
基于点云数据和图像处理技术的高速公路车辆流量检测
2021-12-16 09:44刘衍和
系统仿真技术 2021年1期
刘衍和
(青海交通职业技术学院,青海西宁 810003)
现代经济的迅速发展和汽车数量的迅猛增加,导 致交通运输对人们日常生活的影响日益增大,特别是高速公路对人们的生活生产极为重要,在这种情况下有必要对高速公路车辆流量进行精准检测,以有效提高高速公路车辆管理水平,保障高速公路的畅通性、安全性和节能环保性[1-3]。但由于传统的交通检测方法已不能满足复杂多变的高速公路现状,例如文献[4]中的方法只在车道单一、车辆较少的情况下准确率高,对于高速公路的双向四车道且处于高峰期车流量较大的情况,检测准确率较低[4]。文献[5]中的方法对光线的要求较高,晴天和白天对高速公路车辆流量检测较准确,但是阴天和夜晚的检测准确率偏低[5]。
为解决以上问题,本研究将点云数据和图像处理技术引入到该领域,点云数据是通过一定的测量手段采集到的目标物体表面特征的密集点集合,点数少且点与点间距大称为稀疏点云;点数多且比较密集称为密集点云。图像处理技术是采用计算机对图像信息进行有效处理的一种手段,图像数字化、图像增强、图像三维重建等均属于图像处理技术。因此为提升高速公路车辆流速检测准确性,本文将点云数据和图像处理技术进行有效结合,提出基于点云数据和图像处理技术的高速公路车辆流量检测方法,以期为交通管制提供一定数据支撑。
1 基于点云数据和图像处理技术的高速公路车辆流量检测
1.1 图像预处理
可以通过虚拟现实技术整合原始点云数据来进行原始点云图像的点云信息融合,使用中值滤波技术对融合后原始点云图像中的点云数据进行预处理[6-7]。即通过采用数字点云图像中某点云周围一定范围内其他点值的中值代替某点,以使该点周围的像素值靠近该点的真实值,消除个体噪声点云,实现图像的预处理。预处理完成输出值如公式(1)所示:

其中,b为窗口水平方向的大小;e为窗口垂直方向的大小;Z为平面窗口规格表示;二维数据串序号用Z2中的2 表示;Λij为图像上点云坐标即(i,j),Ψi,j为经过中值滤波处理的输出值。
通过图像预处理把原始点云数据转变为三维点云数据场,在此基础上进行图像点云优化[8]。
1.2 图像点云优化
可利用虚拟现实技术实现三维点云数据场的点云分布密集度的优化,首先及时调整各光束和3D激光扫描仪位置,再根据3D激光扫描仪光心同空间点连接产生的光束,建立光束平差模型。图像点云优化是指使用非线性改进法计算3D 激光扫描仪相关参数和空间坐标点时,使这两者间误差均匀分布且误差最小的方法[9-10]。在三维空间中,第a幅图像上空间点g的纵投影点和像素点之间距离平方和的最小值为

为去除图像中的配准噪声,随机选取一个初始值对公式(2)进行线性转换,再使用局部线性逼近方式完成图像从迭代到收敛,然后采用非线性最小平方法消除图像配准噪声。最后通过扩大图像迭代收敛范围实现图像点云优化,以得到精准的三维图像重建结果。
由于3D激光扫描仪有12项参数,其中4项是空间点参数。设有A幅图像,若要对图像上的G个空间点实行三维重建,那么对参数实行最小化调换的数量为12A+4G。当空间点个数G和图像幅数A增加时,参数最小化的计算量也会增加,导致图像三维重建效率降低。所以需要降低G和A的数量或采用稀疏矩阵方法以避免发生三维重建效率降低的现象。
为提高三维图像重建的准确性,可通过虚拟现实技术使三维数据点云分布得更为密集,从而避免因三维点云数据分配不均导致的数据重叠情况的发生[11]。为提升三维重建的完整度,可通过虚拟现实技术对图像点云进行自动检测,过滤掉噪声点和障碍物,使之能更好地覆盖目标图像表面的微小矩形面片集,从而提高完整度。
设定A幅图像序列集为I= {Ii|i= 1,2,…,A},把全部图像划分为单元模块Di(x,y),每个大小是r×r,保证每个单元模块都存在矩形面片λ,且可作为图像三维重建目标,d(λ)为矩形面片λ的中心,n(λ)为单位法向量。按照Harris 和DoG 算子得到图像对角点和特征块,进一步求取Di(x,y) 响应值,在结果中选择极大值,数量为η。此外,为获得稀疏重构矩阵面片λ的初始值,还需要对极大值实施图像间匹配和三角化。假设R(λ) = 1,使用光度一致性估算H(λ) 的初始值,在对d(λ) 和n(λ) 进行优化后重新计算H(λ) 值。重复此过程,直到出现|H(λ) | ≥β。
由于相邻矩形面片之间的向量相近,因此始于矩形面片λ,使用迭代法查找已有矩形面片Di(x,y) 和D′i(x,y),利用公式(3)判断二者间是否相邻,即

