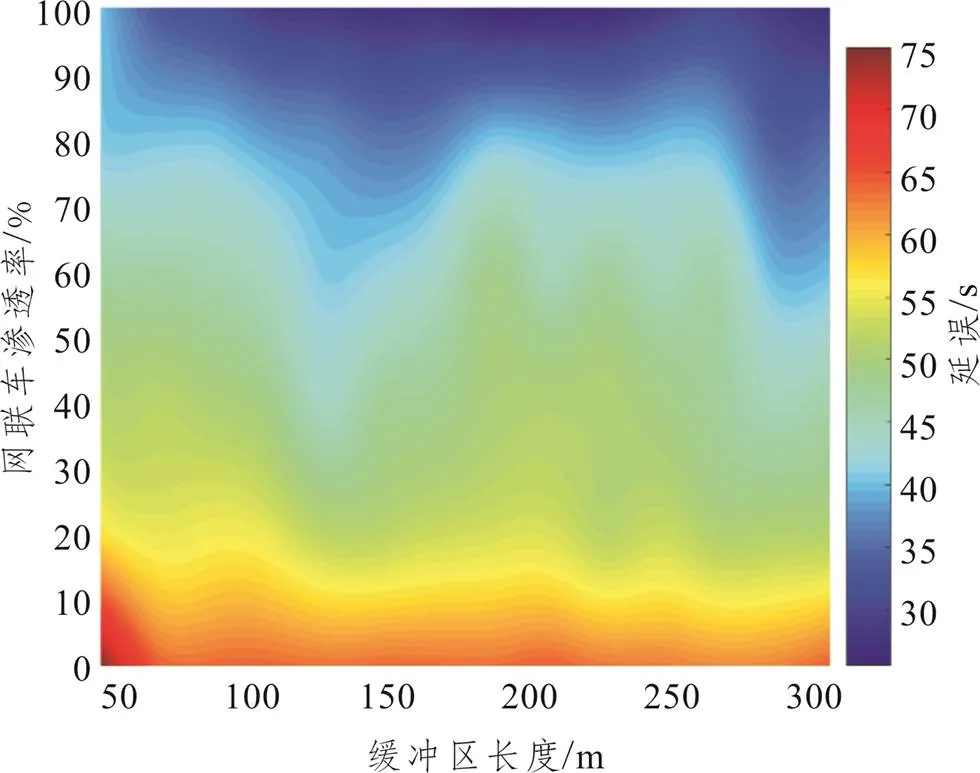
图10 不同渗透率和缓冲区长度下延误变化图
4 结束语
本文以快速路出口匝道与地面衔接区交通流为研究对象,提出了一种车联网环境下出口匝道与地面衔接区多阶段控制方法。
(1)考虑衔接交叉口排队长度和初始速度与引导速度间的关系,建立了快速路出口匝道与地面衔接区的速度控制模型,提出了一种考虑相位优先级车道变换策略。经验证,本文方法可以有效减少排队区的排队长度,各路段间速度波动变小,平均速度提高了5%;与定时控制、辅路反馈控制和车联网速度控制相比,衔接区延误降低了45%、42%和4%,停车次数降低了31%、18%和4%。
(2)对饱和度和渗透率进行了敏感分析,结果表明,衔接区延误随饱和度和渗透率的增加而降低,当渗透率大于70%时,出口匝道与地面衔接区处于中饱和度下更易形成稳定的饱和交通流,车辆更快地通过衔接交叉口。
(3)在高饱和度情形下,出口匝道与地面衔接区的缓冲区长度变化在低渗透率和高渗透率下对延误影响较小,中渗透率下延误随缓冲区长度的增加呈先减小后增大再减小的趋势。
然而,本文未考虑车联网环境下受控车辆对周围车辆的影响和多车交互的优化控制,需要后续进行深入研究,未来将会考虑在车联网环境下出口匝道与衔接交叉口的联合控制进一步研究。
[1] GUNTHER G E, COEYMANS J E, MUNOZ J C, et al. Mitigating freeway off-ramp congestion: asurface streets coordinated approach[J]. Transportation Research Part C: Emerging Technologies, 2012, 20(1): 112-125.
[2] ZHAO J, LIU Y. Integrated signal optimization and non-traditional lane assignment for urban freeway off- ramp congestion mitigation[J]. Transportation Research Part C: Emerging Technologies, 2016, 73: 219-238.
[3] ZHAO J, MA W J, XU H J. Increasing the capacity of the intersection downstream of the freeway off-ramp using presignals[J]. Computer-Aided Civil and Infrastructure Engineering, 2017, 32(8): 674-690.
[4] YANG X, CHENG Y, CHANG G L. Integration of adaptive signal control and freeway off-ramp priority control for commuting corridors[J]. Transportation Research Part C: Emerging Technologies, 2018, 86: 328-345.
[5] 赵海娟, 赵海平, 李金萍. 基于交通流特性的高速公路出口匝道与地面道路衔接部安全几何设计[J]. 交通运输工程与信息学报, 2017, 15(1): 47-55.
[6] 赵海娟, 陆键. 上跨式互通立交出口匝道与地面道路衔接部渠化设计研究[J]. 交通运输工程与信息学报, 2011, 9(4): 101-107, 124.
[7] 张存保, 冉斌, 梅朝辉, 等. 车路协同下道路交叉口信号控制优化方法[J]. 交通运输系统工程与信息, 2013, 13(3): 40-45.
[8] 鹿应荣, 许晓彤, 丁川, 等. 车联网环境下信号交叉口车速控制策略[J]. 交通运输系统工程与信息, 2018, 18(1): 50-58.
[9] WU W, HUANG L, DU R H. Simultaneous optimization of vehicle arrival time and signal timings within a connected vehicle environment[J]. Sensors, 2019, 20(1): 191-205.
[10] LI H J, ZHANG J J, LI Y X, et al. Modeling and simulation of vehicle group collaboration behaviors in an on-ramp area with a connected vehicle environment[J]. Smart and Resilient Transportation, 2019, 1(1): 17-29.
[11] JING S C, HUI F, ZHAO X M, et al. Cooperative game approach to optimal merging sequence and on-ramp merging control of connected and automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(11): 4234-4244.
[12] MO T, LI K Y, ZHANG J J, et al. Collaborative strategies and simulation of vehicle group behaviors for off-ramp areas[J]. Journal of Advanced Transportation, 2020, 8817364: 1-11.
[13] 庞明宝, 安少怡. 快速路与邻接交叉口分散换道和速度引导方法[J]. 交通运输系统工程与信息, 2019, 19(6): 168-175.
[14] WU L N, CI Y S, SUN Y C, et al. Research on joint control of on-ramp metering and mainline speed guidance in the urban expressway based on MPC and connected vehicles[J]. Journal of Advanced Transportation, 2020, 7518087: 1-8.
[15] 李珣, 曲仕茹, 夏余. 车路协同环境下多车道车辆的协同换道规则[J]. 中国公路学报, 2014, 27(8): 97-104.
[16] 王东柱, 陈艳艳, 马建明, 等. 车联网环境下的高速公路合流区协调控制方法及效果评价[J]. 公路交通科技, 2016, 33(9): 99-105.
[17] CIY S, WU H L, SUN Y C, et al. A prediction model with wavelet neural network optimized by the chicken swarm optimization for on-ramps metering of the urban expressway[J]. Journal of Intelligent Transportation Systems, 2021, 74944035: 1-11.
[18] WANG P W, JIANG Y L, XIAO L, et al. A joint control model for connected vehicle platoon and arterial signal coordination[J]. Journal of Intelligent Transportation Systems, 2019: 1-12.
[19] 安实, 姚焓东, 姜慧夫, 等. 信号交叉口绿色驾驶车速控制方法[J]. 交通运输系统工程与信息, 2015, 15(5): 53-59.
[20] YANG H, RAKHA H, ALA M V. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(6): 1575- 1585.
[21] 李鹏凯, 吴伟, 杜荣华, 等. 车路协同环境下多车协同车速引导建模与仿真[J]. 交通信息与安全, 2013, 31(2): 134-139, 148.
[22] 龙科军, 高志波, 吴伟, 等. 城市道路干线信号协调控制与车速引导集成优化[J]. 长安大学学报(自然科学版), 2018, 38(2): 94-102.