其中,ρ1为和r像素相对应的图像在d(λ) 和d(λ′)中心的深度;初始化后的λ用λ′表示。利用局部光度一致性对d(λ′)和n(λ′)进行约束优化,并采用全局可视化方法对H(λ′)进行约束优化,如果|H(λ) | ≥β,则改变S(λ′)中的深度图,并对扩展后的重建面片进行过滤,及时过滤错误匹配点。如果矩形面片λo在图像集U的外表面,关系如公式(4)所示,则过滤λo点;如果矩形面片λo在图像集U的内部,则需要再一次计算全部点的S(λo) 和H(λo)。 如 果 出现|H(λo)| <β,那么 过滤λo点。

1.3 点云图像三维重建
为了能够更好地表现出图像中帧点像素的分布情况,需要将虚拟现实技术优化的点云数据进行高斯分布,为组成重建模型打下基础。该模型中每个高斯分布的权重比例用来表示图像前景和图像背景的比例。用{X1,X2,…,XO}表示帧点像素在时间域O中的变化情况,随机选择帧点像素时间Xi,那么Xi是重建图像背景的比例,如公式(5)所示,即

其中,f(X,Y)为高斯概率密度函数,wi,j为权值,L为高斯分布项目个数。
将点云数据调整为高斯分布状态,以减小图像前景和背景间相对位移产生的重建差异。公式(6)为通过灰度和方差的关系函数表示的背景图像,即

其中,μi为图像帧点像素灰度通过高斯分布的平均值,σ2为像素方差。
最后,通过约束各帧点像素灰度计算过程,以精确匹配前景图像、背景图像和原始点云图像的点云位置,从而完成图像的三维重建。
1.4 运动目标跟踪法
由于跟踪目标的运动过程可获得更详细的目标运动信息,而且还会给目标检测提供可靠的数据来源,因此需要对其进行仔细分析。运动目标跟踪可确定所需目标在视频序列每一帧图像中所处的位置,可使多个目标的特征数据匹配在连续帧图像之间,以得到每一帧中所需目标的具体位置信息,从而完成目标的连续跟踪[12-13]。
现如今,多目标跟踪法被广泛应用于交通控制和人工智能中[14],本文采用基于均值漂移理论的半自动跟踪算法Mean Shift 实现多目标跟踪。该算法可以先创建初始目标模型,再创建候选目标模型,然后在不断迭代的过程中,对目标模型和初始模型进行匹配,直到找到最优匹配模型。在此过程中,需选取合适的相似性度量函数与核函数,Mean Shift向量可取计算相似性度量函数最大值时的向量,以表示目标从前一帧的初始位置向当前位置移动时的均值漂移向量[15]。由于Mean Shift的算法存在一定收敛性,因此可以通过不断的迭代计算使其向目标的真实位置靠近,直到收敛至目标实际位置,以达到目标跟踪的目的。
1.4.1 初始帧的目标模型
初始目标的概率密度函数如公式(7)所示,即

其中,xo为目标中心,n为面积,b(x)为特征值函数,h为最小外接矩形的高,k为帧数,u为位置点。
用δ表示单位脉冲函数,对该函数邻域内的像素分配不同的权重,使远离中心的像素权值较小,靠近中心的像素权值较大,标准化系数用C表示,如公式(8)所示,即
1.4.2 当前帧模型
候选区域是指当前帧中含有目标的区域,候选目标模型的概率密度函数如公式(9)所示,即

其中,y为核函数的中心位置,nc为候选目标面积。
1.4.3 相似性度量函数
相似性度量函数可表示初始目标模型和当前帧模型的相似程度,Bhattacharyya 函数是最常用的相似性度量函数,其定义如式(10)所示,即

其中,m为初始目标中心的个数,ρ(y) ∈[ 0,1]为初始目标模型和当前帧模型的匹配程度,该值越小则相似性越差,该值越大表示相似性越大。通过计算可得出当前帧中使ρ(y)最大化的候选模型,即为跟踪目标。
1.4.4 目标定位
通过计算得出前一帧中的目标中心,可把此中心当作当前帧的初始中心位置y0,以使ρ(y)取到极大值。假设y0为匹配搜索起始点,Bhattacharyya 系数可近似表示为公式(11),即
从表2可以看出,模板匹配和BP神经网络虽然用时较少,但其识别率相对于HOG+SVM较低;BP神经网络需人工选择特征,其识别效率可随网络深度的增加而提高,但其时间也会随着网络参数的增多而增加。本文算法相比较于其它算法在时间上略有增加,但识别率提升明显,适用于对识别精度要求较高的应用场景。

对其中关于y的函数进行分析,得出公式(12),即
用公式(12)估计加权后的核函数密度,当该式取最大值时,相似性系数也取最大值。当前帧中目标区域中心y0和实际位置y的漂移向量可通过计算公式(9)中的Mean Shift向量得到,如公式(13)所示,即

mh,G(y) 为目标由初始位置移动到当前位置的运动向量。由于应用Mean Shift 算法时首先应在当前帧中寻找目标的大概位置信息,再采用Mean Shift进行迭代搜索,因此当计算值为mh,G(y)<ε时,说明迭代计算已达到收敛状态,即可得到目标模型的最优位置,实现高速公路车辆流量检测。
2 实验结果与分析
为验证基于点云数据和图像处理技术的高速公路车辆流量检测方法的有效性,选取某区域高速公路作为实验对象。分别在不同路段、不同车道和不同光照条件三种情况下,对文献[4]中的方法、文献[5]中的方法和本文方法的车辆流量检测结果进行对比。首先对比三种方法的准确率,如表1所示。

表1 三种方法不同路段检测结果对比Tab.1 Comparison of detection results of three methods in different road sections
表1 所示为三种方法对不同路段高速公路车辆流量检测结果,可以发现本文方法在检测三段路段中车辆流量的平均准确率可达到96%,准确率较高;文献[4]中的方法在三次检测中车辆流量的平均准确率是90.1%;文献[5]中的方法在三次检测中的平均准确率是89.5%。实验证明:本文方法在对不同路段车辆流量检测中,准确率较高。
为继续对比三种方法,再次对比不同车道情况下三种方法的检测效果,结果如表2所示。
由表2 可知,文献[4]中的方法和文献[5]中的方法在单车道和双车道情况下车辆流量检测准确率可达90% 以上,但是在双向双车道和双向四车道这种车辆较多的情况下,检测准确率降低,最高不到90%。而本文方法在不同车道情况下检测准确率较为稳定,在车辆较少的单车道和双车道环境中检测率可达96% 以上,在车辆较多的双向双车道和双向四车道环境中,检测率也在95% 以上。由此可见本文方法对高速公路不同车道情况下车辆流量检测均具备较高的准确率。为了更准确地证实这一结论,再次进行对比,得到结果如图1所示。
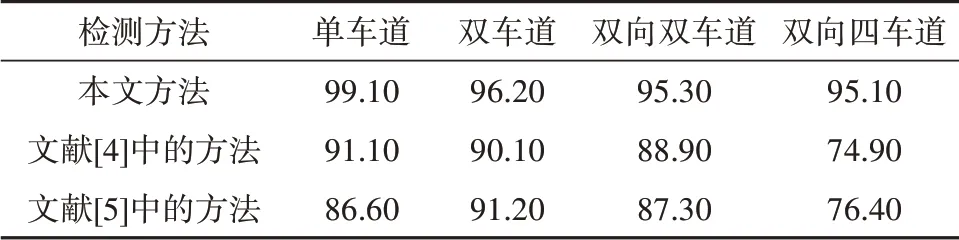
表2 不同车道情况下三种方法检测结果对比Tab.2 Comparison of detection results of three methods under different lane conditions

图1 三种方法不同光照条件下检测效果对比Fig. 1 Comparison of detection effect of three methods un‐der different light conditions
由图1 可知,文献[4]中的方法对高速公路车辆流量检测受光照影响较大,在晴天和清晨时检测准确性较强,准确率可达85% 以上,但是阴天和夜晚时检测准确率下降,仅处于76% 左右;文献[4]中的方法情况相似,在晴天和清晨检测准确率达86% 以上,阴天和夜晚时准确率下降,最低不到79%;而本文方法在四种不同光照条件下,检测准确率高于94%。实验表明:本文方法受光照影响较小,不同光照条件下检测准确率都较高。
3 结论
为提高高速公路车辆检测水平,本文利用点云数据和图像处理技术相结合的方法对高速公路车辆流量进行检测,并通过对比实验验证在不同路况、不同车道和不同光照条件下本文方法的检测效果,得出本文方法在应用中的准确率最高。虽然本文方法在车辆流量检测方面取得了一定的研究成果,但由于并未对高速公路道路边障碍物对车辆流量检测的影响加以考虑,今后会在该方面展开相关研究。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
中国交通信息化(2020年11期)2021-01-14
红领巾·萌芽(2019年8期)2019-08-27
中国交通信息化(2018年5期)2018-08-21
中国与非洲(法文版)(2017年10期)2017-11-23