[23] ZHENG Y, RAN B, QU X U, et al. Cooperative lane changing strategies to improve traffic operation and safety nearby freeway off-ramps in a connected and automated vehicles environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 8855110: 1-10.
[24] 王涛, 徐良杰, 陈国俊. 基于车路协同的信号交叉口换道引导方法[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(2): 342-347.
[25] DU Z B, ZHANG Q Y, ZHAO P C. Research on vehicle control strategy at weaving area under vehicle infrastructure cooperative environment[J]. Journal of Physics: Conference Series, Iop publishing, 2020, 1486(7): 072013: 1-12.
[26] 胥川, 付川云, 朱援. 车速空间波动对城市快速路安全的影响分析[J]. 交通运输工程与信息学报, 2018, 16(2): 117-122.
[27] 乔岸青. 城市快速路出口匝道控制方法研究[D]. 长沙: 长沙理工大学, 2018.
Multi-stage Control Method for Urban Expressway Off-ramps and Ground Road Adjacent Areas under Connected Vehicle Environments
CI Yu-sheng1, HAN Ying-xuan1, WU Li-na2
(1. School of Transportation Science and Engineering, Harbin Institute of Technology, Harbin 150090, China; 2. School of Automobile and Traffic Engineering, Heilongjiang Institute of Technology, Harbin 150050, China)
To improve the traffic efficiency of urban expressway off-ramps and ground road adjacent areas, a multi-stage control method is proposed for an off-ramp and ground road adjacent area under a connected vehicle environment. First, according to vehicle speed characteristics, the selected adjacent area is divided into adjustment, buffer, and queuing areas. Then, considering the problem of frequent conflicts between vehicles in adjacent area, a lane-changing strategy is proposed that considers phase priority. Finally, a three-stage control strategy is designed for the off-ramp and ground road adjacent area, and a simulation environment of connected vehicles is built based on MATLAB and VISSIM. Simulation results show that the proposed method can reduce speed fluctuations between each road section while increasing the average speed by 5%. Compared with the speed control under connected vehicle environments, the delays in the adjacent, queuing, and buffer areasare reduced by 4%, 6%, and 4%, respectively. In addition, a sensitivity analysis shows that when the traffic demand is in medium saturation and the penetration rate is greater than 70%, the control effect of the proposed method is the most obviou. The relevant results can provide theoretical support for off-ramps and ground road adjacent areas under connected vehicle environments.
intelligent transportation systems; urban expressway; off-ramp and ground road adjacent area; connected vehicle; speed control; lane-changing
U491.1+2
A
10.19961/j.cnki.1672-4747.2021.04.0033
1672-4747(2021)04-0052-10
2021-04-22
2021-05-24
2021-05-26
2021-04-22~04-25; 05-12~05-15; 05-17~05-18; 05-24
国家重点研发计划项目(2017YFC0803907)
慈玉生(1980—),男,副教授,博导,研究方向:智能交通系统、交通安全,E-mail:ciyusheng1999@126.com
慈玉生,韩应轩,吴丽娜. 车联网环境下快速路出口匝道与地面衔接区多阶段控制方法[J]. 交通运输工程与信息学报,2021, 19(4): 52-61.
CI Yu-sheng, HAN Ying-xuan, WU Li-na. Multi-stage Control Method for Urban Expressway Off-ramps and Ground Road Adjacent Areas under Connected Vehicle Environments[J]. Journal of Transportation Engineering and Information, 2021, 19(4): 52-61.
(责任编辑:刘娉婷)
猜你喜欢
北京工业职业技术学院学报(2024年1期)2024-01-14 06:35:14
中国交通信息化(2022年7期)2022-10-27 06:35:38
中国交通信息化(2020年4期)2021-01-14 01:31:16
上海公路(2019年1期)2019-06-18 11:05:06
中国交通信息化(2018年11期)2018-03-01 05:43:42
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05 02:19:37
项目管理技术(2015年3期)2015-04-23 08:44:29
城市道桥与防洪(2014年8期)2014-02-27 07:28:25
城市道桥与防洪(2013年8期)2013-03-11 15:18:11
城市道桥与防洪(2013年8期)2013-03-11 15:18:00